

CRLB Optimization for O-RIS-Assisted VLP Systems
-
摘要: 针对智能超表面(reconfigurable intelligent surface, RIS)辅助的室内可见光定位(visible light positioning, VLP)系统性能优化问题,本文分别研究了近场与远场下针对系统克拉美罗下届(Cramer-Rao lower bound, CRLB)优化方法。通过优化RIS配置,以提升系统定位精度与整体定位性能公平性。在远场信道模型假设下,可将RIS方向优化问题建模为接收功率最大化问题,并应用一种结合粒子群优化与N步迭代的定位算法,在接收机位置未知的情况下实现了RIS方向的动态最优调整。在近场信道模型假设下,可将RIS单元与发光二极管(light-emitting diode, LED的分配问题构建为马尔可夫决策过程,并设计一种基于经验回放与知识利用的强化学习方法进行求解,在最小化CRLB的同时,兼顾不同区域用户的定位公平性。仿真结果表明,所提算法在两种模型下均能有效提升系统定位精度,且在近场模型中显著改善了全域定位性能。Abstract:
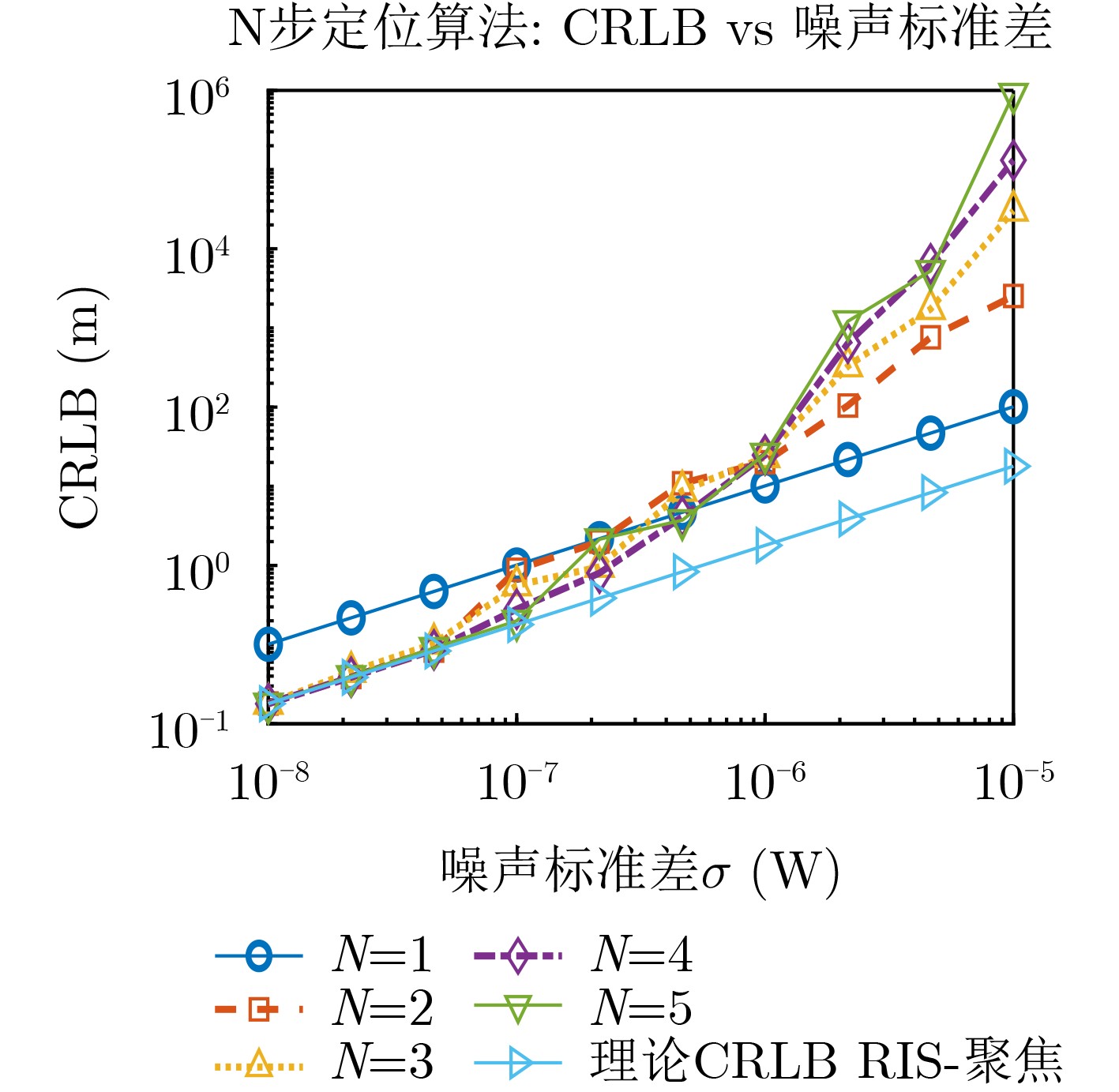
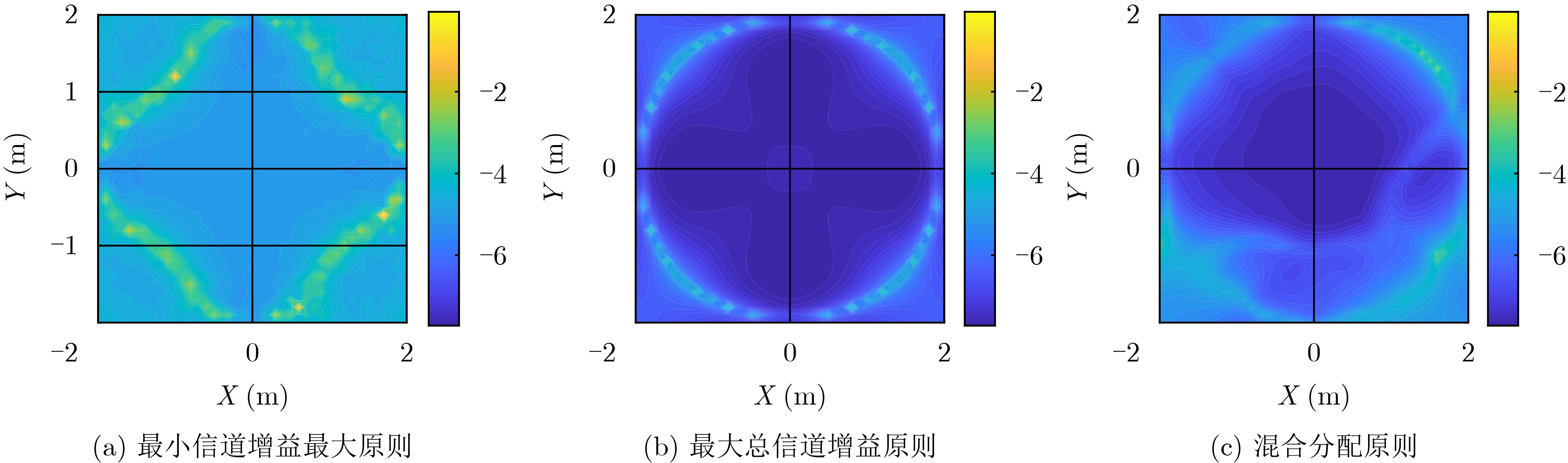
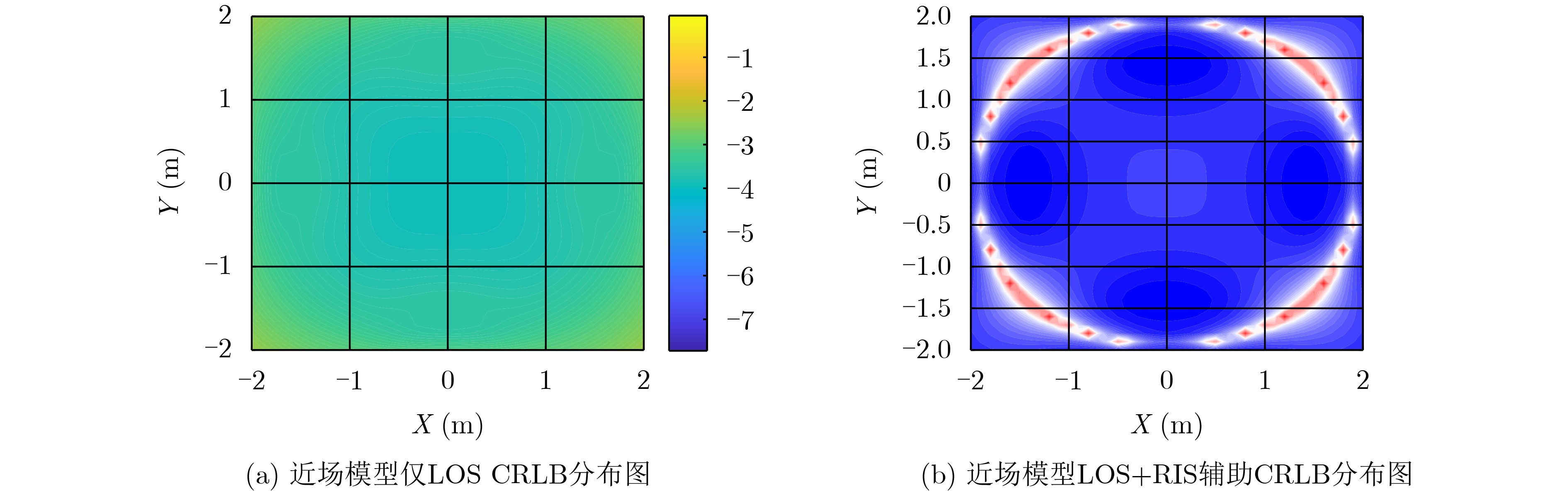
Objective With the rapid development of indoor location-based services, Visible Light Positioning (VLP) has emerged as a promising high-accuracy positioning technology. The integration of Optical Reconfigurable Intelligent Surfaces (O-RIS) into VLP systems can effectively enhance signal coverage and improve positioning performance. However, optimizing the positioning accuracy and fairness across different user areas in RIS-assisted VLP systems remains a challenging issue. This study focuses on optimizing the Cramer-Rao Lower Bound (CRLB) of the system under both near-field and far-field channel models, aiming to enhance overall positioning precision and fairness through RIS configuration. Methods Under the far-field channel model assumption, the RIS orientation optimization problem is formulated as a received power maximization problem. A positioning algorithm combining Particle Swarm Optimization (PSO) and N-step iteration is proposed to dynamically adjust the RIS orientation optimally without prior knowledge of the receiver’s position. Under the near-field channel model assumption, the allocation problem between RIS elements and LEDs is constructed as a Markov Decision Process (MDP). A reinforcement learning method based on experience replay and knowledge utilization is designed to solve this problem, aiming to minimize the CRLB while ensuring positioning fairness for users in different regions. Results and Discussions Simulation results demonstrate that the proposed algorithms effectively enhance system positioning performance under both models. In the far-field model, the PSO-based iterative algorithm achieves dynamic optimization of RIS orientation, significantly improving positioning accuracy ( Fig. 3 ). Under the near-field model, the reinforcement learning approach not only minimizes the CRLB but also considerably improves positioning fairness across the entire area, with a noticeable reduction in performance disparity among users in different zones (Fig. 5 ,Fig. 6 ). Comparative experiments show that the proposed methods outperform conventional RIS configuration strategies in terms of both average positioning error and fairness index (Table 1 ).Conclusions This paper investigates CRLB optimization methods for O-RIS-assisted VLP systems under near-field and far-field channel models. In the far-field scenario, a PSO-based iterative algorithm is proposed to optimize RIS orientation, enhancing positioning accuracy without requiring prior receiver location information. In the near-field scenario, a reinforcement learning-based approach is designed to optimize RIS element–LED allocation, which effectively minimizes the CRLB and improves positioning fairness across the whole area. Simulation results validate the effectiveness of the proposed algorithms in both models. Future work may consider more practical channel impairments and multi-user scenarios to further improve the robustness and scalability of the system. -
表 1 基于MERAC的强化学习算法
算法1 基于MERAC的智能资源分配 输入:信道增益$ H_{i,k}^{\text{ref}} $ RIS单元数$ {N}_{\text{R}} $ LED灯个数$ {N}_{L} $ 学习速率因子$ {\beta }_{a} $和$ {\beta }_{c} $,折扣参数$ \gamma $ 初始化:初始化分配矩阵$ \text{G} $,$ {\text{s}}_{0} $,$ {\text{Q(s}}_{\text{t}}{\text{,a}}_{\text{t}}) $ 1:For t=1:T 2:在状态$ {s}_{t} $基于$ {\text{π} }_{t}({s}_{t},{a}_{t}) $选择一个动作$ a_{t}^{na} $。 3: 计算$ r $中的奖励$ {r}_{t} $,并更新状态$ {s}_{t+1} $; 4:找到历史学得的动作$ {a}^{er} $如果代理是新出现或表现不佳,则执行$ {a}^{er} $; 5:分别更新 9:跟新策略函数$ {\text{π} }_{t+1}({s}_{t},a_{t}^{\text{ov}}) $ End  下载: 导出CSV
下载: 导出CSV
-
[1] JOVICIC A, LI Junyi, and RICHARDSON T. Visible light communication: Opportunities, challenges and the path to market[J]. IEEE Communications Magazine, 2013, 51(12): 26–32. doi: 10.1109/MCOM.2013.6685754. [2] ZHUANG Yuan, HUA Luchi, QI Longning, et al. A survey of positioning systems using visible LED lights[J]. IEEE Communications Surveys & Tutorials, 2018, 20(3): 1963–1988. doi: 10.1109/COMST.2018.2806558. [3] Markets and Markets. Indoor location market by component (hardware, solutions, and services), technology (BLE, UWB, Wi-Fi, RFID), application (emergency response management, remote monitoring), organization size, vertical, and region - global forecast to 2026[EB/OL]. https://www.marketsandmarkets.com/Market-Reports/indoor-location-market-989.html, 2021.(查阅网上资料,未找到本条文献信息,请确认). [4] Grand View Research Inc. Visible Light Communication (VLC)/Light fidelity (Li-Fi) market analysis by component (LED, Photodetector, Microcontroller), by application (retail, automotive & transportation, consumer electronics, healthcare, defense & security and aviation) and segment forecasts to 2024[EB/OL]. https://www.grandviewresearch.com/industry-analysis/visible-light-communication-market, 2016. (查阅网上资料,未找到本条文献信息,请确认). [5] PETROSINO A, STRICCOLI D, ROMANOV O, et al. Light fidelity for internet of things: A survey[J]. Optical Switching and Networking, 2023, 48: 100732. doi: 10.1016/j.osn.2023.100732. [6] BOZANIS D, EVGENIDIS N G, PAPANIKOLAOU V K, et al. Indoor 3D visible light positioning analysis with channel estimation errors[C]. 2023 30th International Conference on Systems, Signals and Image Processing (IWSSIP), Ohrid, North Macedonia, 2023: 1–4. doi: 10.1109/IWSSIP58668.2023.10180234. [7] MA Shuai, LI Bing, ZHANG Guanjie, et al. Centimeter-level 3-D mobile online visible light positioning system with single LED lamp[J]. IEEE Internet of Things Journal, 2024, 11(1): 418–429. doi: 10.1109/JIOT.2023.3285556. [8] CAO Xiaoxiang, ZHUANG Yuan, CHEN Guoliang, et al. A visible light positioning system based on a particle filter and deep learning[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(3): 2735–2748. doi: 10.1109/TAES.2023.3293781. [9] LIU Ren, LIANG Zhonghua, YANG Kuo, et al. Machine learning based visible light indoor positioning with single-LED and single rotatable photo detector[J]. IEEE Photonics Journal, 2022, 14(3): 7322511. doi: 10.1109/jphot.2022.3163415. [10] SUN Xiao, ZHUANG Yuan, HUAI Jianzhu, et al. RSS-based visible light positioning using nonlinear optimization[J]. IEEE Internet of Things Journal, 2022, 9(15): 14137–14150. doi: 10.1109/JIOT.2022.3156616. [11] AKIYAMA T, SUGIMOTO M, and HASHIZUME H. Time-of-arrival-based smartphone localization using visible light communication[C]. 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 2017: 1–7. doi: 10.1109/IPIN.2017.8115904. [12] SONER B and COLERI S. Visible light communication based vehicle localization for collision avoidance and platooning[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2167–2180. doi: 10.1109/TVT.2021.3061512. [13] LI Zhengpeng, QIU Guodong, ZHAO Lei, et al. Dual-mode LED aided visible light positioning system under multi-path propagation: Design and demonstration[J]. IEEE Transactions on Wireless Communications, 2021, 20(9): 5986–6003. doi: 10.1109/TWC.2021.3071469. [14] ZHANG Kehan, ZHANG Zaichen, and ZHU Bingcheng. Beacon LED coordinates estimator with selected AOA estimators for visible light positioning systems[J]. IEEE Transactions on Wireless Communications, 2024, 23(3): 1713–1727. doi: 10.1109/TWC.2023.3291416. [15] ABOAGYE S, NDJIONGUE A R, NGATCHED T M N, et al. RIS-assisted visible light communication systems: A tutorial[J]. IEEE Communications Surveys & Tutorials, 2023, 25(1): 251–288. doi: 10.1109/COMST.2022.3225859. [16] ABOAGYE S, NGATCHED T M N, DOBRE O A, et al. Intelligent reflecting surface-aided indoor visible light communication systems[J]. IEEE Communications Letters, 2021, 25(12): 3913–3917. doi: 10.1109/LCOMM.2021.3114594. [17] GUZMAN B G, CESPEDES M M, JIMENEZ V P G, et al. Resource allocation exploiting reflective surfaces to minimize the outage probability in VLC[J]. IEEE Transactions on Wireless Communications, 2025, 24(7): 5493–5507. doi: 10.1109/twc.2025.3547648. [18] AN Nan, YANG Fang, CHENG Ling, et al. IRS-assisted aggregated VLC-RF system: Resource allocation for energy efficiency maximization[J]. IEEE Transactions on Wireless Communications, 2024, 23(10): 12578–12593. doi: 10.1109/TWC.2024.3393621. [19] ABDELHADY A M, SALEM A K S, AMIN O, et al. Visible light communications via intelligent reflecting surfaces: Metasurfaces vs mirror arrays[J]. IEEE Open Journal of the Communications Society, 2021, 2: 1–20. doi: 10.1109/OJCOMS.2020.3041930. [20] SUN Shiyuan, YANG Fang, SONG Jian, et al. Intelligent reflecting surface for MIMO VLC: Joint design of surface configuration and transceiver signal processing[J]. IEEE Transactions on Wireless Communications, 2023, 22(9): 5785–5799. doi: 10.1109/TWC.2023.3236811. [21] SUN Wenjing, CHEN Jian, and YU Cangyuan. Indoor receiving signal strength based visible light positioning enabled with equivalent virtual lamps[J]. Applied Optics, 2023, 62(17): 4583–4590. doi: 10.1364/AO.482797. [22] KOKDOGAN F and GEZICI S. Intelligent reflecting surfaces for visible light positioning based on received power measurements[J]. IEEE Transactions on Vehicular Technology, 2024, 73(9): 13108–13121. doi: 10.1109/TVT.2024.3390178. [23] KAHSAY L Z, NASER S, ELDEEB H B, et al. O-RIS assisted NOMA-VLC system: Integrated positioning and communications[J]. IEEE Wireless Communications Letters, 2025, 14(9): 2703–2707. doi: 10.1109/LWC.2025.3576717. [24] MARINI F and WALCZAK B. Particle swarm optimization (PSO). A tutorial[J]. Chemometrics and Intelligent Laboratory Systems, 2015, 149: 153–165. doi: 10.1016/j.chemolab.2015.08.020. [25] KUMAR A M S, PARTHIBAN K, and SHANKAR S SKUMAR A M S, PARTHIBAN K, and SHANKAR S S. An efficient task scheduling in a cloud computing environment using hybrid Genetic Algorithm-Particle Swarm Optimization (GA-PSO) algorithm[C]. 2019 International Conference on Intelligent Sustainable Systems (ICISS), Palladam, India, 2019: 29–34. doi: 10.1109/ISS1.2019.8908041. [26] SHI Y and EBERHART R C. Empirical study of particle swarm optimization[C]. Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, USA, 1999: 1945–1950. doi: 10.1109/CEC.1999.785511. [27] SUTTON R S and BARTO A G. Reinforcement Learning: An Introduction[M]. Cambridge, USA: MIT Press, 1998. . [28] YANG Helin, DU Pengfei, ZHONG Wende, et al. Reinforcement learning-based intelligent resource allocation for integrated VLCP systems[J]. IEEE Wireless Communications Letters, 2019, 8(4): 1204–1207. doi: 10.1109/LWC.2019.2911682. [29] 胡文学, 王泽华, 余成, 等. 基于平面扩展和约束优化的激光惯性SLAM方法[J]. 光电工程, 2024, 51(4): 230279. doi: 10.12086/oee.2024.230279.HU Wenxue, WANG Zehua, YU Cheng, et al. A laser inertial SLAM approach based on planar expansion and constrained optimization[J]. Opto-Electron Engineering, 2024, 51(4): 230279. doi: 10.12086/oee.2024.230279. [30] 易卿武, 黄璐, 蔚保国, 等. 面向室内地下遮蔽空间的定位可信性提升方法[J]. 电子与信息学报, 2025, 47(5): 1529–1542. doi: 10.11999/JEIT240870.YI Qingwu, HUANG Lu, WEI Baoguo, et al. Methods for enhancing positioning reliability in indoor and underground satellite-shielded environments[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1529–1542. doi: 10.11999/JEIT240870. -

 下载:
下载:


图(8) / 表(1)
计量
- 文章访问数: 116
- HTML全文浏览量: 106
- PDF下载量: 7
- 被引次数: 0
