

Instantaneous Length Estimation of Ships through Wideband Composite Bistatic Radar
-
摘要: 舰船目标长度特征对舰船目标识别具有重要作用,该文提出一种基于宽带复合双基地雷达联合观测的舰船目标长度估计方法。该方法综合利用单/双基地雷达高分辨距离像(HRRPs)长度,结合双基地雷达-舰船之间的空间关系求解,实现了单次测量估计舰船目标的实际长度,并分析了各种误差因素和几何构型条件下的估计误差。典型场景动态仿真证明了所提方法的有效性,结果表明在高分辨距离像长度误差小于5%条件下,舰船目标长度估计误差小于5%,为舰船目标特征提取与识别提供了新思路。Abstract: The length feature plays an important role in the ship target identification. A new algorithm for ship length estimation based on the joint observation of wideband composite bistatic radar is presented, which utilize the mono-/bi-static High-Resolution Range Profiles (HRRPs) and the bistatic spatial geometry relation to estimate the actual length of the ship target with only one-time measurement. Then the estimation errors under different conditions and geometrical constructions are analyzed through Monte Carlo simulations. Finally, the proposed method is validated through typical scene simulation experiments. The results show that when the error of HRRP length is less than 5%, the estimation error of the actual ship length is less than 5%, which provides a new idea for feature extraction and identification of ship targets.
-
Key words:
- Bistatic radar /
- Ship /
- High-Resolution Range Profiles (HRRPs) /
- Length estimation
-
表 1 测量误差仿真参数设置
参数 取值 入射俯仰角(°) 45 接收俯仰角(°) 45 双基地角(°) 60 T/R站1维距离像长度(m) 70.7 R站1维距离像长度(m) 35.4 舰船目标长度(m) 100 入射俯仰角误差(°) 0~0.4 接收俯仰角误差 (°) 0~0.4 双基地角误差(°) 0~0.4 T/R站1维距离像长度误差 (m) 0~10 R站1维距离像长度误差(m) 0~10  下载: 导出CSV
下载: 导出CSV
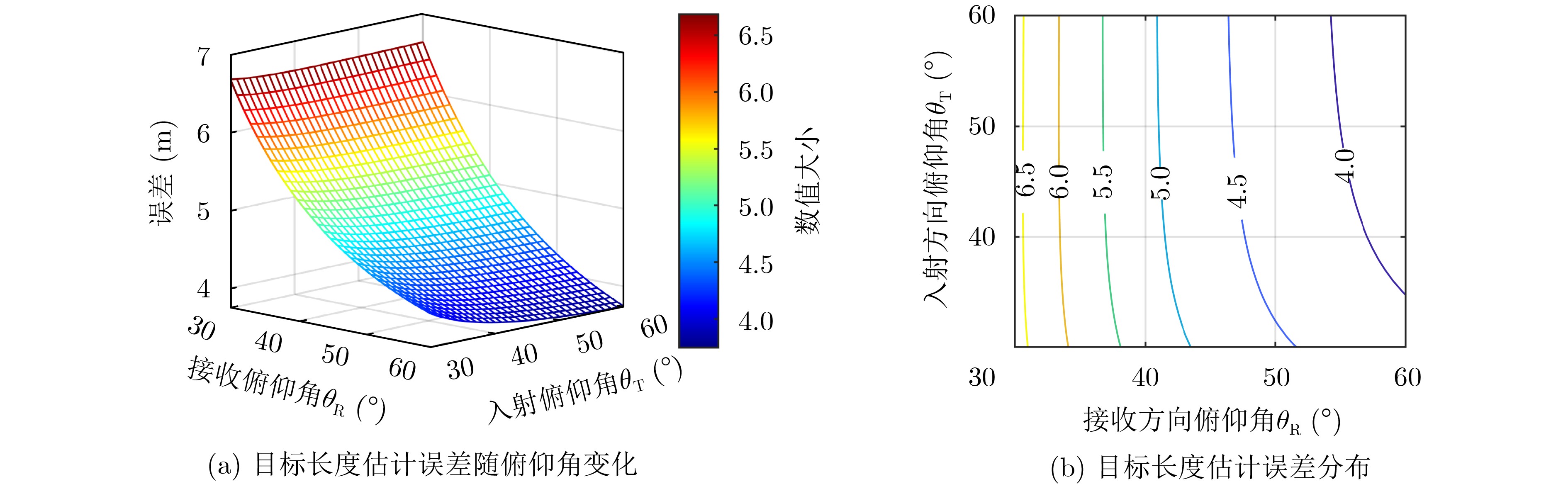
表 2 观测模型仿真参数设置
参数 取值 入射俯仰角(°) 0~90 接收俯仰角(°) 0~90 入射方位角(°) –45 接收方位角(°) 45 舰船目标长度(m) 100 入射俯仰角误差(°) 0.2 接收俯仰角误差 (°) 0.2 双基地角误差(°) 0.2 T/R站1维距离像长度误差 (m) 1 R站1维距离像长度误差(m) 1
下载: 导出CSV
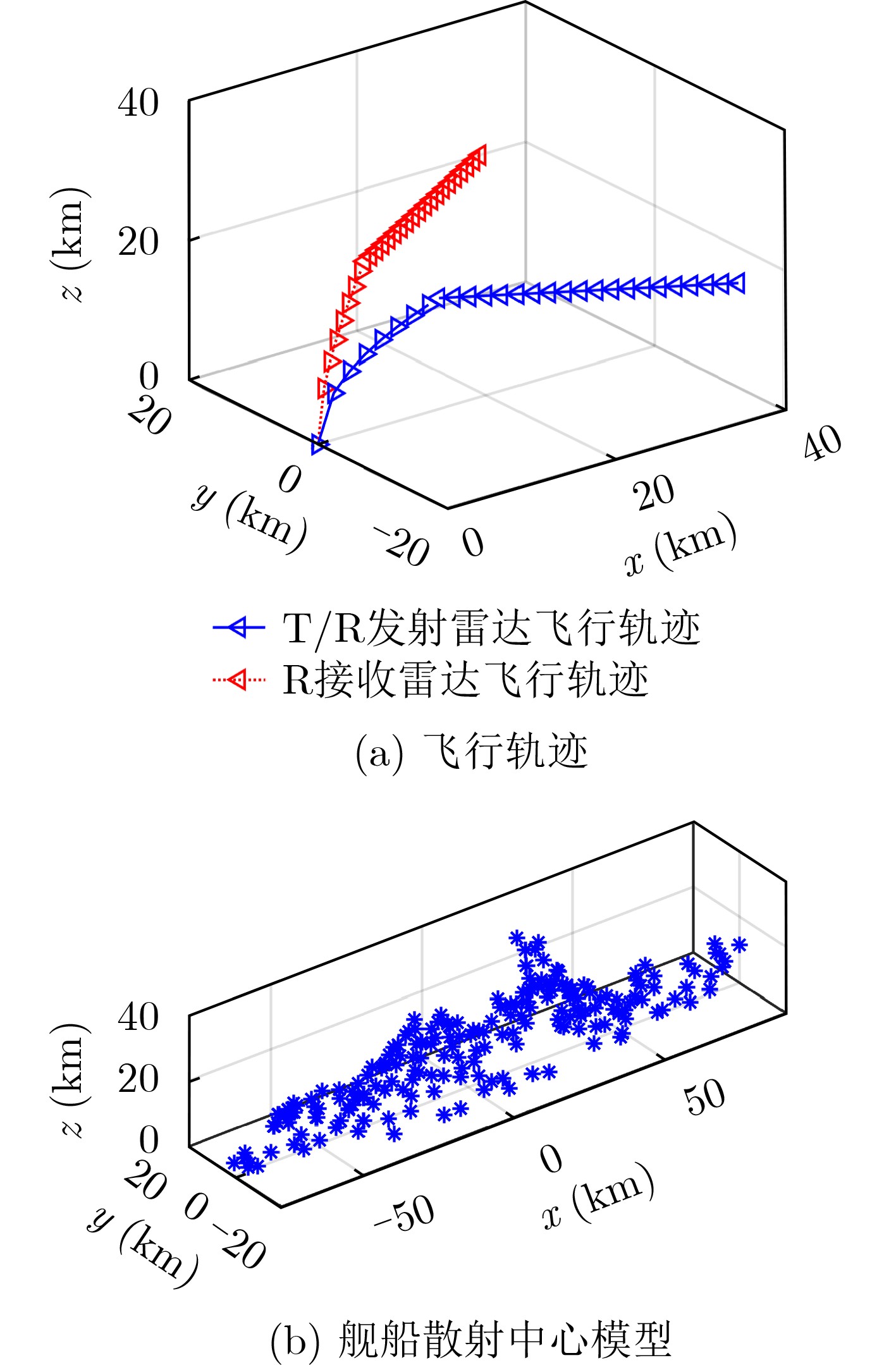
表 4 仿真参数设置
参数 T/R站 R站 初始位置(km) $ \left[ {20\sqrt 3 , - 20,20} \right] $ $ \left[ {20\sqrt 3 ,20,20} \right] $ 结束位置(km) $ \left[5\sqrt{3},-5,20\right] $ $ \left[ {5\sqrt 3 ,5,20} \right] $ 速度(km/h) 900 900 时间(s) 120 120
下载: 导出CSV
-
[1] 关键, 姜星宇, 刘宁波, 等. 海杂波中目标分数域谱范数特征检测方法[J/OL]. 电子与信息学报. https://jeit.ac.cn/cn/article/doi/10.11999/JEIT220667, 2023.GUAN Jian, JIANG Xingyu, LIU Ningbo, et al. Spectral norm feature detection method in FrFT domain of targets in sea clutter[J/OL]. Journal of Electronics & Information Technology. https://jeit.ac.cn/cn/article/doi/10.11999/JEIT220667, 2023. [2] 魏存伟, 段发阶, 刘先康. 基于宽带雷达HRRP舰船目标长度估计算法[J]. 系统工程与电子技术, 2018, 40(9): 1960–1965. doi: 10.3969/j.issn.1001-506X.2018.09.10.WEI Cunwei, DUAN Fajie, and LIU Xiankang. Length estimation method of ship target based on wide-band radar's HRRP[J]. Systems Engineering and Electronics, 2018, 40(9): 1960–1965. doi: 10.3969/j.issn.1001-506X.2018.09.10. [3] QI Xiaoyu, XU Runtian, LI Yanfang, et al. A method for estimating true length of targets based on track information and wideband high-resolution range profile[C]. 2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Xi'an, China, 2021: 178–184. [4] 李璐, 杜兰, 何浩男, 等. 基于深度森林的多级特征融合SAR目标识别[J]. 电子与信息学报, 2021, 43(3): 606–614. doi: 10.11999/JEIT200685.LI Lu, DU Lan, HE Haonan, et al. Multi-level feature fusion SAR automatic target recognition based on deep forest[J]. Journal of Electronics &Information Technology, 2021, 43(3): 606–614. doi: 10.11999/JEIT200685. [5] GU Dandan and XU Xiaojian. Multi-feature extraction of ships from SAR images[C]. 6th International Congress on Image and Signal Processing (CISP), Hangzhou, China, 2013: 454–458. [6] HU Guangli, XU Cheng, LI Chengcheng, et al. Geometrical features extraction for ship target based on SAR images[C]. 2014 7th International Congress on Image and Signal Processing, Dalian, China, 2014: 788–792. [7] STASOLLA M and GREIDANUS H. The exploitation of Sentinel-1 images for vessel size estimation[J]. Remote Sensing Letters, 2016, 7(12): 1219–1228. doi: 10.1080/2150704X.2016.1226522. [8] LI Boying, LIU Bin, GUO Weiwei, et al. Ship size extraction for Sentinel-1 images based on dual-polarization fusion and nonlinear regression: Push error under one pixel[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(8): 4887–4905. doi: 10.1109/TGRS.2018.2841882. [9] REN Yibin, LI Xiaofeng, and XU Huan. A deep learning model to extract ship size from sentinel-1 SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1–14. doi: 10.1109/TGRS.2021.3063216. [10] PASTINA D, BUCCIARELLI M, and LOMBARDO P. Multistatic and MIMO distributed ISAR for enhanced cross-range resolution of rotating targets[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(8): 3300–3317. doi: 10.1109/TGRS.2010.2043740. [11] ZHANG Min, ZHAO Yanwei, ZHAO Ye, et al. A bistatic synthetic aperture radar imagery simulation of maritime scene using the extended nonlinear chirp scaling algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(3): 2046–2054. doi: 10.1109/TAES.2013.6558038. [12] ZHANG Junqiu and WANG Yong. A three-dimensional imaging method of ship target via multistatic distributed InISAR[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 1–5. doi: 10.1109/LGRS.2022.3195362. [13] QIAN Guangzhao and WANG Yong. Monostatic-equivalent algorithm via Taylor expansion for BiSAR ship target imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 1–19. doi: 10.1109/TGRS.2022.3233384. [14] LI Zhongyu, ZHANG Xiaodong, YANG Qing, et al. Hybrid SAR-ISAR image formation via joint FrFT-WVD processing for BFSAR ship target high-resolution imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1–13. doi: 10.1109/TGRS.2021.3117280. [15] AI Xiaofeng, HUANG Yan, ZHAO Feng, et al. Imaging of spinning targets via narrow-band T/R-R bistatic radars[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(2): 362–366. doi: 10.1109/LGRS.2012.2205893. [16] YU Lianqing, LI Yun, and YANG Yuhao. Method of aerial target length extraction based on high resolution range profile[C]. 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 2019: 1–5. -




图(9) / 表(6)
计量
- 文章访问数: 674
- HTML全文浏览量: 419
- PDF下载量: 50
- 被引次数: 0
 下载:
下载:
