2021, 43(3): 606-614.
doi: 10.11999/JEIT200685
Abstract:
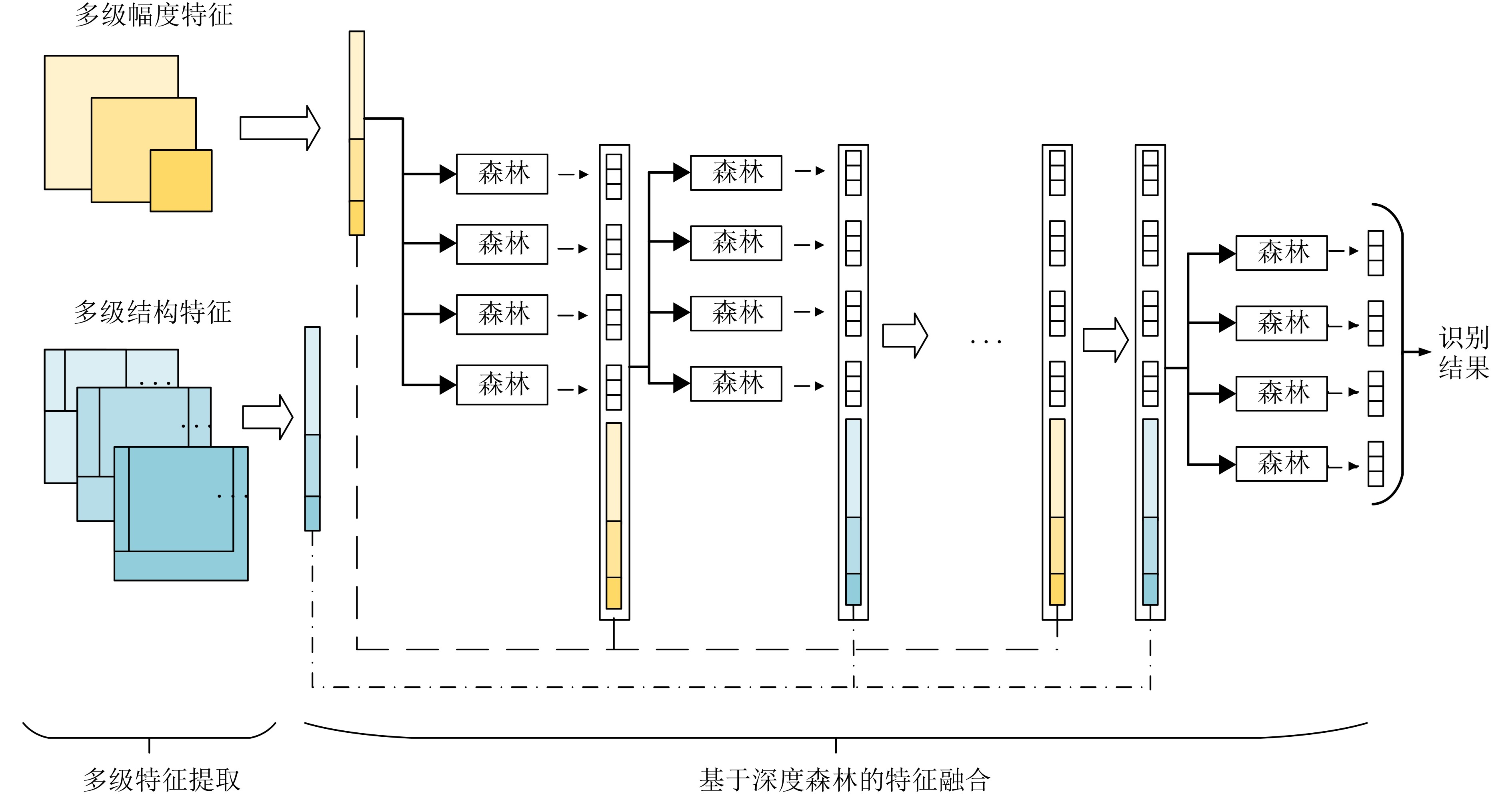
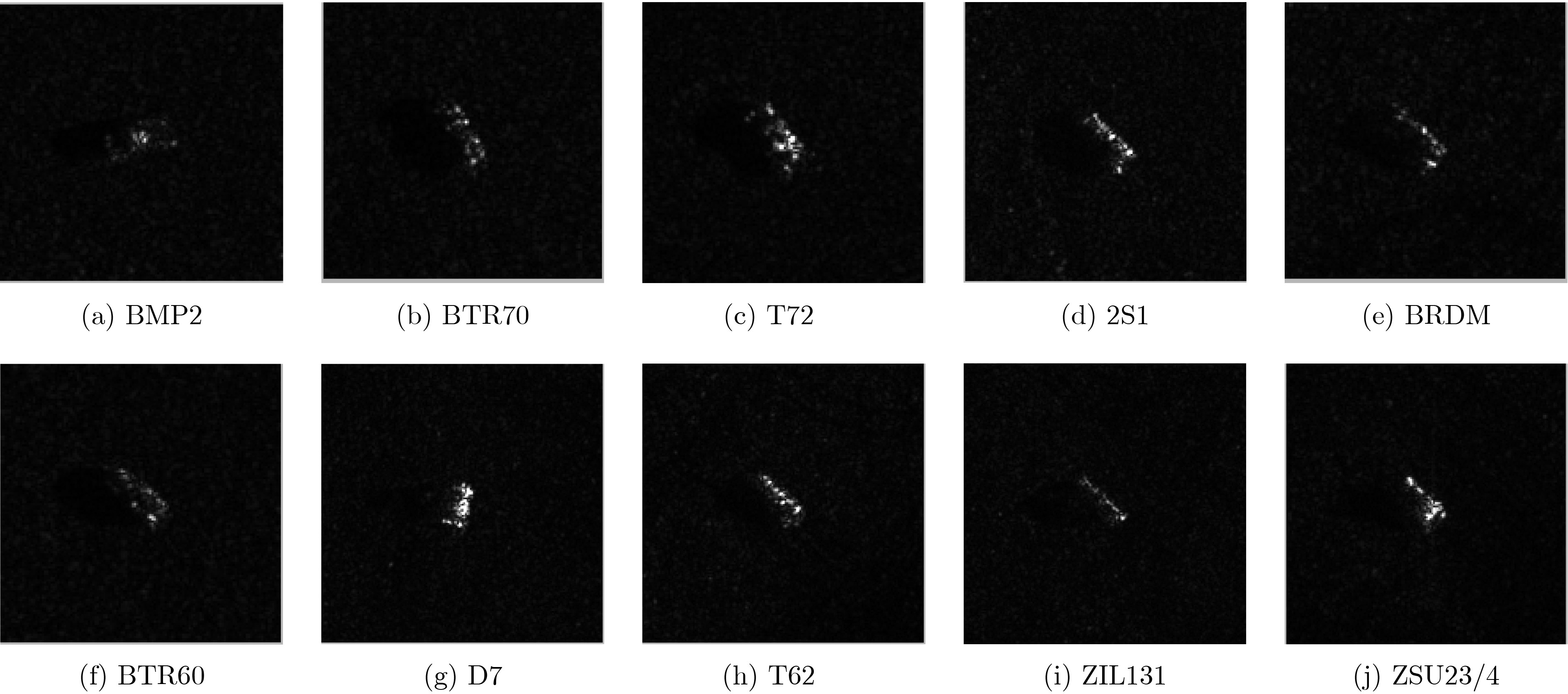
In most of Synthetic Aperture Radar (SAR) target recognition methods, only the amplitude feature, i.e., intensity of pixels, is used to recognize targets. Nevertheless, due to the speckle noise, only using the amplitude feature will affect the recognition performance. For further improving the recognition performance, in this paper, a novel multi-level feature fusion target recognition method based on deep forest for SAR images is proposed. At First, in the feature extraction step, two kinds of features, i.e., the multi-level amplitude feature and the multi-level Dense Scale-Invariant Feature Transform (Dense-SIFT) feature are extracted. The amplitude feature describes intensity information and the Dense-SIFT feature describes structure information. Furthermore, for each feature, its corresponding multi-level features are extracted to represent target information from local to global. Then, for reflecting target information more comprehensive and sufficient, the multi-level amplitude feature and the multi-level Dense-SIFT feature are jointly utilized profiting from the idea of deep forest. On the one hand, the cascade structure can fusion multi-level amplitude feature and the multi-level Dense-SIFT feature steadily. On the other hand, the deep feature representation can be mined by layer-by-layer feature transformation. Finally, the fusion feature is used to recognize targets. Experiments on the moving and stationary target acquisition and recognition data show that the proposed method is an effective target recognition method, and the recognition performance is robust to the hyper-parameters.