

A Design of On-chip Network with Self-adaptive Fault-Tolerant Link
-
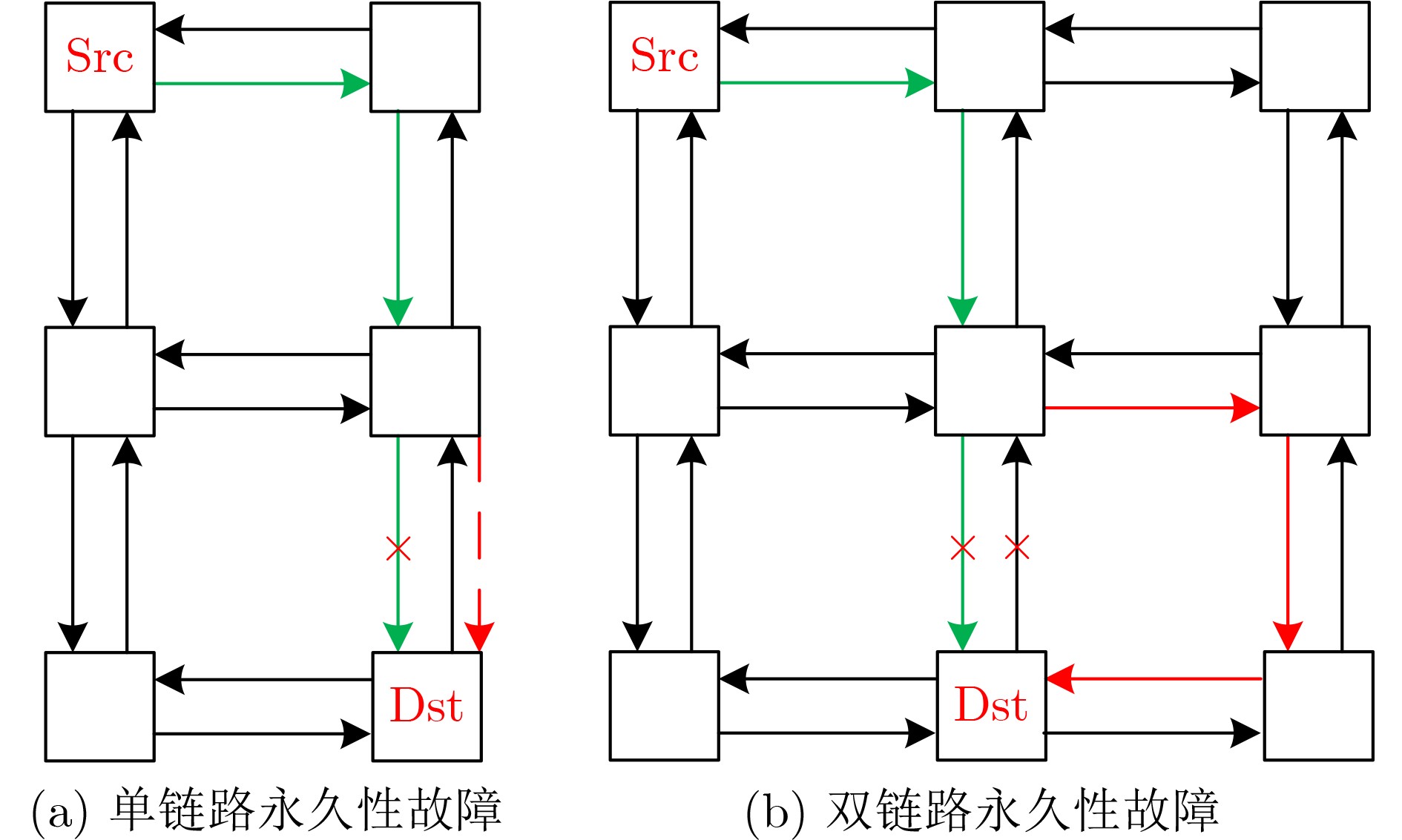
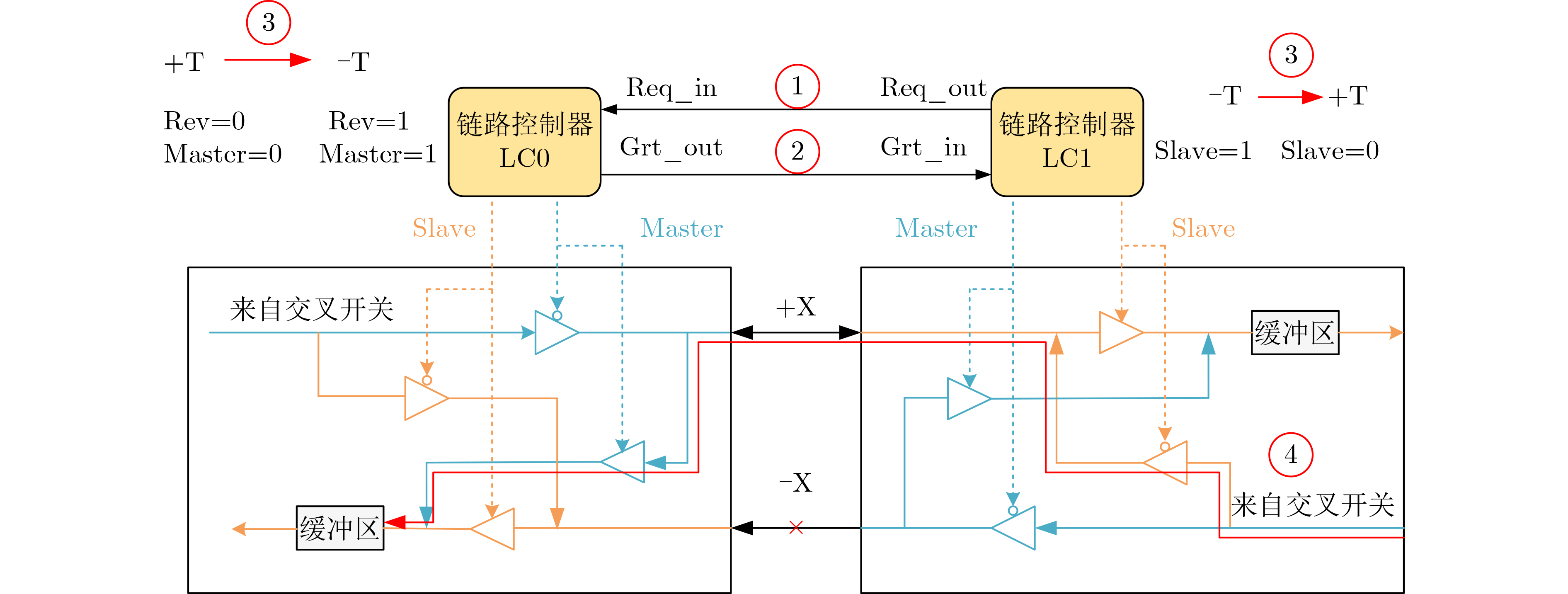
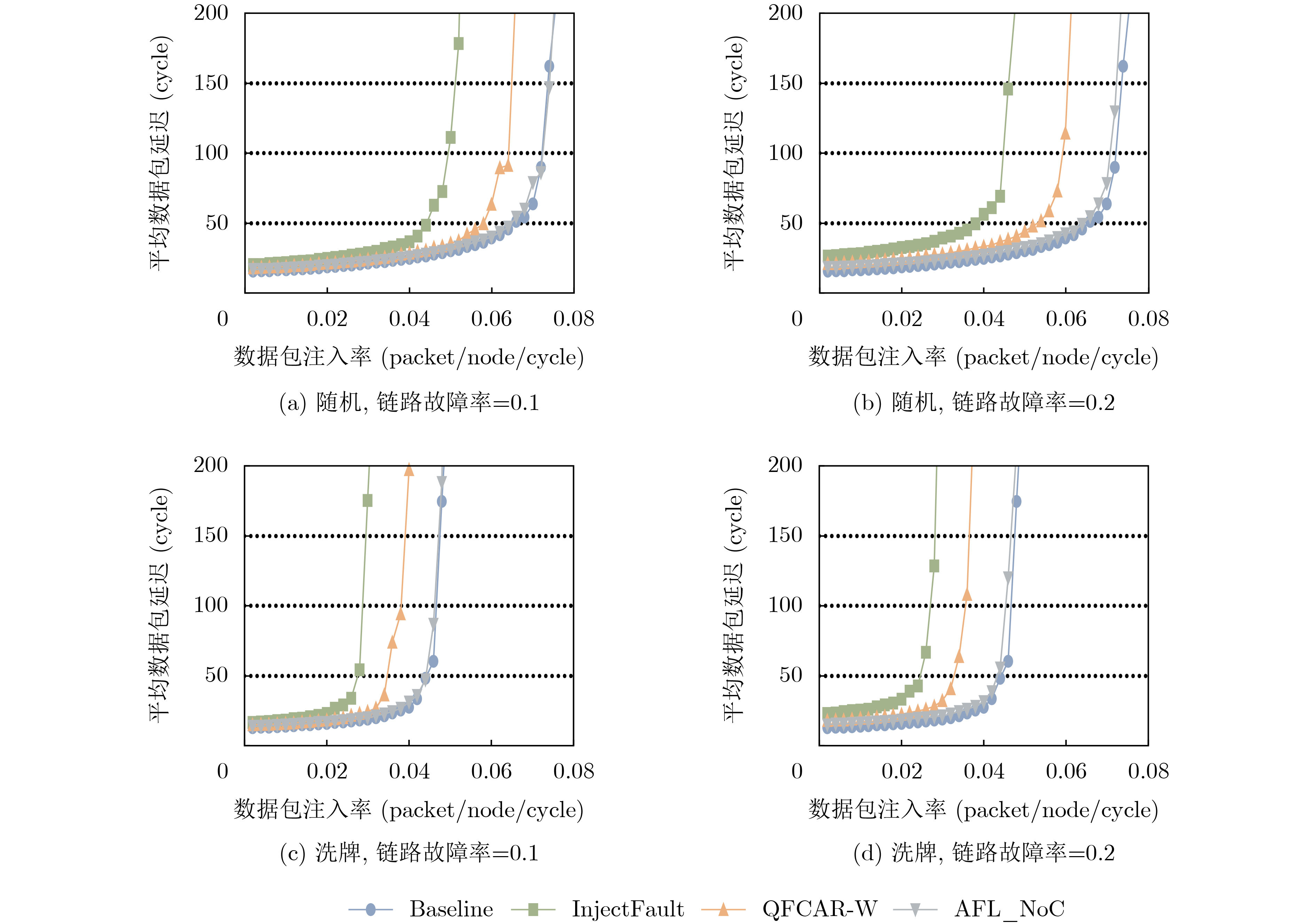
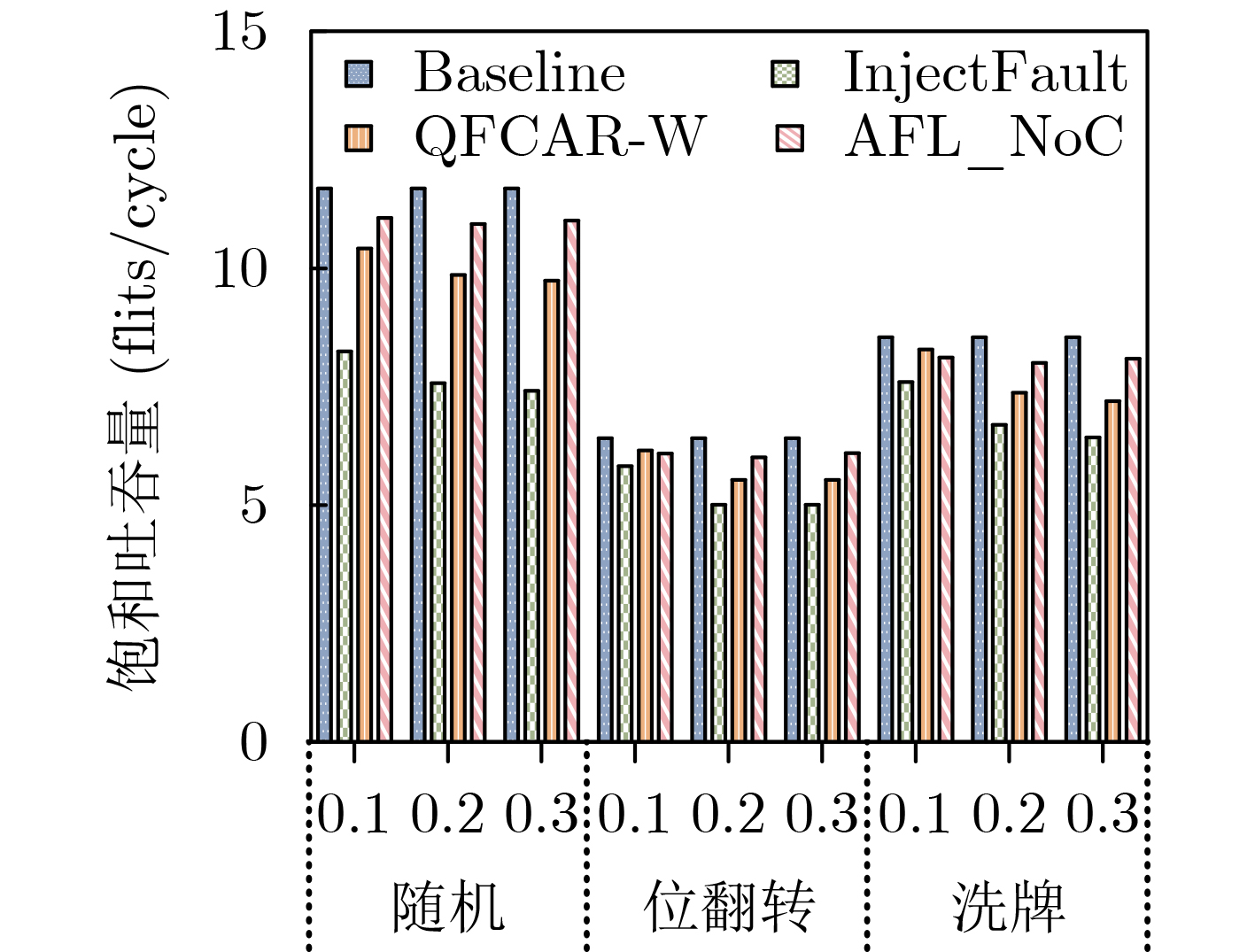
摘要: 随着芯片制程不断深入到亚微纳米级别,技术节点的持续缩小加速了片上网络中链路故障的发生。故障链路的增多降低了可用的路由路径数量,并可能导致严重的流量拥塞甚至系统崩溃。为了保证在遭遇故障链路时数据包的正常传输,该文提出一种基于自适应容错链路的片上网络设计(AFL_NoC),它能够将遭遇故障链路的数据包转发到另一条可逆链路上。该方案包括了可逆链路的具体实现以及相应的分布式控制协议。这种动态容错链路设计充分利用了网络中空闲的可用链路资源,确保了在遭遇链路故障的情况下网络通信不会中断。与先进的容错偏转路由算法QFCAR-W相比,AFL_NoC平均延迟降低10%,面积开销减少了14.2%,功耗开销减少了9.3%。Abstract: As chip manufacturing has advanced to the sub-micro-nanometer scale, shrinking technology nodes are accelerating link failures in on-chip network, and the growth of failure links reduces the number of available routing paths and might lead to severe traffic congestion or even system crashes. The difficulty in maintaining the correctness of the on-chip system dramatically rises as the technology node shrinks. Previous schemes typically utilize deflection algorithms to bypass packets. However, they incur additional transmission latency due to hop count and raise the probability of deadlock. In order to achieve normal packet transmission when encountering faulty links, a self-Adaptive Fault-tolerant Link NoC design (AFL_NoC) is proposed, which redirects packets encountering a faulty link to another reversible link. The scheme contains a specific implementation of the reversible link and the associated distributed control protocol. The dynamic fault-tolerant link design fully utilizes the idle, available link and ensures that the network communication is not interrupted in case of link failures. Compared with the advanced fault-tolerant deflection routing algorithm QFCAR-W, AFL_NoC can reduce the average delay by 10%, the area overhead by 14.2%, and the power overhead by 9.3%.
-
Key words:
- System-on-Chip (SoC) /
- Network-on-Chip (NoC) /
- Fault-tolerance /
- Router architecture /
- Routing algorithm
-
[1] LIANG Huaguo, XU Xiumin, HUANG Zhengfeng, et al. A methodology for characterization of SET propagation in SRAM-based FPGAs[J]. IEEE Transactions on Nuclear Science, 2016, 63(6): 2985–2992. doi: 10.1109/TNS.2016.2620165. [2] WANG Ke and LOURI A. CURE: A high-performance, low-power, and reliable network-on-chip design using reinforcement learning[J]. IEEE Transactions on Parallel and Distributed Systems, 2020, 31(9): 2125–2138. doi: 10.1109/TPDS.2020.2986297. [3] BHOWMIK B. Maximal connectivity test with channel-open faults in on-chip communication networks[J]. Journal of Electronic Testing, 2020, 36(3): 385–408. doi: 10.1007/S10836-020-05878-1. [4] DITOMASO D, BORATEN T, KODI A, et al. Dynamic error mitigation in NoCs using intelligent prediction techniques[C]. 2016 49th Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Taipei, China, 2016: 1–12. doi: 10.1109/MICRO.2016.7783734. [5] CHANG Y C, GONG C S A, and CHIU C T. Fault-tolerant mesh-based NoC with router-level redundancy[J]. Journal of Signal Processing Systems, 2020, 92(4): 345–355. doi: 10.1007/S11265-019-01476-3. [6] GUO Pengxing, HOU Weigang, GUO Lei, et al. Fault-tolerant routing mechanism in 3D optical network-on-chip based on node reuse[J]. IEEE Transactions on Parallel and Distributed Systems, 2020, 31(3): 547–564. doi: 10.1109/TPDS.2019.2939240. [7] NARAYANASAMY P and GOPALAKRISHNAN S. Novel fault tolerance topology using corvus seek algorithm for application specific NoC[J]. Integration, 2023, 89: 146–154. doi: 10.1016/J.VLSI.2022.11.011. [8] SLEEBA S Z, JOSE J, and MINI M G. Energy-efficient fault tolerant technique for deflection routers in two-dimensional mesh Network-on-Chips[J]. IET Computers & Digital Techniques, 2018, 12(3): 69–79. doi: 10.1049/IET-CDT.2017.0006. [9] SAMALA J, TAKAWALE H, CHOKHANI Y, et al. Fault-tolerant routing algorithm for mesh based NoC using reinforcement learning[C]. 2020 24th International Symposium on VLSI Design and Test (VDAT), Bhubaneswar, India, 2020: 1–6. doi: 10.1109/VDAT50263.2020.9190340. [10] LIU Yi, GUO Rujia, XU Changqing, et al. A Q-learning-based fault-tolerant and congestion-aware adaptive routing algorithm for networks-on-chip[J]. IEEE Embedded Systems Letters, 2022, 14(4): 203–206. doi: 10.1109/LES.2022.3176233. [11] JAIN A, LAXMI V, TRIPATHI M, et al. TRACK: An algorithm for fault-Tolerant, dynamic and scalable 2D mesh network-on-chip routing reconfiguration[J]. Integration, 2020, 72: 92–110. doi: 10.1016/J.VLSI.2020.01.005. [12] ZHANG Ying, HONG Xinpeng, CHEN Zhongsheng, et al. A deterministic-path routing algorithm for tolerating many faults on very-large-scale network-on-chip[J]. ACM Transactions on Design Automation of Electronic Systems (TODAES), 2021, 26(1): 8. doi: 10.1145/3414060. [13] LI Jiao, QIN Chaoqun, and SUN Xuecheng. An efficient adaptive routing algorithm for the Co-optimization of fault tolerance and congestion awareness based on 3D NoC[J]. Microelectronics Journal, 2023, 142: 105989. doi: 10.1016/J.MEJO.2023.105989. [14] RIZK M, MARTIN K J M, and DIGUET J P. Run-time remapping algorithm of dataflow actors on NoC-based heterogeneous MPSoCs[J]. IEEE Transactions on Parallel and Distributed Systems, 2022, 33(12): 3959–3976. doi: 10.1109/TPDS.2022.3177957. [15] WANG K, LOURI A, KARANTH A, et al. IntelliNoC: A holistic design framework for energy-efficient and reliable on-chip communication for manycores[C]. Proceedings of the 46th International Symposium on Computer Architecture, Phoenix, USA, 2019: 589–600. doi: 10.1145/3307650.3322274. [16] ZHENG Hao and LOURI A. Agile: A learning-enabled power and performance-efficient network-on-chip design[J]. IEEE Transactions on Emerging Topics in Computing, 2022, 10(1): 223–236. doi: 10.1109/TETC.2020.3003496. [17] LAN Y C, LIN H A, LO S H, et al. A bidirectional NoC (BiNoC) architecture with dynamic self-reconfigurable channel[J]. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2011, 30(3): 427–440. doi: 10.1109/TCAD.2010.2086930. [18] FARROKHBAKHT H, KAO H, HASAN K, et al. Pitstop: Enabling a virtual network free network-on-chip[C]. 2021 IEEE International Symposium on High-Performance Computer Architecture (HPCA), Seoul, Korea (South), 2021: 682–695. doi: 10.1109/HPCA51647.2021.00063. [19] SUN Chen, CHEN C H O, KURIAN G, et al. DSENT-a tool connecting emerging photonics with electronics for opto-electronic networks-on-chip modeling[C]. 2012 IEEE/ACM Sixth International Symposium on Networks-on-Chip, Lyngby, Denmark, 2012: 201–210. doi: 10.1109/NOCS.2012.31. [20] ZHOU Wu, OUYANG Yiming, XU Dongyu, et al. Energy-efficient multiple network-on-chip architecture with bandwidth expansion[J]. IEEE Transactions on Very Large Scale Integration (VLSI) Systems, 2023, 31(4): 442–455. doi: 10.1109/TVLSI.2023.3244859. -

 下载:
下载:



图(9)
计量
- 文章访问数: 875
- HTML全文浏览量: 554
- PDF下载量: 50
- 被引次数: 0
