2024, 46(11): 4236-4246.
doi: 10.11999/JEIT240257
摘要:
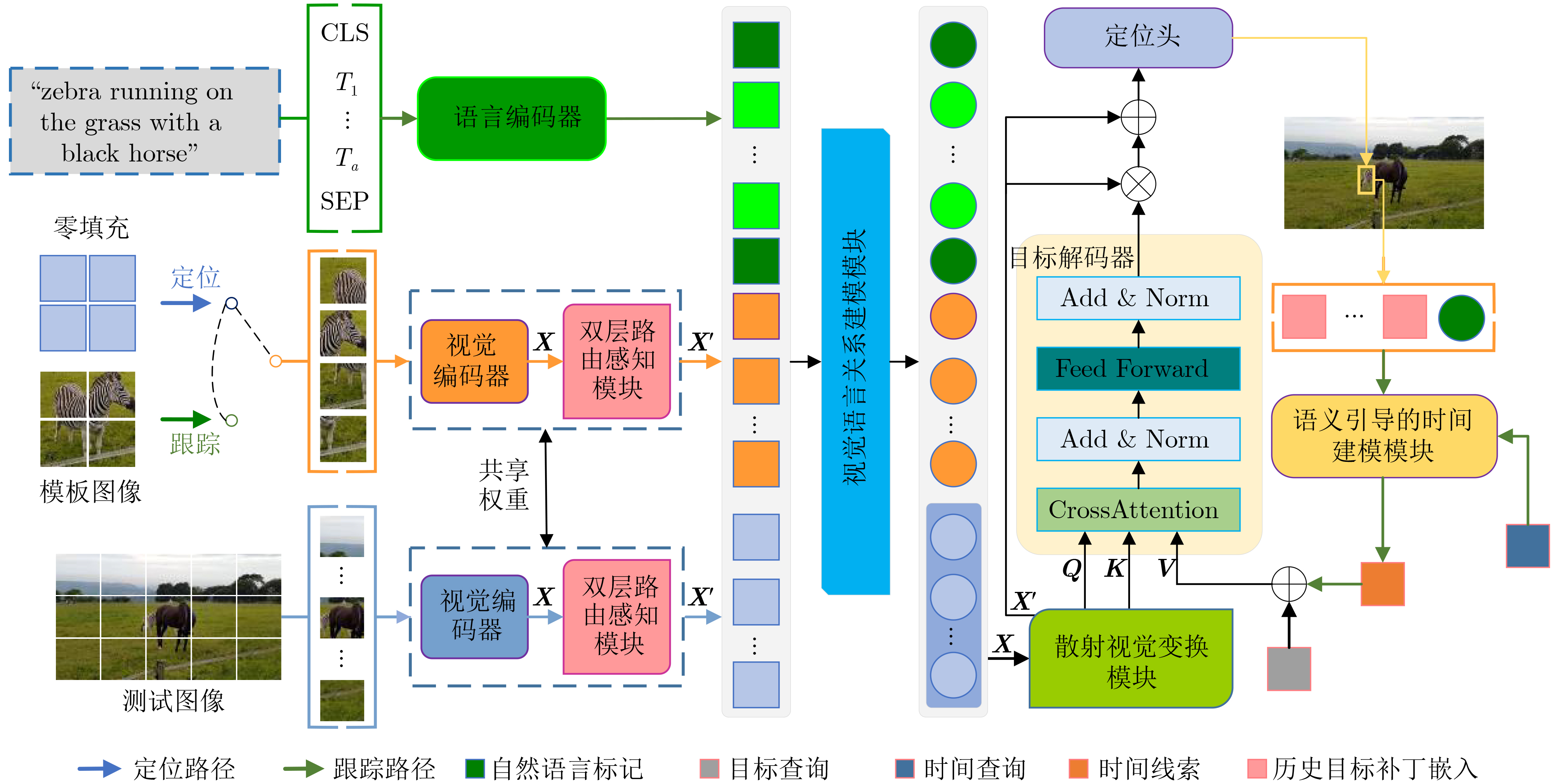
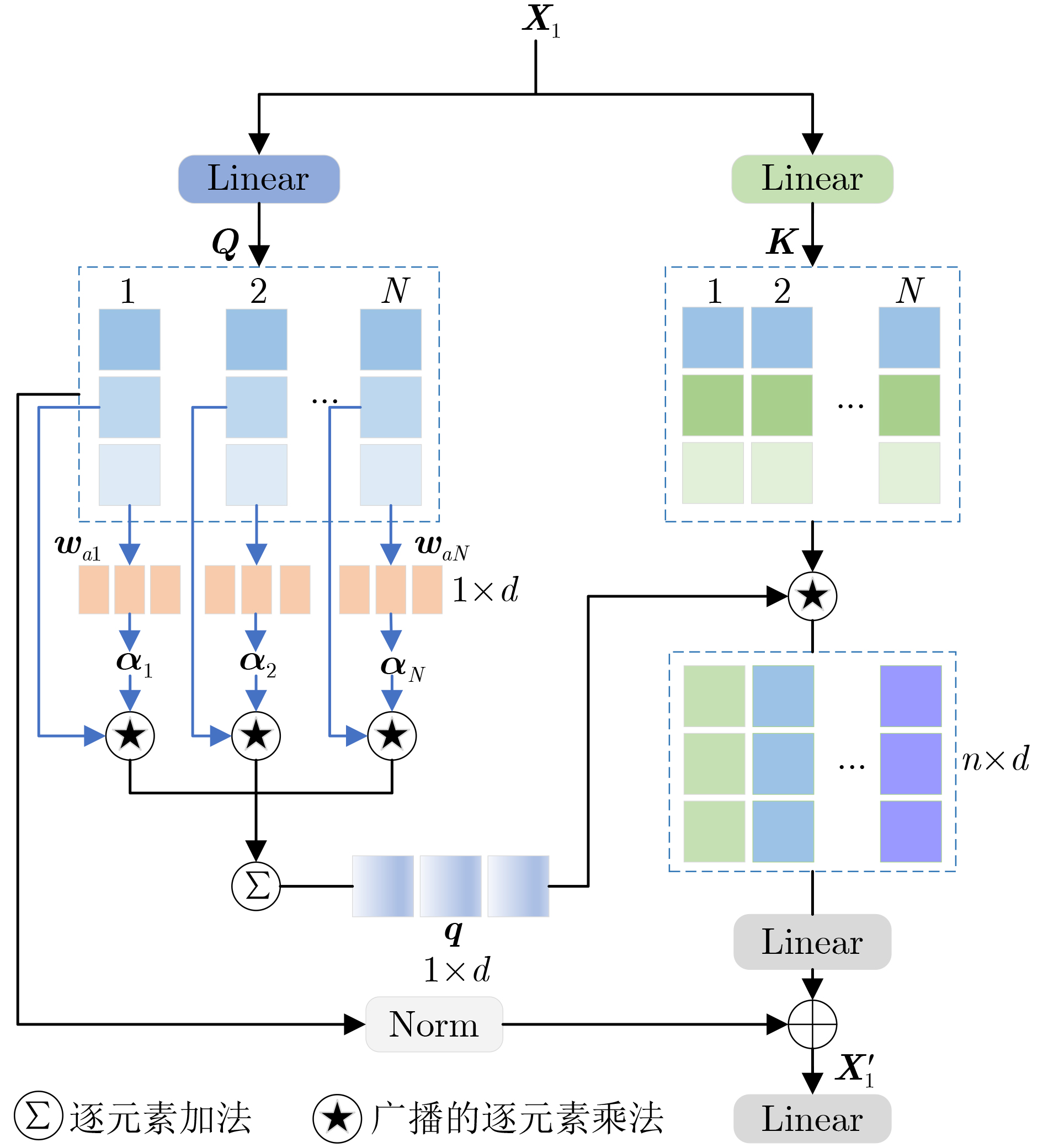
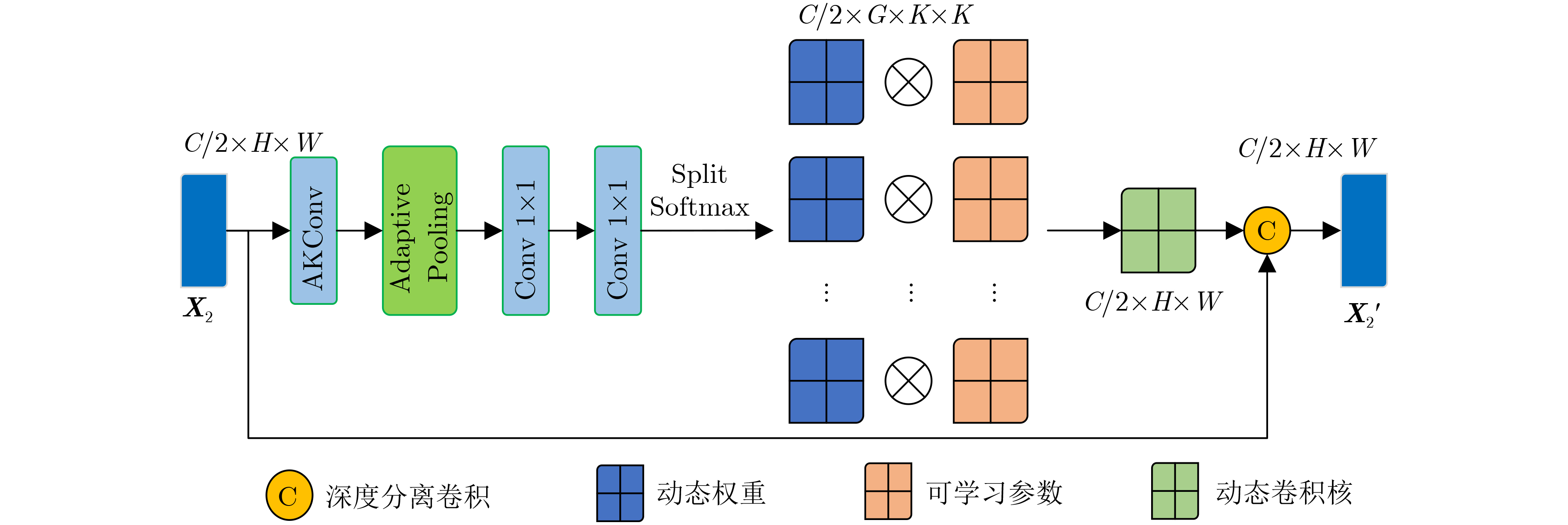
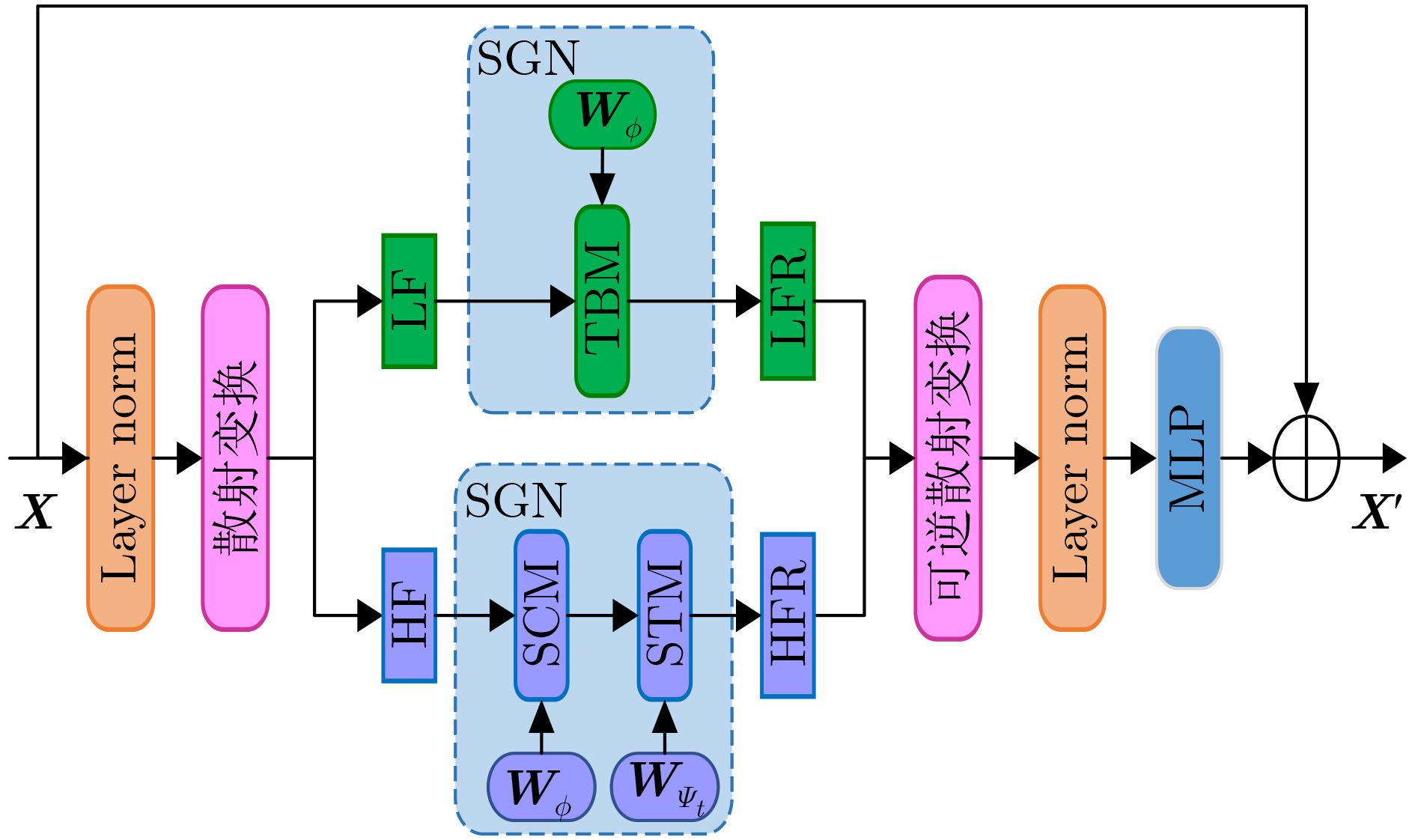
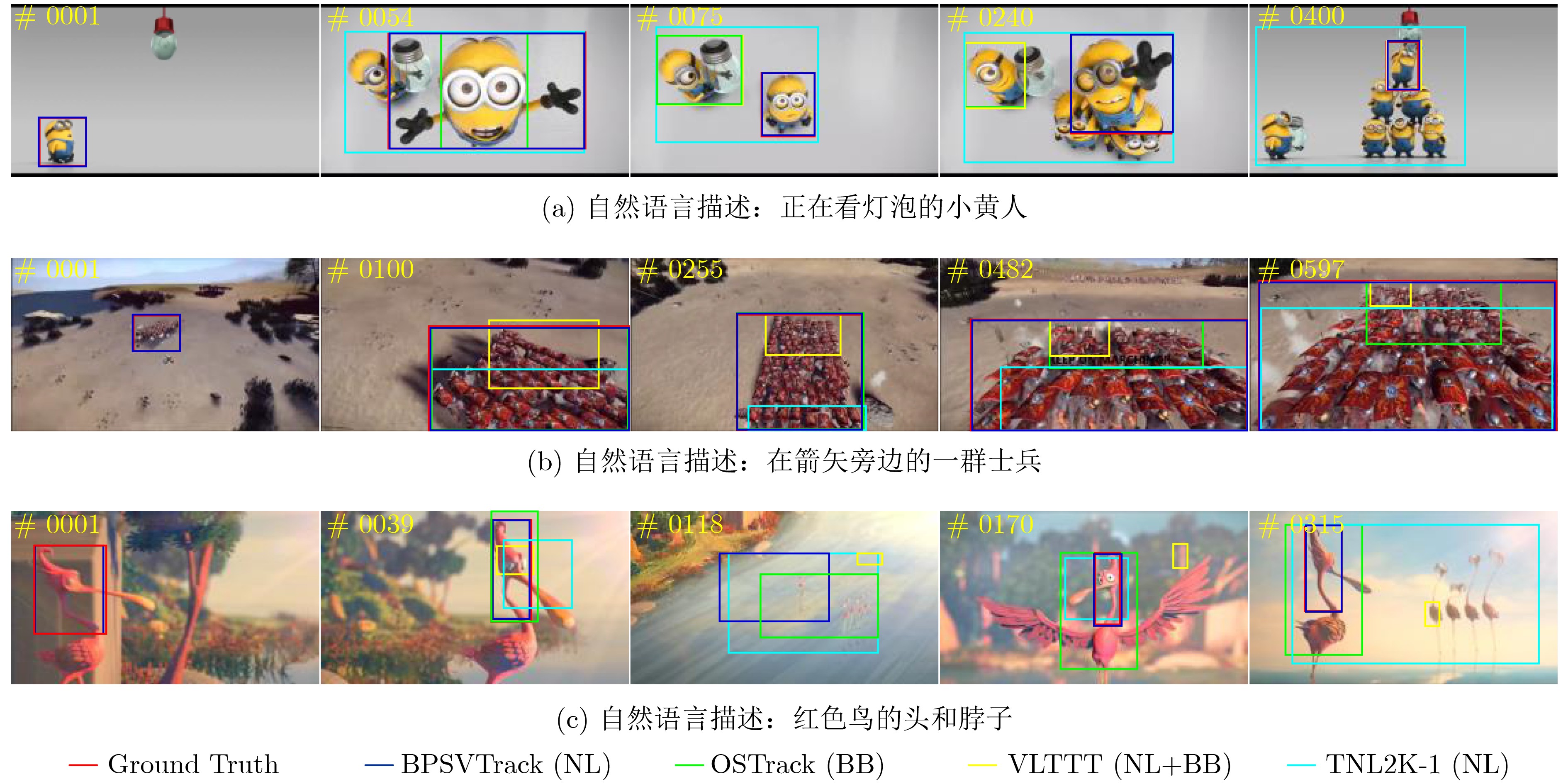
针对视觉-语言关系建模中存在感受野有限和特征交互不充分问题,该文提出一种结合双层路由感知和散射视觉变换的视觉-语言跟踪框架(BPSVTrack)。首先,设计了一种双层路由感知模块(BRPM),通过将高效的加性注意力(EAA)与双动态自适应模块(DDAM)并行结合起来进行双向交互来扩大感受野,使模型更加高效地整合不同窗口和尺寸之间的特征,从而提高模型在复杂场景中对目标的感知能力。其次,通过引入基于双树复小波变换(DTCWT)的散射视觉变换模块(SVTM),将图像分解为低频和高频信息,以此来捕获图像中目标结构和细粒度信息,从而提高模型在复杂环境下的鲁棒性和准确性。在OTB99, LaSOT, TNL2K 3个跟踪数据集上分别取得了86.1%, 64.4%, 63.2%的精度,在RefCOCOg数据集上取得了70.21%的准确率,在跟踪和定位方面的性能均优于基准模型。