

Semi-passive Intelligent Reflecting Surface-assisted Integrated Sensing and Communication for Distributed and High-precision Joint Localization
-
摘要: 智能反射面(IRS)辅助的通信感知一体化(ISAC)系统通过主动调控电磁波传播环境,为提升无线网络的通信与定位性能提供了创新途径。该文提出一种半无源IRS辅助的ISAC架构,通过在基站(BS)端与IRS端协同配置感知阵列,联合接收目标反射的正交频分复用(OFDM)信号,实现无需定位导频的高精度三维协作定位。针对该架构,该文提出两种协作定位算法,即基于参数解耦的两步定位法和基于联合优化的直接定位法。两步定位法分别采用空间平滑(SS)多信号分类(MUSIC)算法和改进的快速傅里叶变换(FFT)算法,独立估计反射信号到达各感知阵列的时延与到达角余弦值等信道参数,继而利用感知阵列和目标的空间几何关系解析目标位置;直接定位法基于最大似然(ML)准则,联合所有阵列的接收信号构建关于目标位置的目标函数,采用类牛顿法在目标空间进行高效搜索完成定位。所提方案借助感知信号,不仅无需额外导频开销,还能通过联合多个OFDM符号之间的信息提高定位精度。为进一步评估算法性能极限,该文推导了信道参数及目标位置估计的克拉美罗下界(CRLB),并开展了蒙特卡罗数值仿真实验进行验证。结果表明,直接定位法在定位精度上优于两步定位法,且在高信噪比条件下能够逼近CRLB。相比传统基于到达角(AoA)/到达时间(ToA)的定位方法,该文所提算法具有更好的定位精度和鲁棒性。Abstract:
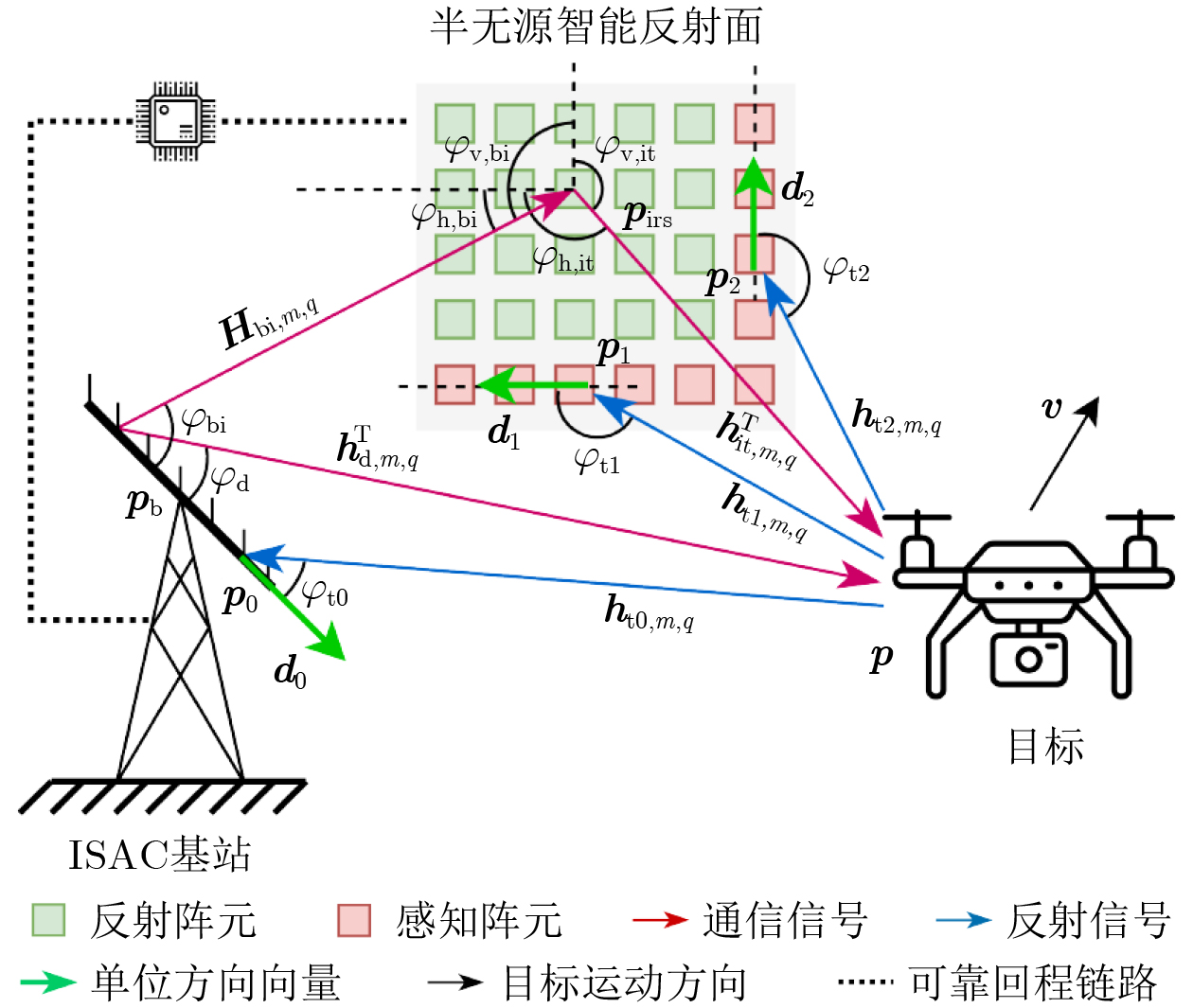
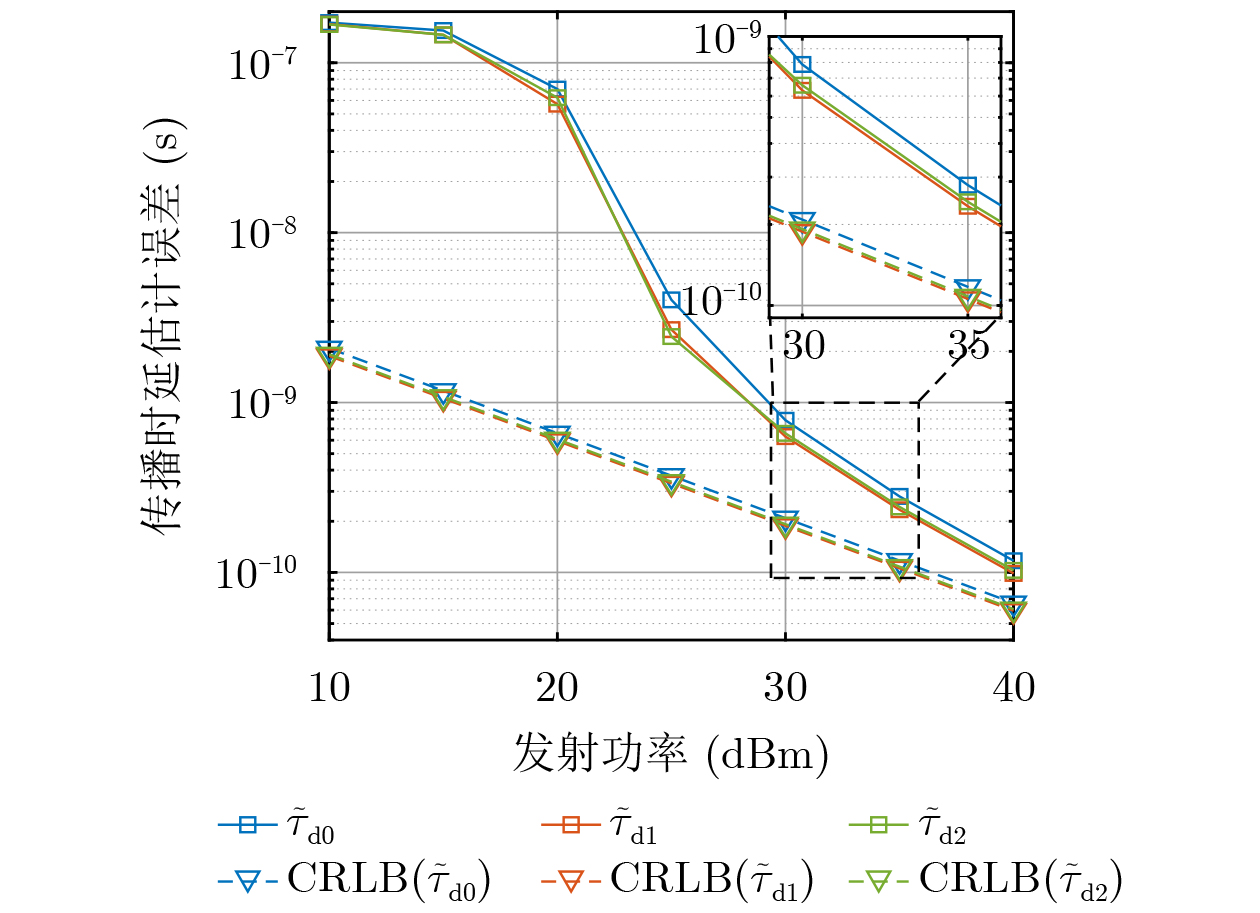
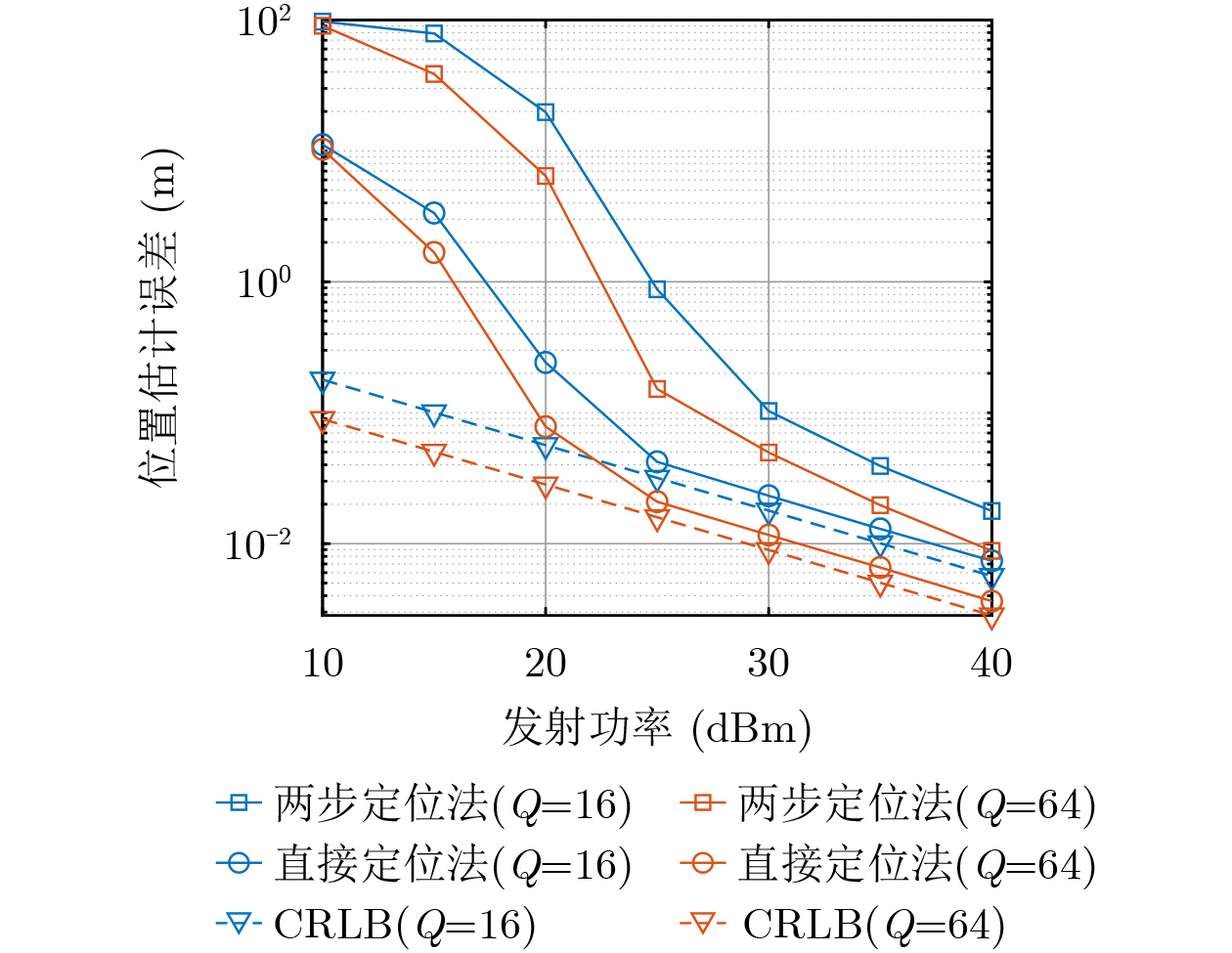
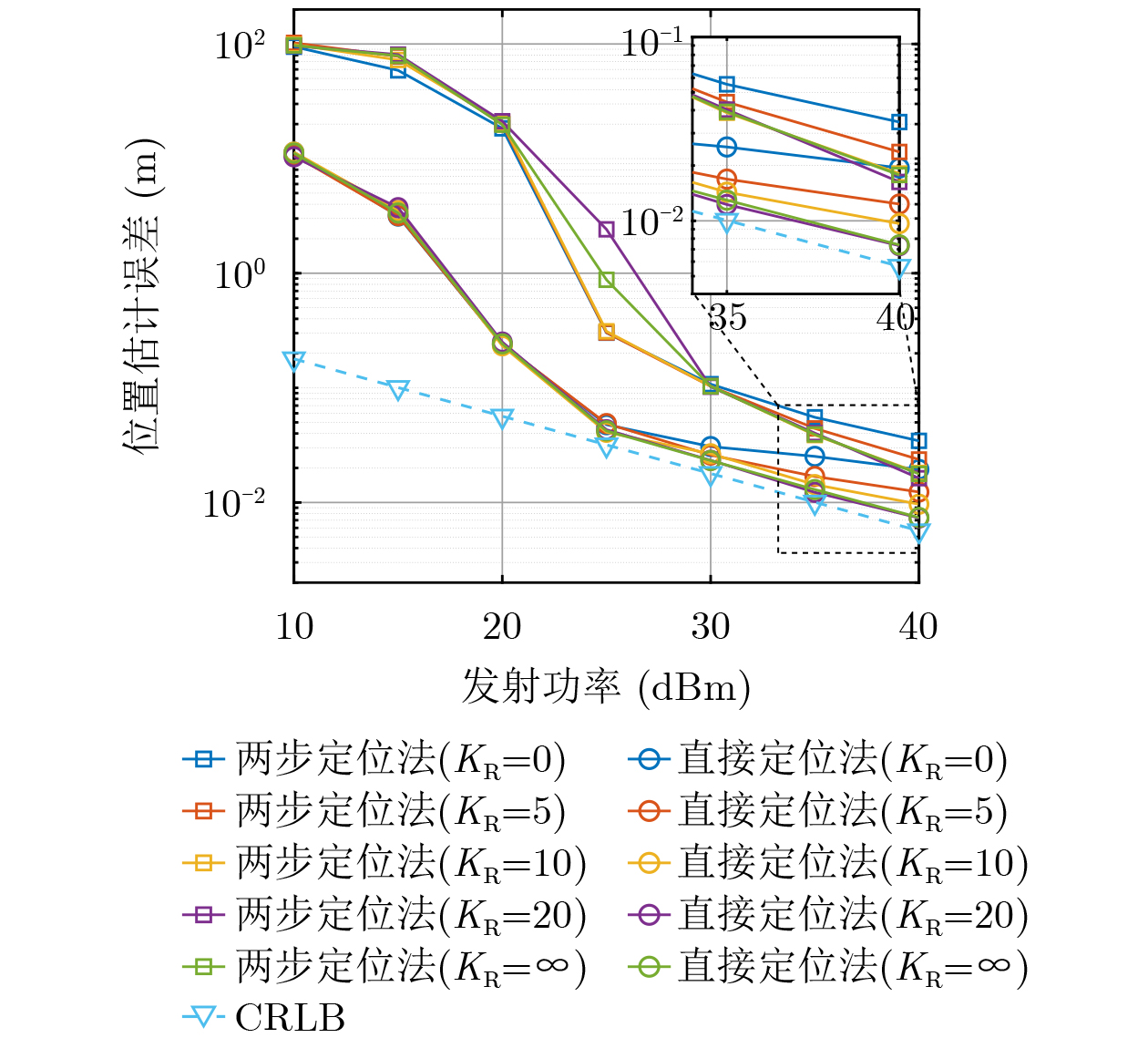
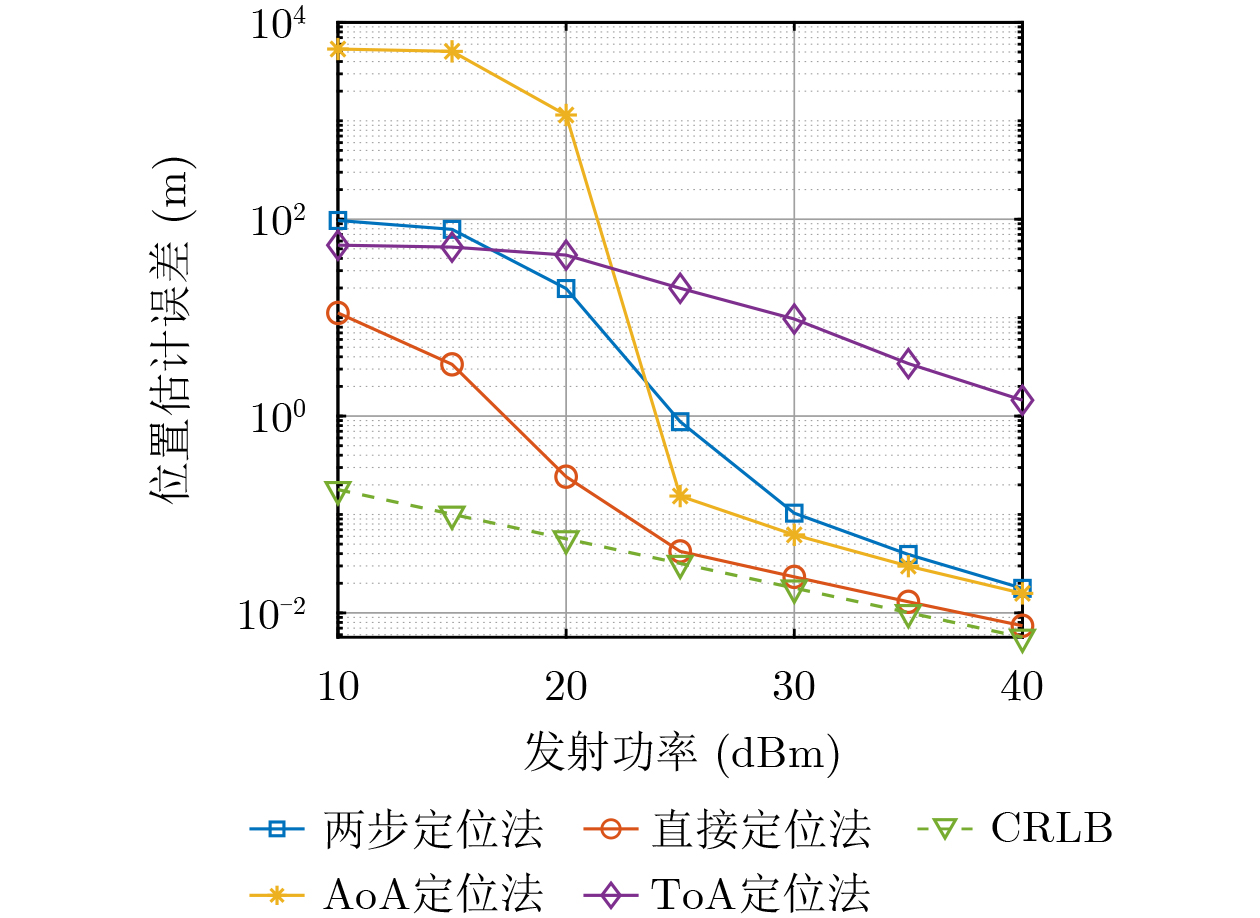
Objective Integrated Sensing And Communication (ISAC) enables communication and sensing on a shared radio platform, supporting emerging applications such as autonomous driving and smart city infrastructure while improving spectral efficiency and reducing system cost. A key feature of ISAC systems is the reuse of communication signals for sensing and localization, which enables high-precision positioning without dedicated localization pilots. In semi-passive Intelligent Reflecting Surface (IRS)-aided ISAC systems, sensing performance is improved while low hardware complexity and power consumption are maintained. Compared with fully passive IRSs, semi-passive IRSs provide limited signal-processing capability for more flexible beam control, while avoiding the high hardware cost of fully active IRSs. In addition, a semi-passive IRS can cooperate with the sensing array at the Base Station (BS) to form a distributed sensing architecture. Through joint processing of the signals received at the BS and the IRS sensing arrays, the effective sensing aperture is enlarged, which improves the accuracy and robustness of channel-parameter estimation. However, existing studies mainly address fully passive or fully active IRSs in communication scenarios, whereas the sensing capability of semi-passive IRSs and their cooperation with BS arrays for high-precision localization remain insufficiently studied. Therefore, high-precision Three-Dimensional (3D) target localization under semi-passive IRS-assisted cooperative sensing is investigated. Methods A semi-passive IRS-assisted ISAC framework is proposed for cooperative 3D target localization. Sensing arrays are deployed at both the BS and IRS to jointly receive target-reflected Orthogonal Frequency Division Multiplexing (OFDM) signals, which are then delivered through reliable backhaul links to a central processor for joint processing. Two localization algorithms are proposed. The first is a parameter-decoupled two-step localization method. In this method, the Angle of Arrival (AoA) is first estimated by Fast Fourier Transform (FFT) with a refinement procedure, and the propagation delay is then estimated by the Spatial Smoothing MUltiple SIgnal Classification (MUSIC) algorithm. The target position is subsequently obtained by solving linear equations constructed from the estimated channel parameters and the geometric relationships among the arrays. The second is a Direct Position Determination (DPD) method, in which a maximum-likelihood optimization problem is formulated and a Newton-like algorithm is used to estimate the target position directly. By jointly using prior information, including spatial correlation among arrays, communication symbols, beamforming vectors, and IRS reflection coefficients, this method reduces the error propagation of the two-step localization method and improves localization accuracy and robustness. Furthermore, the Cramér-Rao Lower Bound (CRLB) for target-position estimation is derived under circularly symmetric complex Gaussian noise to provide a theoretical benchmark. Monte Carlo simulations are conducted to verify the proposed algorithms, examine the effect of the Rician K-factor on localization performance, and compare the proposed methods with conventional AoA/ToA-based localization methods. Results and Discussions Under the proposed semi-passive IRS-assisted ISAC framework, the two-step localization method achieves statistically efficient channel-parameter estimation, and its estimation error approaches the CRLB at high Signal-to-Noise Ratio (SNR) ( Figs. 2 ~4 ). At low BS transmit power, severe path loss and noise distortion cause a clear gap between the Root Mean Square Error (RMSE) and the CRLB. As the transmit power increases, the sensing SNR increases and parameter-estimation accuracy is improved. Because the target position in the two-step localization method is obtained from linear equations constructed from the estimated channel parameters and known array geometry, the final localization accuracy follows the same trend as the intermediate parameter-estimation performance. However, because of error propagation in the two-stage process, the localization error deviates more clearly from the CRLB (Fig. 5 ). Increasing the number of OFDM symbols improves localization accuracy, but also increases latency, which indicates a trade-off between accuracy and delay in practical systems. Compared with the two-step localization method, the DPD method achieves higher localization accuracy under the same number of OFDM symbols (Fig. 5 ). By jointly processing the signals received from all sensing arrays and directly optimizing the target position under the maximum-likelihood criterion, error propagation is effectively avoided. In addition, spatial correlation among arrays, communication symbols, beamforming vectors, and IRS reflection coefficients are fully used, which further improves estimation performance. For the same localization accuracy, the DPD method requires fewer OFDM symbols or lower transmit power than the two-step localization method, which shows clear advantages in latency and energy efficiency. Simulation results also show that both proposed methods benefit from a larger Rician K-factor (Fig. 6 ), because a stronger line-of-sight component suppresses multipath interference. This effect is more evident in the high-SNR region, where small-scale fading becomes the main factor limiting performance. Finally, compared with conventional AoA/ToA-based localization methods, the proposed methods provide better localization accuracy and robustness (Fig. 7 ).Conclusions A semi-passive IRS-assisted ISAC system is proposed for 3D cooperative localization with reduced localization pilot overhead. Two localization algorithms are developed: a low-complexity two-step localization method and a high-accuracy DPD method. The theoretical performance limit is established through derivation of the CRLB. Simulation results verify that the two-step localization method enables high-precision localization, whereas the DPD method provides better performance, and its RMSE approaches the CRLB at high SNR. Both methods also show good scalability and robustness. Future work will address multi-target scenarios and resource optimization. -
表 1 系统仿真参数设置
参数 符号 值 载波频率 $f_{\mathrm{c}}$ 6 GHz 波长 $\lambda $ 0.05 m 子载波数 $M$ 64 子载波间隔 $\Delta f$ 1 MHz OFDM符号数 $Q$ 16 FFT点数 $F_3$ 256 噪声功率谱密度 $ P_{\mathrm{n}} $ –184 dBm/Hz 噪声功率 $\sigma _{k}^{2}=P_{\mathrm{n}}\Delta f, k\in \left\{ 0,1,2 \right\} $ –124 dBm 发射阵列阵元数 $N_{\mathrm{t}}$ 16 感知阵列数 $K$ 3 感知阵列阵元数 $N_k, k\in \mathbb{K} $ 33 反射阵元数 $N=N_{\mathrm{h}}N_{\mathrm{v}}$ 1 024 BS位置 $\boldsymbol{p}_{\mathrm{b}}$ $\left[ 10,10,25 \right] ^{{\mathrm{T}}}\,\,\mathrm{m}$ IRS位置 $\boldsymbol{p}_{\mathrm{irs}}$ $\left[ 0,0,30 \right] ^{{\mathrm{T}}}\,\,\mathrm{m}$ 目标位置 $\boldsymbol{p}$ $\left[ -10,20,40 \right] ^{{\mathrm{T}}}\,\,\mathrm{m}$ 目标速度 $\boldsymbol{v}$ $\left[ 4,5,6 \right] ^{{\mathrm{T}}}\,\,\mathrm{m}/ \mathrm{s}$  下载: 导出CSV
下载: 导出CSV
-
[1] LIU Fan, CUI Yuanhao, MASOUROS C, et al. Integrated sensing and communications: Toward dual-functional wireless networks for 6G and beyond[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(6): 1728–1767. doi: 10.1109/JSAC.2022.3156632. [2] LYU Shuyang, HU Xiaoling, LIU Chenxi, et al. IRS-aided location sensing and beamforming in ISAC systems: Distributed or not?[J]. IEEE Transactions on Vehicular Technology, 2024, 73(9): 13219–13233. doi: 10.1109/TVT.2024.3391941. [3] 林粤伟, 张奇勋, 尉志青, 等. 通信感知一体化硬件设计——现状与展望[J]. 电子与信息学报, 2025, 47(1): 1–21. doi: 10.11999/JEIT240012.LIN Yuewei, ZHANG Qixun, WEI Zhiqing, et al. Status and prospect of hardware design on integrated sensing and communication[J]. Journal of Electronics & Information Technology, 2025, 47(1): 1–21. doi: 10.11999/JEIT240012. [4] LIU Fan, MASOUROS C, PETROPULU A P, et al. Joint radar and communication design: Applications, state-of-the-art, and the road ahead[J]. IEEE Transactions on Communications, 2020, 68(6): 3834–3862. doi: 10.1109/TCOMM.2020.2973976. [5] WU Qingqing, ZHANG Shuowen, ZHENG Beixiong, et al. Intelligent reflecting surface-aided wireless communications: A tutorial[J]. IEEE Transactions on Communications, 2021, 69(5): 3313–3351. doi: 10.1109/TCOMM.2021.3051897. [6] SHAO Xiaodan, YOU Changsheng, MA Wenyan, et al. Target sensing with intelligent reflecting surface: Architecture and performance[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(7): 2070–2084. doi: 10.1109/JSAC.2022.3155546. [7] YU Zhouyuan, HU Xiaoling, LIU Chenxi, et al. Location sensing and beamforming design for IRS-enabled multi-user ISAC systems[J]. IEEE Transactions on Signal Processing, 2022, 70: 5178–5193. doi: 10.1109/TSP.2022.3217353. [8] LIU Chenxi, HU Xiaoling, PENG Mugen, et al. Sensing for beamforming: An IRS-enabled integrated sensing and communication framework[C]. ICC 2022 - IEEE International Conference on Communications, Seoul, Korea, Republic of, 2022: 5567–5572. doi: 10.1109/ICC45855.2022.9838505. [9] LI Renwang, SHAO Xiaodan, SUN Shu, et al. Beam scanning for integrated sensing and communication in IRS-aided mmWave systems[C]. 2023 IEEE 24th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Shanghai, China, 2023: 196–200. doi: 10.1109/SPAWC53906.2023.10304548. [10] HUA Meng, WU Qingqing, CHEN Wen, et al. Intelligent reflecting surface-assisted localization: Performance analysis and algorithm design[J]. IEEE Wireless Communications Letters, 2024, 13(1): 84–88. doi: 10.1109/LWC.2023.3320728. [11] XIA Fanghao, FEI Zesong, HUANG Jingxuan, et al. Sensing-enabled predictive beamforming design for RIS-assisted V2I systems: A deep learning approach[J]. IEEE Transactions on Wireless Communications, 2024, 23(6): 5571–5586. doi: 10.1109/TWC.2023.3327362. [12] HU Jiangfeng, YIN Haifan, and BJÖRNSON E. MmWave MIMO communication with semi-passive RIS: A low-complexity channel estimation scheme[C]. 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 2021: 1–6. doi: 10.1109/GLOBECOM46510.2021.9685434. [13] KANG Zhenyu, YOU Changsheng, and ZHANG Rui. Active-IRS-aided wireless communication: Fundamentals, designs and open issues[J]. IEEE Wireless Communications, 2024, 31(3): 368–374. doi: 10.1109/MWC.003.2300013. [14] YU Fan, GUO Mingqi, JING Guangzheng, et al. Incorporating clustering for joint 3-D localization and environmental sensing method using the spherical-wavefront parametric model[J]. IEEE Open Journal of the Communications Society, 2025, 6: 10042–10060. doi: 10.1109/OJCOMS.2025.3639445. [15] PENG Xingyu, HU Xiaoling, GAO Jiabao, et al. Integrated localization and communication for IRS-assisted multi-user mmWave MIMO systems[J]. IEEE Transactions on Communications, 2024, 72(8): 4725–4740. doi: 10.1109/TCOMM.2024.3379399. [16] KIANOUSH S, NORDIO A, DOSSI L, et al. Joint RIS-assisted localization and communication: A tradeoff among accuracy, spectrum efficiency, and time resource[J]. IEEE Sensors Journal, 2025, 25(3): 5630–5643. doi: 10.1109/JSEN.2024.3501404. [17] XU Xiaodong, ZHU Fangzhou, HAN Shujun, et al. Swin-loc: Transformer-based CSI fingerprinting indoor localization with MIMO ISAC system[J]. IEEE Transactions on Vehicular Technology, 2024, 73(8): 11664–11679. doi: 10.1109/TVT.2024.3381433. [18] SOLTANI M, POURAHMADI V, and SHEIKHZADEH H. Pilot pattern design for deep learning-based channel estimation in OFDM systems[J]. IEEE Wireless Communications Letters, 2020, 9(12): 2173–2176. doi: 10.1109/LWC.2020.3016603. [19] LYU Zhonghao, ZHU Guangxu, and XU Jie. Joint maneuver and beamforming design for UAV-enabled integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(4): 2424–2440. doi: 10.1109/TWC.2022.3211533. [20] ALEXANDROPOULOS G C, SHLEZINGER N, ALAMZADEH I, et al. Hybrid reconfigurable intelligent metasurfaces: Enabling simultaneous tunable reflections and sensing for 6G wireless communications[J]. IEEE Vehicular Technology Magazine, 2024, 19(1): 75–84. doi: 10.1109/MVT.2023.3332580. [21] MOLISCH A F, TOELTSCH M, and VERMANI S. Iterative methods for cancellation of intercarrier interference in OFDM systems[J]. IEEE Transactions on Vehicular Technology, 2007, 56(4): 2158–2167. doi: 10.1109/TVT.2007.897628. [22] MELVIN W L. Space-time adaptive radar performance in heterogeneous clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(2): 621–633. doi: 10.1109/7.845251. [23] KEYKHOSRAVI K, KESKIN M F, SECO-GRANADOS G, et al. SISO RIS-enabled joint 3D downlink localization and synchronization[C]. ICC 2021 - IEEE International Conference on Communications, Montreal, Canada, 2021: 1–6. doi: 10.1109/ICC42927.2021.9500281. -

 下载:
下载:




图(7) / 表(1)
计量
- 文章访问数: 338
- HTML全文浏览量: 169
- PDF下载量: 38
- 被引次数: 0
