

Research on Time Slots Aggregation and Topology Aggregation Model for Unmanned Aerial Vehicle Swarm Overall Time Synchronization
-
摘要: 无人机(UAV)集群能够实现单平台无法完成的复杂任务,各节点之间的精密时间同步是无人机集群完成资源调度、协同定位以及数据融合的重要基础。随着UAV集群规模越来越大,UAV集群编队飞行中节点之间的时间比对链路连通性具有明显的时变特性,对连续、可靠的高精度时间同步实现提出了挑战。面向UAV集群全部节点的领导跟随一致性时间同步(LFCTS),该文提出观测时隙聚合(OTSA)模型和时变拓扑聚合(TVTA)模型,并进行了误差建模与仿真分析。OTSA模型通过系统时间同步周期内多个时隙同步样本的有效利用,可有效提升全局时间同步的鲁棒性和时间同步精度,实现的同步精度优于2.56 ns,性能优于传统的分时比对同步体制。TVTA模型通过跨周期时间同步链路状态聚合和中继节点多跳时间同步措施,能够实现集群起飞集合、队形变换过程中的连续时间同步,典型的大规模集群全局同步的预测精度可优于8.60 ns,并基于小规模UAV集群飞行试验验正了模型的鲁棒性。所提方法能够为无人机集群的复杂协同应用提供必要保障。Abstract:
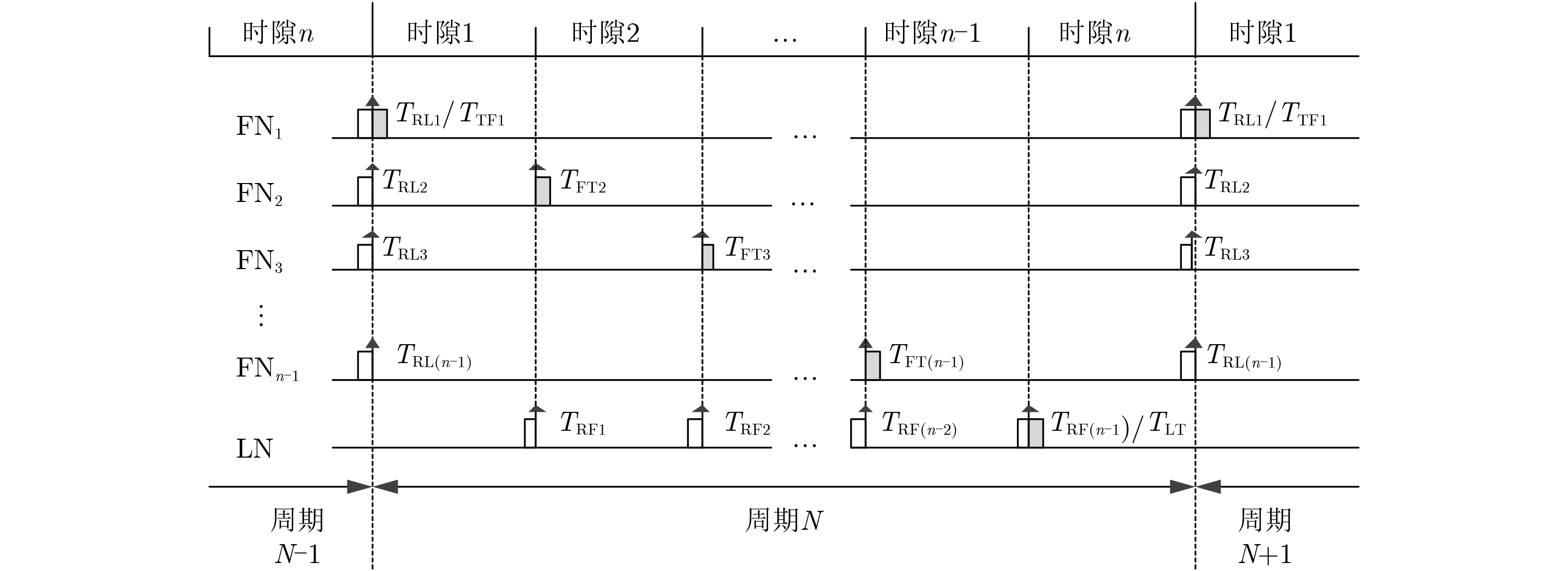
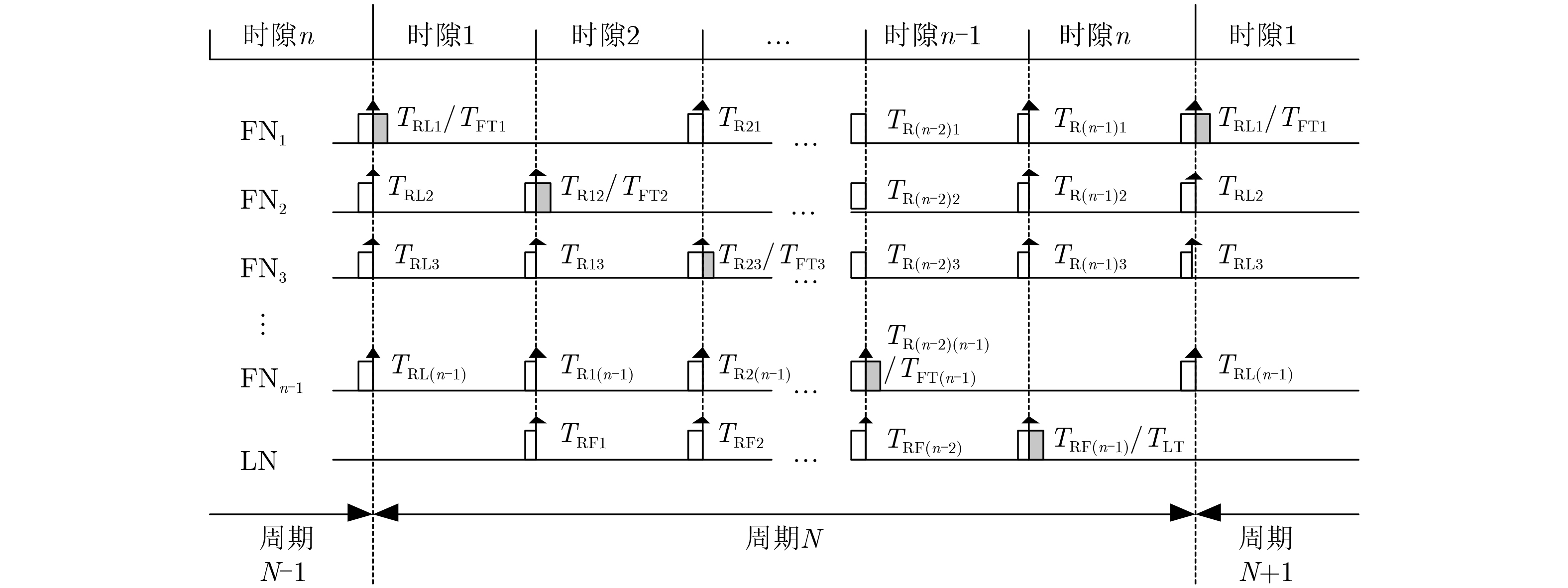
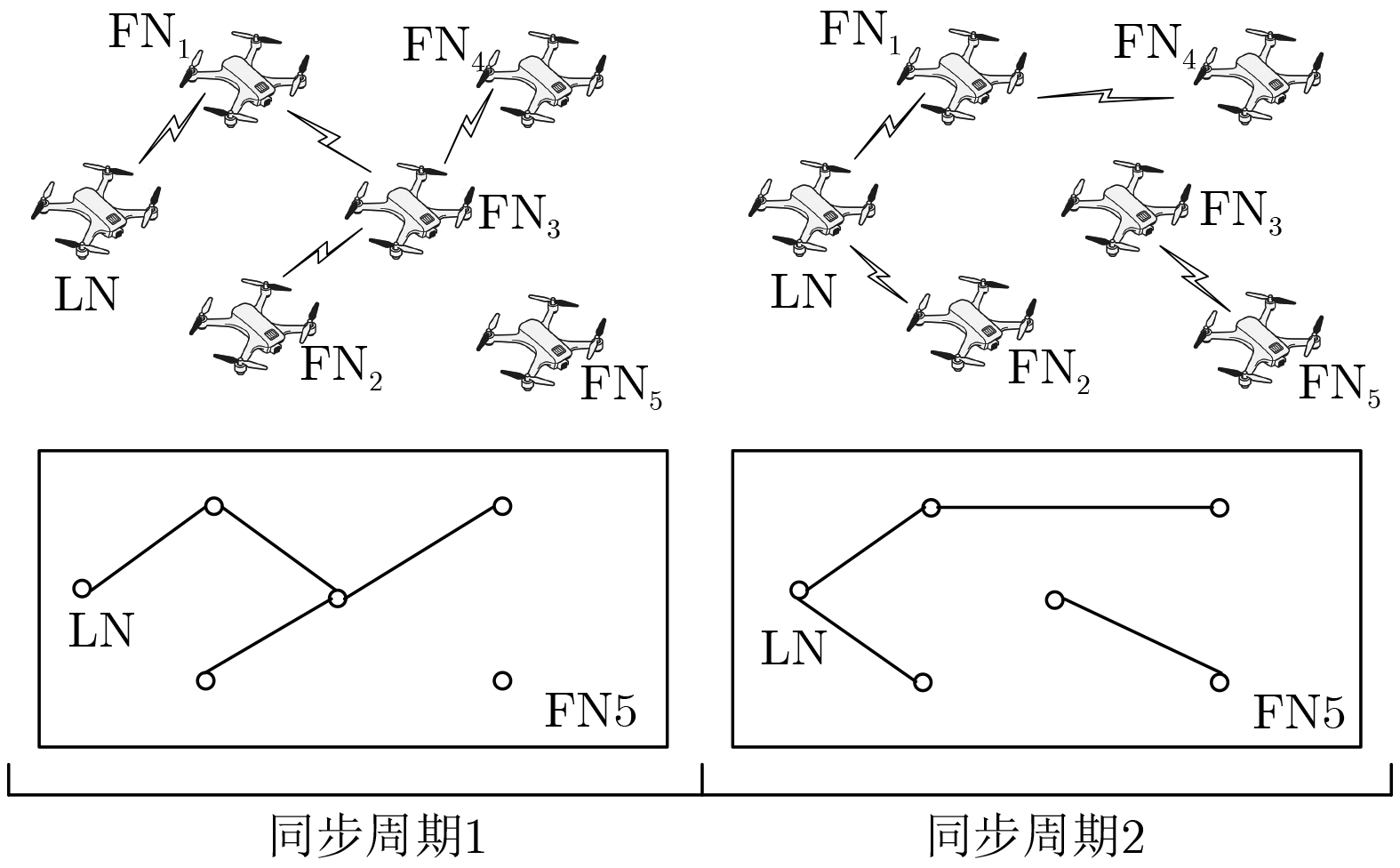
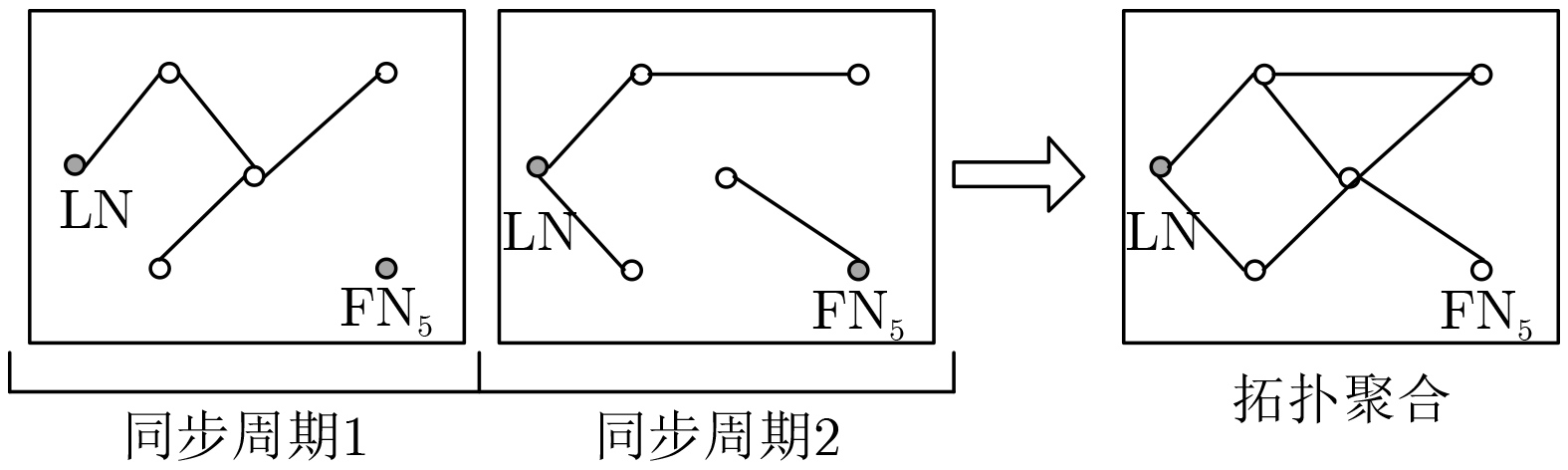
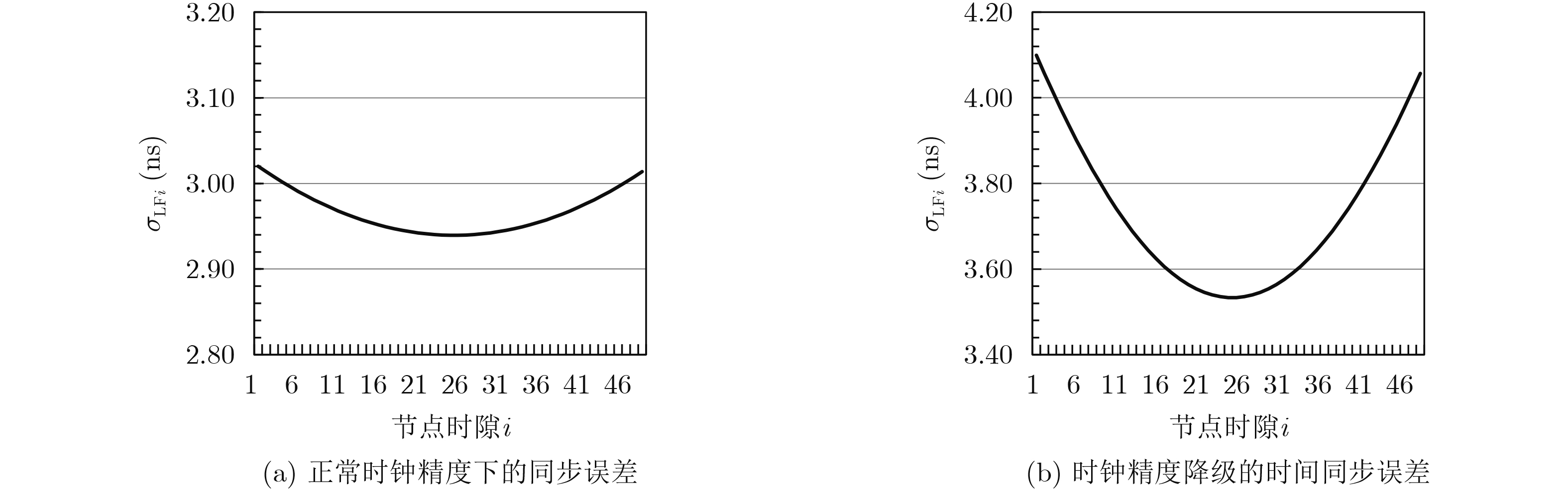
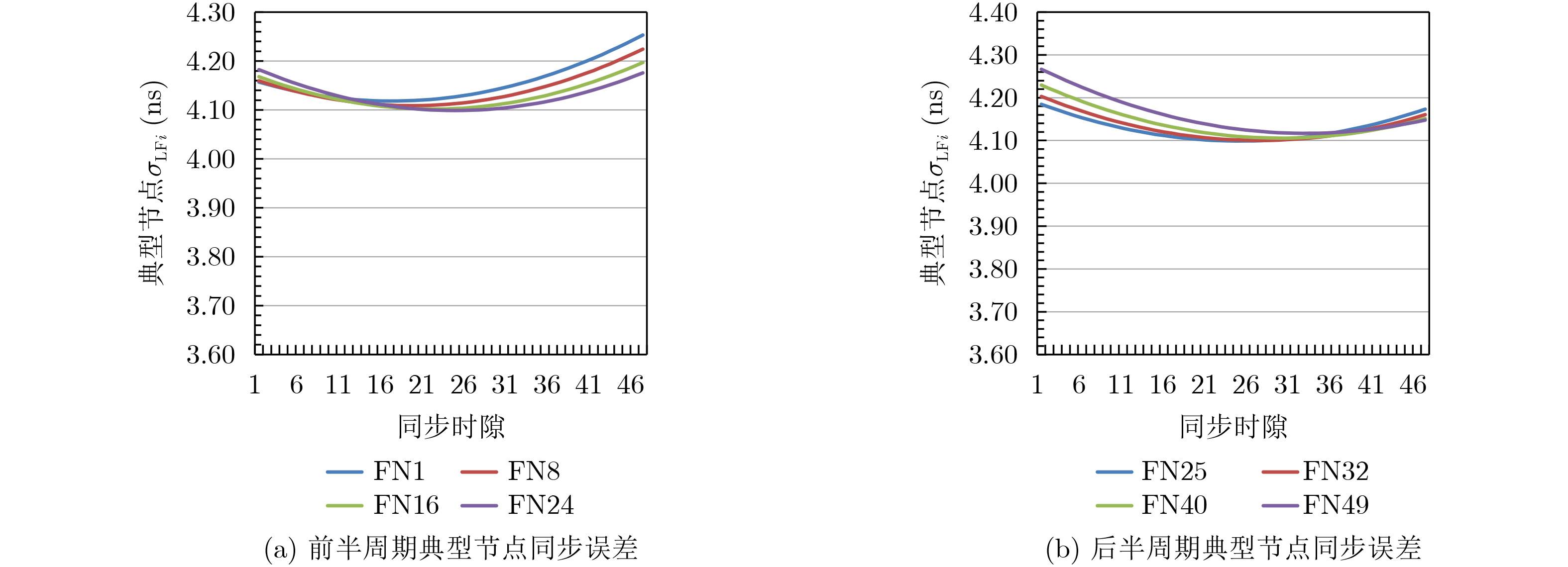
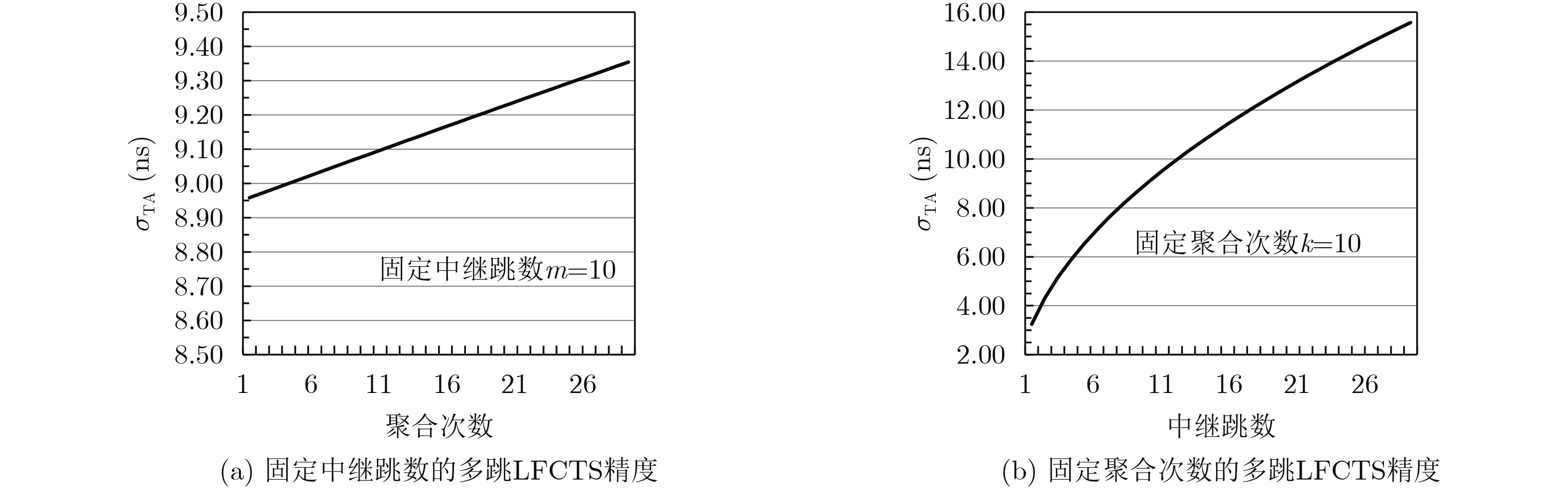
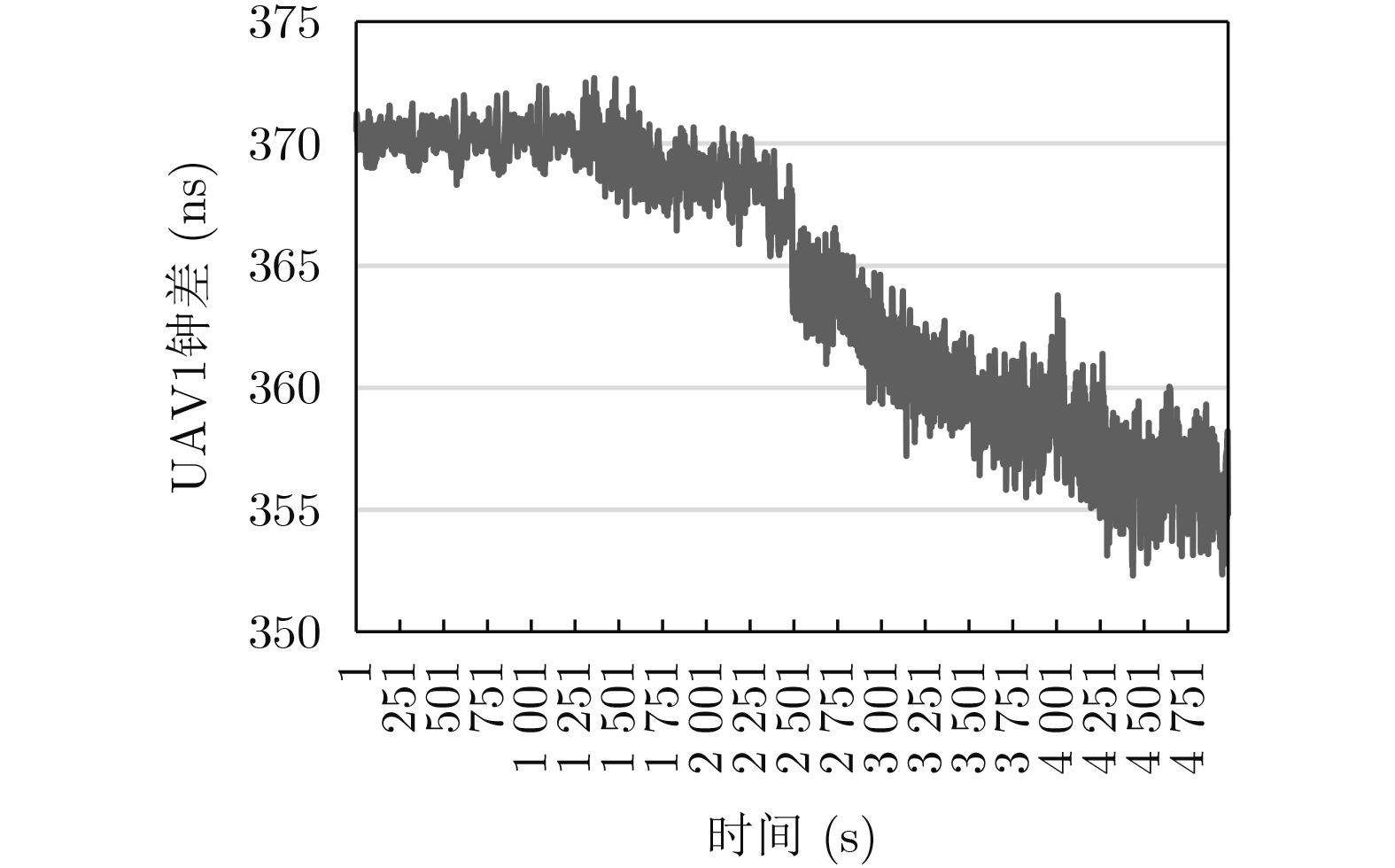
Objective Unmanned Aerial Vehicle (UAV) swarms overcome the technical and performance limitations of individual UAVs and enable complex missions that cannot be accomplished by a single platform. High-precision time synchronization among swarm nodes serves as a fundamental requirement for key swarm operations, including resource scheduling, cooperative positioning, and multi-node data fusion. Existing research on UAV time synchronization mainly focuses on improving the accuracy of basic synchronization approaches. However, limitations remain in adapting to topological changes during swarm formation flights and in achieving global synchronization among multiple nodes. As the scale of UAV swarms increases, the connectivity of time-comparison links between nodes during formation flights exhibits clear time-varying characteristics. These characteristics create challenges for maintaining continuous, reliable, and precise overall time synchronization. To address stable formation flight and formation transformation scenarios in different mission stages of UAV swarms, an Observation Time Slots Aggregation (OTSA) model and a Time-Varying Topology Aggregation (TVTA) model are proposed to enhance the robustness of global time synchronization among swarm nodes and to improve Time Synchronization Accuracy (TSA). This study proposes an effective solution for Leader-Following Consistency Time Synchronization (LFCTS) in UAV swarms and provides references for time synchronization applications in heterogeneous and distributed systems. Methods Compared with the traditional Quasi Real-time Bidirectional Time Comparison (QRBTC) scheme, the time synchronization method based on the OTSA model fully uses all synchronization signal transmission and reception link resources within each time slot of the system synchronization period. Based on the “one transmission and multiple receptions” mechanism of all nodes, the Follower Node (FN) performs direct synchronization or single-hop indirect synchronization with the Leader Node (LN) in each time slot according to the OTSA model. This process produces tens of times more clock-skew observation samples than the traditional QRBTC scheme. The OTSA method improves the robustness of global time synchronization. It also enables secondary data processing using multi-slot synchronization samples, which further improves TSA compared with the QRBTC method. Based on the LFCTS results obtained during the system signal synchronization period, the TVTA model extends the direct comparison and single-hop indirect comparison mechanism of the OTSA model to cross-period multi-hop comparison. This extension addresses overall time synchronization instability caused by the time-varying characteristics of synchronization link relationships during UAV swarm takeoff, assembly, and formation transformation. Results and Discussions In the OTSA method, all time-comparison link resources of the total time slots are fully used during the synchronization period ( Fig. 2 ). Based on the constructed error model and simulation analysis, for a UAV swarm with 50 nodes and a time slot allocation of 20 ms, time synchronization using the OTSA model achieves a single-slot TSA of 4.10~4.27 ns (Fig. 6 ). Within a complete time synchronization period, the overall TSA reaches 2.46~2.56 ns, which is better than the QRBTC scheme under the same conditions (Fig. 5(a) ). The TVTA method uses cross-period synchronization comparison relationships to construct multi-hop time comparison links (Fig. 3 and4 ). When the FN obtains external comparison relationships of other nodes through aggregation processing, one-way or two-way Dijkstra’s algorithm is applied to determine the multi-hop comparison link with optimal connectivity. Time tracing and comparison with the LN are then completed through edge computing. Error analysis indicates that during UAV swarm takeoff, assembly, and transitions to triangle or rhombus formations, time synchronization based on the TVTA model achieves an overall TSA better than 8.6 ns, which provides stronger global time synchronization capability.Conclusions This study addresses the robustness of time synchronization in UAV swarm formation flights. For stable formation flight and formation transformation scenarios during different mission stages, the OTSA and TVTA models are proposed. An error model is constructed and performance is analyzed. The results show the following. (1) The OTSA model improves the robustness of overall time synchronization through direct comparison and single-hop indirect comparison across multiple time slots within one synchronization period. The model achieves an overall TSA better than 2.56 ns and performs better than the traditional QRBTC method. (2) The TVTA model achieves overall UAV swarm time synchronization through multi-hop relay between nodes. Even when time-comparison links change, the model maintains global TSA better than 8.6 ns. (3) These two methods consider the time-varying characteristics of comparison links among UAV swarm nodes and have been verified through small-scale UAV swarm flight tests. They maintain synchronization robustness and performance and provide necessary support for coordinated UAV swarm operations. Future work will focus on practical flight verification, adaptation in complex scenarios, and further improvement of overall synchronization accuracy. -
[1] 王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 023732. doi: 10.7527/S1000-6893.2019.23732.WANG Xiangke, LIU Zhihong, CONG Yirui, et al. Miniature fixed-wing UAV swarms: Review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 023732. doi: 10.7527/S1000-6893.2019.23732. [2] 尹建凤, 张庆君, 刘杰, 等. 国外编队飞行干涉SAR卫星系统发展综述[J]. 航天器工程, 2018, 27(1): 116–122. doi: 10.3969/j.issn.1673-8748.2018.01.016.YIN Jianfeng, ZHANG Qingjun, LIU Jie, et al. A review on development of formation flying interferometric SAR satellite system[J]. Spacecraft Engineering, 2018, 27(1): 116–122. doi: 10.3969/j.issn.1673-8748.2018.01.016. [3] 李沛洲, 杨勇, 李术, 等. 时频同步误差影响双基地SAR成像效果的仿真系统设计[J]. 电讯技术, 2024, 64(11): 1826–1835. doi: 10.20079/j.issn.1001-893x.230830002.LI Peizhou, YANG Yong, LI Shu, et al. Design of a simulation system for evaluating the influence of time-frequency synchronization error on the imaging effect of Bistatic SAR[J]. Telecommunication Engineering, 2024, 64(11): 1826–1835. doi: 10.20079/j.issn.1001-893x.230830002. [4] DOU Jie, XU Bing, and DOU Lei. Impact assessment of the asynchronous clocks between reference and user receivers in differential pseudolite navigation system[J]. IEEE Sensors Journal, 2021, 21(1): 403–411. doi: 10.1109/JSEN.2020.3014103. [5] 高宏, 邓志鑫, 王立兵, 等. 空基导航区域增强系统覆盖范围分析[J]. 无线电工程, 2017, 47(2): 45–47, 56. doi: 10.3969/j.issn.1003-3106.2017.02.11.GAO Hong, DENG Zhixin, WANG Libing, et al. Coverage analysis of air-based regional augmentation system for BD satellite navigation signal[J]. Radio Engineering, 2017, 47(2): 45–47, 56. doi: 10.3969/j.issn.1003-3106.2017.02.11. [6] 汤新民, 周杨, 鲁其兴, 等. 基于信号到达时间建模的广域多点定位时间同步方法[J]. 电子与信息学报, 2025, 47(5): 1434–1449. doi: 10.11999/JEIT240670.TANG Xinmin, ZHOU Yang, LU Qixing, et al. Wide-area multilateration time synchronization method based on signal arrival time modeling[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1434–1449. doi: 10.11999/JEIT240670. [7] 陈聪, 段柏宇, 徐强, 等. 无人机平台运动状态下节点间高精度时间同步[J]. 西安电子科技大学学报, 2024, 51(3): 19–29. doi: 10.19665/j.issn1001-2400.20231207.CHEN Cong, DUAN Baiyu, XU Qiang, et al. High precision time synchronization between nodes under motion scenario of UAV platforms[J]. Journal of Xidian University, 2024, 51(3): 19–29. doi: 10.19665/j.issn1001-2400.20231207. [8] WANG Zhenling, TAO Haihong, HAO Fang, et al. Eliminate dynamic error of A-PNAS high-precision time synchronization using multi-sensor combination[J]. Sensors, 2025, 25(19): 6028. doi: 10.3390/s25196028. [9] 张然, 刘春玲, 程珺炜, 等. 一种适用无人机集群的多段补偿时间同步算法[J]. 计算机仿真, 2021, 38(7): 327–330,474. doi: 10.3969/j.issn.1006-9348.2021.07.070.ZHANG Ran, LIU Chunling, CHENG Junwei, et al. A multi-stage compensation bidirectional time synchronization algorithm for UAV cluster[J]. Computer Simulation, 2021, 38(7): 327–330,474. doi: 10.3969/j.issn.1006-9348.2021.07.070. [10] LI Yong, SONG Chaoming, JIN Depeng, et al. A dynamic graph optimization framework for multihop device-to-device communication underlaying cellular networks[J]. IEEE Wireless Communications, 2014, 21(5): 52–61. doi: 10.1109/MWC.2014.6940433. [11] LIU Runzi, SHENG Min, LUI K S, et al. Capacity analysis of two-layered LEO/MEO satellite networks[C]. 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 2015: 1–5. doi: 10.1109/VTCSpring.2015.7145726. [12] WANG Haocheng, LIN Bin, HAN Xiaoling, et al. A maximum flow algorithm based on undirected storage time aggregated graph for unmanned surface vessel networks[C]. 2024 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Hangzhou, China, 2024: 840–844. doi: 10.1109/icccworkshops62562.2024.10693689. [13] WANG Gaifang, LI Bo, YANG Hongjuan, et al. An energy-efficient routing algorithm for UAV formation based on time-aggregated graph[J]. China Communications, 2024, 21(11): 28–39. doi: 10.23919/JCC.fa.2024-0214.202411. [14] 蔚保国, 鲍亚川, 魏海涛. 面向时间同步业务的空间信息网络拓扑聚合图模型[J]. 电子与信息学报, 2017, 39(12): 2929–2936. doi: 10.11999/JEIT170252.YU Baoguo, BAO Yachuan, and WEI Haitao. Time synchronization service oriented topology aggregation model of space information network[J]. Journal of Electronics & Information Technology, 2017, 39(12): 2929–2936. doi: 10.11999/JEIT170252. [15] GUO Mingming, WANG Feng, PENG Fei, et al. Design of distributed network clock-synchronization for swarm UAV[C]. 2020 International Conference on Computing and Data Science (CDS), Stanford, USA, 2020: 194–197. doi: 10.1109/CDS49703.2020.00046. [16] 瞿智, 王刚, 王天云, 等. 基于领导跟随一致性的卫星网络时频同步方法[J]. 宇航学报, 2025, 46(3): 589–600. doi: 10.3873/j.issn.1000-1328.2025.03.016.QU Zhi, WANG Gang, WANG Tianyun, et al. A time-frequency synchronization method for satellite networks based on leader-following consensus[J]. Journal of Astronautics, 2025, 46(3): 589–600. doi: 10.3873/j.issn.1000-1328.2025.03.016. [17] 赵建霞, 段海滨, 赵彦杰, 等. 基于鸽群层级交互的有人/无人机集群一致性控制[J]. 上海交通大学学报, 2020, 54(9): 973–980. doi: 10.16183/j.cnki.jsjtu.2020.146.ZHAO Jianxia, DUAN Haibin, ZHAO Yanjie, et al. Consensus control of manned-unmanned aerial vehicle swarm based on hierarchy interaction of pigeons[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 973–980. doi: 10.16183/j.cnki.jsjtu.2020.146. -

 下载:
下载:


图(8)
计量
- 文章访问数: 394
- HTML全文浏览量: 244
- PDF下载量: 36
- 被引次数: 0
