

Single-observer DOA/TDOA Registration and Passive Localization Based on Constrained Total Least Squares
-
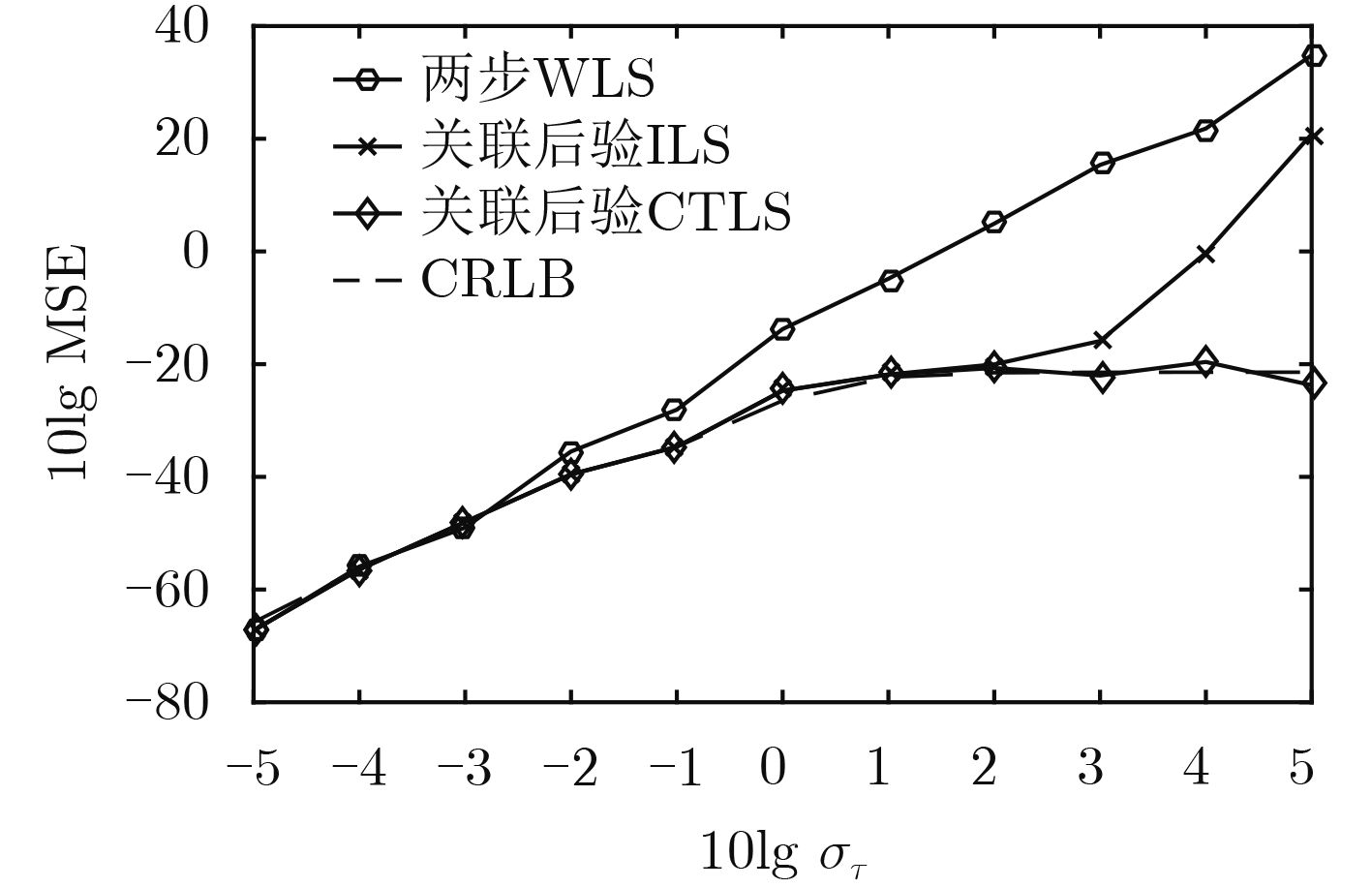
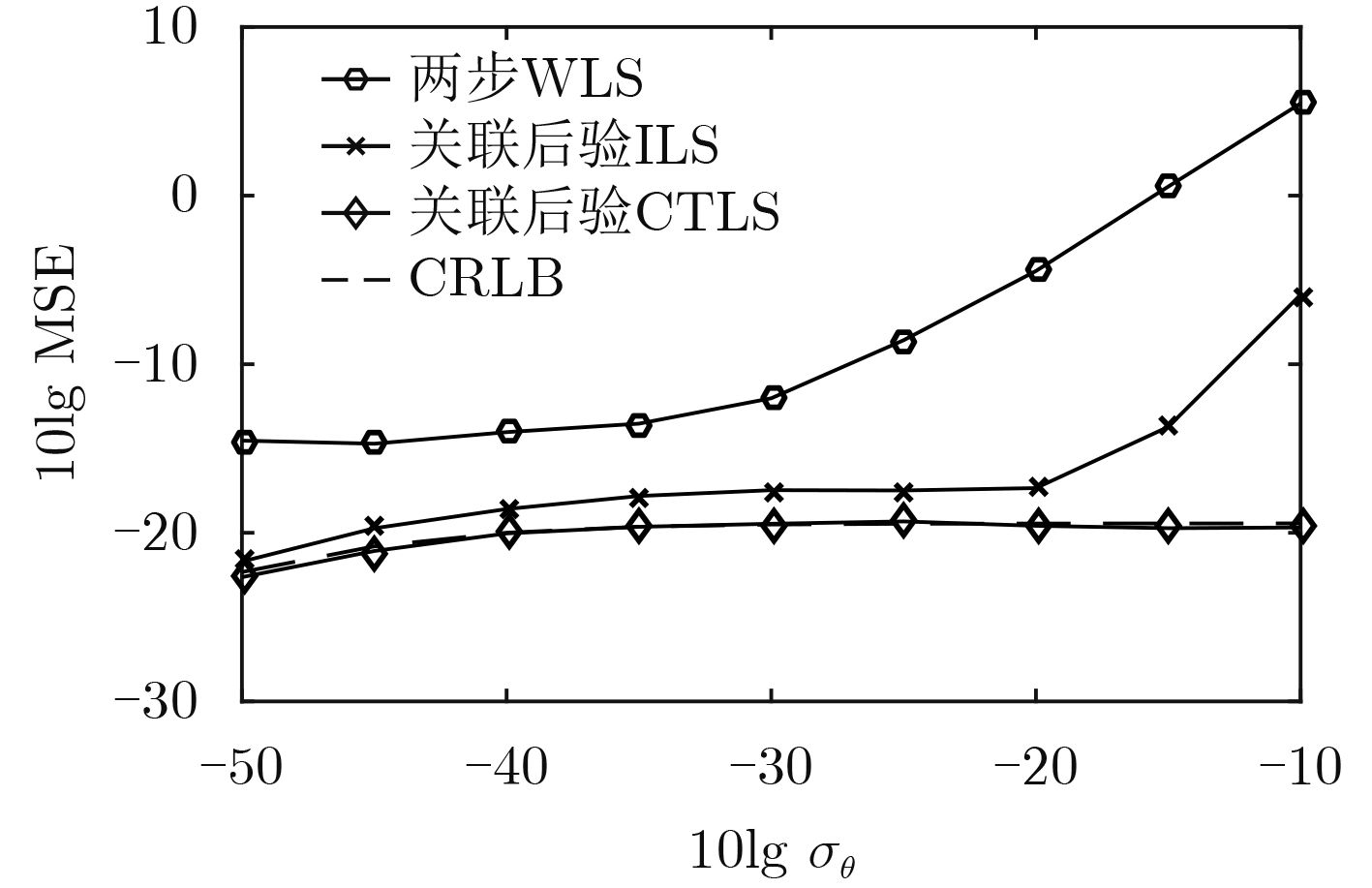
摘要: 多基外辐射源雷达定位系统受系统偏差影响较大。该文针对多基外辐射源雷达到达角度(DOA)和到达时差(TDOA)联合定位系统,提出一种基于约束总体最小二乘(CTLS)的无源定位和误差校正算法。首先引入辅助变量,将DOA和TDOA非线性观测方程进行线性化处理。考虑伪线性化后定位方程中噪声矩阵各分量统计相关特性,将无源定位与误差校正联合优化问题建立为CTLS模型,并采用牛顿迭代方法对模型求解。在此基础上,考虑辅助变量与目标位置的关联性,设计关联最小二乘算法改进目标位置估计值,采用后验迭代方法进一步提高系统偏差估计精度。最后推导了算法的理论误差。仿真结果表明:该算法能够有效地估计目标位置和系统偏差。Abstract: The system biases degrade seriously the location precision for the multi-static passive radar system. A joint registration and passive localization algorithm based on Constrained Total Least Squares (CTLS) using Direction Of Arrival (DOA) and Time Difference Of Arrival (TDOA) measurements is developed to address the multi-static radar localization problem under the influence of system biases. Firstly, the nonlinear DOA and TDOA measurement equations are linearized by introducing auxiliary variables. Considering the statistical correlation properties of the noise matrix in the pseudo-linear equations, a joint biases registration and passive localization problem is formulated as a CTLS problem and the Newton’s method is applied to solving the CTLS problem. Moreover, a dependent least squares algorithm is designed to improve the target position estimation using the relationship between auxiliary variables and target position. An iterative post-estimate procedure is exploited to enhance further the estimation accuracy of the system biases. Finally, the theoretical error of the proposed algorithm is derived. Simulations demonstrate that the proposed algorithm can effectively estimate the system biases and target position.
-
LIU Jun, LI Hongbin, and HIMED B. On the performance of the cross-correlation detector for passive radar applications[J]. Signal Processing, 2015, 113: 32–37. doi: 10.1016/j.sigpro.2015.01.006 INGGS M, TONG C, NADJIASNGAR R, et al. Planning and design phases of a commensal radar system in the FM broadcast band[J]. IEEE Aerospace and Electronic Systems Magazine, 2014, 29(7): 50–63. doi: 10.1109/MAES.2014.130165 GASSIER G, CHABRIEL G, BARRÈRE J, et al. A unifying approach for disturbance cancellation and target detection in passive radar using OFDM[J]. IEEE Transactions on Signal Processing, 2016, 64(22): 5959–5971. doi: 10.1109/TSP.2016.2600511 CHOI S, CROUSE D, WILLETT P, et al. Multistatic target tracking for passive radar in a DAB/DVB network: initiation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 2460–2469. doi: 10.1109/TAES.2015.130270 NOROOZI A and SEBT M A. Target localization in multistatic passive radar using SVD approach for eliminating the nuisance parameters[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(4): 1660–1671. doi: 10.1109/TAES.2017.2669558 赵拥军, 赵勇胜, 赵闯. 基于正则化约束总体最小二乘的单站DOA-TDOA无源定位算法[J]. 电子与信息学报, 2016, 38(9): 2336–2343. doi: 10.11999/JEIT151379ZHAO Yongjun, ZHAO Yongsheng, and ZHAO Chuang. Single-observer passive DOA-TDOA location based on regularized constrained total least squares[J]. Journal of Electronics &Information Technology, 2016, 38(9): 2336–2343. doi: 10.11999/JEIT151379 王鼎, 魏帅. 基于外辐射源的约束总体最小二乘定位算法及其理论性能分析[J]. 中国科学: 信息科学, 2015, 45(11): 1466–1489. doi: 10.1360/N112014-00397WANG Ding and WEI Shuai. The constrained-total-least-squares localization algorithm and performance analysis based on an external illuminator[J]. Scientia Sinica Informationis, 2015, 45(11): 1466–1489. doi: 10.1360/N112014-00397 YI Jianxin, WAN Xianrong, LEUNG H, et al. Noncooperative registration for multistatic passive radars[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(2): 563–575. doi: 10.1109/TAES.2015.140786 JEAN O and WEISS A J. Passive localization and synchronization using arbitrary signals[J]. IEEE Transactions on Signal Processing, 2014, 62(8): 2143–2150. doi: 10.1109/TSP.2014.2307281 田强, 冯大政, 杨凡, 等. 基于线性校正的TOA联合同步与定位算法[J]. 系统工程与电子技术, 2018, 40(2): 245–249. doi: 10.3969/j.issn.1001-506X.2018.02.01TIAN Qiang, FENG Dazheng, YANG Fan, et al. Joint TOA-based synchronization and localization via linear-correction technique[J]. Systems Engineering and Electronics, 2018, 40(2): 245–249. doi: 10.3969/j.issn.1001-506X.2018.02.01 WAN Xianrong, YI Jianxin, ZHAO Zhixin, et al. Experimental research for CMMB-based passive radar under a multipath environment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 70–85. doi: 10.1109/TAES.2013.120737 ZHOU Yifeng, LEUNG H, and YIP P C. An exact maximum likelihood registration algorithm for data fusion[J]. IEEE Transactions on Signal Processing, 1997, 45(6): 1560–1573. doi: 10.1109/78.599998 FORTUNATI S, GINI F, FARINA A, et al. On the application of the expectation-maximisation algorithm to the relative sensor registration problem[J]. IET Radar, Sonar & Navigation, 2013, 7(2): 191–203. doi: 10.1049/iet-rsn.2012.0050 FORTUNATI S, FARINA A, GINI F, et al. Least squares estimation and Cramér-Rao type lower bounds for relative sensor registration process[J]. IEEE Transactions on Signal Processing, 2011, 59(3): 1075–1087. doi: 10.1109/TSP.2010.2097258 WANG Yue and HO K C. TDOA source localization in the presence of synchronization clock bias and sensor position errors[J]. IEEE Transactions on Signal Processing, 2013, 61(18): 4532–4544. doi: 10.1109/TSP.2013.2271750 孙顺, 董凯, 齐林, 等. 基于TDOA与GROA的多运动站误差配准算法[J]. 电子与信息学报, 2017, 39(6): 1439–1445. doi: 10.11999/JEIT160562SUN Shun, DONG Kai, QI Lin, et al. Multiple moving observers registration algorithm based on TDOA and GROA[J]. Journal of Electronics &Information Technology, 2017, 39(6): 1439–1445. doi: 10.11999/JEIT160562 -

 下载:
下载:


图(6)
计量
- 文章访问数: 3162
- HTML全文浏览量: 1219
- PDF下载量: 116
- 被引次数: 0
 下载:
下载:
