


















































































































































Email alert
Securely sharing and publishing location trajectory data relies on support of location privacy protection technology. Prior to the advent of differential privacy, K-anonymity and its derived models provide a means of quantitative assessment of location-trajectory privacy protection. However, its security relies heavily on the background knowledge of the attacker, and the model can not provide perfect privacy protection when a new attack occurs. Differential privacy effectively compensates for the above problems, and it proves the level of privacy protection based on rigorous mathematical theory and is increasingly used in the field of trajectory data privacy publishing. Therefore, the trajectory privacy protection technology based on differential privacy theory is studied and analyzed, and the methods of spatial statistical data publishing are introduced such as location histogram and trajectory histogram, the method of trajectory data set publishing and the model of continuous real-time location release privacy protection. At the same time, the existing methods are compared and analyzed, the key development directions are put forward in the future.
Quantum walks are raised for teleporting qubit or qudit. Based on quantum walk teleportation, an arbitrated quantum signature scheme with quantum walks on regular graphs is suggested, in which the entanglement source does not need preparing ahead. In the initial phase, the secret keys are generated via quantum key distribution system. In the signing phase, the signature for the transmitted message is created by the signer. Teleportation of quantum walks on regular graphs is applied to teleporting encrypted message copy from the signer to the verifier. Concretely, the sender encodes the ciphertext of message copy on coin state. Then two-step quantum walks are performed on the initial system state engendering the necessary entangled state for quantum teleportation, which can be the basis of signature generation and verification. In the verifying phase, the verifier verifies the validity of the completed signature under the aid of an arbitrator. Additionally, the applications of random number and public board deter the verifier’s existential forgery and repudiation attacks before the verifier accepts the true message. Analyses show that the suggested arbitrated quantum signature algorithm satisfies the general two requirements, i.e., impossibility of disavowal from the signer and the verifier and impossibility of forgery from anyone. The discussions demonstrate that the scheme may not prevent disavowal attack from the signer and that the corresponding improvements are presented. The scheme may be realizable because quantum walks have experimentally proven to be implementable in different physical systems.
To improve the efficiency of the triangularization of ideal lattice basis, a fast algorithm for triangularizing an ideal lattice basis is proposed by studying the polynomial structure, which runs in time O(n3log2B), where n is the dimension of the lattice, B is the infinity norm of lattice basis. Based on the algorithm, a deterministic algorithm for computing the Smith Normal Form (SNF) of ideal lattice is given, which has the same time complexity and thus is faster than any previously known algorithms. Moreover, for a special class of ideal lattices, a method to transform such triangular bases into Hermite Normal Form (HNF) faster than previous algorithms will be present.
In radio monitoring and target location applications, the received signals are often affected by complex electromagnetic environment, such as impulsive noise and cochannel interference. Traditional signal processing methods based on second-order statistics often fail to work properly. The signal processing methods based on fractional lower order statistics also encounter difficulties due to their dependence on prior knowledge of signals and noises. In recent years, the theory and method of correntropy and cyclic correntropy signal processing, which are widely concerned in the field of signal processing, are put forward. They are effective technical means to solve the problems of signal analysis and processing, parameter estimation, target location and other applications to complex electromagnetic environment. They promote greatly the development of the theory and application of non-Gaussian and non-stationary signal processing. This paper reviews systematically the basic theory and methods of correntropy and cyclic correntropy signal processing, including the background, definition, properties and characteristics of correntropy and cyclic correntropy, as well as their mathematical and physical meanings. This paper introduces also the applications of correntropy and cyclic correntropy signal processing to many fields, hoping to benefit the research and application of non-Gaussian and non-stationary statistical signal processing.
Automatic Target Recognition(ATR) is an important research area in the field of radar information processing. Because the deep Convolution Neural Network(CNN) does not need to carry out feature engineering and the performance of image classification is superior, it attracts more and more attention in the field of radar automatic target recognition. The application of CNN to radar image processing is reviewed in this paper. Firstly, the related knowledges including the characteristics of the radar image is introduced, and the limitations of traditional radar automatic target recognition methods are pointed out. The principle, composition, development of CNN and the field of computer vision are introduced. Then, the research status of CNN in radar automatic target recognition is provided. The detection and recognition method of SAR image are presented in detail. The challenge of radar automatic target recognition is analyzed. Finally, the new theory and model of convolution neural network, the new imaging technology of radar and the application to complex environments in the future are prospected.
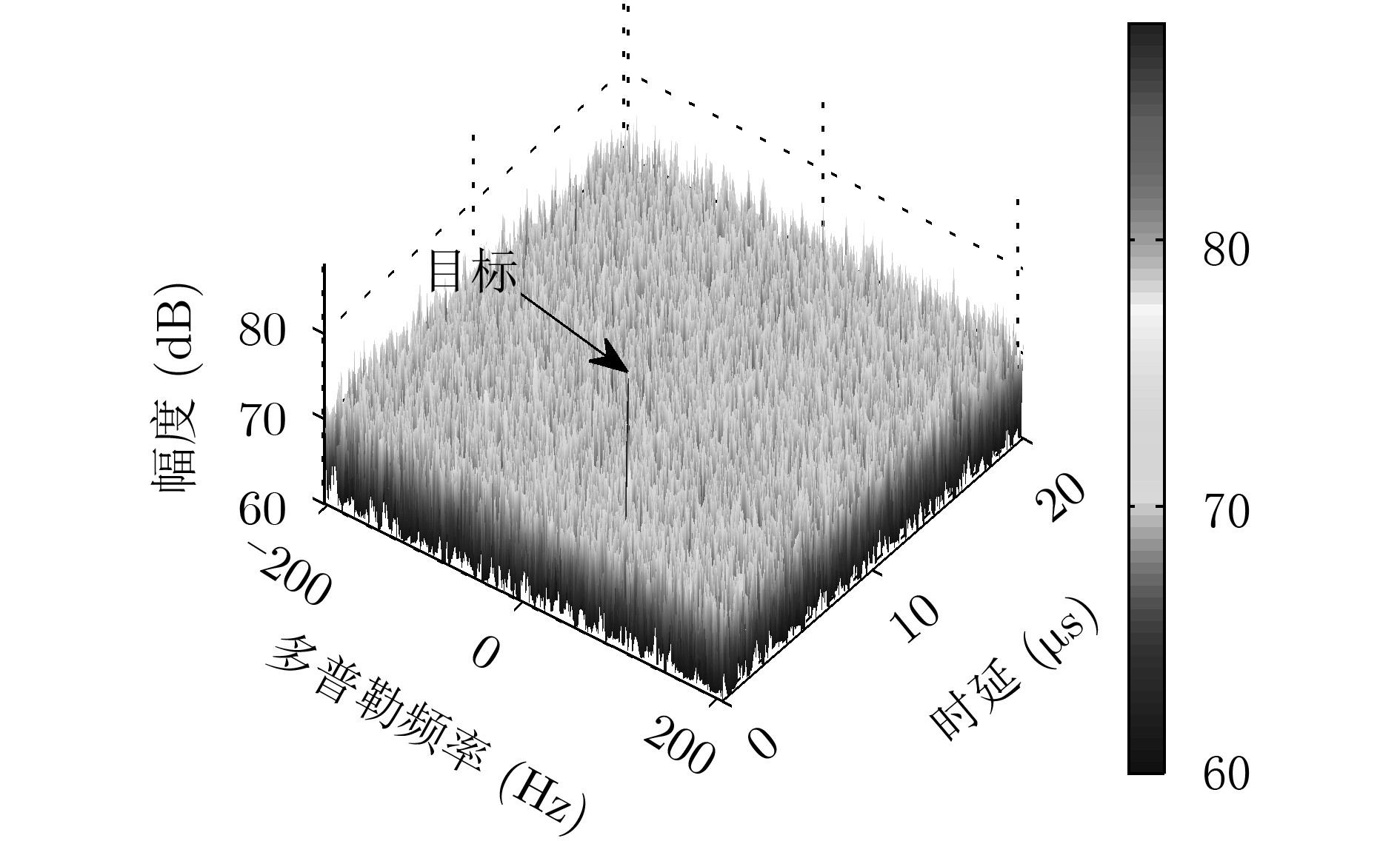
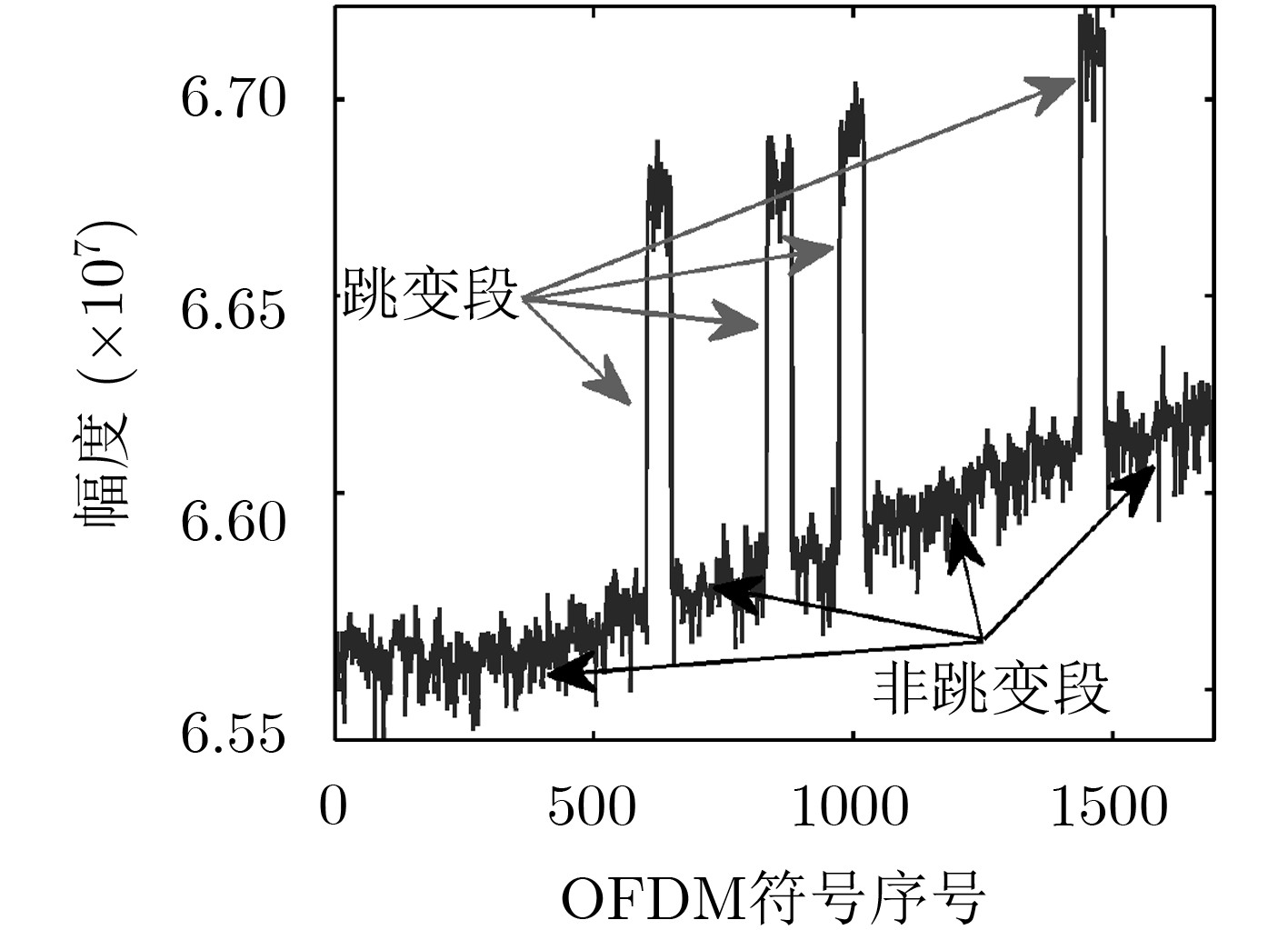
In the complex electromagnetic environment, multipath clutter in passive radar may be nonstationary and has jump characteristics. In order to suppress this kind of non-stationary clutter, a clutter suppression method is proposed based on channel segmentation and smoothing, which combines the Orthogonal Frequency Division Multiplexing (OFDM) modulation of the transmitting signal. First, the temporal domain signal model of the jumping clutter is established. Then it is transformed into subcarrier-domain by using the OFDM structure. After channel estimation of each OFDM symbol and smoothing the segmented channel estimation, the non-stationary clutter can be suppressed by the smoothed channel estimation and reference signal in each segment. Simulation and experiment data show that the proposed method can effectively suppress the non-stationary clutter with jumping characteristic.
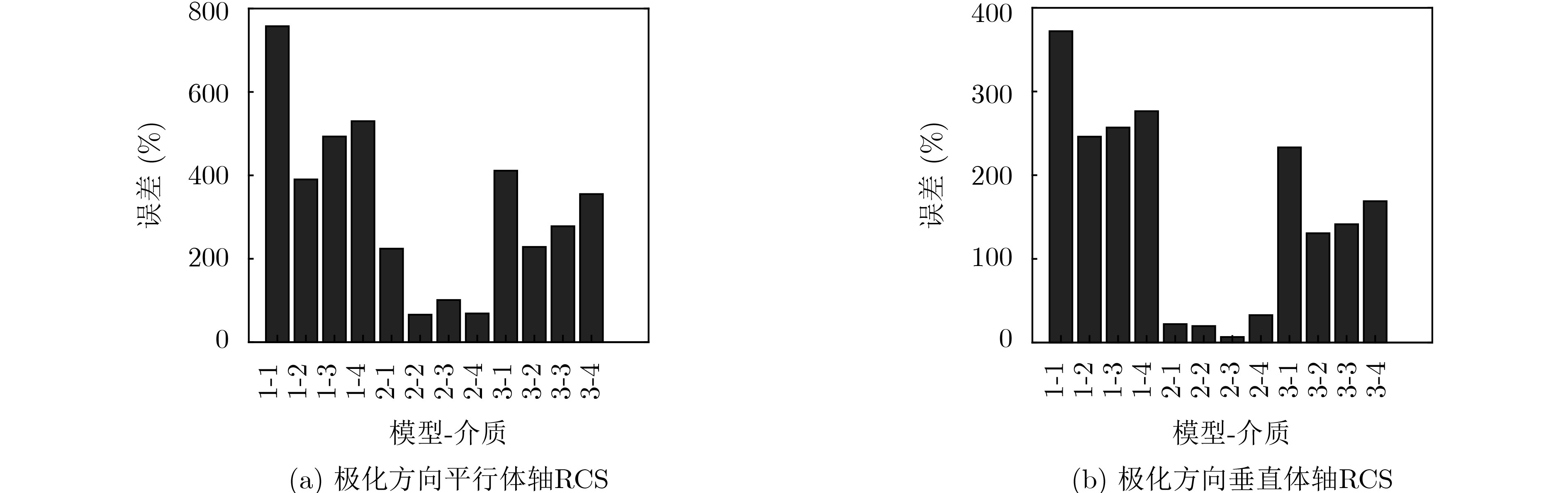
Insect radar is the most effective tool for insect migration observation. In order to realize target recognition of insect radar, it is important to study the RCS characteristics of insects. This paper will analyze the static and dynamic Radar Cross Section (RCS) characteristics of insects. Firstly, based on the measured X-band fully-polarimetric RCS data, the static RCS characteristics of insects are analyzed, including the variations of horizontal and vertical polarization RCS with body weight respectively, and the variation of insect polarization pattern with body weight. Secondly, the dielectrics and geometric models currently used to study the RCS characteristics of insects are summarized by electromagnetic simulation. Twelve dielectric models consisting of four dielectrics (including water, spinal cord, dry skin, and chitin and hemolymph mixture) and three geometric models (including equivalent size prolate spheroid, equivalent mass prolate spheroid and triaxial prolate spheroid) are compared, and it be found that the RCS characteristics of equivalent mass prolate spheroid are closest to that of the real insects. Then, the fluctuation characteristics of insect dynamic RCS are analyzed based on the insect echo data measured in field by a Ku-band high-resolution insect radar. The measured insect dynamic RCS fluctuation data are fitted with four classical RCS fluctuation distribution models (χ2, Log-normal, Weibull and Gamma distribution), respectively. It can be seen from the least square error of fitting and goodness of fit test that Gamma distribution gives the best description of the statistical characteristics of insect RCS fluctuations. Finally, the application of insect RCS characteristics to insect orientation, mass and body length measurements for insect radars is summarized.
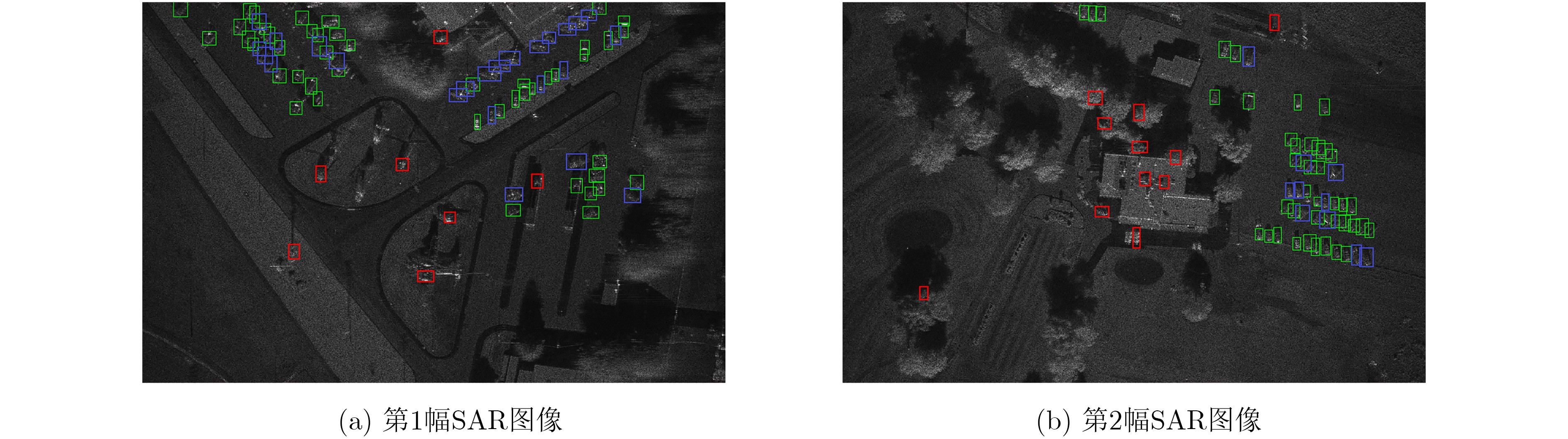
The current Synthetic Aperture Radar (SAR) target detection methods based on Convolutional Neural Network (CNN) rely on a large amount of slice-level labeled train samples. However, it takes a lot of labor and material resources to label the SAR images at slice-level. Compared to label samples at slice-level, it is easier to label them at image-level. The image-level label indicates whether the image contains the target of interest or not. In this paper, a semi-supervised SAR image target detection method based on CNN is proposed by using a small number of slice-level labeled samples and a large number of image-level labeled samples. The target detection network of this method consists of region proposal network and detection network. Firstly, the target detection network is trained using the slice-level labeled samples. After training convergence, the output slices constitute the candidate region set. Then, the image-level labeled clutter samples are input into the network and then the negative slices of the output are added to the candidate region set. Next, the image-level labeled target samples are input into the network as well. After selecting the positive and negative slices in the output of the network, they are added to the candidate region set. Finally, the detection network is trained using the updated candidate region set. The processes of updating candidate region set and training detection network alternate until convergence. The experimental results based on the measured data demonstrate that the performance of the proposed method is similar to the fully supervised training method using a much larger set of slice-level samples.
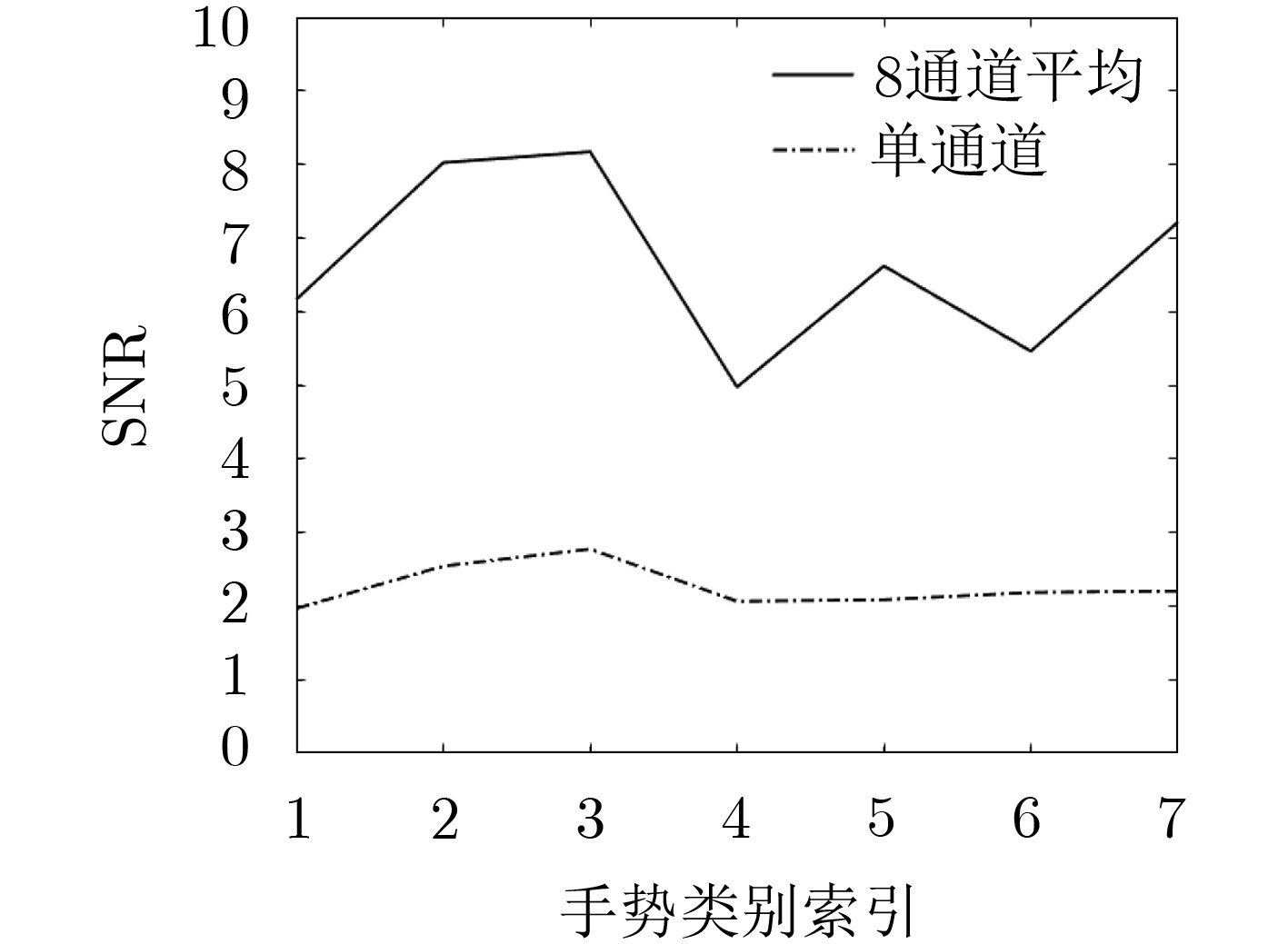
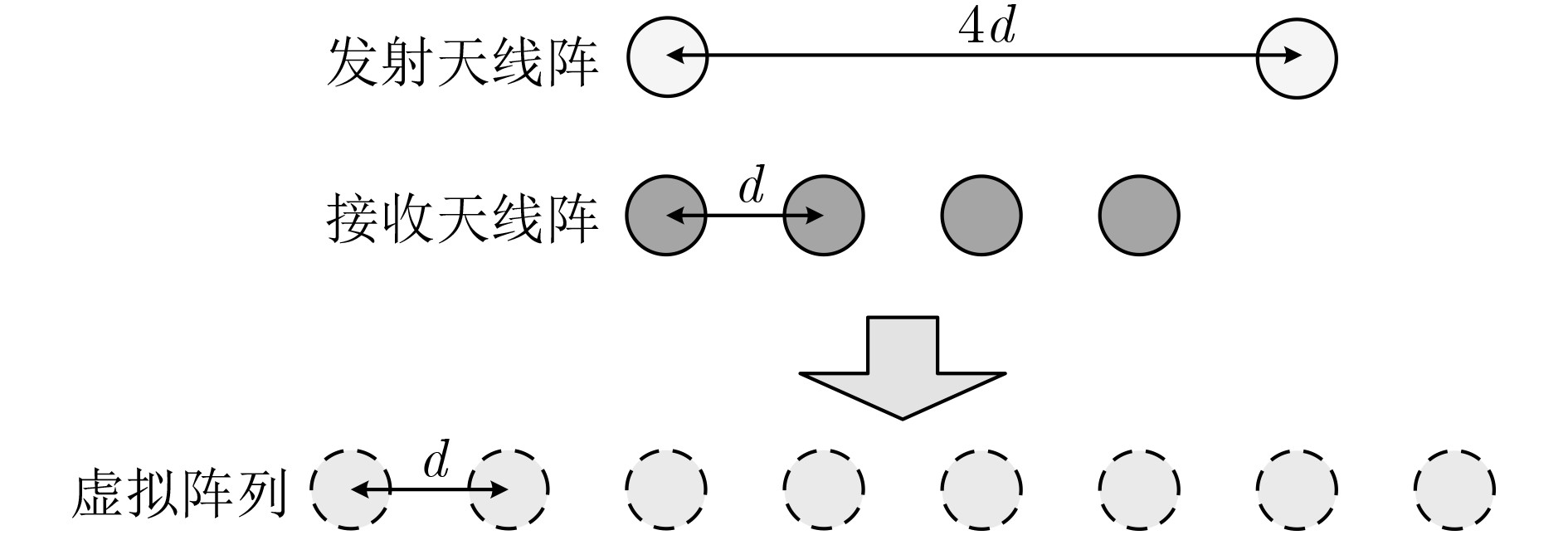
A micro-motion gesture recognition method based on multi-channel Frequency Modulated Continuous Wave (FMCW) millimeter wave radar is proposed, and an optimal radar parameter design criterion for feature extraction of micro-motion gestures is presented. The time-frequency analysis process is performed on the radar echo reflected by the hand, and the range Doppler spectrum, the range spectrum, the Doppler spectrum and the horizontal direction angle spectrum of the target are estimated. Then the range-Doppler-time-map feature is designed, range-time-map feature, Doppler-time-map feature, horizontal-angle-time-map feature, and three-joint feature with fixed frame time length are used to characterize the 7 classes micro-motion gestures, respectively. And these gesture features are captured and aligned according to the difference in amplitude and speed of the gesture motion process. Then a five-layer lightweight convolutional neural network is designed to classify the gesture features. The experimental results show that, the range-Doppler-time-map feature designed in this paper characterizes the micro-motion gesture more accurately and has a better generalization ability for untrained test objects compared with other features.
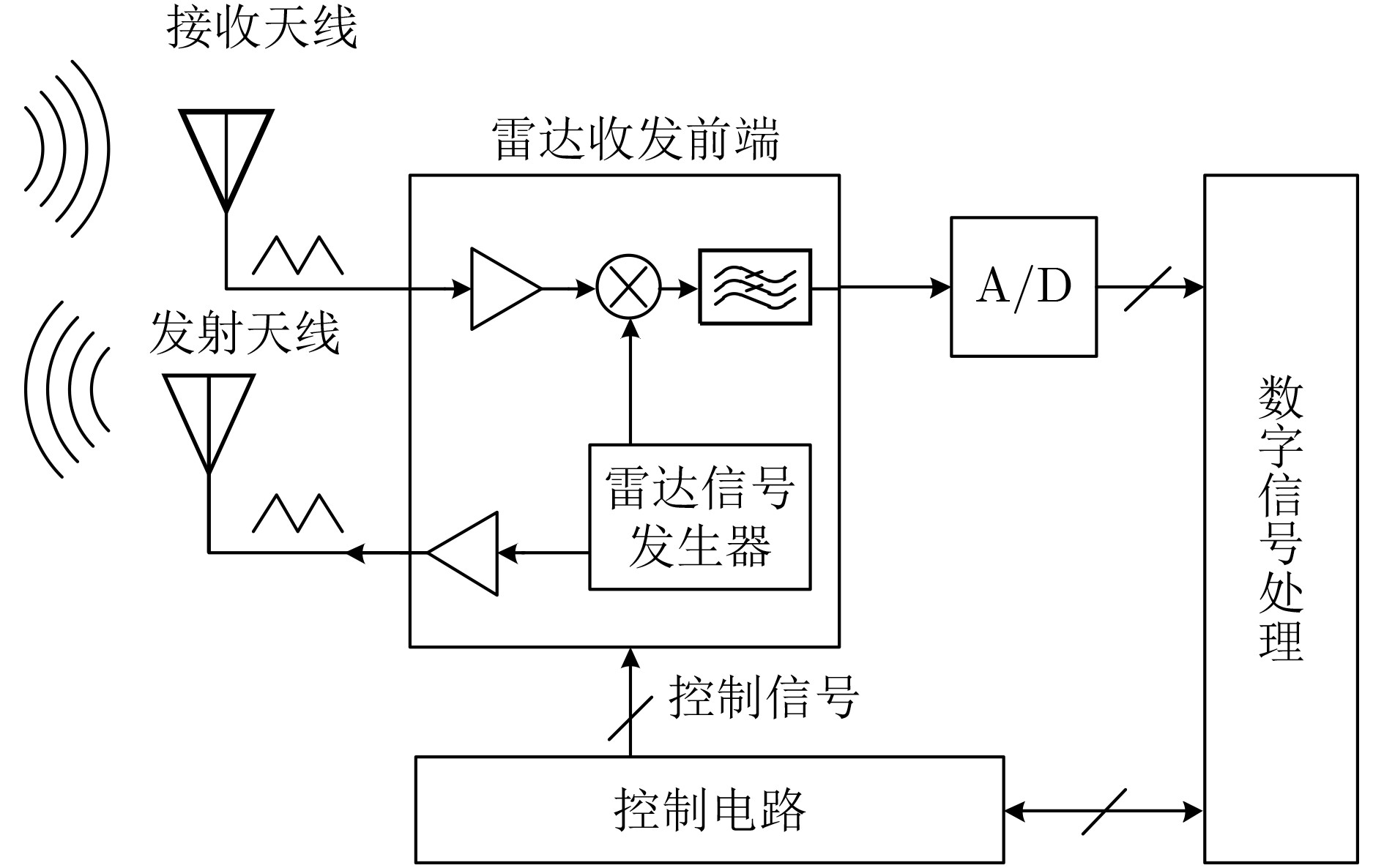
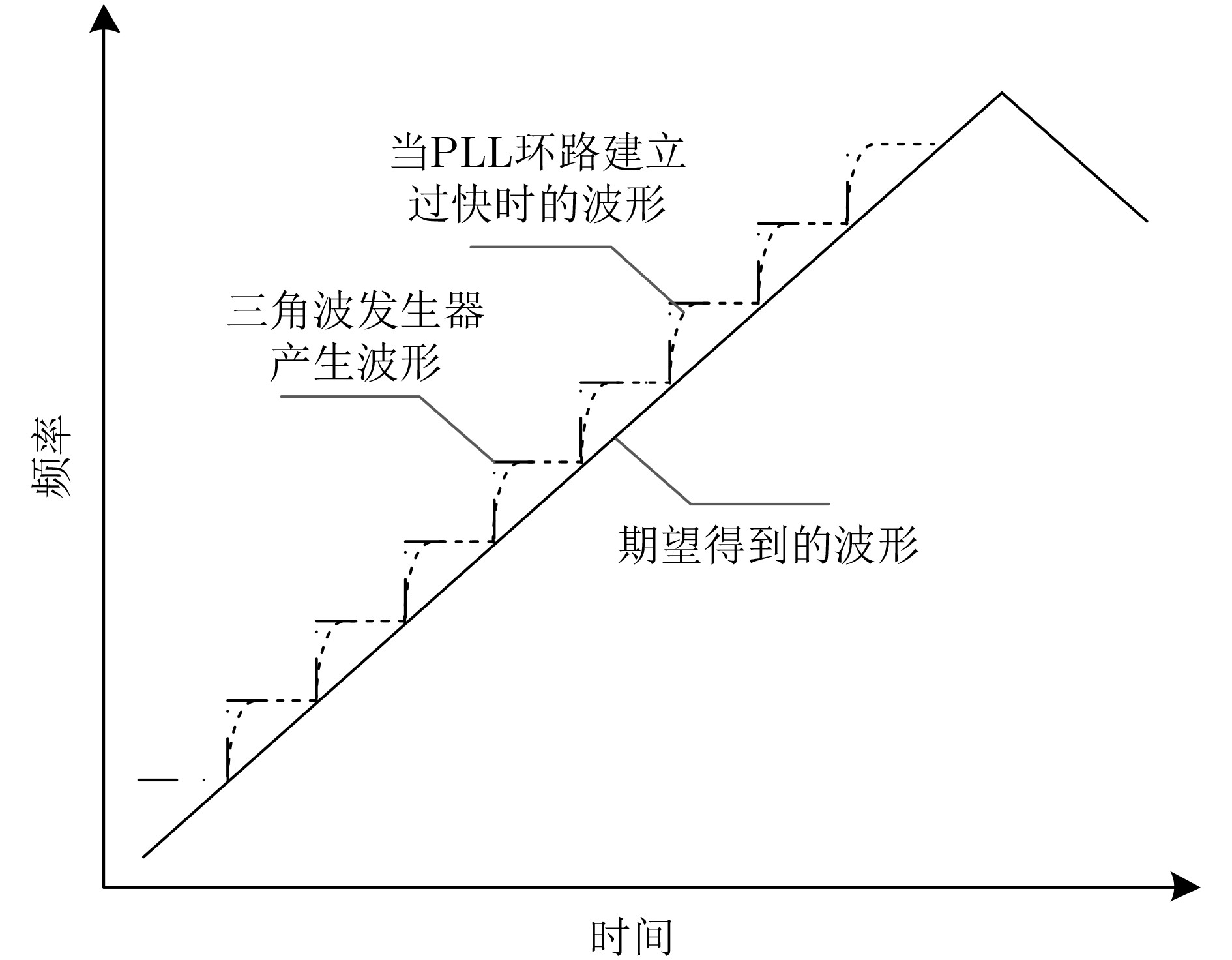
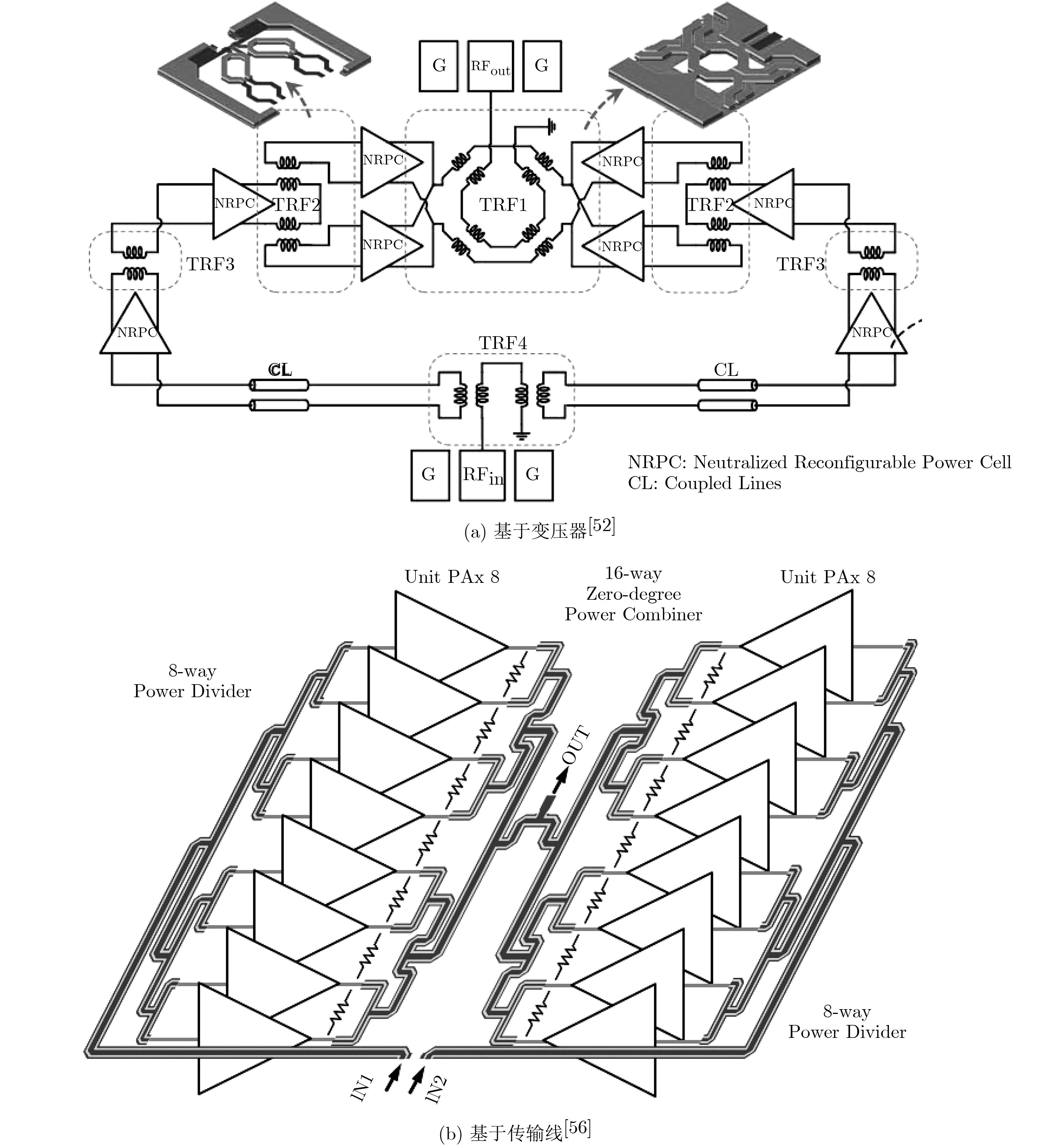
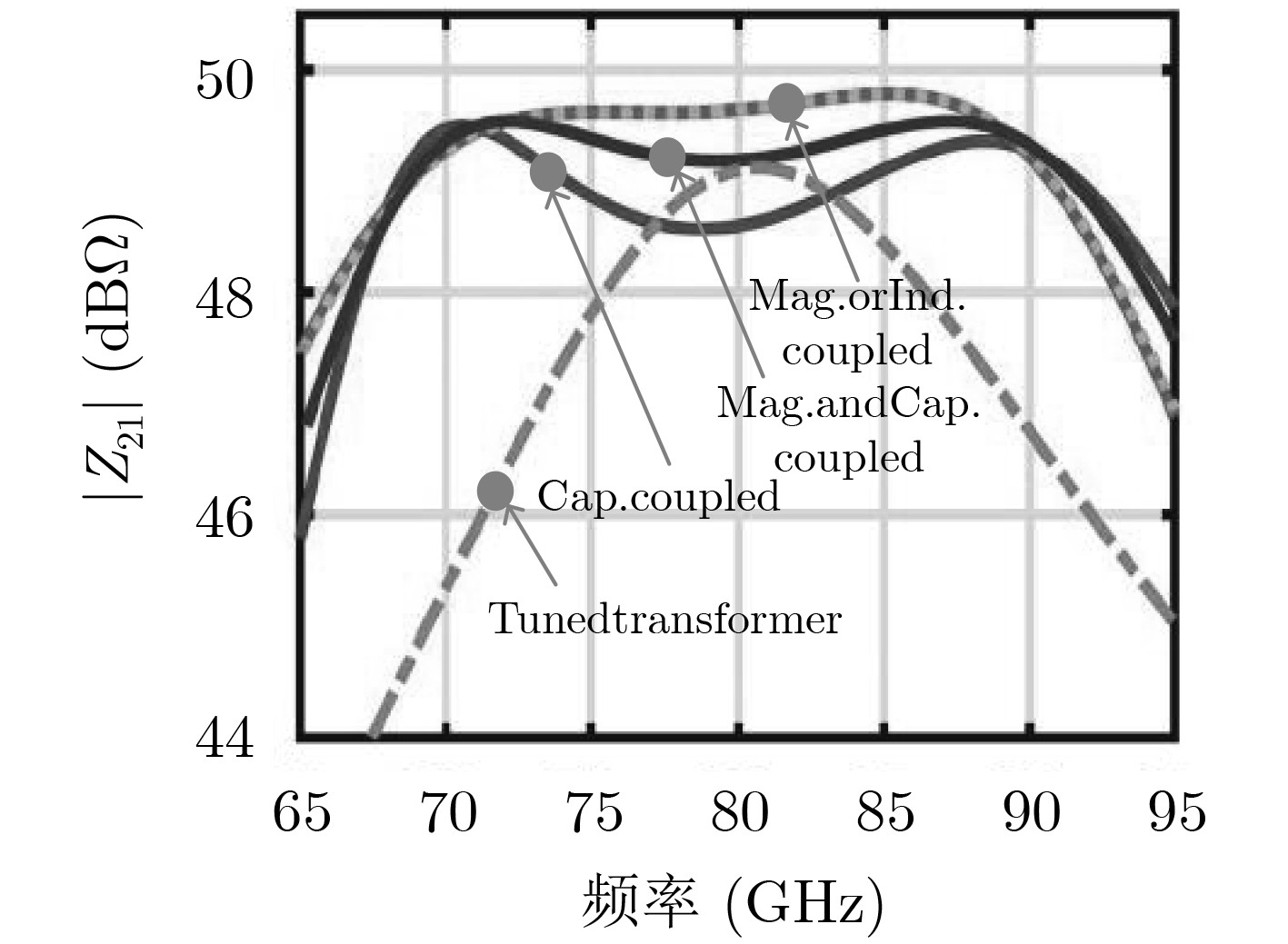
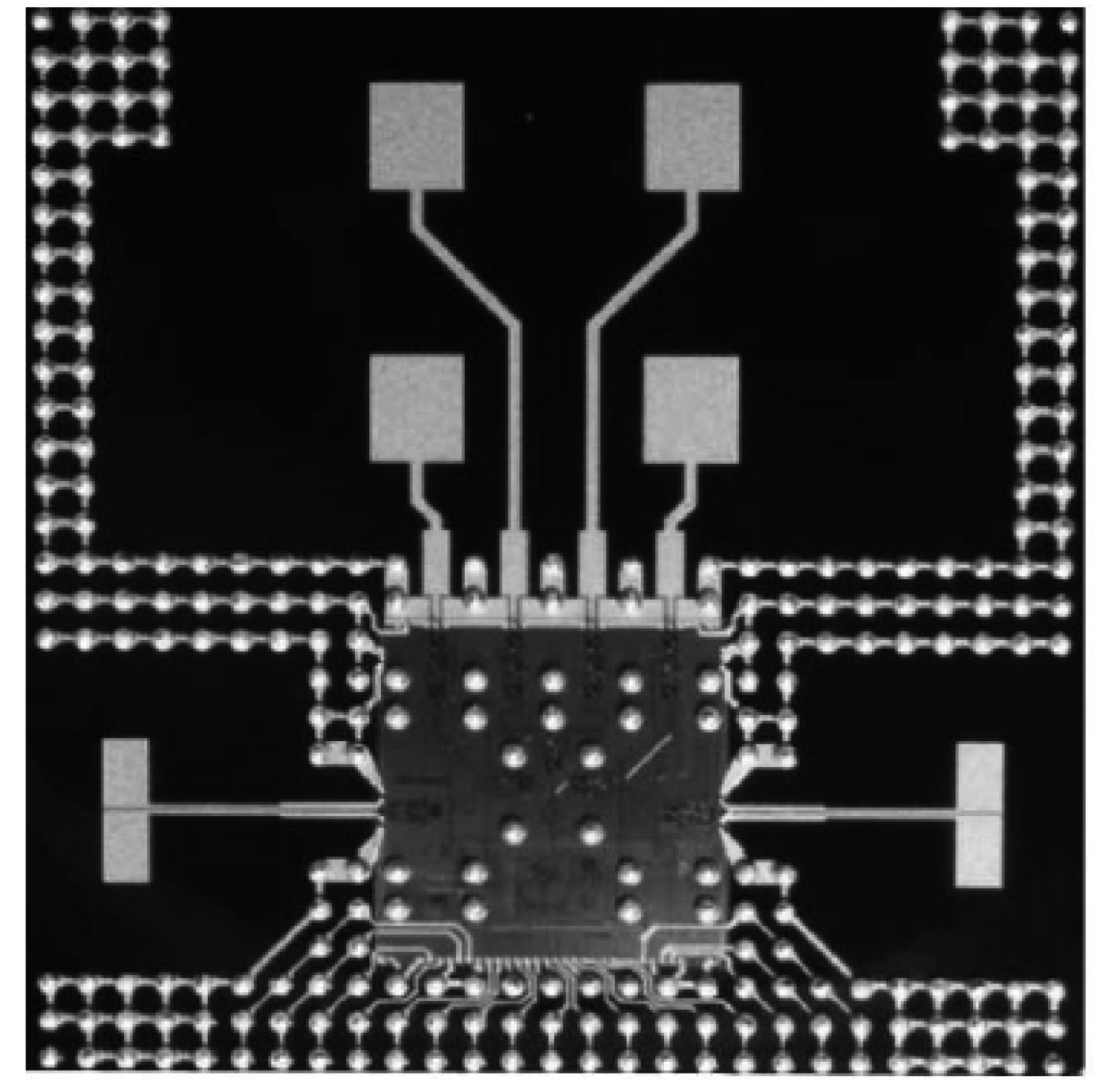
The millimeter wave radar is robust against various environments such as rain, fog, snow. It has huge potentials in applications such as automotive radars, intelligent robots. At the same time, the rapid development of silicon technology improves the cut off frequency of the transistor, which make it possible to implement low cost millimeter wave radar SoCs in silicon. Recently a lot of research is dedicated to improve the performance of the silicon based millimeter wave SoCs from both system level and key building blocks level. The current research status and future trends of the silicon based millimeter wave radar SoCs are reviewed in this paper.
Ground Penetrating Radar (GPR), as a non-destructive technology, has been widely used to detect, locate, and characterize subsurface objects. Example applications include underground utility mapping and bridge deck deterioration assessment. However, manually interpreting the GPR scans to detect buried objects and estimate their positions is time-consuming and labor-intensive. Hence, the automatic detection of targets is necessary for practical application. To this end, this paper discusses the feasibility of using GPR to estimate target positions, and reviews the progress made by domestic and international scholars on automatic hyperbolic signature detection in GPR scans. Thereafter, this paper summarizes and compares the processing methods for target detection. It is concluded that future research should focus on developing deep-learning based method to automatically detect and estimate subsurface features for on-site applications.
Pattern recognition algorithms can discover valuable information from mass data of biomedical images as guide for basic research and clinical application. In recent years, with improvement of the theory and practice of pattern recognition and machine learning, especially the appearance and application of deep learning, the crossing researches among artificial intelligence, pattern recognition, and biomedicine become a hotspot, and achieve many breakthrough successes in related fields. This review introduces briefly the common framework and algorithms of image pattern recognition, summarizes the applications of these algorithms to biomedical image analysis including fluorescence microscopic images, histopathological images, and medical radiological images, and finally analyzes and prospect several potential research directions.
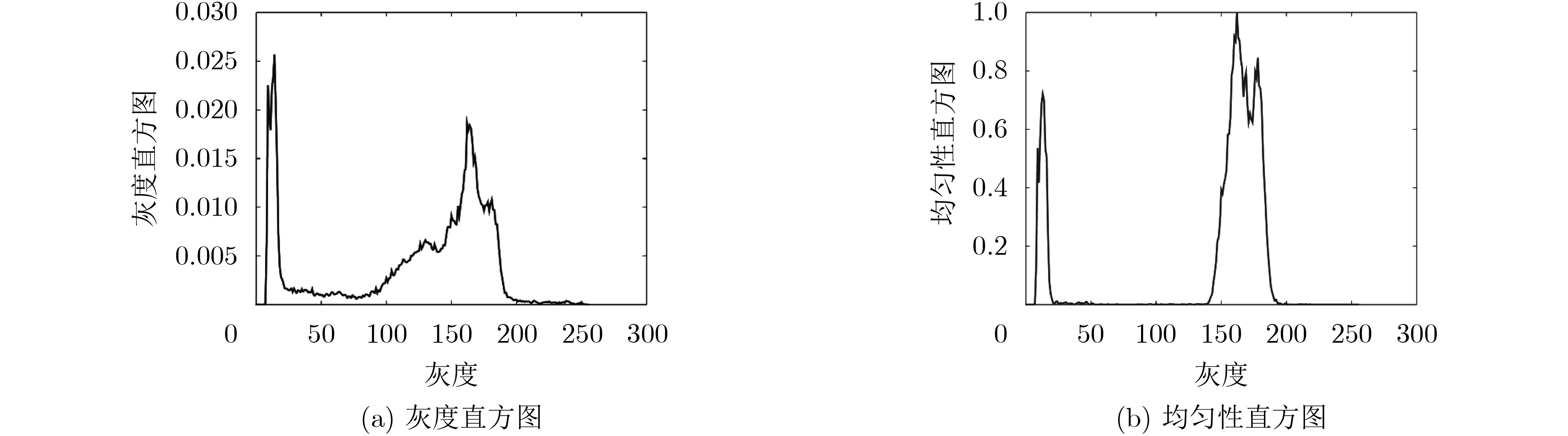
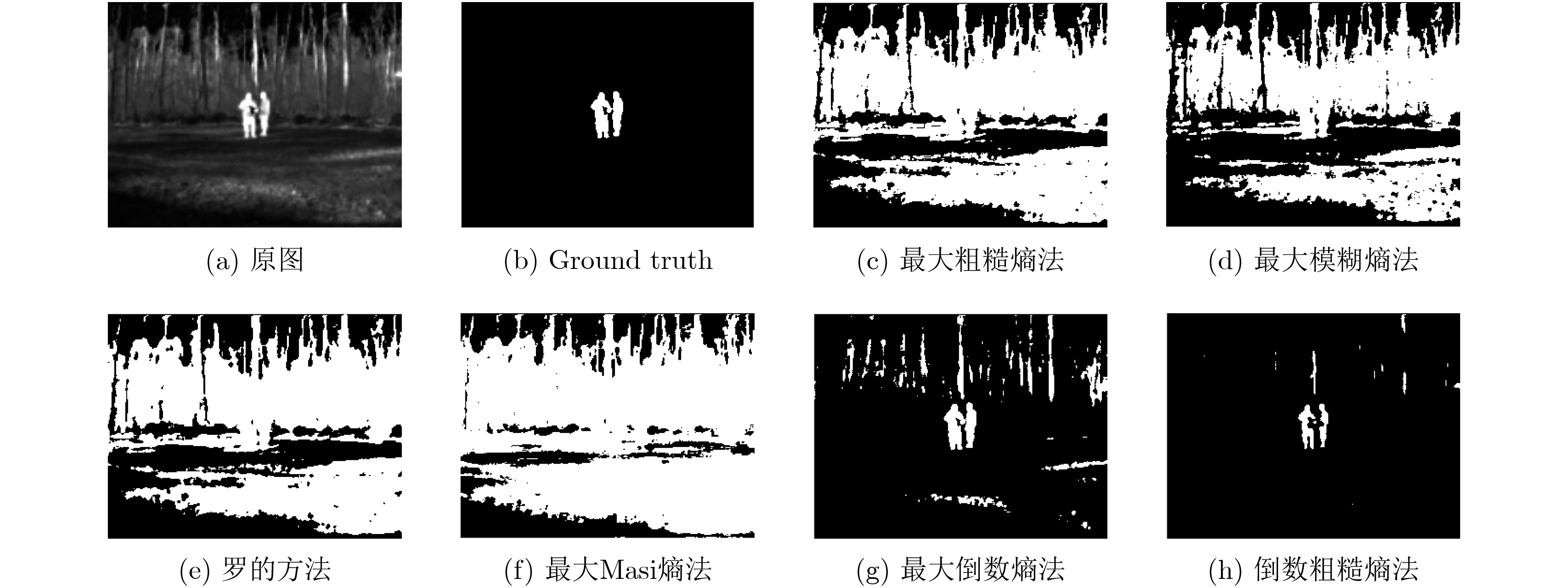
Image thresholding methods based on the rough entropy segment the images without prior information except the images. There are two problems to be considered in the rough entropy based thresholding methods, i.e., measuring the incompleteness of knowledge about an image and granulating the image. In this paper, reciprocal rough entropy, a new form of rough entropy, is defined to measure the incompleteness of the image information. In order to granulate the image effectively, a granule size selection method based on the homogeneity histogram is employed. The proposed reciprocal rough entropy is simple in expression and calculation. The experimental results verify the effectiveness of the proposed algorithm.
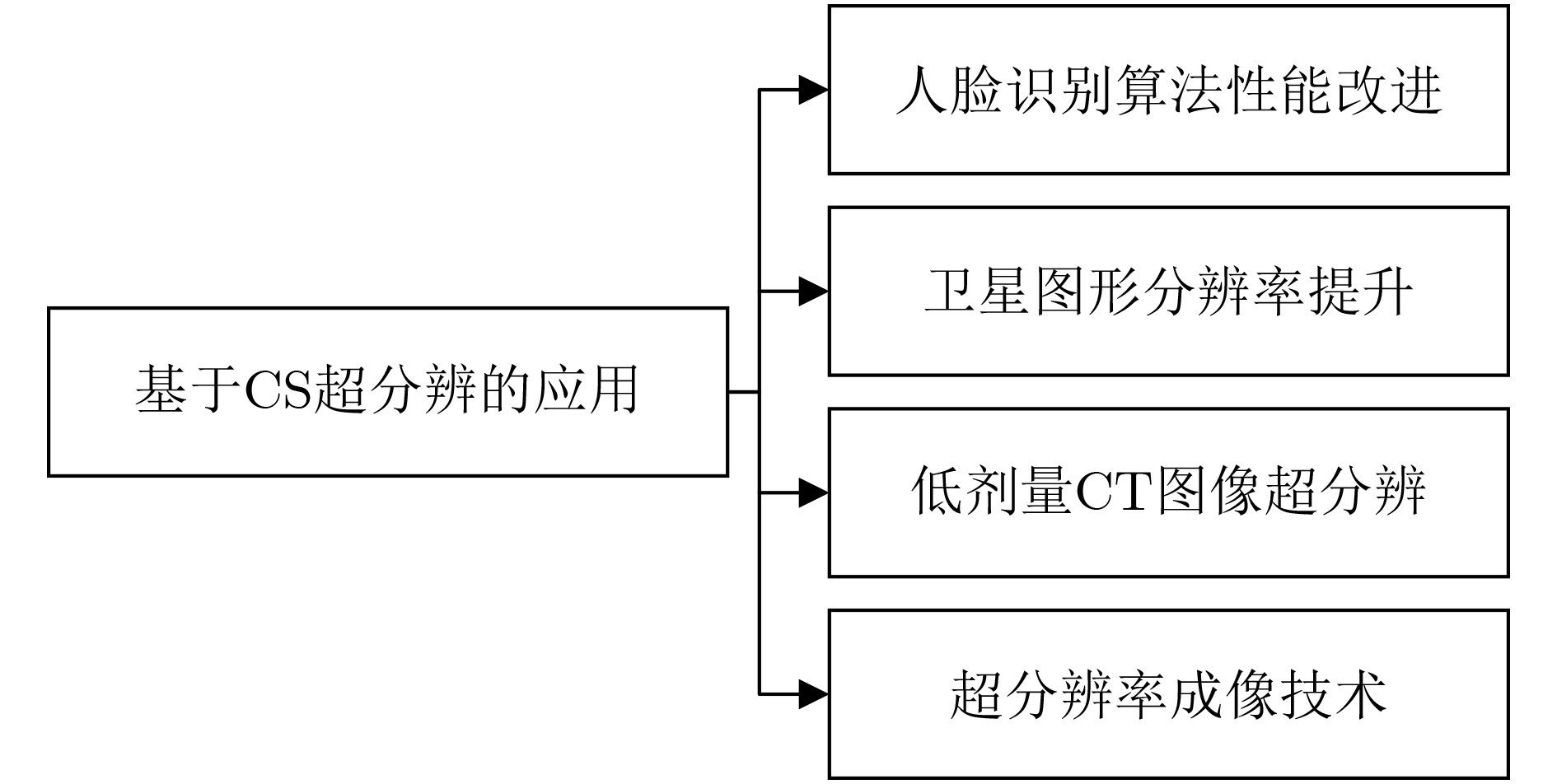
Compressed Sensing (CS) theory is one of the most active research fields in electronic information engineering. CS theory overcomes the limits dictated by Nyquist sampling theorem. Compared to the required minimum sampling quantity, CS proves that the original signal can be restored with high probability by fewer measurements, which saves the time cost of data acquisition and processing without losing information features. CS theory can essentially be regarded as a tool for dealing with linear signal recovery problems, so it has obvious advantages in solving inverse problems of signals and images. Image degradation is one of them, and the process of restoring high-quality images is image optimization. In order to promote the academic research and practical application of CS theory, the basic principle of CS is introduced. Based on the previous research, this paper studies on CS-based image optimization technology in three main aspects: denoising, deblurring and super resolution. Finally, the problems and challenges are discussed, and the current trends are analyzed to provide reference and help for future work.
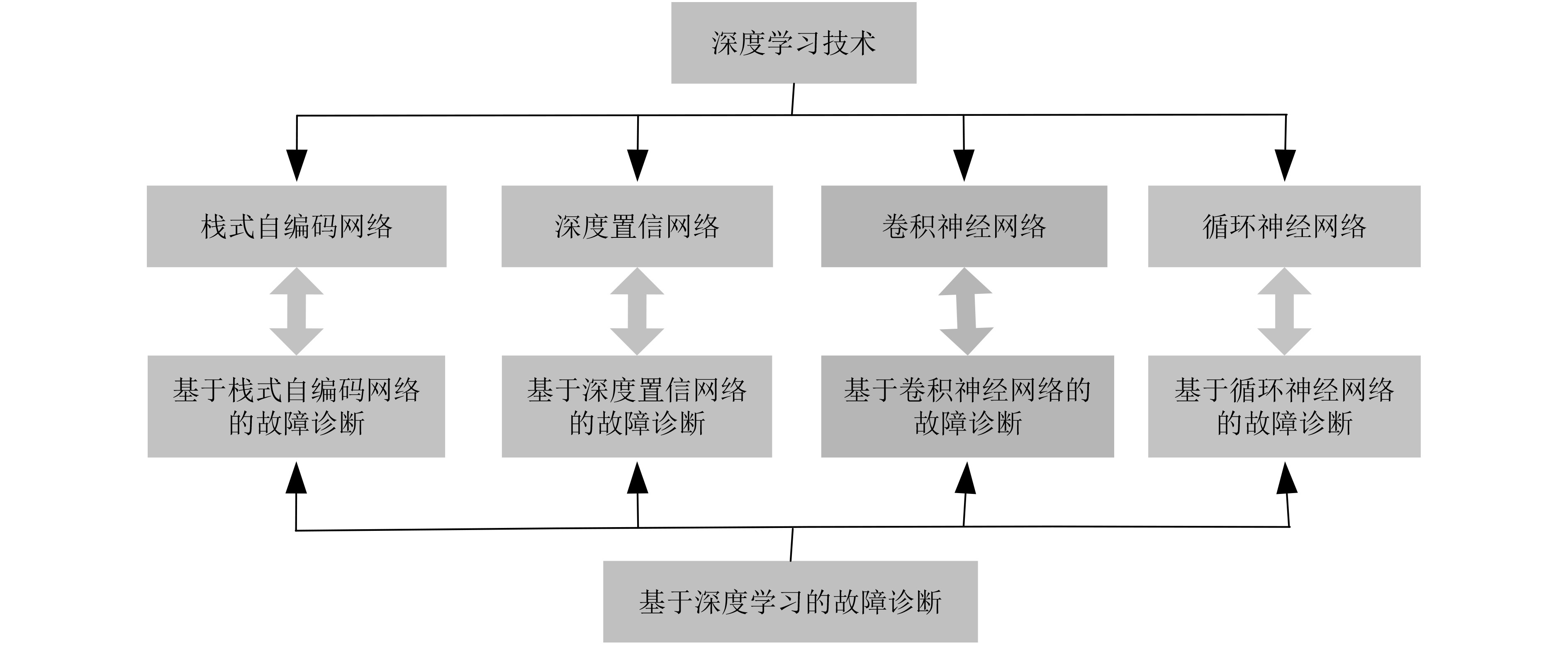
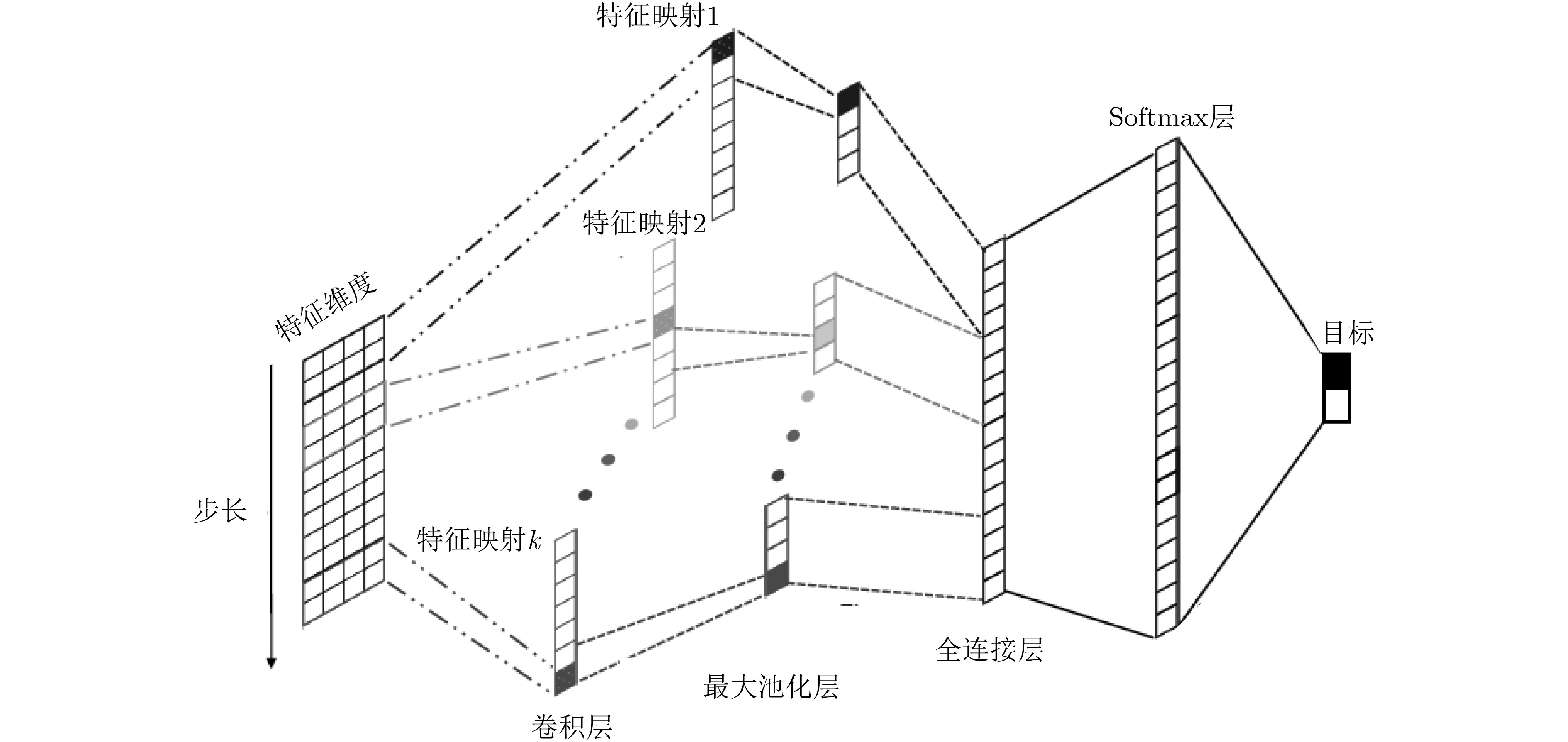
The massive high-dimensional measurements accumulated by distributed control systems bring great computational and modeling complexity to the traditional fault diagnosis algorithms, which fail to take advantage of the higher-order information for online estimation. In view of its powerful ability of representation learning, deep learning based fault diagnosis is extensively studied, both in academia and in industry, making intelligent process control more automated and effective. In this paper, deep learning based fault diagnosis is reviewed and summarized as four parts, i.e., stacked auto-encoder based fault diagnosis, deep belief network based fault diagnosis, convolutional neural network based fault diagnosis, and recurrent neural network based fault diagnosis. Furthermore, some necessity and potential trends, "integrated innovation", "data + knowledge" and "information fusion", are discussed from the view of data preprocessing, network design and decision.
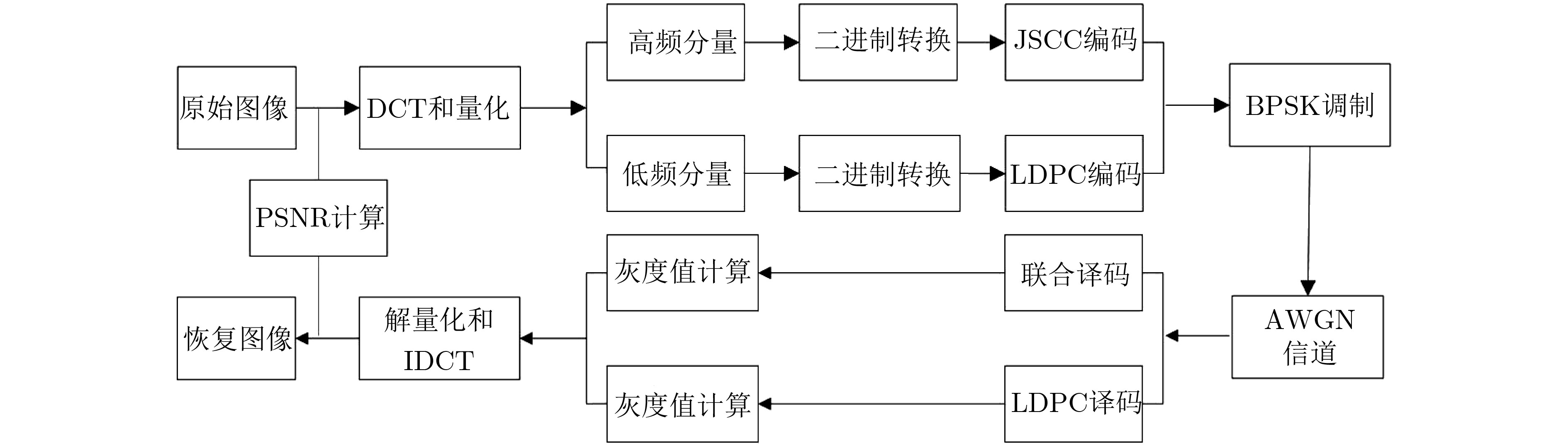
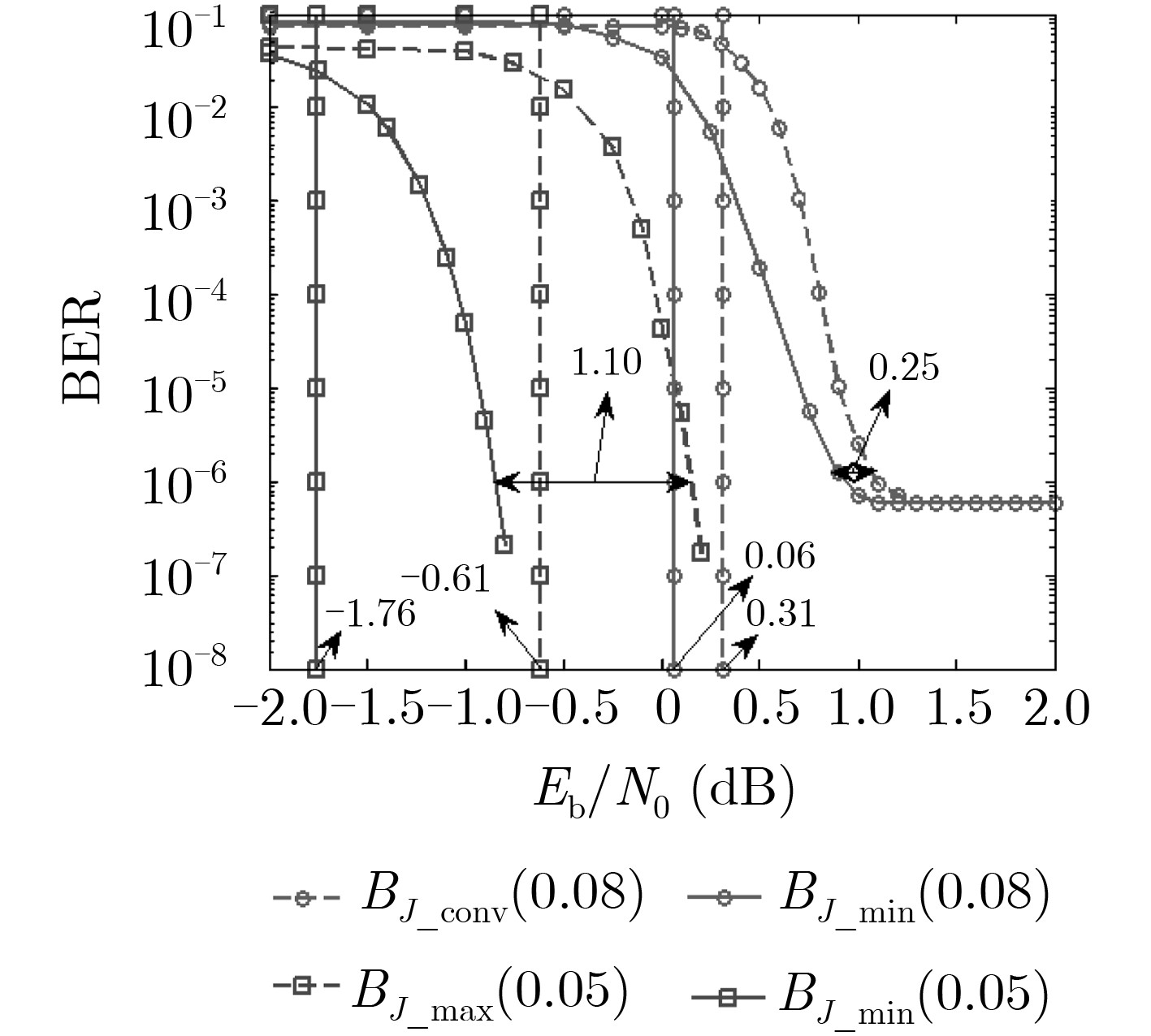
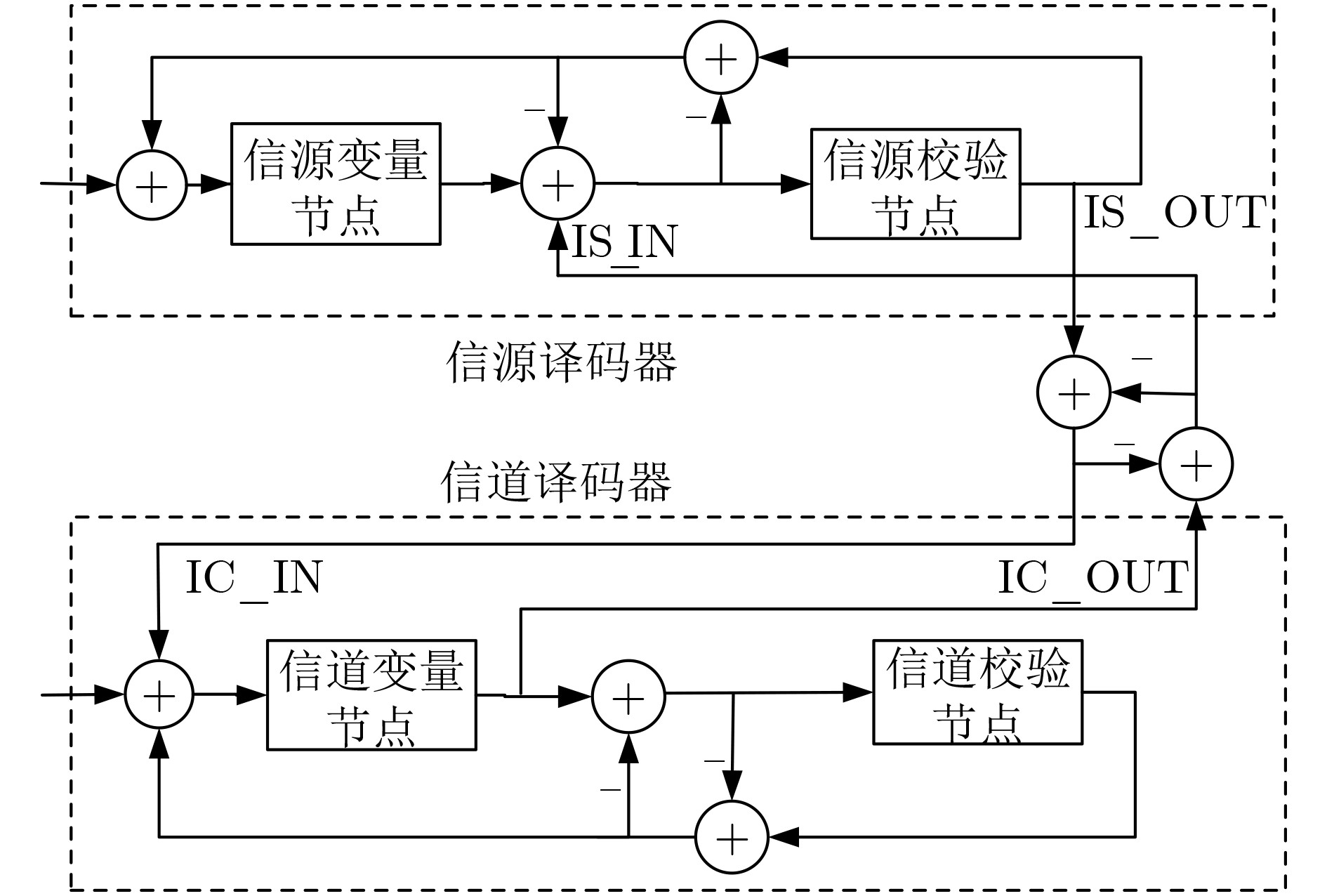
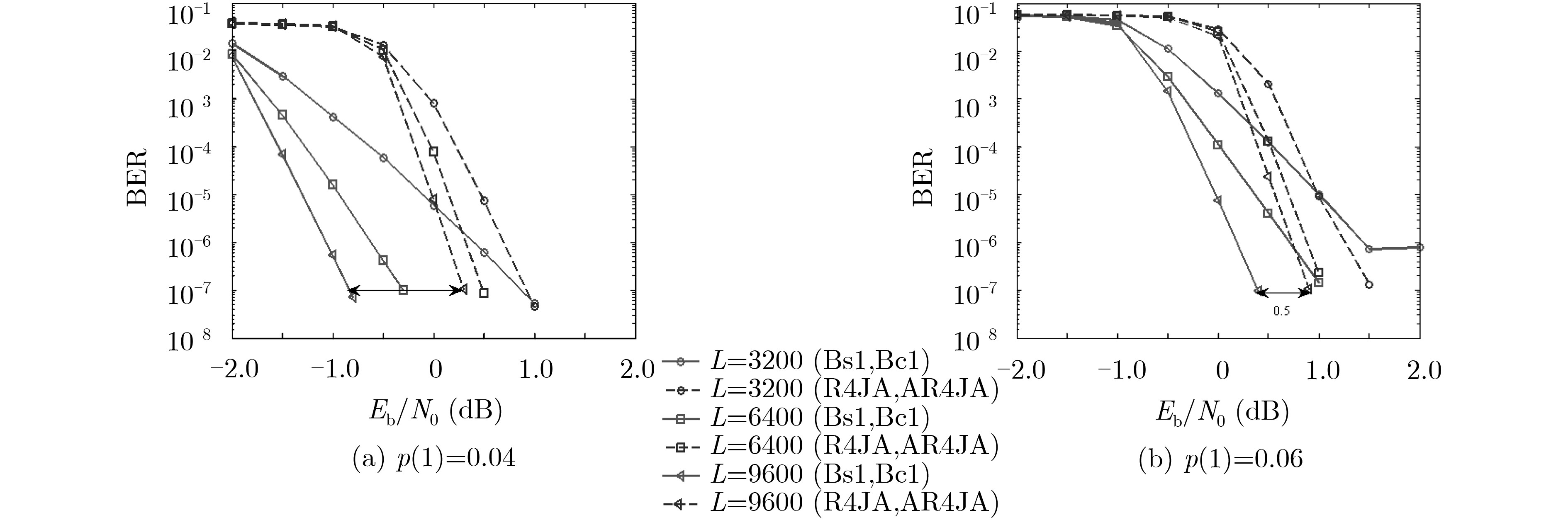
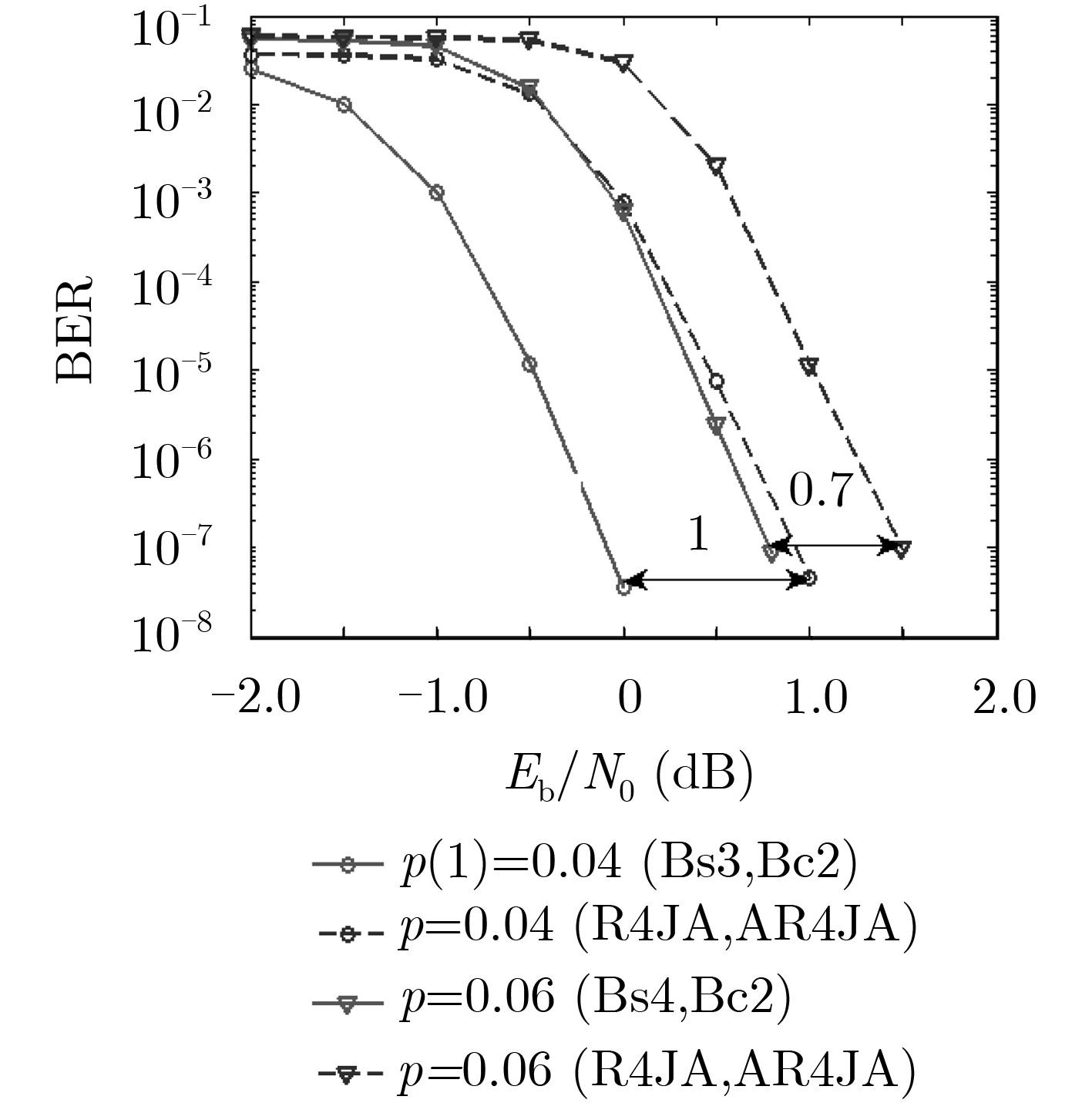
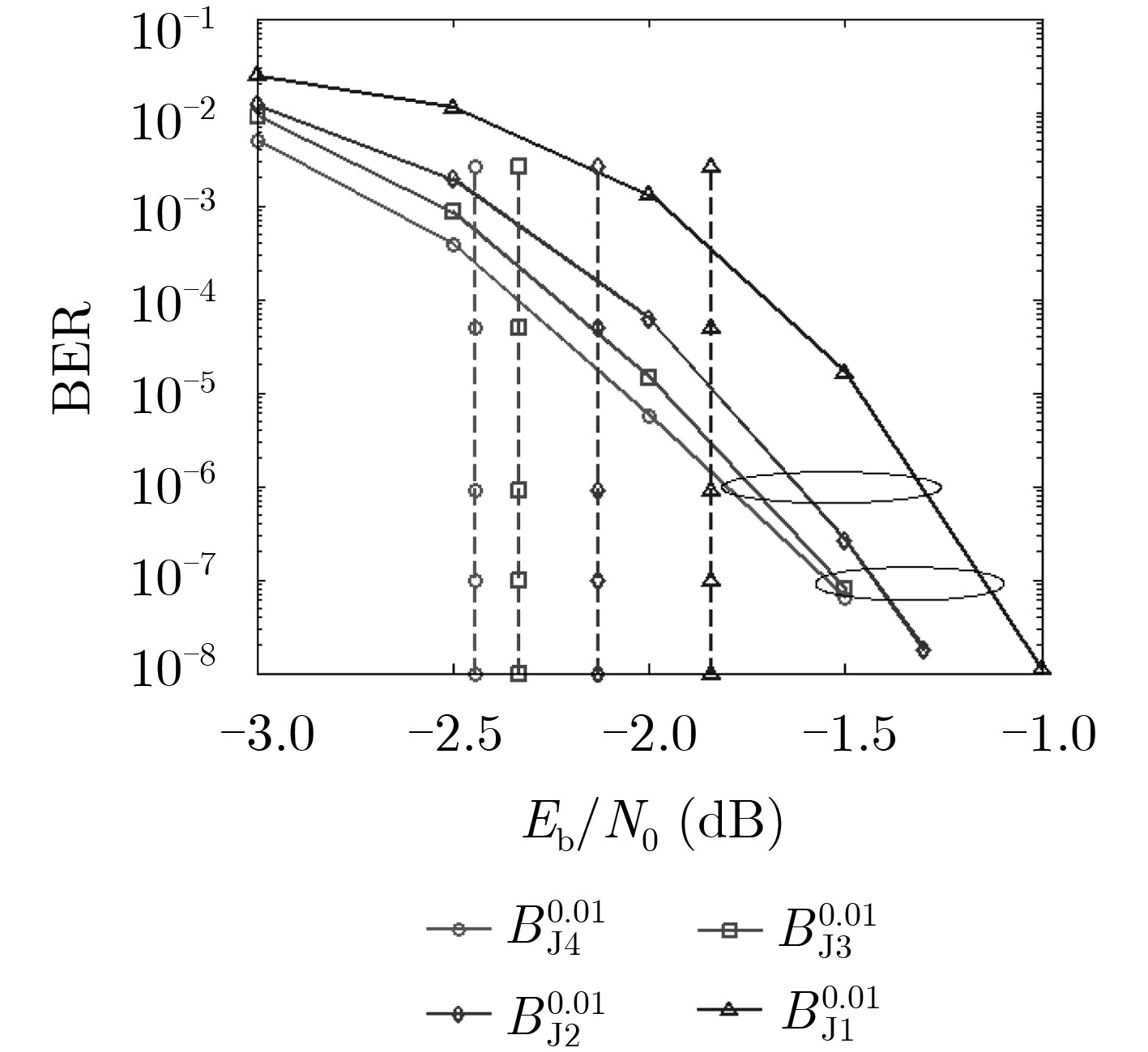
Protograph Low Density Parity Check (P-LDPC) code is widely used in various communication systems. In order to meet the requirements of error correction performance, hardware resource loss and power consumption in different application scenarios, further design optimization of P-LDPC codes is needed. This paper focuses on the properties of Joint Source-Channel Coding (JSCC) system based on Double P-LDPC (DP-LDPC) codes in standard channel environment, the optimization of code design and performance behavior, etc. The design and optimization for the system environment in recent years is summarized. It shows that the design optimization work has significantly improved the system performance, which provides some ideas for the research of Industrial Internet (II)-oriented LDPC code. Finally, the future research work is discussed for the reference and promotion of interested scholars.
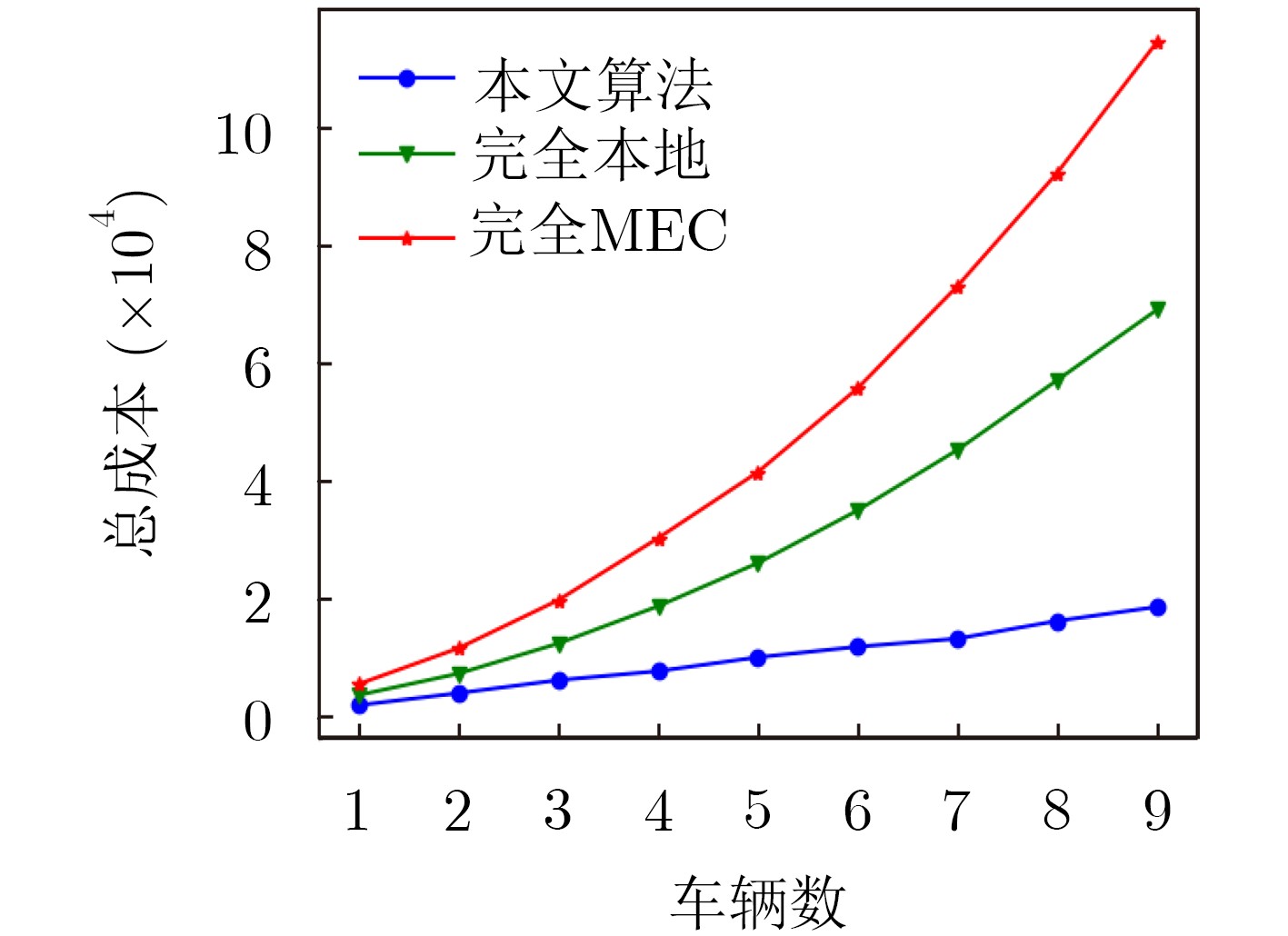
In order to reduce the delay of computing tasks and the total cost of the system, Mobile Eedge Computing (MEC) technology is applied to vehicular networks to improve further the service quality. The delay problem of vehicular networks is studied with the consideration of computing resources. In order to improve the performance of the next generation vehicular networks, a multi-platform offloading intelligent resource allocation algorithm is proposed to allocate the computing resources. In the proposed algorithm, the K-Nearest Neighbor (KNN) algorithm is used to select the offloading platform (i.e., cloud computing, mobile edge computing, local computing) for computing tasks. For the computing resource allocation problem and system complexity in non-local computing, reinforcement learning is used to solve the optimization problem of resource allocation in vehicular networks using the mobile edge computing technology. Simulation results demonstrate that compared with the baseline algorithms (i.e., all tasks offload to the local or MEC server), the proposed multi-platform offloading intelligent resource allocation algorithm achieves a significant reduction in latency cost, and the average system cost can be saved by 80%.
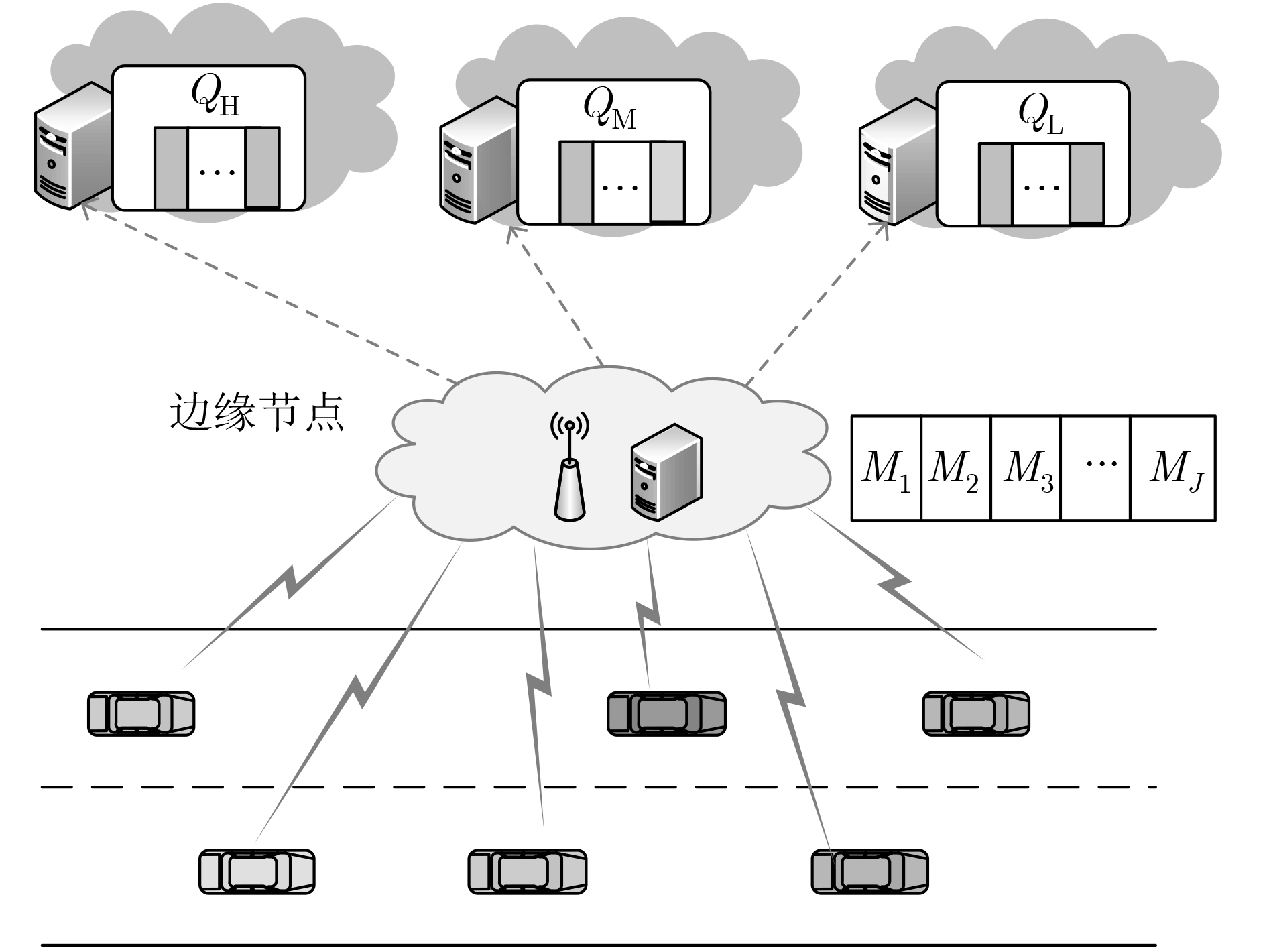
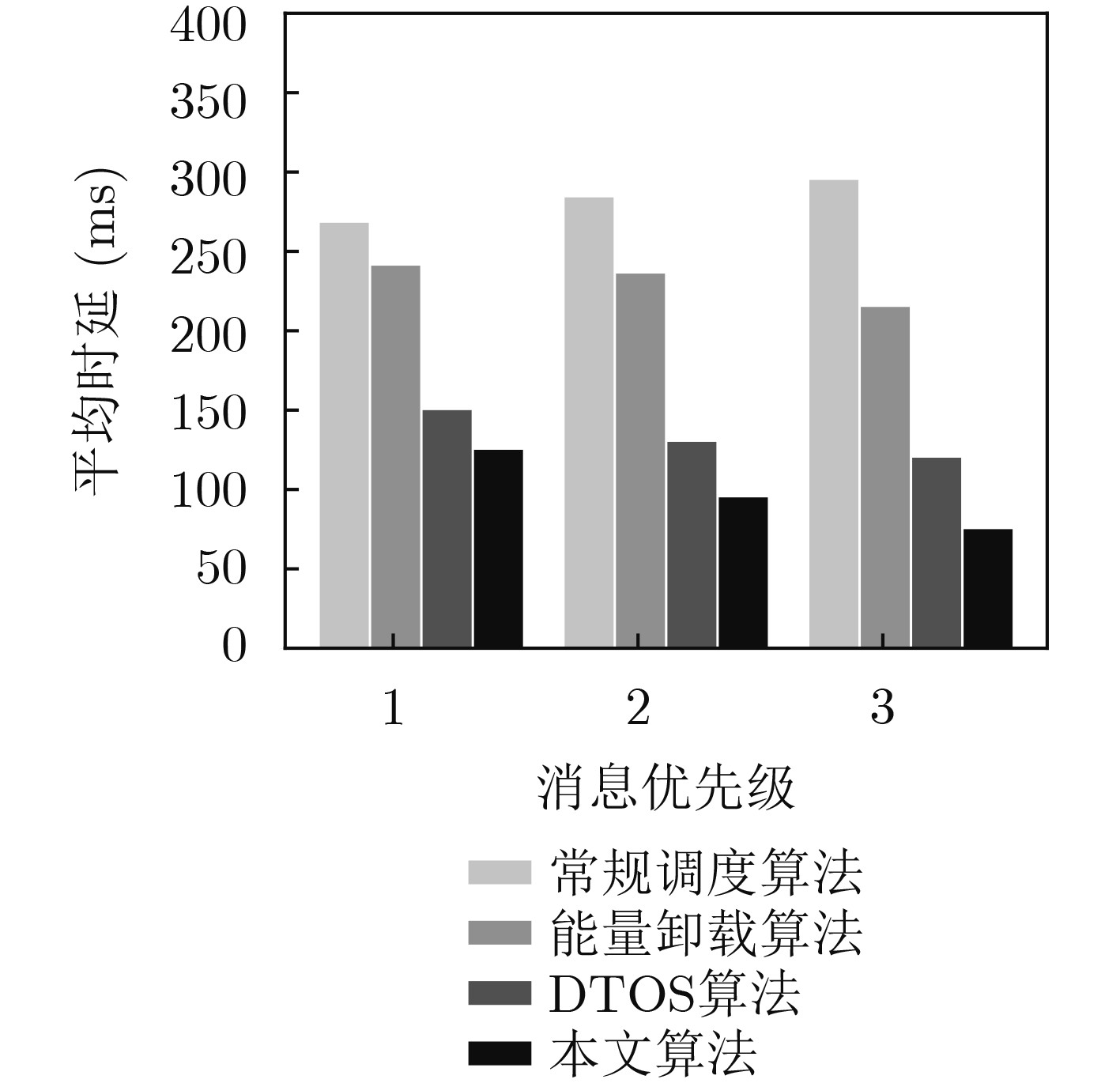
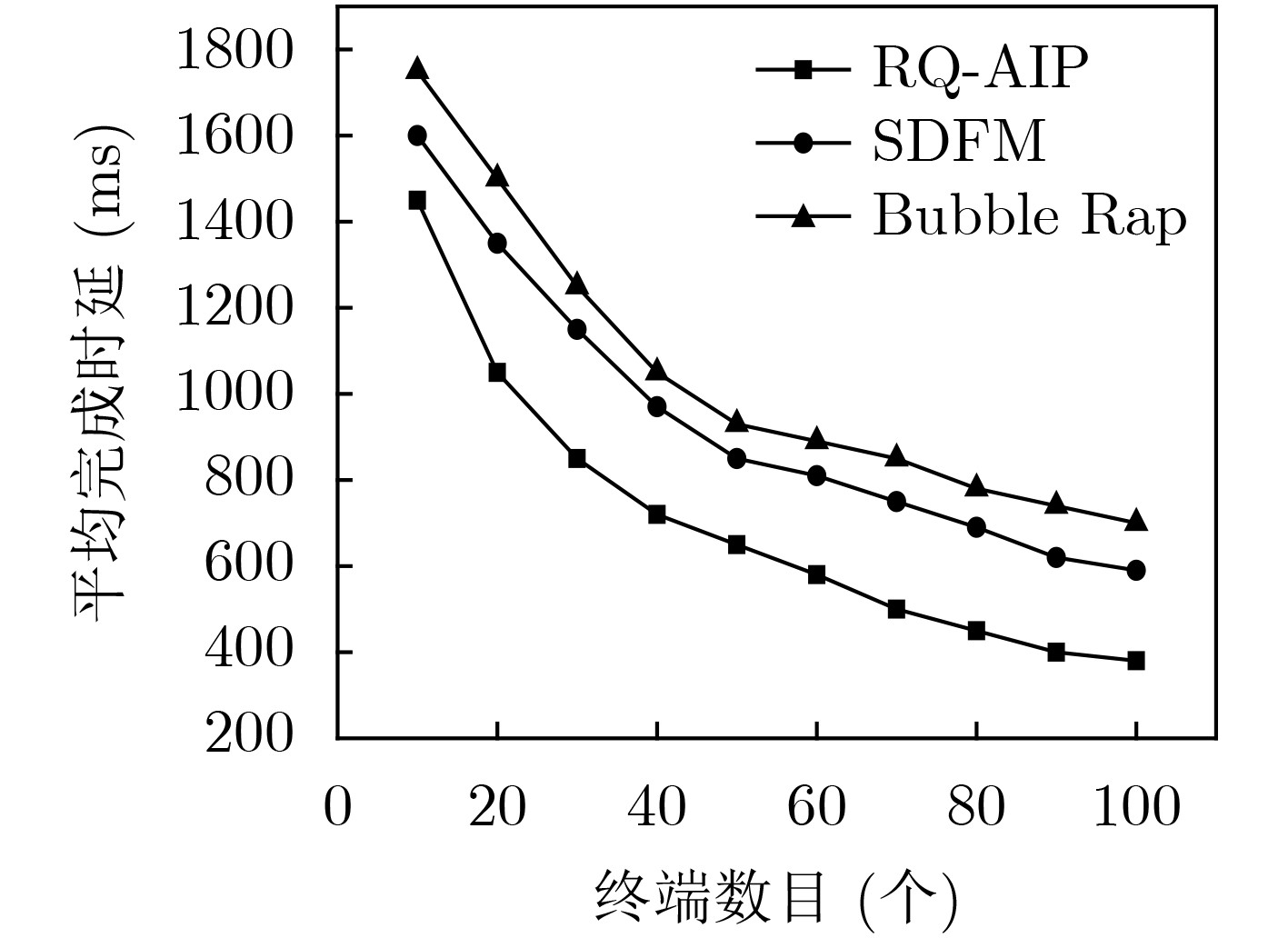
Unbalanced load on the edge computing server will seriously affect service capabilities, a task scheduling strategy Reinforced Q-learning-Automatic Intent Picking (RQ-AIP) for edge computing scenarios is proposed. Firstly, the load balance of the entire network is measured based on the load distribution of the server. By combining the reinforcement learning method, the appropriate edge server is matched for the task to meet the resource differentiation needs of sensor node tasks. Then, a mapping relationship between task delay and terminal transmit power is constructed to satisfy the constraints of the physical domain. Combining the social attributes of terminal, the appropriate relay terminal is continuously selected for the task to achieve the load balancing of network by terminal-assisted scheduling. Simulation results show that compared with other load balancing strategies, the proposed strategy can effectively alleviate the load between the edge servers and the traffic of the core network, reduce task processing latency.


