

Multi-dimensional Resource Joint Optimization Algorithm for UAV Inspection of Collaborative Tasks of Perception and AI
-
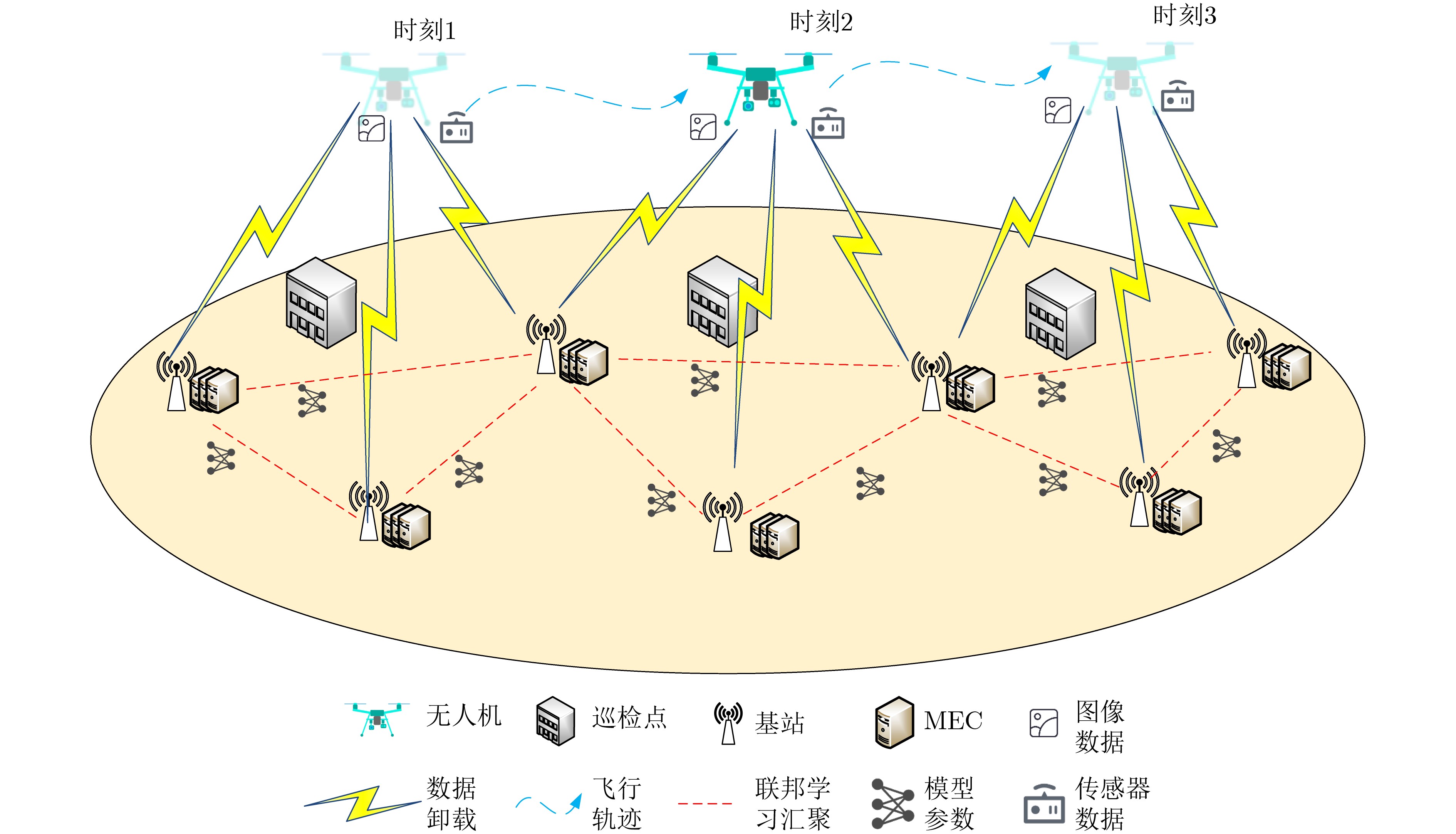
摘要: 针对在无人机感知与故障检测并发场景下,无人机巡检过程中任务复杂,带宽、算力和功率等多维资源调度困难的问题,该文提出一种面向感知与AI协同规划的智能无人机巡检多维资源联合优化算法。首先提出一种单无人机与多个计算节点之间联合协同完成多个任务的框架,在无人机与多个边缘计算节点协同工作的系统框架下,无人机在巡检点采集图像与传感器数据,并将其分批传输至多个节点进行分布式处理,完成飞行状态感知与故障检测任务,最终形成了以无人机系统能耗最小化为目标,带宽、功率、算力、节点选择、数据量和压缩率为变量的最优化问题。针对该问题,将原优化问题分解为4个子问题,分别采用双辅助混合整数线性规划(MILP)转化、数据驱动边界学习、基于逐次凸逼近(SCA)的带宽功率联合优化和下界解析分配等方法进行求解,并通过交替优化策略实现整体优化,并进行了复杂度分析。最后仿真结果表明,与其它先进算法相比,所提方法在时延、能耗、精度方面具有更优的性能。Abstract:
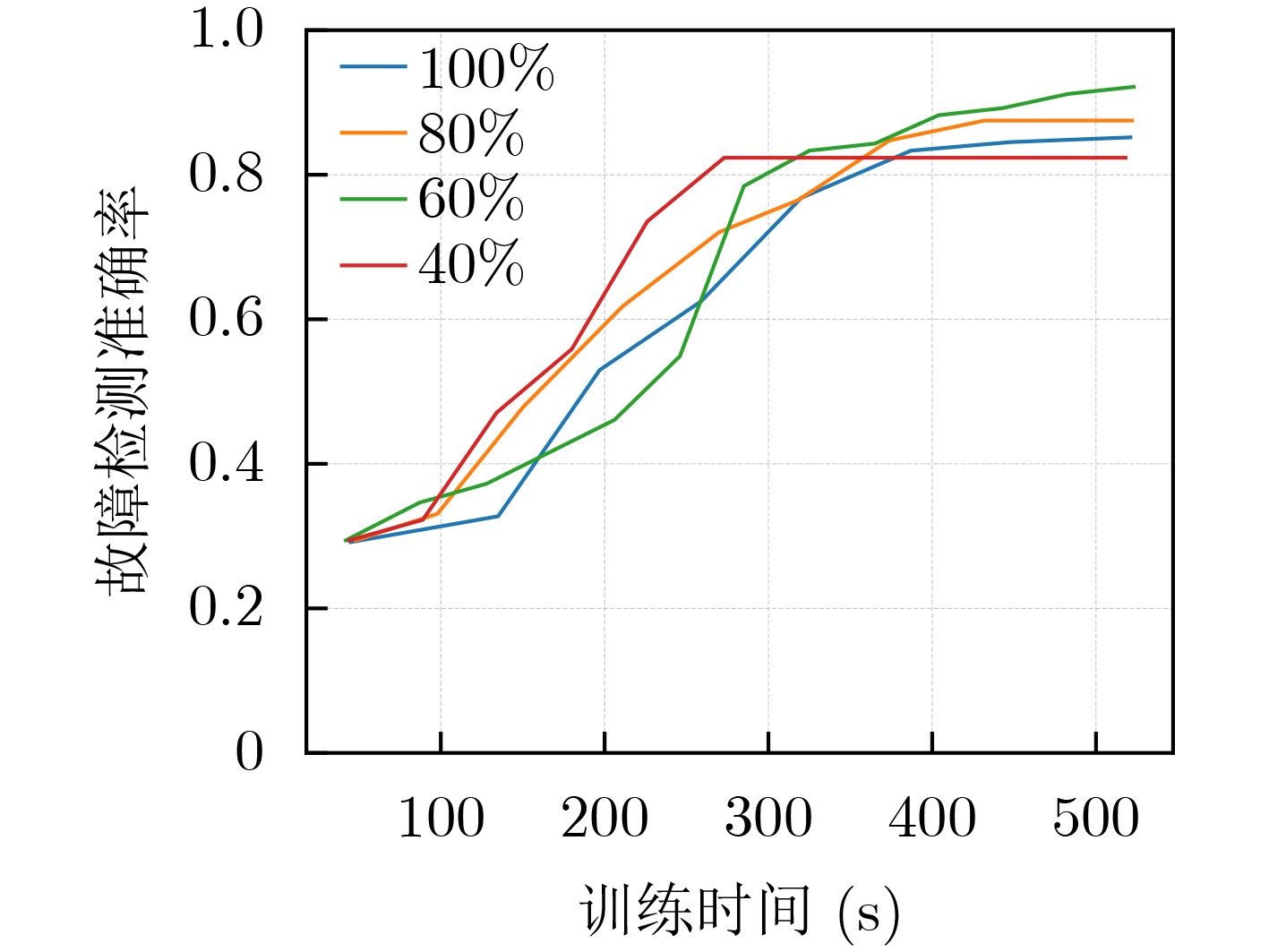
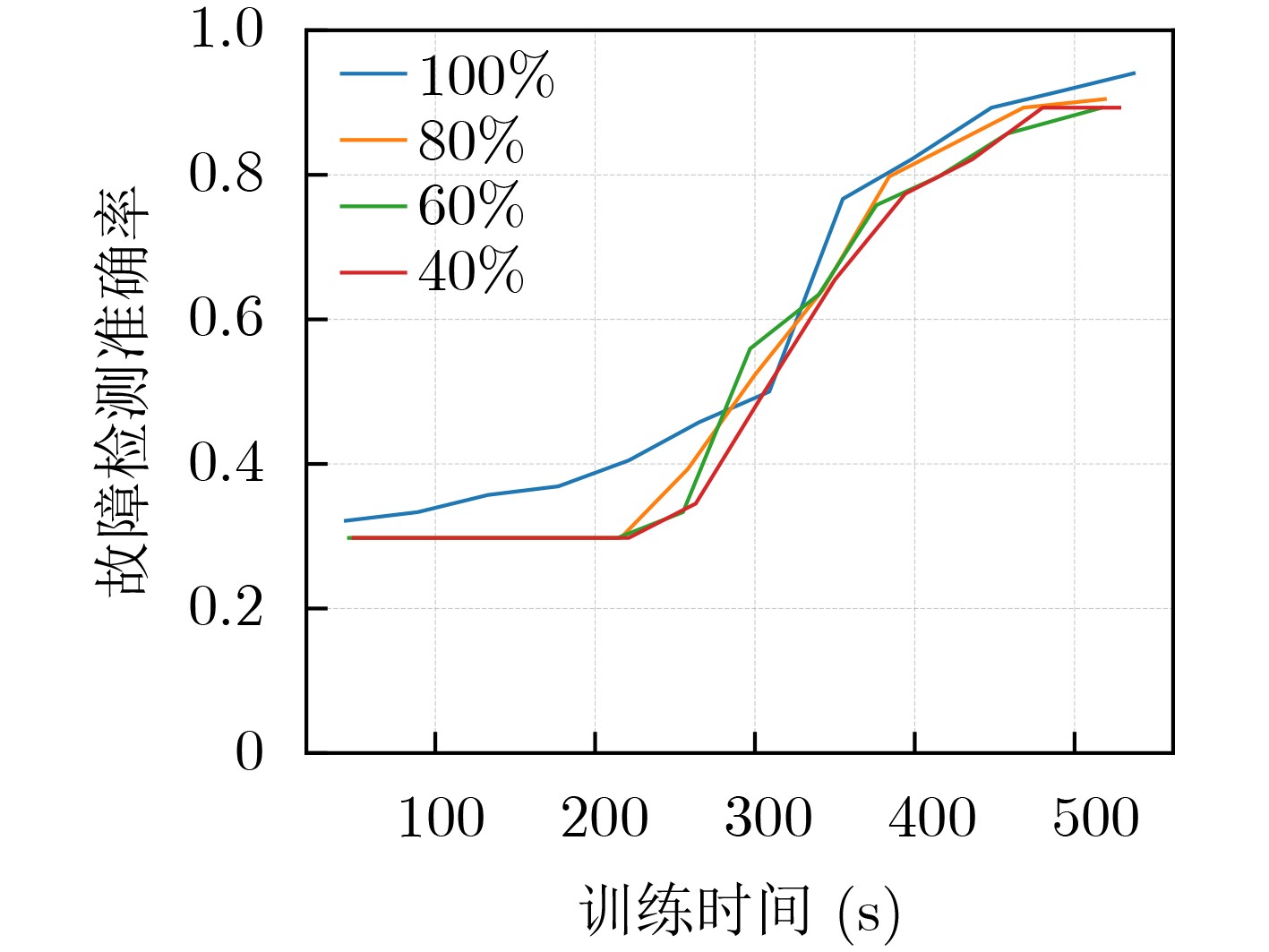
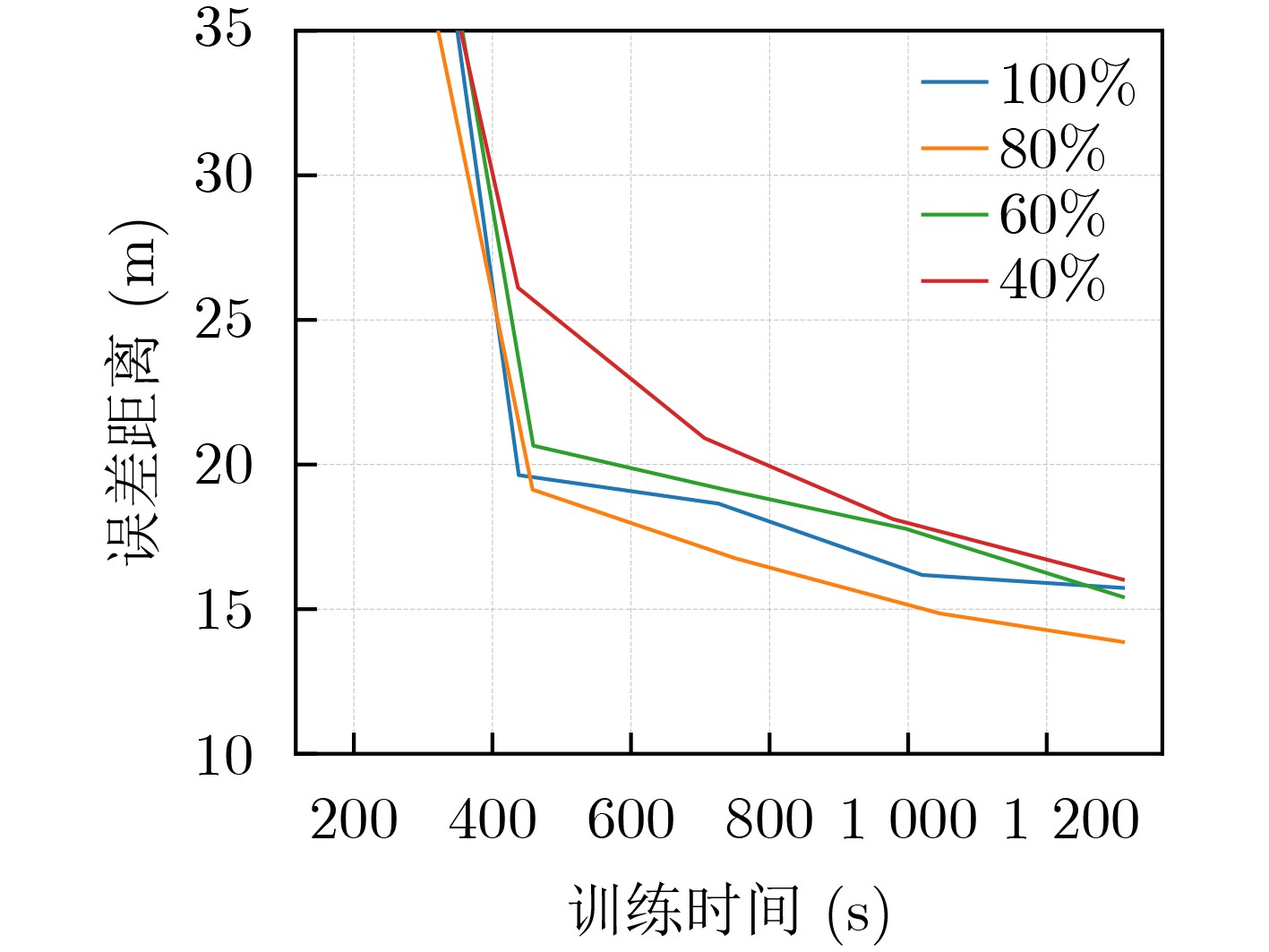
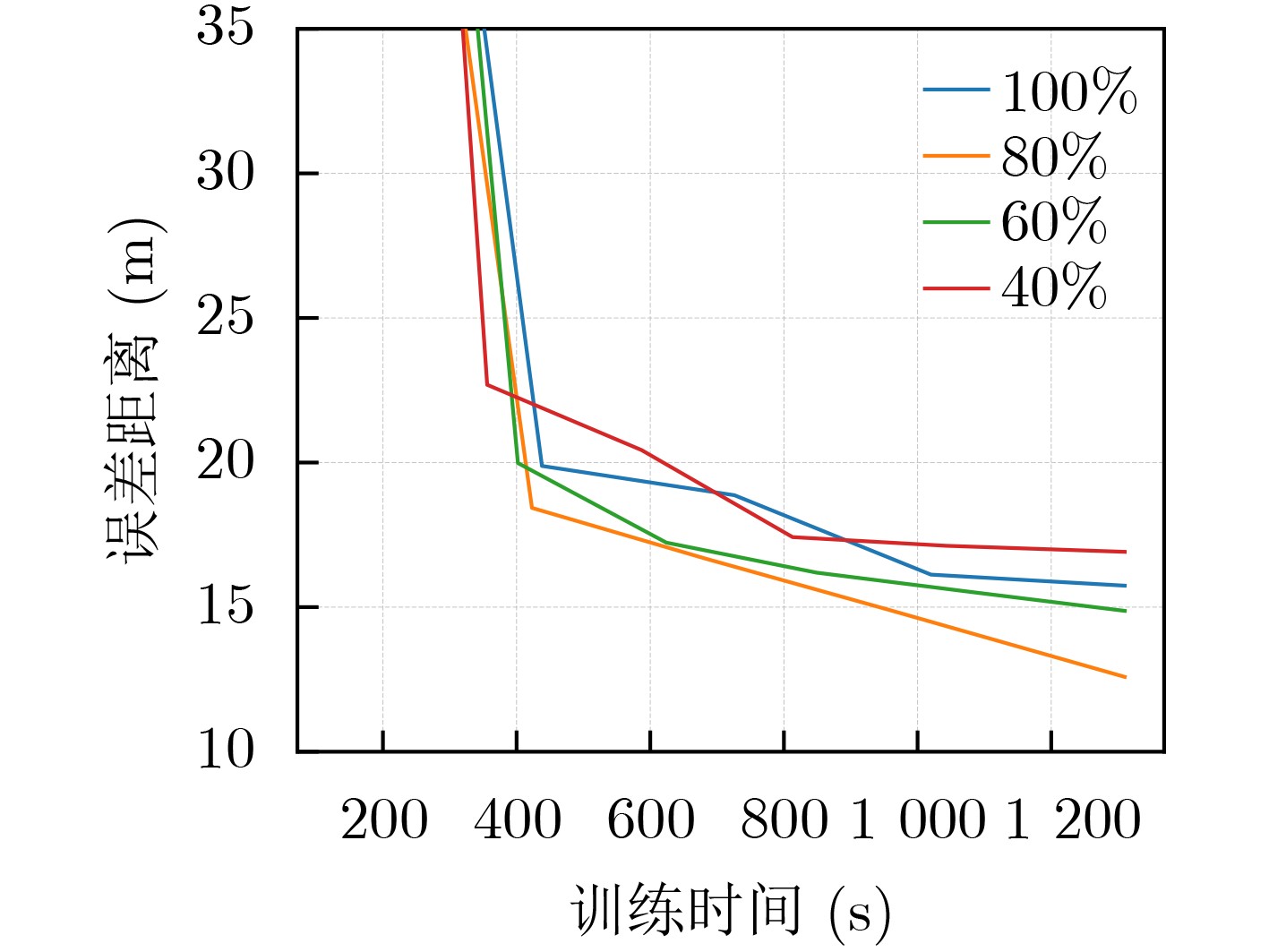
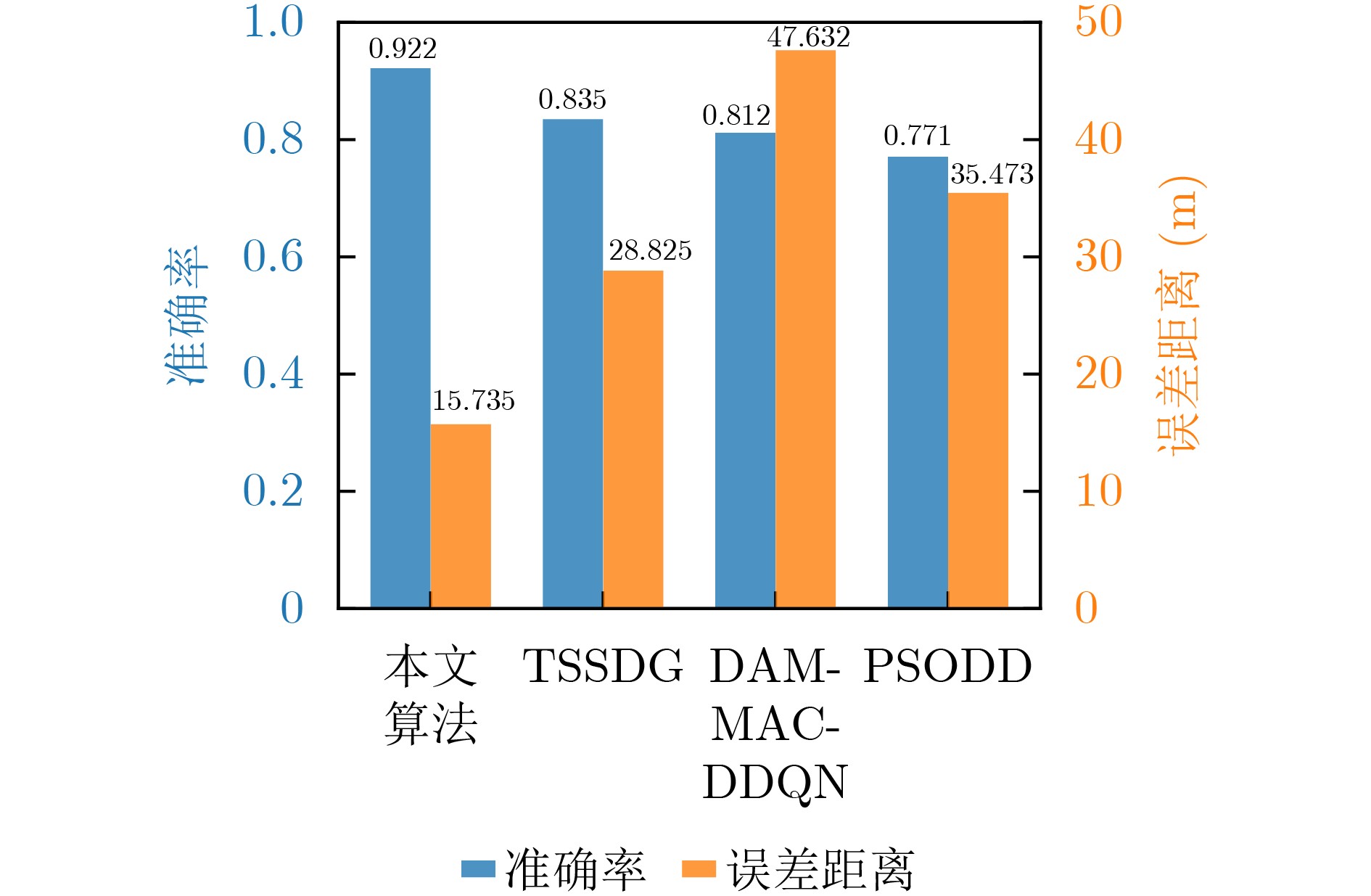
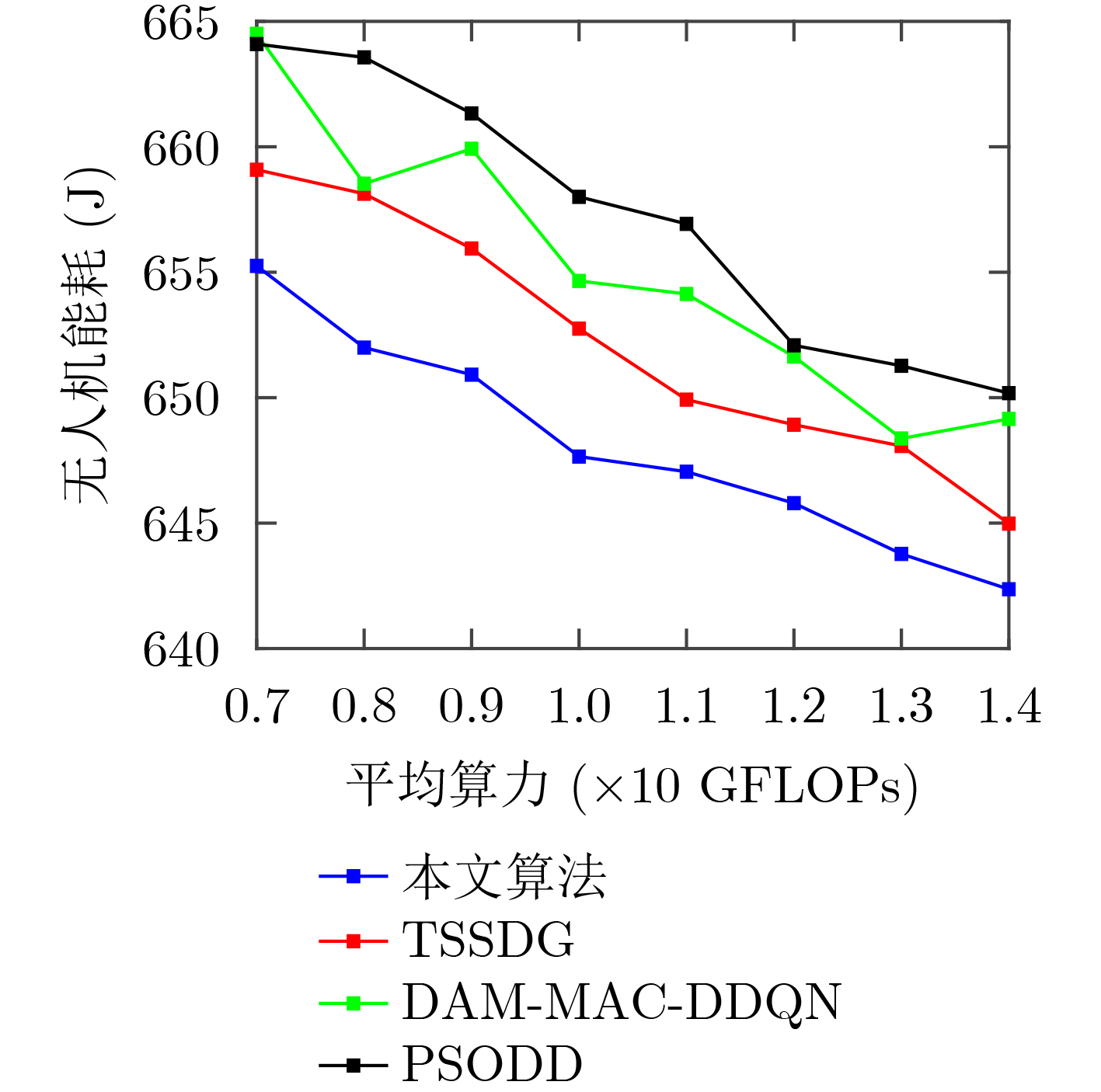
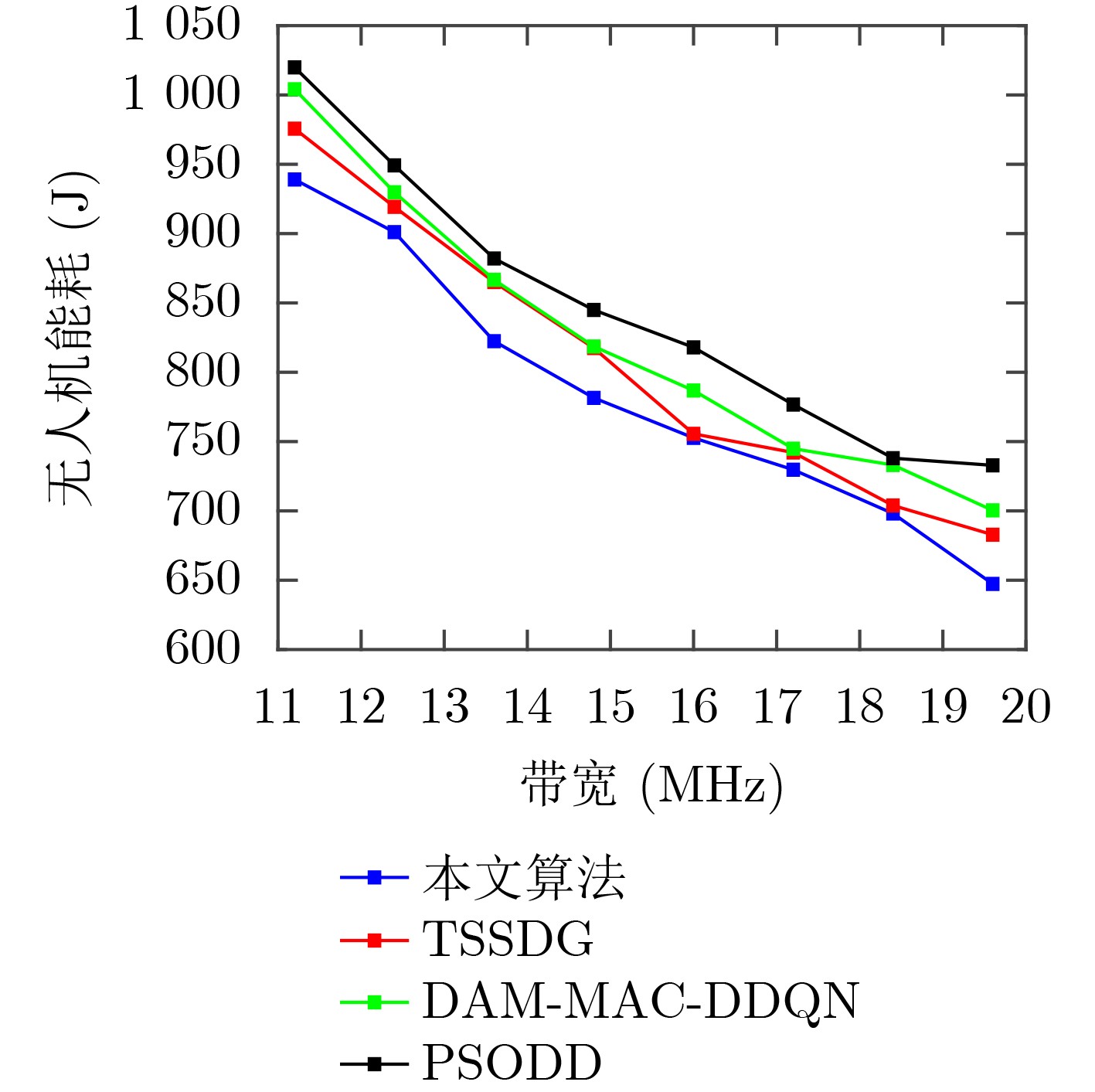
Objective With increasing demand for aerial operations, the capabilities of various aircraft are steadily expanding across all airspace levels and multiple industries. The application of Unmanned Aerial Vehicles (UAVs) now spans multiple altitude layers, from low to high altitudes, and covers micro, medium, and large models. UAVs are widely used in public safety, transportation, emergency management, logistics and distribution, geographic surveying and mapping, and other fields, thereby promoting innovation and transformation in production and daily life. Compared with traditional manual inspection, UAV inspection, as an emerging operational approach, can acquire image information that is difficult for the human eye to capture. Labor costs are therefore significantly reduced, and the accuracy and efficiency of inspection operations are improved. However, UAV inspection also creates new challenges for multidimensional resource allocation and task scheduling. In power system inspection, for example, transmission lines are exposed to outdoor environments for long periods and are vulnerable to corrosion, aging, and even damage. Regular inspections are therefore required to ensure operational safety. Methods A four-stage multidimensional resource inspection and scheduling collaborative optimization algorithm is proposed. The original optimization problem is decomposed into four subproblems according to the inspection process. After mathematical analysis of each subproblem, a corresponding solution method is proposed. For the node selection problem, a dual-aided Mixed-Integer Linear Programming (MILP) transformation method is used. For the UAV data acquisition problem, a data-driven boundary learning method is adopted. For UAV communication resource allocation, a bandwidth-power joint optimization algorithm based on Successive Convex Approximation (SCA) is used. For node computing power allocation, a lower-bound analytical allocation method is adopted. Finally, the original problem is solved by an alternating optimization method across the subproblems, thereby forming the complete algorithm. Results and Discussions Simulation results show that the proposed algorithm reduces overall UAV energy consumption compared with the benchmark algorithms. Simulation training is conducted for visual positioning and fault detection services to examine the relationship among compression ratio, data volume, and service performance. Figures 2 ~5 show that fault detection accuracy reaches its optimum at 60% data volume and 60% compression ratio. Visual positioning accuracy reaches its optimum at 80% data volume and 80% compression ratio.Figure 6 shows that the proposed algorithm achieves higher accuracy than the benchmark algorithms for AI services. As shown inFigures 7 and8 , under varying bandwidth, computing power, and other resource conditions, the proposed algorithm consistently performs better than the benchmark algorithms in terms of energy consumption and effectively reduces total energy consumption.Conclusions A multidimensional resource joint optimization algorithm is proposed for intelligent UAV inspection with collaborative perception and AI tasks. An optimization problem is formulated with the objective of minimizing UAV energy consumption, using bandwidth, power, computing power, node selection, data volume, and actual compression ratio as variables. The algorithm jointly minimizes UAV energy consumption for two AI services, fault detection and visual localization. Simulation results show that the algorithm reduces total UAV energy consumption and improves model training accuracy. This study focuses on the application scenario of single-UAV inspection. More complex multi-UAV collaborative inspection scenarios can be examined in future work, and additional services can be incorporated for a more comprehensive analysis. -
1 4阶段多维资源巡检调度协同优化算法
1:使用不同的$ {D}^{\text{img}} $和$ \hat{\lambda } $训练神经网络,确定出$ {D}^{\text{img}} $, $ \hat{\lambda } $与两种误差$ {\varepsilon }^{\text{sense}} $, $ {\varepsilon }^{\text{img}} $的关系图 2:根据关系图得到$ {D}^{\text{img}} $的下界和$ \zeta $的上界并以之作为二者的解 3:初始化其余优化变量$ {\boldsymbol{\beta }}^{(0)},{\boldsymbol{B}}^{(0)},{\boldsymbol{w}}^{(0)},{\boldsymbol{c}}^{(0)} $ 4:while ($ e_{\mathrm{u}}^{(t)}-e_{\mathrm{u}}^{(t-1)} \gt \delta $) 5: 固定变量$ {\boldsymbol{B}}^{(t-1)},{\boldsymbol{w}}^{(t-1)},{\boldsymbol{c}}^{(t-1)} $,使用MILP求解器求解$ {\boldsymbol{\beta }}^{(t)} $ 6: 固定变量$ {\boldsymbol{\beta }}^{(t)},{\boldsymbol{c}}^{(t-\mathbf{1})} $,使用SCA近似算法求解$ {\boldsymbol{B}}^{(t)},{\boldsymbol{w}}^{(t)} $ 7: 固定变量$ {\boldsymbol{\beta }}^{(t)},{\boldsymbol{B}}^{(t)},{\boldsymbol{w}}^{(t)} $,根据$ {t}^{\text{sense}}+{t}^{\text{compute}}+{t}^{\text{control}}\leq T $求解每个节点$ c_{m}^{1} $的下界$ c_{m,\min }^{1} $并取$ {{c_{m}^{1}}}^{(t)}=c_{m,\min }^{1} $,
$ {{c_{m}^{2}}}^{(t)}={c}_{m}-c_{m,\min }^{1} $8: 将$ {\boldsymbol{\beta }}^{\left(t\right)},{\boldsymbol{B}}^{\left(t\right)},{\boldsymbol{w}}^{\left(t\right)},{\boldsymbol{c}}^{\left(t\right)} $代入目标函数求得$ e_{\mathrm{u}}^{(t)} $ 9:end while  下载: 导出CSV
下载: 导出CSV
-
[1] 谷美颖, 李航, 张家伟, 等. 基于视觉的无人机定位与导航方法研究综述[J]. 电子学报, 2025, 53(3): 651–685. doi: 10.12263/DZXB.20240699.GU Meiying, LI Hang, ZHANG Jiawei, et al. A review of vision-based UAV localization and navigation methods[J]. Acta Electronica Sinica, 2025, 53(3): 651–685. doi: 10.12263/DZXB.20240699. [2] YANG Yuwei, HE Minheng, LIU Juan, et al. The UAV intelligent inspection technology in the transformer substation inspection[C]. 2025 5th Power System and Green Energy Conference, Hong Kong, China, 2025: 215–219. doi: 10.1109/PSGEC66102.2025.11151059. [3] 肖国德, 张贺. 基于深度学习的无人机输变配一体化巡检系统[J]. 自动化应用, 2024, 65(23): 4–6. doi: 10.19769/j.zdhy.2024.23.002.XIAO Guode and ZHANG He. Deep learning-based unmanned aerial vehicle integrated inspection system for power transmission transformation and distribution[J]. Automation Application, 2024, 65(23): 4–6. doi: 10.19769/j.zdhy.2024.23.002. [4] HE Zhenyao, XU Wei, SHEN Hong, et al. Integrated sensing and full-duplex communication: Joint transceiver beamforming and power allocation[C]. 2023 IEEE International Conference on Acoustics, Speech and Signal Processing, Rhodes Island, Greece, 2023: 1–5. doi: 10.1109/ICASSP49357.2023.10097111. [5] DONG Huanyu, LI Peichun, DAI Minghui, et al. Coordinated multi-point aided integrated sensing, communication and computation system: An energy efficient design[C]. 2024 IEEE/CIC International Conference on Communications in China, Hangzhou, China, 2024: 54–59. doi: 10.1109/ICCC62479.2024.10681790. [6] DENG Cailian, FANG Xuming, and WANG Xianbin. Integrated sensing, communication, and computation with adaptive DNN Splitting in multi-UAV networks[J]. IEEE Transactions on Wireless Communications, 2024, 23(11): 17429–17445. doi: 10.1109/TWC.2024.3453650. [7] ZHANG Ruizhi, ZHANG Ying, TANG Rui, et al. A joint UAV Trajectory, User association, and beamforming design strategy for multi-UAV-assisted ISAC systems[J]. IEEE Internet of Things Journal, 2024, 11(18): 29360–29374. doi: 10.1109/JIOT.2024.3430390. [8] ZHANG Xin, CHANG Zheng, ZHANG Guopeng, et al. Trajectory optimization and resource allocation for time minimization in the UAV-enabled MEC system[C]. 2022 IEEE Wireless Communications and Networking Conference, Austin, USA, 2022: 333–338. doi: 10.1109/WCNC51071.2022.9771719. [9] 王怡, 覃团发, 韦睿, 等. SAG-MEC网络下支持WPT的无人机动态任务卸载与资源分配[J/OL]. 计算机工程, 1–10. https://doi.org/10.19678/j.issn.1000-3428.0070030, 2024.WANG Yi, QIN Tuanfa, WEI Rui, et al. Dynamic task unloading and resource allocation of UAVs supported by WPT in SAG-MEC network[J/OL]. Computer Engineering, 1–10. https://doi.org/10.19678/j.issn.1000-3428.0070030, 2024. [10] 王轶宇, 钱鹏智, 张余, 等. 基于联盟博弈的无人机集群任务分配与频谱资源联合规划方法[J]. 中国电子科学研究院学报, 2024, 19(7): 647–657. doi: 10.3969/j.issn.1673-5692.2024.07.009.WANG Yiyu, QIAN Pengzhi, ZHANG Yu, et al. Task allocation and joint spectrum resource planning for UAV cluster based on alliance game theory[J]. Journal of China Academy of Electronics and Information Technology, 2024, 19(7): 647–657. doi: 10.3969/j.issn.1673-5692.2024.07.009. [11] BAYESSA G A, CHAI Rong, LIANG Chengchao, et al. Content fetching delay optimization-based caching and resource allocation for UAV-enabled networks[J]. IEEE Access, 2024, 12: 62429–62447. doi: 10.1109/ACCESS.2024.3395279. [12] GAO Yuan, DING Yu, WANG Ye, et al. Deep reinforcement learning-based trajectory optimization and resource allocation for secure UAV-enabled MEC networks[C]. IEEE Conference on Computer Communications Workshops, Vancouver, Canada, 2024: 1–5. doi: 10.1109/INFOCOMWKSHPS61880.2024.10620895. [13] WANG Jiawei and SUN Haifeng. Joint resource allocation and trajectory optimization for computation offloading in UAV-enabled mobile edge computing[C]. 2024 6th International Conference on Communications, Information System and Computer Engineering, Guangzhou, China, 2024: 302–307. doi: 10.1109/CISCE62493.2024.10653394. [14] HU Bintao, ISAAC M, AKINOLA O M, et al. Federated learning empowered resource allocation in UAV-assisted edge intelligent systems[C]. 2023 IEEE 3rd International Conference on Computer Communication and Artificial Intelligence, Taiyuan, China, 2023: 336–341. doi: 10.1109/CCAI57533.2023.10201325. [15] YIN Sixing and YU F R. Resource allocation and trajectory design in UAV-aided cellular networks based on multiagent reinforcement learning[J]. IEEE Internet of Things Journal, 2022, 9(4): 2933–2943. doi: 10.1109/JIOT.2021.3094651. [16] PENG Sicong, LI Bin, LIU Lei, et al. Trajectory design and resource allocation for multi-UAV-assisted sensing, communication, and edge computing integration[J]. IEEE Transactions on Communications, 2025, 73(4): 2847–2861. doi: 10.1109/TCOMM.2024.3478115. [17] AL-HOURANI A, KANDEEPAN S, and LARDNER S. Optimal LAP altitude for maximum coverage[J]. IEEE Wireless Communications Letters, 2014, 3(6): 569–572. doi: 10.1109/LWC.2014.2342736. [18] XIE Hao, ZHANG Tiankui, XU Xiaoxia, et al. Joint sensing, communication, and computation in UAV-assisted systems[J]. IEEE Internet of Things Journal, 2024, 11(18): 29412–29426. doi: 10.1109/JIOT.2024.3362937. [19] MCMAHAN B, MOORE E, RAMAGE D, et al. Communication-efficient learning of deep networks from decentralized data[C]. Proceedings of the 20th International Conference on Artificial Intelligence and Statistics, Fort Lauderdale, USA, 2017: 1273–1282. [20] ISMAIL M and LE Longbao. Computation offloading and resource allocation for deep neural network inference in UAV wireless networks[C]. IEEE International Conference on Communications, Montreal, Canada, 2025: 832–837. doi: 10.1109/ICC52391.2025.11161364. [21] WANG Die, JIA Yunjian, LIANG Liang, et al. Resource allocation in blockchain integration of UAV-enabled MEC networks: A stackelberg differential game approach[J]. IEEE Transactions on Services Computing, 2024, 17(6): 4197–4210. doi: 10.1109/TSC.2024.3418330. [22] CAO Xiaolan, YAN Feng, XIA Weiwei, et al. DDQN based adaptive multi-channel MAC protocol for UAV ad-hoc networks[C]. 2024 10th International Conference on Computer and Communications, Chengdu, China, 2024: 1680–1685. doi: 10.1109/ICCC62609.2024.10942236. -

 下载:
下载:


图(8) / 表(1)
计量
- 文章访问数: 662
- HTML全文浏览量: 357
- PDF下载量: 67
- 被引次数: 0
