

Robust Adaptive Beamforming Based on Covariance Matrix Reconstruction with Uncertainties
-
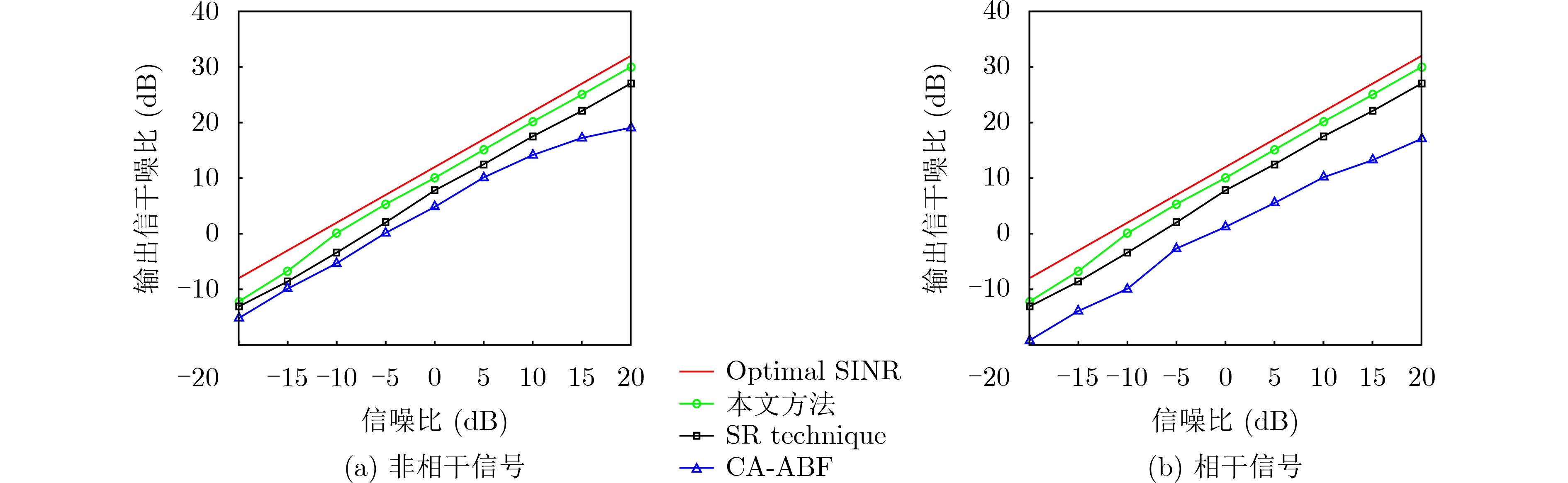
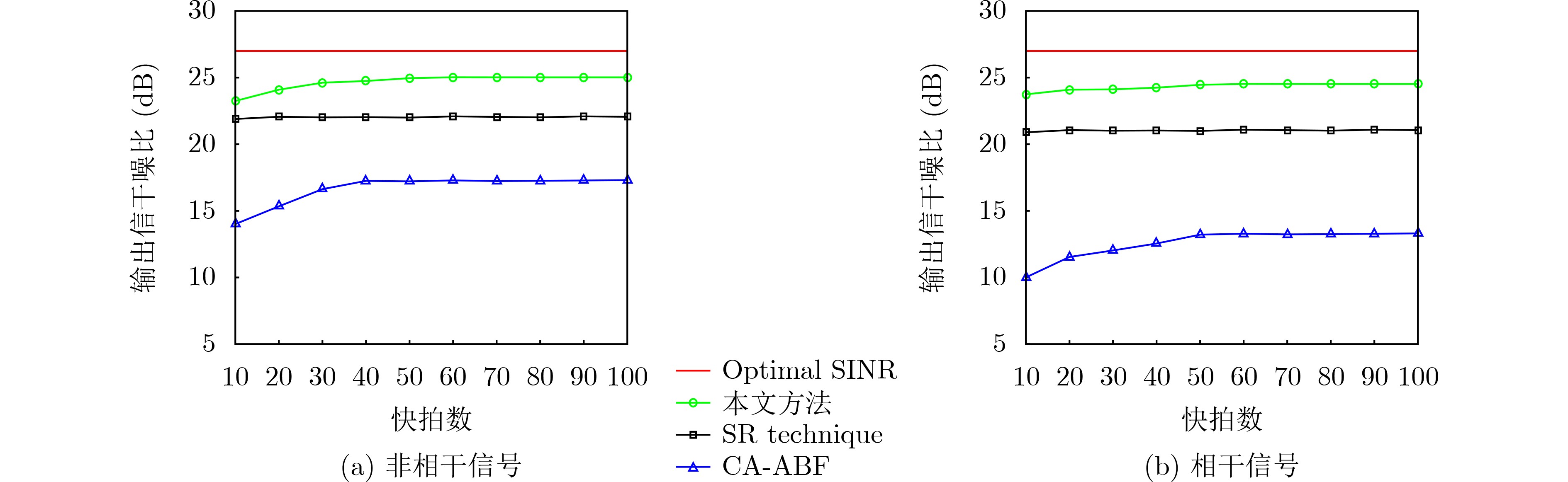
摘要: 针对有幅相误差的互质阵列,提出了一种基于协方差矩阵重构的鲁棒自适应波束形成方法。该方法的主要思想是重构信号的协方差矩阵。如果幅相误差存在且无法被忽视,协方差矩阵重构的精度会受到幅相误差的影响。为了消除幅相误差的影响,准确地重构信号的协方差矩阵,提出了一种基于最小二乘(TLS)的方法。首先,建立了含有幅相误差的协方差矩阵重构的基本模型。然后,将问题转化为变量误差(EIV)模型。再将幅相误差的校准转换为与幅相误差相关的误差矩阵的估计,再利用估计结果得到信号协方差矩阵的有效估计。为了解决误差矩阵估计问题,提出了一种交替下降算法。仿真结果表明,即使在存在幅相误差的情况下,该方法仍能提高协方差矩阵的重建精度,并且自适应波束的性能优于现有算法。Abstract: A robust adaptive beamforming method based on covariance matrix reconstruction for a coprime array with gain/phase uncertainties is proposed. The main idea of this method is to reconstruct the covariance matrix of the signals. However, the accuracy of the reconstruction of the covariance matrix might be influenced by the gain/phase uncertainties . To eliminate the influence of the gain/phase uncertainties and reconstruct accurately the covariance matrix of the signals, a Total Least Squares (TLS) based method is proposed. First, the basic model of the covariance matrix reconstruction with gain/phase uncertainties is established. Then, the problem is converted into an Errors In Variables (EIV) model. The calibration of the gain/phase uncertainties is then converted into the estimation of an error matrix related to the gain/phase uncertainties. An alternating descent algorithm is developed to solve this problem. Simulation results showed that the proposed method can improve the accuracy of the reconstruction of the covariance matrix and is effective for adaptive beamforming.
-
Key words:
- Adaptive beamforming /
- Compressed sensing /
- Gain/phase uncertainties /
- Coprime array
-
[1] VAIDYANATHAN P P and PAL P. System identification with sparse coprime sensing[J]. IEEE Signal Processing Letters, 2010, 17(10): 823–826. doi: 10.1109/LSP.2010.2060331 [2] GU Yujie, ZHOU Chengwei, GOODMAN N A, et al. Coprime Array adaptive beamforming based on compressive sensing virtual array signal[C]. Proceedings of 2016 IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 2016: 2981–2985. [3] DONOHO D L. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289–1306. doi: 10.1109/TIT.2006.871582 [4] 孟振. 天线阵列稳健自适应波束形成算法研究[D]. [博士论文], 哈尔滨工程大学, 2020.MENG Zhen. Study on The method of robust adaptive beamforming in antennas array[D]. [Ph. D. dissertation], Harbin Engineering University, 2020. [5] ZHANG Kun, SHEN Chong, LI Hanwen, et al. Direction of arrival estimation and robust adaptive beamforming with unfolded augmented coprime array[J]. IEEE Access, 2020, 8: 22314–22323. doi: 10.1109/ACCESS.2020.2968956 [6] MENG Zhen and ZHOU Weidong. Robust adaptive beamforming for coprime array with steering vector estimation and covariance matrix reconstruction[J]. IET Communications, 2020, 14(16): 2749–2758. doi: 10.1049/iet-com.2019.1314 [7] 刘春波, 陈伯孝, 陈多芳, 等. 双基地高频地波SIAR通道幅相误差的自校准方法[J]. 电子与信息学报, 2009, 31(3): 614–618. doi: 10.3724/SP.J.1146.2007.01659LIU Chunbo, CHEN Baixiao, CHEN Duofang, et al. Self-calibration of channel errors for bistatic HF surface wave SIAR[J]. Journal of Electronics &Information Technology, 2009, 31(3): 614–618. doi: 10.3724/SP.J.1146.2007.01659 [8] FRIEDLANDER B and WEISS A J. Eigenstructure methods for direction finding with sensor gain and phase uncertainties[C]. Proceedings of International Conference on Acoustics, Speech, and Signal Processing, New York, USA, 1988: 2681–2684. [9] HU Bin, WU Xiaochuan, ZHANG Xin, et al. DOA estimation based on compressed sensing with gain/phase uncertainties[J]. IET Radar, Sonar & Navigation, 2018, 12(11): 1346–1352. doi: 10.1049/iet-rsn.2018.5087 [10] 胡斌. 基于压缩感知的稀疏阵列DOA估计关键技术研究[D]. [博士论文], 哈尔滨工业大学, 2020.HU Bin. Research on key technologies of DOA estimation of sparse array based on compressed sensing[D]. [Ph. D. dissertation], Harbin Institute of Technology, 2020. [11] GE Qichao, ZHANG Yongshun, FENG Ziang, et al. Novel robust adaptive beamformer in the presence of gain-phase errors[J]. Circuits, Systems, and Signal Processing, 2021, 40(4): 1926–1947. doi: 10.1007/s00034-020-01568-7 [12] ZHU Hao, LEUS G, and GIANNAKIS G B. Sparsity-cognizant total least-squares for perturbed compressive sampling[J]. IEEE Transactions on Signal Processing, 2011, 59(5): 2002–2016. doi: 10.1109/TSP.2011.2109956 [13] MARKOVSKY I and VAN HUFFEL S. Overview of total least-squares methods[J]. Signal Processing, 2007, 87(10): 2283–2302. doi: 10.1016/j.sigpro.2007.04.004 [14] NESTARES O, FLEET D J, and HEEGER D J. Likelihood functions and confidence bounds for total-least-squares problems[C]. Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Hilton Head, USA, 2000: 13–15. [15] LI Hui, ZHAO Yongbo, CHENG Zengfei, et al. Robust adaptive beamforming based on sparse representation technique[J]. IET Radar, Sonar & Navigation, 2017, 11(9): 1417–1424. doi: 10.1049/iet-rsn.2016.0621 -


 下载:
下载:


图(3)
计量
- 文章访问数: 1135
- HTML全文浏览量: 863
- PDF下载量: 113
- 被引次数: 0
