

Intelligent Unmanned Aerial Vehicles for Low-altitude Economy: A Review of the Technology Framework and Future Prospects
-
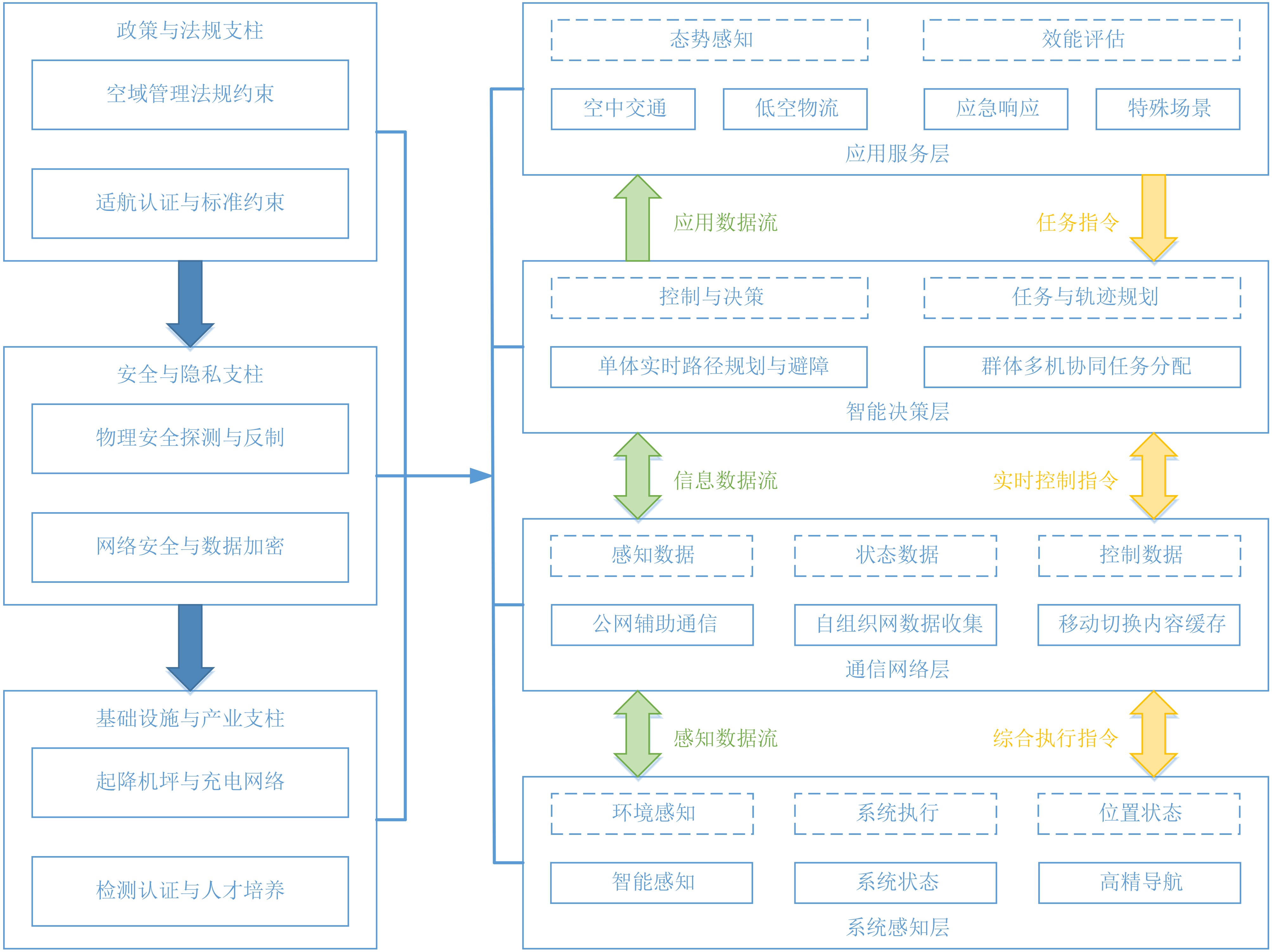
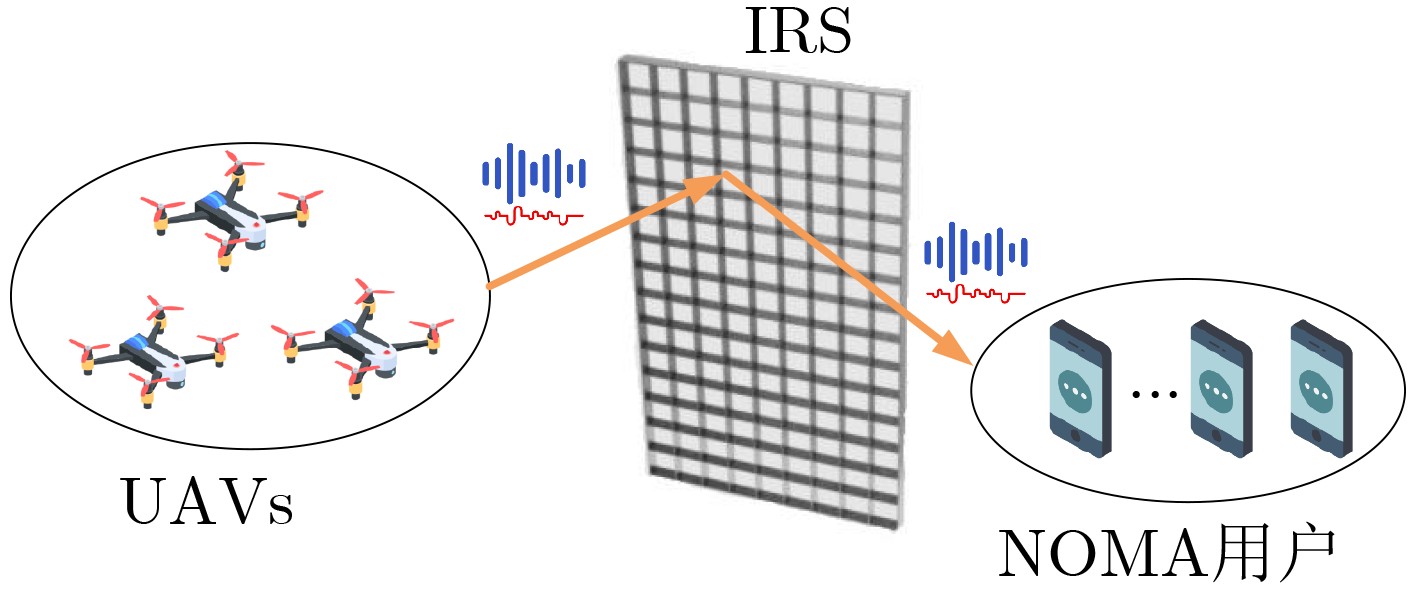
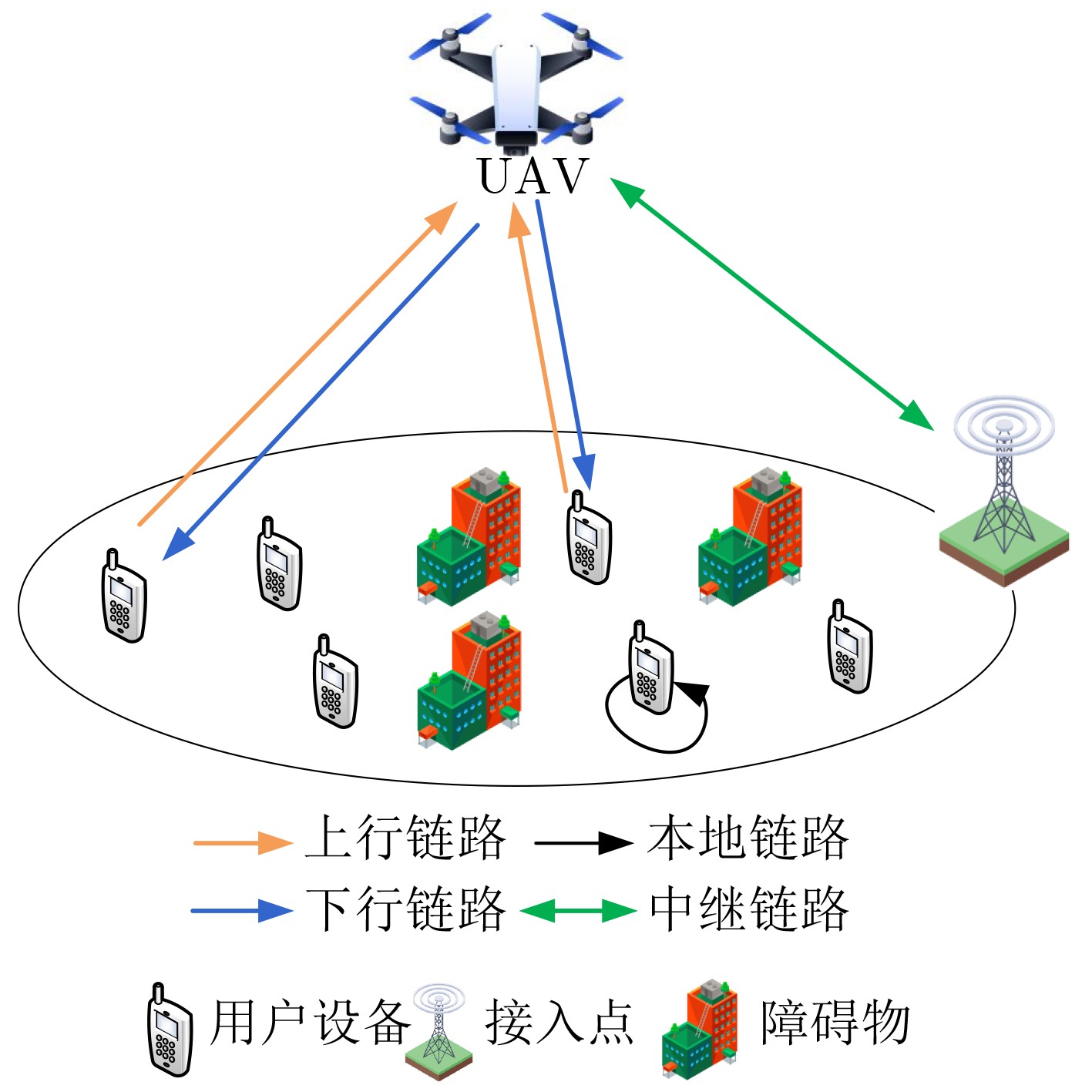
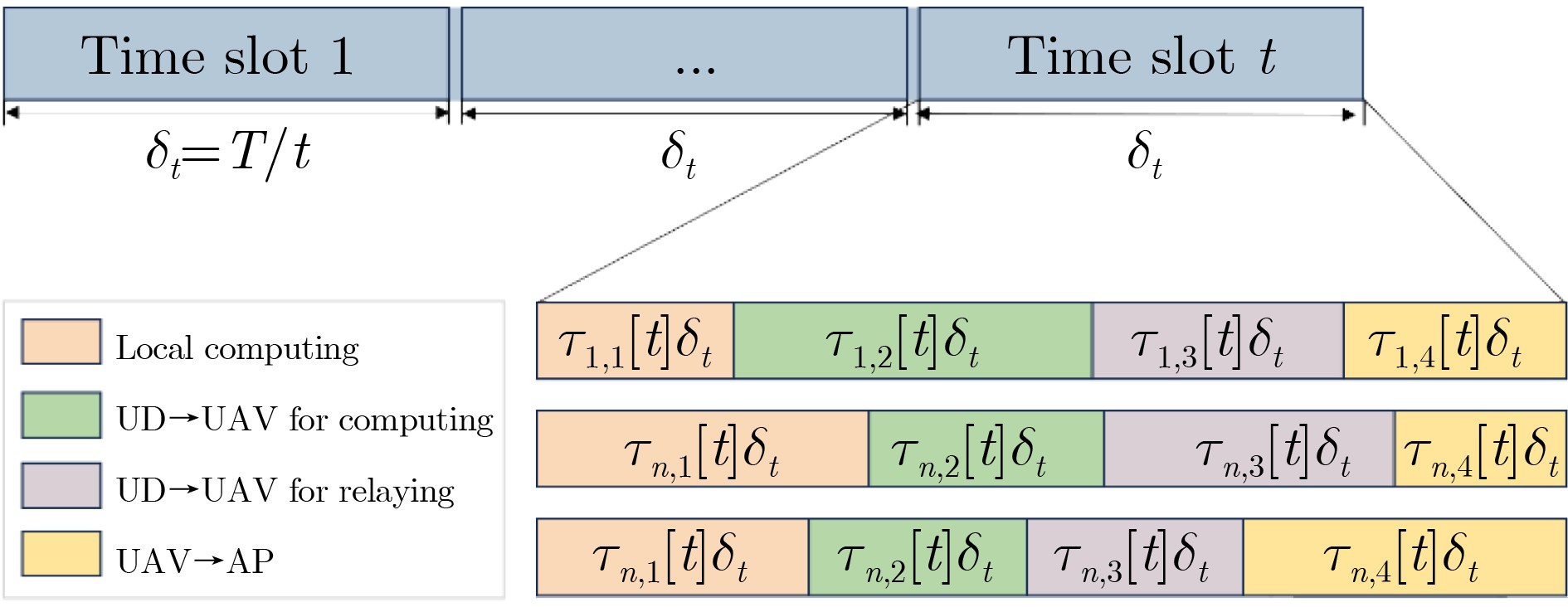
摘要: 随着新质生产力与数字经济的深度发展,低空经济作为融合通用航空、无人机物流和空中出行等形态的新型产业体系,正成为全球经济增长的新引擎。无人机凭借其高性价比、可扩展性与高度智能化,在其中扮演着核心赋能者角色。该文系统性梳理并构建了面向低空经济的智能无人机技术体系,该体系遵循从底层基础到顶层应用的逻辑,通过通信网络贯通“感知-决策-行动”闭环,总结了无人机在物流运输、城市空中交通、公共安全和工业巡检等典型场景中的应用模式。剖析了其在感知与定位、通信与组网、智能决策与控制及空域集成与安全4大领域的关键技术内涵;归纳低空无人机通信3大关键网络类型,即无人机与蜂窝网络深度融合网络、无人机自组织专用网络、无人机计算应用网络,并详细分析了智能反射面(IRS)辅助的非正交多址接入(NOMA)通信、自组网拓扑优化和移动边缘计算分别在3类网络中的核心作用。解析了无人机在可靠通信、智能感知、自主协同和能源动力等方面面临的技术挑战以及在空域管理、法规标准、商业模式与社会接受度方面的非技术挑战。展望智能全域通信、认知群体智能、高置信度自主安全及绿色可持续技术等未来融合发展趋势的同时,提出基于“挑战驱动-技术融合-体系构建-反馈迭代”的低空经济无人系统技术闭环演进范式,揭示了其发展内在逻辑是以应用为导向、具备自我优化能力的动态递归过程。Abstract:
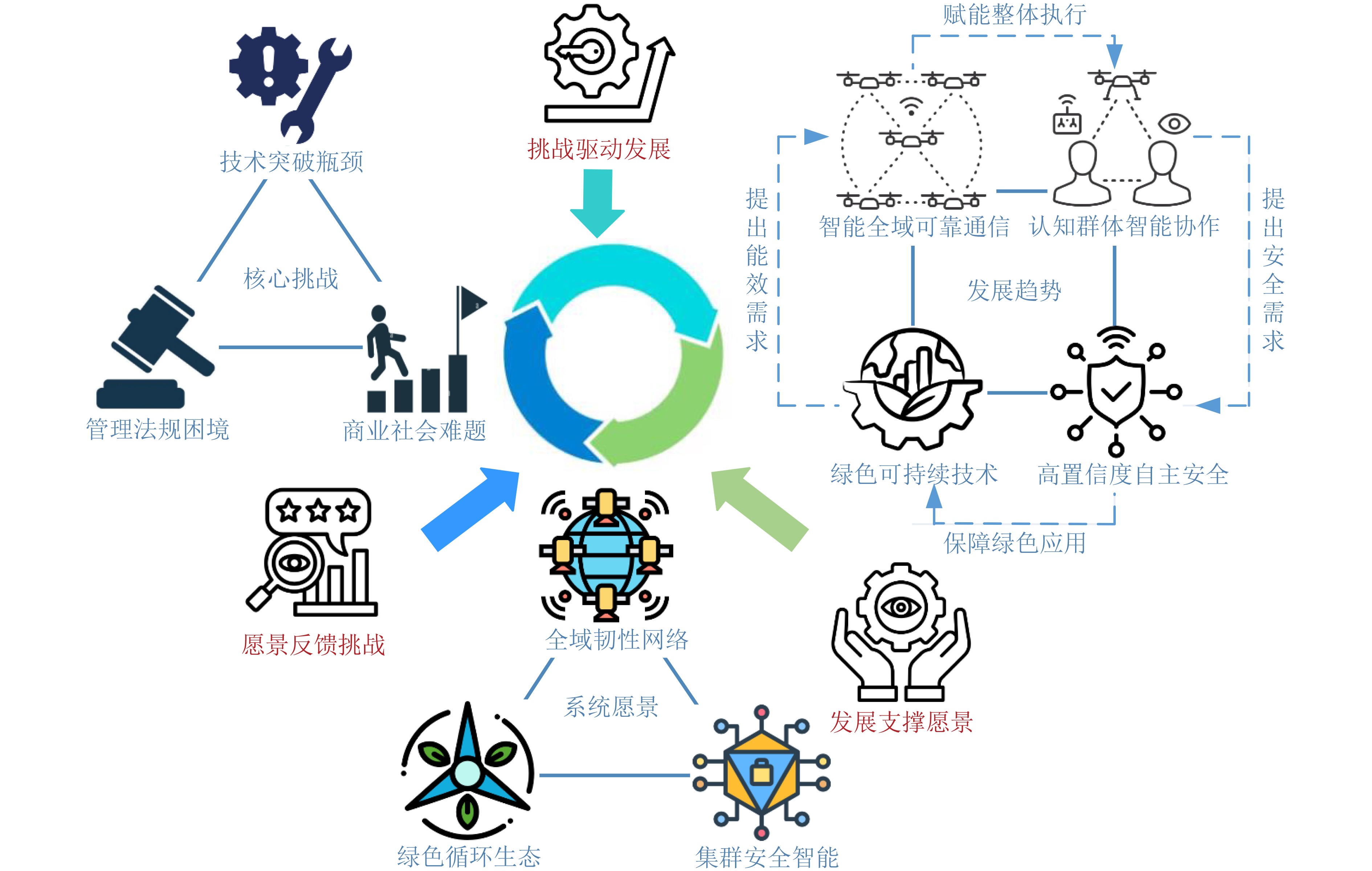
Significance The deep integration of new quality productive forces with the digital economy accelerates the development of the low-altitude economy and positions it as an emerging driver of global economic growth. Operating in airspace typically below 3 000 m, this industrial system supports diverse applications, including Unmanned Aerial Vehicle (UAV) logistics, Urban Air Mobility (UAM), industrial inspection, and public safety. Intelligent UAVs, characterized by cost efficiency, scalability, and autonomous capability, function as the core technical enabler of this ecosystem. Their deployment promotes a transition in aviation from centralized and isolated operation modes toward distributed, intelligent, and service-oriented aerial utilization. From a strategic perspective, intelligent UAVs contribute to industrial upgrading, urban infrastructure improvement, airspace security assurance, and regional economic development. Therefore, a systematic review and structured construction of an intelligent UAV technology framework is necessary to support future research, clarify key challenges, and promote sustained development of the low-altitude economy. Progress A holistic technology framework for intelligent UAVs is constructed, organized hierarchically from foundational technologies to application-oriented systems. The framework integrates four interrelated domains. Intelligent perception and navigation emphasize stable operation in complex environments through tightly coupled multi-sensor fusion and advanced state estimation methods, such as visual-inertial odometry, supported by multi-source adaptive positioning in Global Navigation Satellite System (GNSS)-denied scenarios. Wireless communication networks focus on reliable Beyond-Visual-Line-Of-Sight (BVLOS) connectivity by combining cellular network access, self-organizing flying ad hoc networks (FANETs) with intelligent topology control, and UAV-assisted edge computing for efficient resource scheduling. Autonomous decision-making and cooperative control evolve from classical rule-based approaches toward learning-based paradigms, where multi-agent reinforcement learning enables coordinated swarm behavior and adaptive task execution. Low-altitude security and airspace management provide essential system support through integrated detection and countermeasure technologies, supplemented by UAV cloud platforms and Unmanned aircraft system Traffic Management (UTM) for coordinated airspace operation. Conclusions The review indicates that UAVs are transitioning from isolated platforms to interconnected intelligent nodes embedded within the low-altitude economy system. Although substantial progress has been achieved across multiple technological domains, several critical challenges remain. Major technical constraints include maintaining communication reliability in complex low-altitude channels, addressing perception degradation in cluttered or deceptive environments, achieving robust autonomous cooperation under uncertainty, and overcoming the inherent limitations of existing energy and power technologies. These technical issues coexist with non-technical barriers, such as the establishment of adaptive regulatory and airspace governance frameworks, the formation of scalable and sustainable business models, and the enhancement of public acceptance. The analysis suggests that addressing these challenges requires deep integration of enabling technologies. A closed-loop evolution paradigm of “challenge-driven → technology fusion → system construction → feedback iteration” is proposed to describe the intrinsic iterative logic of technological development and to provide methodological guidance for future research and engineering practice. Prospects Future intelligent UAV development is expected to concentrate on several strongly coupled directions. Intelligent holistic communication will advance through deep integration of air-ground-space networks and Integrated Sensing And Communication (ISAC), forming a proactive data environment that supports predictive resource management and resilient connectivity. Cognitive swarm intelligence will promote the transformation of UAV clusters into cooperative cognitive systems by combining large language models for task comprehension with multi-agent reinforcement learning for decentralized decision-making, enabling emergent collective intelligence. High-assurance autonomous security will rely on formal verification of artificial intelligence models, explainable decision mechanisms, and extensive application of digital twins for virtual validation and certification, thereby strengthening operational trust. In parallel, green and sustainable technologies will influence the full lifecycle of UAV systems, encouraging advances in high-energy-density power solutions, including solid-state batteries and hydrogen fuel cells, the use of environmentally friendly materials, and artificial intelligence-based optimization of energy consumption and acoustic performance, which together support the long-term sustainability of the low-altitude economy. -
表 1 低空经济中无人机的典型应用场景与技术总结
应用场景 描述 关键技术 商业模式 面临挑战 代表案例/试点 低空物流与运输 快递配送、医疗急救物资运输、跨海湾/山区运输等,强调高效、低成本的货物移动 自主导航与路径规划、电池与
动力管理、感知与避障、货物
装载/卸载系统、通信链路B2B(如物流公司合作)、B2C(直
接配送服务)空域管理、电池续航、天气适应性、法规合规 美团无人机配送(深圳)、Zipline(卢旺达/美国)
医疗物资空投项目城市空中
交通聚焦eVTOL与载人级无人机的运营,实现城市内短途客运
或货运垂直起降、轻量化材料、
电动推进系统、安全与认证
标准、空中交通管理共享出行服务、城市交通网络
集成安全性认证、
噪音控制、
基础设施建设亿航EH216-S,Joby Aviation(美国) 城市
空中交通测试项目公共安全与应急响应 应用于消防救援、警务巡逻、
灾害勘测与救援,提升响应
速度与情景感知能力实时视频传输、热成像与多光谱传感器、多机协同控制、快速部署机制、数据融合分析 政府采购、
公共服务合作应急通信可靠性、恶劣环境
适应性、数据
隐私与安全深圳“医疗急救走廊”
无人机送血项目、澳大利亚西太平洋海域“无人机
救援”项目工业巡检与农林牧渔 涵盖电力/油气管道巡检、
大型基础设施监测、精准农业,
优化资源利用与维护效率多光谱/LiDAR传感、自动巡检算法、数据分析与AI、长效
续航技术、高精度定位订阅服务(如应
用监测)、项目
合同(工业巡检)数据准确性、
操作自动化程度、
成本效益平衡浙江电网无人机智能巡检
项目、极飞科技农业植保
无人机 下载: 导出CSV
下载: 导出CSV
表 2 无人机集群协同任务分配算法对比描述
典型算法 算法类别 算法描述 算法特征 穷举遍历
分支定界集中式优化类 构建最优化数学模型进行求解 问题表述程度有限、计算处理过程复杂、中心化依赖严重 粒子群算法
遗传算法集中式启发类 不断调节解质量,进行启发式优化 解算结果随机化程度过高、缺乏严格数学理论支撑、
中心化依赖严重、算法实现容易市场拍卖 分布式模拟类 将复杂任务映射至某场景,借助其运行方式解决问题 扩展性强、实现灵活、信息同步程度要求高 人工智能 分布式/集中式
马尔可夫决策将分配转移为动态决策解决问题 动态决策能力强、环境适应程度高、求解过程时间跨度长 群智能算法 分布式生物类 基于局部动态感知与变化,形成组织行为解决问题 解算结果随机化程度过高、缺乏严格数学理论支撑、
规模变化不敏感、算法实现容易
下载: 导出CSV
-
[1] WANG Yixian, SUN Geng, SUN Zemin, et al. Toward realization of low-altitude economy networks: Core architecture, integrated technologies, and future directions[J]. IEEE Transactions on Cognitive Communications and Networking, 2025, 11(5): 2788–2820. doi: 10.1109/TCCN.2025.3601015. [2] 国务院, 中央军委. 低空空域管理改革方案[Z]. 北京: 2010. State Council and Central Military Commission of the People’s Republic of China. Low altitude airspace management reform plan[Z]. Beijing, China, 2010. [3] 中国信息通信研究院. 低空经济白皮书(2024年)[R]. 北京: 中国信息通信研究院, 2024. China Academy of Information and Communications Technology (CAICT). White paper on low-altitude economy (2024)[R]. Beijing, China: China Academy of Information and Communications Technology, 2024. [4] World Economic Forum. Advanced air mobility: Shaping the future of aviation[R]. Davos: World Economic Forum, 2024. [5] National Aeronautics and Space Administration. UTM: Air traffic management for low-altitude drones[R]. Washington, DC: National Aeronautics and Space Administration, 2018. [6] NASA. Unmanned aircraft system traffic management concepts of operations V2.0[R]. Washington DC, 2020. [7] Japan Aerospace Exploration Agency. Roadmap for the application and technology development of UAVs[R]. Toyota, Japan, 2017. [8] 王俊潼, 包丹文, 周佳怡, 等. 低空空域规划研究现状与展望[J]. 航空学报, 2025, 46(11): 530879. doi: 10.7527/S1000-6893.2024.30879.WANG Juntong, BAO Danwen, ZHOU Jiayi, et al. Low-altitude airspace planning: A review and prospect[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 530879. doi: 10.7527/S1000-6893.2024.30879. [9] 张平, 陈岩, 吴超楠. 6G: 新一代移动通信技术发展态势及展望[J]. 中国工程科学, 2023, 25(6): 1–8. doi: 10.15302/J-SSCAE-2023.06.001.ZHANG Ping, CHEN Yan, and WU Chaonan. Six-generation mobile communication: Development trend and outlook[J]. Strategic Study of CAE, 2023, 25(6): 1–8. doi: 10.15302/J-SSCAE-2023.06.001. [10] WANG Linan and WEN Guanghui. Attitude estimation for rigid aircraft: A distributed finite-time complementary filter with multiple inertial measurement units[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 3004010. doi: 10.1109/TIM.2025.3612644. [11] 谷美颖, 李航, 张家伟, 等. 基于视觉的无人机定位与导航方法研究综述[J]. 电子学报, 2025, 53(3): 651–685. doi: 10.12263/DZXB.20240699.GU Meiying, LI Hang, ZHANG Jiawei, et al. A review of vision-based UAV localization and navigation methods[J]. Acta Electronica Sinica, 2025, 53(3): 651–685. doi: 10.12263/DZXB.20240699. [12] LI Yiyuan, CHEN Weiyi, FU Bing, et al. A distributed cooperative dynamic target search method for multi-UAV systems in complex adversarial environments[J]. IEEE Internet of Things Journal, 2025, 12(18): 38155–38171. doi: 10.1109/JIOT.2025.3585158. [13] CHENG Yuanxun, HU Qingsong, GAO Wenjie, et al. Environment-aware IoT UAV channel prediction: A multiparameter prediction case using multimodal sensing data[J]. IEEE Internet of Things Journal, 2025, 24(12): 53410–53426. doi: 10.1109/JIOT.2025.3616151. [14] CHEN Xu, MA Chunguang, ZHAO Chaofan, et al. UAV classification based on deep learning fusion of multidimensional UAV micro-Doppler image features[J]. IEEE Geoscience and Remote Sensing Letters, 2024, 21: 3503205. doi: 10.1109/LGRS.2024.3371171. [15] MICLEA V C and NEDEVSCHI S. Dynamic semantically guided monocular depth estimation for UAV environment perception[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5605111. doi: 10.1109/TGRS.2023.3345475. [16] CHO E, KIM H, KIM P, et al. Obstacle avoidance of a UAV using fast monocular depth estimation for a wide stereo camera[J]. IEEE Transactions on Industrial Electronics, 2025, 72(2): 1763–1773. doi: 10.1109/TIE.2024.3429611. [17] QIN Tong, LI Peiliang, and SHEN Shaojie. VINS-mono: A robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004–1020. doi: 10.1109/TRO.2018.2853729. [18] FROSI M and MATTEUCCI M. ART-SLAM: Accurate real-time 6DoF LiDAR SLAM[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2692–2699. doi: 10.1109/LRA.2022.3144795. [19] CHEN Yu, XU Bo, WANG Bin, et al. GNSS reconstrainted visual–inertial odometry system using factor graphs[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: 8000305. doi: 10.1109/LGRS.2023.3236803. [20] SONG Boyi, YUAN Xianfeng, YING Zhongmou, et al. DGM-VINS: Visual–inertial SLAM for complex dynamic environments with joint geometry feature extraction and multiple object tracking[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 8503711. doi: 10.1109/TIM.2023.3280533. [21] DENG Min, HU Jiwei, WEN Junxiang, et al. Object detection based visual SLAM optimization method for dynamic scene[J]. IEEE Sensors Journal, 2025, 25(9): 16480–16488. doi: 10.1109/JSEN.2025.3552797. [22] CAO Zhengyang and CHEN Gang. Enhanced deep reinforcement learning for integrated navigation in multi-UAV systems[J]. Chinese Journal of Aeronautics, 2025, 38(8): 103497. doi: 10.1016/j.cja.2025.103497. [23] JIANG Yingying, ZHU Ni, and RENAUDIN V. A voting-based robust estimator aided by INS redundancy for tightly coupled GNSS/INS integration in urban environment[J]. IEEE Transactions on Vehicular Technology, 2025, 74(9): 13430–13445. doi: 10.1109/TVT.2025.3560363. [24] HU Gaoge, WANG Wei, ZHONG Yongmin, et al. A new direct filtering approach to INS/GNSS integration[J]. Aerospace Science and Technology, 2018, 77: 755–764. doi: 10.1016/j.ast.2018.03.040. [25] CANH T N, NGUYEN V T, HOANGVAN X, et al. S3M: Semantic segmentation sparse mapping for UAVs with RGB-D camera[C].2024 IEEE/SICE International Symposium on System Integration (SII), 2024, Ha Long, Vietnam, 2024: 899–905. doi: 10.1109/SII58957.2024.10417379. [26] ZHAI Rui and YUAN Yunbin. A method of vision aided GNSS positioning using semantic information in complex urban environment[J]. Remote Sensing, 2022, 14(4): 869. doi: 10.3390/rs14040869. [27] KANG Xu, WANG Dejiang, SHAO Yu, et al. An efficient hybrid multi-station TDOA and single-station AOA localization method[J]. IEEE Transactions on Wireless Communications, 2023, 22(8): 5657–5670. doi: 10.1109/TWC.2023.3235753. [28] LIU Qi, GAO Chengfa, SHANG Rui, et al. Hybrid GNSS+5G position and rotation estimation algorithm based on TOA and unit vector of arrival in urban environment[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 9512908. doi: 10.1109/TIM.2024.3427761. [29] CHEN Kai, LIANG Wenchao, and ZENG Chengzhi. Large-scale geomagnetic navigation for high-speed aircraft based on the gradient extraction neural network[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: 5921111. doi: 10.1109/TGRS.2025.3604619. [30] MENG Chen, HU Qinglei, GE S S, et al. Trusted multisource fusion navigation for UAV under GNSS interference and spoofing attacks[J]. IEEE/ASME Transactions on Mechatronics, 2025: 1–11. doi: 10.1109/TMECH.2025.3570315. [31] LI Zhen, TAO Jun, LEI Zhuo, et al. Factor graph optimization-based RTK/INS integration with raw observations for robust positioning in urban canyons[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 9523511. doi: 10.1109/TIM.2025.3577823. [32] 胡杨林, 张天魁, 李博, 等. 无人机使能的通信感知一体化组网与技术研究综述[J]. 电子与信息学报, 2025, 47(4): 859–875. doi: 10.11999/JEIT241116.HU Yanglin, ZHANG Tiankui, LI Bo, et al. A survey on UAV-enabled integrated sensing and communication networking and technologies[J]. Journal of Electronics & Information Technology, 2025, 47(4): 859–875. doi: 10.11999/JEIT241116. [33] LI Sixian, DUO Bin, YUAN Xiaojun, et al. Reconfigurable intelligent surface assisted UAV communication: Joint trajectory design and passive beamforming[J]. IEEE Wireless Communications Letters, 2020, 9(5): 716–720. doi: 10.1109/LWC.2020.2966705. [34] HUA Meng, YANG Luxi, WU Qingqing, et al. UAV-assisted intelligent reflecting surface symbiotic radio system[J]. IEEE Transactions on Wireless Communications, 2021, 20(9): 5769–5785. doi: 10.1109/TWC.2021.3070014. [35] HUA Meng, YANG Luxi, WU Qingqing, et al. 3D UAV trajectory and communication design for simultaneous uplink and downlink transmission[J]. IEEE Transactions on Communications, 2020, 68(9): 5908–5923. doi: 10.1109/TCOMM.2020.3003662. [36] MU Xidong, LIU Yuanwei, GUO Li, et al. Intelligent reflecting surface enhanced multi-UAV NOMA networks[J] IEEE Journal on Selected Areas in Communications, 2021, 39(10): 3051–3066. doi: 10.1109/JSAC.2021.3088679. [37] FANG Sisai, CHEN Gaojie, and LI Yonghui. Joint optimization for secure intelligent reflecting surface assisted UAV networks[J]. IEEE Wireless communications Letters, 2021, 10(2): 276–280. doi: 10.1109/LWC.2020.3027969. [38] CHEN Songchao, LIU Fang, and LIU Yuanan. Sum rate maximization for intelligent reflecting surface-assisted UAV-enabled NOMA network[J]. Electronics, 2023, 12(17): 3616. doi: 10.3390/electronics12173616. [39] ZHAO Bai, GUO Yan, XU Ba, et al. Combined UAV positioning with robust beamforming and IRS-enhanced NOMA transmission in cognitive UAV networks[J]. AEU-International Journal of Electronics and Communications, 2023, 168: 154727. doi: 10.1016/j.aeue.2023.154727. [40] SHAKHATREH H, SAWALMEH A, ALENEZI A H, et al. Mobile-IRS assisted next generation UAV communication networks[J]. Computer Communications, 2024, 215: 51–61. doi: 10.1016/j.comcom.2023.12.025. [41] ZHAO Yikun, ZHOU Fanqin, LIU Huaide, et al. PPO-based deployment and phase control for movable intelligent reflecting surface[J]. Journal of Cloud Computing, 2023, 12(1): 168. doi: 10.1186/s13677-023-00528-1. [42] ALAM M M, ARAFAT M Y, MOH S, et al. Topology control algorithms in multi-unmanned aerial vehicle networks: An extensive survey[J]. Journal of Network and Computer Applications, 2022, 207: 103495. doi: 10.1016/j.jnca.2022.103495. [43] 刘亚群, 谢钧, 邢长友, 等. 飞行自组网拓扑控制研究综述[J]. 通信学报, 2023, 44(8): 195–214. doi: 10.11959/j.issn.1000-436x.2023155.LIU Yaqun, XIE Jun, XING Changyou, et al. Comprehensive survey on topology control for flying ad-hoc network[J]. Journal on Communications, 2023, 44(8): 195–214. doi: 10.11959/j.issn.1000-436x.2023155. [44] GUO Qiang, YAN Jichen, and XU Wei. Localized fault tolerant algorithm based on node movement freedom degree in flying ad hoc networks[J]. Symmetry, 2019, 11(1): 106. doi: 10.3390/sym11010106. [45] LIU Yaqun, XIE Jun, XING Changyou, et al. Topology construction and topology adjustment in flying Ad hoc networks for relay transmission[J]. Computer Networks, 2023, 228: 109753. doi: 10.1016/j.comnet.2023.109753. [46] BASU P and REDI J. Movement control algorithms for realization of fault-tolerant ad hoc robot networks[J]. IEEE Network, 2004, 18(4): 36–44. doi: 10.1109/MNET.2004.1316760. [47] LIU Chao and ZHANG Zhongshan. Towards a robust FANET: Distributed node importance estimation-based connectivity maintenance for UAV swarms[J]. Ad Hoc Networks, 2022, 125: 102734. doi: 10.1016/j.adhoc.2021.102734. [48] GAYDAMAKA A, SAMUYLOV A, MOLTCHANOV D, et al. Dynamic topology organization and maintenance algorithms for autonomous UAV swarms[J]. IEEE Transactions on Mobile Computing, 2024, 23(5): 4423–4439. doi: 10.1109/TMC.2023.3293034. [49] WANG Huibin, CHEN Ming, and WEI Xianglin. A k-hop constrained reachability based proactive connectivity maintaining mechanism of UAV swarm networks[J]. Journal of Internet Technology, 2023, 24(6): 1329–1341. doi: 10.53106/160792642023112406015. [50] TOSUN M, CABUK U C, HAYTAOGLU E, et al. DPkCR: Distributed proactive k-connectivity recovery algorithm for UAV-based MANETs[J]. IEEE Transactions on Reliability, 2024, 73(4): 1918–1932. doi: 10.1109/TR.2024.3370743. [51] SUN Wenbin, ZHAO Lei, YANG Xin, et al. Joint topology reconstruction and resource allocation for UAV-IoT networks[J]. IEEE Internet of Things Journal, 2024, 11(22): 36452–36464. doi: 10.1109/JIOT.2024.3406045. [52] ZHANG Le, DU Ye, XU Jinqi, et al. UAV-enabled IoT: Cascading failure model and topology-control-based recovery scheme[J]. IEEE Internet of Things Journal, 2024, 11(12): 22562–22577. doi: 10.1109/jiot.2024.3381735. [53] FU Luwei, ZHAO Zhiwei, MIN Geyong, et al. Towards accurate and low-cost path reconstruction in mobile UAV networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(11): 17279–17290. doi: 10.1109/TITS.2024.3408811. [54] 王侃, 曹铁林, 李旭杰, 等. 无人机辅助边缘计算网络轨迹规划与资源分配研究综述[J]. 电子与信息学报, 2025, 47(5): 1266–1281. doi: 10.11999/JEIT241071.WANG Kan, CAO Tielin, LI Xujie, et al. A survey on trajectory planning and resource allocation in unmanned aerial vehicle-assisted edge computing networks[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1266–1281. doi: 10.11999/JEIT241071. [55] DENG Yiqin, CHEN Zhigang, CHEN Xianhao, et al. Task offloading in multi-hop relay-aided multi-access edge computing[J]. IEEE Transactions on Vehicular Technology, 2023, 72(1): 1372–1376. doi: 10.1109/TVT.2022.3204398. [56] KUANG Zhufang, PAN Yihui, YANG Fan, et al. Joint task offloading scheduling and resource allocation in air–ground cooperation UAV-enabled mobile edge computing[J]. IEEE Transactions on Vehicular Technology, 2024, 73(4): 5796–5807. doi: 10.1109/TVT.2023.3334143. [57] WANG Xiong, YE Jiancheng, and LIU J C S. Online learning aided decentralized multi-user task offloading for mobile edge computing[J]. IEEE Transactions on Mobile Computing, 2024, 23(4): 3328–3342. doi: 10.1109/TMC.2023.3275851. [58] 王义君, 李嘉欣, 闫志颖, 等. 基于深度强化学习的移动边缘计算安全传输策略研究[J]. 通信学报, 2025, 46(4): 272–281. doi: 10.11959/j.issn.1000-436x.2025060.WANG Yijun, LI Jiaxin, YAN Zhiying, et al. Research on secure transport strategy of mobile edge computing based on deep reinforcement learning[J]. Journal on Communications, 2025, 46(4): 272–281. doi: 10.11959/j.issn.1000-436x.2025060. [59] ZHOU Lei, CHEN Ying, LI Kaixin, et al. Stackelberg-game-based computation offloading in urban IoT systems with AAV-assisted multiaccess edge computing[J]. IEEE Internet of Things Journal, 2025, 12(7): 8178–8191. doi: 10.1109/JIOT.2024.3505143. [60] ZHANG Jianshan, LUO Haibo, CHEN Xing, et al. Minimizing response delay in UAV-assisted mobile edge computing by joint UAV deployment and computation offloading[J]. IEEE Transactions on Cloud Computing, 2024, 12(4): 1372–1386. doi: 10.1109/TCC.2024.3478172. [61] WANG Boxiong, KANG Hui, LI Jiahui, et al. AAV-assisted joint mobile edge computing and data collection via matching-enabled deep reinforcement learning[J]. IEEE Internet of Things Journal, 2025, 12(12): 19782–19800. doi: 10.1109/JIOT.2025.3542025. [62] CHEN Haosheng, CUI Haixia, WANG Jiahuan, et al. Computation offloading optimization for UAV-based cloud-edge collaborative task scheduling strategy[J]. IEEE Transactions on Cognitive Communications and Networking, 2025, 11(6): 4240–4253. doi: 10.1109/TCCN.2025.3544822. [63] CHEN Zhuoyue, YANG Yaozong, XU Jiajie, et al. Task offloading and resource pricing based on game theory in UAV-assisted edge computing[J]. IEEE Transactions on Services Computing, 2025, 18(1): 440–452. doi: 10.1109/TSC.2024.3512936. [64] JI Jiequ, ZHU Kun, NIYATO D, et al. Joint cache placement, flight trajectory, and transmission power optimization for multi-UAV assisted wireless networks[J]. IEEE Transactions on Wireless Communications, 2020, 19(8): 5389–5403. doi: 10.1109/TWC.2020.2992926. [65] ZHANG Mingze, EI-HAJJAR M, and NG S X. Intelligent caching in UAV-aided networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(1): 739–752. doi: 10.1109/TVT.2021.3125396. [66] ZHOU Fasheng, WANG Ning, LUO Gaoyong, et al. Edge caching in multi-UAV-enabled radio access networks: 3D modeling and spectral efficiency optimization[J]. IEEE Transactions on Signal and Information Processing over Networks, 2020, 6: 329–341. doi: 10.1109/TSIPN.2020.2986360. [67] WEI Qing, CHEN Yingyang, JIA Ziye, et al. Energy-efficient caching and user selection for resource-limited SAGINs in emergency communications[J]. IEEE Transactions on Communications, 2025, 73(6): 4121–4136. doi: 10.1109/TCOMM.2024.3511958. [68] LI Xuanheng, LIU Jiahong, CHEN Xianhao, et al. Caching on the sky: A multiagent federated reinforcement learning approach for UAV-assisted edge caching[J]. IEEE Internet of Things Journal, 2024, 11(17): 28213–28226. doi: 10.1109/JIOT.2024.3401219. [69] LIU Yinan, YANG Chao, CHEN Xin, et al. Joint hybrid caching and replacement scheme for UAV-assisted vehicular edge computing networks[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 866–878. doi: 10.1109/TIV.2023.3323217. [70] ZHOU Ruiting, HUANG Yifeng, WANG Yufeng, et al. User preference oriented service caching and task offloading for UAV-assisted MEC networks[J]. IEEE Transactions on Services Computing, 2025, 18(2): 1097–1109. doi: 10.1109/TSC.2025.3536319. [71] YANG Die, ZHAN Cheng, YANG Yang, et al. Integrating UAVs and D2D communication for MEC network: A collaborative approach to caching and computation[J]. IEEE Transactions on Vehicular Technology, 2025, 74(6): 10041–10046. doi: 10.1109/TVT.2025.3540915. [72] MAALE G T, KUADEY N A E, ARAFAT Y, et al. Multi-task learning for UAV trajectory and caching with federated cloud-assisted knowledge distillation[J]. IEEE Transactions on Network and Service Management, 2025, 22(3): 2516–2533. doi: 10.1109/TNSM.2025.3547743. [73] SHEN K, SHIVGAN R, MEDINA J, et al. Multidepot drone path planning with collision avoidance[J]. IEEE Internet of Things Journal, 2022, 9(17): 16297–16307. doi: 10.1109/JIOT.2022.3151791. [74] SAEED R A, OMRI M, ABDEL-KHALEK S, et al. Optimal path planning for drones based on swarm intelligence algorithm[J]. Neural Computing and Applications, 2022, 34(12): 10133–10155. doi: 10.1007/s00521-022-06998-9. [75] JAYAWEERA H M P C and HANOUN S. Path planning of unmanned aerial vehicles (UAVs) in windy environments[J]. Drones, 2022, 6(5): 101. doi: 10.3390/drones6050101. [76] HUANG Xiongwei, LIU Yongping, HUANG Lizhen, et al. BIM-supported drone path planning for building exterior surface inspection[J]. Computers in Industry, 2023, 153: 104019. doi: 10.1016/j.compind.2023.104019. [77] YANMAZ E. Joint or decoupled optimization: Multi-UAV path planning for search and rescue[J]. Ad Hoc Networks, 2023, 138: 103018. doi: 10.1016/j.adhoc.2022.103018. [78] YANG Tongyao, YANG Fengbao, and LI Dingzhu. A new autonomous method of drone path planning based on multiple strategies for avoiding obstacles with high speed and high density[J]. Drones, 2024, 8(5): 205. doi: 10.3390/drones8050205. [79] GÜVEN İ and YANMAZ E. Multi-objective path planning for multi-UAV connectivity and area coverage[J]. Ad Hoc Networks, 2024, 160: 103520. doi: 10.1016/j.adhoc.2024.103520. [80] KIM M J, KANG T Y, and RYOO C K. Real-time path planning for unmanned aerial vehicles based on compensated Voronoi diagram[J]. International Journal of Aeronautical and Space Sciences, 2025, 26(1): 235–244. doi: 10.1007/s42405-024-00771-z. [81] WU Yu, GOU Jinzhan, HU Xinting, et al. A new consensus theory-based method for formation control and obstacle avoidance of UAVs[J]. Aerospace Science and Technology, 2020, 107: 106332. doi: 10.1016/j.ast.2020.106332. [82] XI Meng, WEN Jiabao, HE Jingyi, et al. An expert experience-enhanced security control approach for AUVs of the underwater transportation cyber-physical systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(9): 14086–14098. doi: 10.1109/TITS.2024.3524730. [83] YAN Ziwei, HAN Liang, LI Xiaoduo, et al. Event-Triggered formation control for time-delayed discrete-Time multi-Agent system applied to multi-UAV formation flying[J]. Journal of the Franklin Institute, 2023, 360(5): 3677–3699. doi: 10.1016/j.jfranklin.2023.01.036. [84] CHEN Hao, WANG Xiangke, SHEN Lincheng, et al. Formation flight of fixed-wing UAV swarms: A group-based hierarchical approach[J]. Chinese Journal of Aeronautics, 2021, 34(2): 504–515. doi: 10.1016/j.cja.2020.03.006. [85] TAO Canhui, ZHANG Ru, SONG Zhiping, et al. Multi-UAV formation control in complex conditions based on improved consistency algorithm[J]. Drones, 2023, 7(3): 185. doi: 10.3390/drones7030185. [86] ZHOU Jinlun, ZHANG Honghai, HUA Mingzhuang, et al. P-DRL: A framework for multi-UAVs dynamic formation control under operational uncertainty and unknown environment[J]. Drones, 2024, 8(9): 475. doi: 10.3390/drones8090475. [87] MANDAL P, ROY L P, and DAS S K. Topology control of drones using bio-inspired intelligent firefly-grasshopper algorithm for searching intruder unmanned aerial vehicle[J]. IETE Journal of Research, 2024, 70(3): 2269–2285. doi: 10.1080/03772063.2023.2191999. [88] ASCI M, DAGDEVIREN Z A, AKRAM V K, et al. Enhancing drone network resilience: Investigating strategies for k-connectivity restoration[J]. Computer Standards & Interfaces, 2025, 92: 103941. doi: 10.1016/j.csi.2024.103941. [89] WANG Yuanzhe, YUE Yufeng, SHAN Mao, et al. Formation reconstruction and trajectory replanning for multi-UAV patrol[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 719–729. doi: 10.1109/TMECH.2021.3056099. [90] GAO Chenyang, MA Jianfeng, LI Teng, et al. Hybrid swarm intelligent algorithm for multi-UAV formation reconfiguration[J]. Complex & Intelligent Systems, 2023, 9(2): 1929–1962. doi: 10.1007/s40747-022-00891-7. [91] HU Ye, CHEN Mingzhe, SAAD W, et al. Distributed multi-agent meta learning for trajectory design in wireless drone networks[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(10): 3177–3192. doi: 10.1109/JSAC.2021.3088689. [92] MORILLA-CABELLO D, BARTOLOMEI L, TEIXEIRA L, et al. Sweep-your-map: Efficient coverage planning for aerial teams in large-scale environments[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 10810–10817. doi: 10.1109/LRA.2022.3194686. [93] LIU Xinbin, WANG Ye, GAO Hui, et al. A coverage-aware task allocation method for UAV-assisted mobile crowd sensing[J]. IEEE Transactions on Vehicular Technology, 2024, 73(7): 10642–10654. doi: 10.1109/TVT.2024.3374719. [94] FAN Kexin, FENG Bowen, ZHANG Xilin, et al. Demand-driven task scheduling and resource allocation in space-air-ground integrated network: A deep reinforcement learning approach[J]. IEEE Transactions on Wireless Communications, 2024, 23(10): 13053–13067. doi: 10.1109/TWC.2024.3398199. [95] ZHANG Jing, REN Jia, CUI Yani, et al. Multi-USV task planning method based on improved deep reinforcement learning[J]. IEEE Internet of Things Journal, 2024, 11(10): 18549–18567. doi: 10.1109/JIOT.2024.3363044. [96] LI Yibing, ZHANG Zitang, HE Zongyu, et al. A heuristic task allocation method based on overlapping coalition formation game for heterogeneous UAVs[J]. IEEE Internet of Things Journal, 2024, 11(17): 28945–28959. doi: 10.1109/JIOT.2024.3406336. [97] ZHAI Shaobo, LI Guangwen, WU Guo, et al. Cooperative task allocation for multi heterogeneous aerial vehicles using particle swarm optimization algorithm and entropy weight method[J]. Applied Soft Computing, 2023, 148: 110918. doi: 10.1016/j.asoc.2023.110918. [98] TAN Yifang, ZHOU Chao, and QIAN Feng. Cooperative task allocation method for multi-unmanned aerial vehicles based on the modified genetic algorithm[J]. IET Intelligent Transport Systems, 2024, 18(6): 1164–1173. doi: 10.1049/itr2.12495. [99] LI Xueqing, LU Xinpeng, CHEN Wenhao, et al. Research on UAVs reconnaissance task allocation method based on communication preservation[J]. IEEE Transactions on Consumer Electronics, 2024, 70(1): 684–695. doi: 10.1109/TCE.2024.3368062. [100] LI Mincan, WANG Zidong, LI Kenli, et al. Task allocation on layered multiagent systems: When evolutionary many-objective optimization meets deep Q-learning[J]. IEEE Transactions on Evolutionary Computation, 2021, 25(5): 842–855. doi: 10.1109/TEVC.2021.3049131. [101] YI Bo, LV Jianhui, CHEN Jiahao, et al. Digital twin constructed spatial structure for flexible and efficient task allocation of drones in mobile networks[J]. IEEE Journal on Selected Areas in Communications, 2023, 41(11): 3430–3443. doi: 10.1109/JSAC.2023.3313193. [102] WANG Shengli, LIU Youjiang, QIU Yongtao, et al. Consensus-based decentralized task allocation for multi-agent systems and simultaneous multi-agent tasks[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 12593–12600. doi: 10.1109/LRA.2022.3220155. [103] YE Fang, CHEN Jie, SUN Qian, et al. Decentralized task allocation for heterogeneous multi-UAV system with task coupling constraints[J]. The Journal of Supercomputing, 2021, 77(1): 111–132. doi: 10.1007/s11227-020-03264-4. [104] 贾永楠. 低空空域无人系统交通管理方案初探[J]. 航空学报, 2025, 46(11): 531399. doi: 10.7527/S1000-6893.2025.31399.JIA Yongnan. A scheme for unmanned aerial system traffic management in low-altitude airspace[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531399. doi: 10.7527/S1000-6893.2025.31399. [105] YAZICI A and BAYKAL B. Detection and localization of drones in MIMO CW radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(1): 226–238. doi: 10.1109/TAES.2023.3321586. [106] SAYED A N, RAMAHI O M, and SHAKER G. Machine learning for UAV classification employing mechanical control information[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(1): 68–81. doi: 10.1109/TAES.2023.3272303. [107] SHOUFAN A and DAMIANI E. Contingency clarification protocols for reliable counter-drone operation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 8944–8955. doi: 10.1109/TAES.2023.3313573. [108] 钱志鸿, 田春生, 郭银景, 等. 智能网联交通系统的关键技术与发展[J]. 电子与信息学报, 2020, 42(1): 2–19. doi: 10.11999/JEIT190787.QIAN Zhihong, TIAN Chunsheng, GUO Yinjing, et al. The key technology and development of intelligent and connected transportation system[J]. Journal of Electronics & Information Technology, 2020, 42(1): 2–19. doi: 10.11999/JEIT190787. -

 下载:
下载:





图(10) / 表(2)
计量
- 文章访问数: 3878
- HTML全文浏览量: 2319
- PDF下载量: 920
- 被引次数: 0
