2022, 44(9): 3203-3211.
doi: 10.11999/JEIT210629
Abstract:
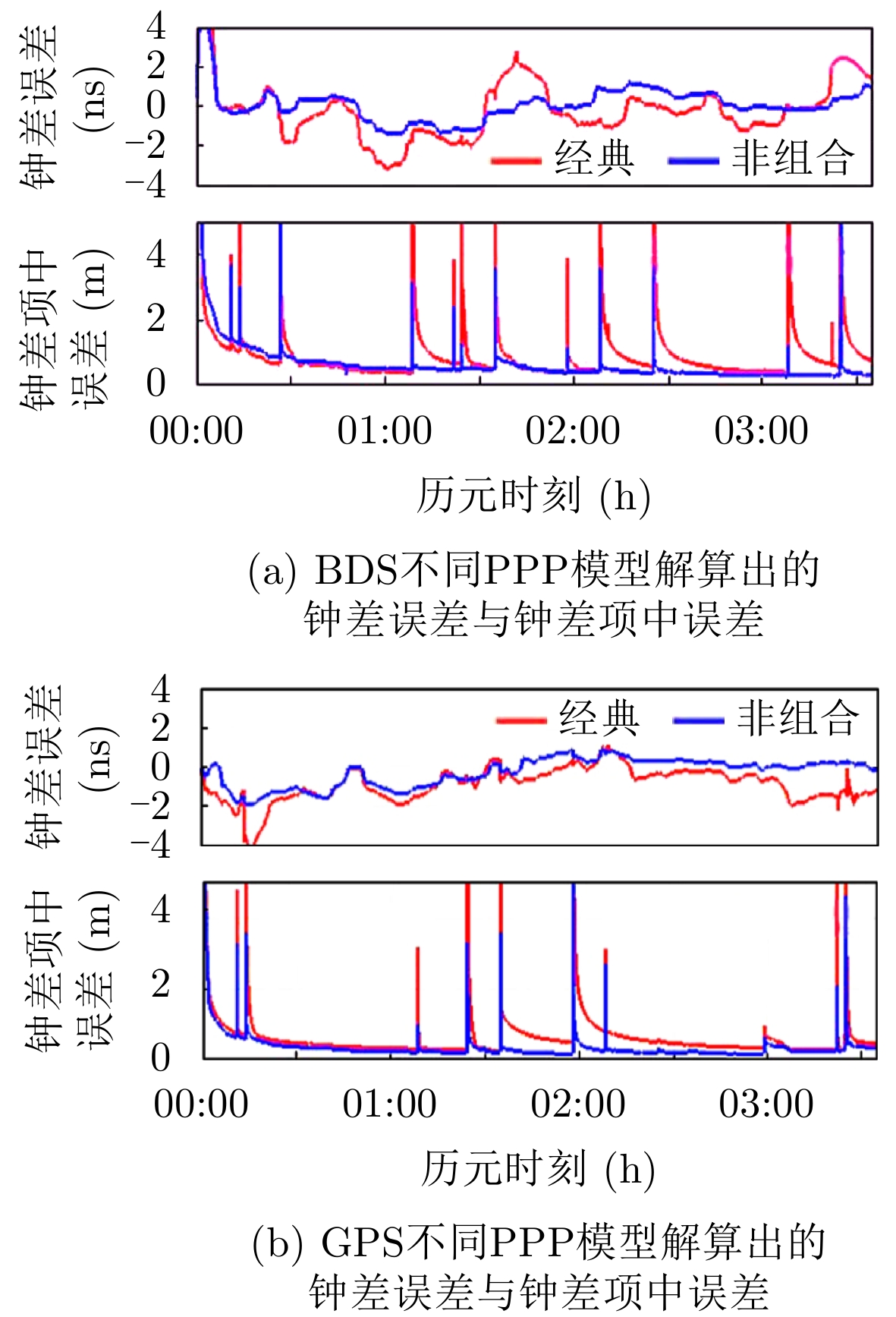
Precise Point Positioning (PPP) of Global Navigation Satellite System (GNSS) has the advantages of simple operation, low cost, and high positioning accuracy, and has been widely used in precise timing. Considering the problems of high combined noise of ionosphere-free PPP model, major navigation satellite system being Global Positioning System (GPS), and fewer real-time dynamic scenes in the existing research, the uncombined PPP model is used to study the accuracy of timing in BeiDou navigation Satellite system (BDS). Static and dynamic models of Kalman filter is used in parameter estimation. PPP processing strategies for static and real-time dynamic scenarios are proposed, and ultra-fast forecast ephemeris is used to ensure real time. The results show that: Under static and real-time dynamic conditions, the accuracy of precise timing with the uncombined PPP model is better than that of the ionosphere-free PPP model; Under static condition, considering that the positioning accuracy of BDS and GPS is equivalent, and the positioning accuracy of BDS in the Asia Pacific Region is even higher, the timing accuracy of BDS is slightly higher than that of GPS; Under real-time dynamic condition, the precise timing accuracy of BDS and GPS is both within 2 ns. But owing to Position Dilution Of Precision (PDOP), sudden changes of carrier speed, and environmental factors, the timing accuracy of BDS is slightly lower. And when the convergence is completed, the timing accuracy of the two systems is equivalent, and the clock biases are all within 0.3 m.