

Research on UAV Swarm Radiation Source Localization Method Based on Dynamic Formation Optimization
-
摘要: 在障碍物密集、结构复杂的城市场景中,无人机编队进行辐射源定位常受到信号衰减、多径效应和建筑物遮挡等因素的影响,导致现有方法定位精度不高。针对这一问题,该文提出了一种基于动态队形调整的无人机编队辐射源定位方法。该方法通过优化无人机编队的几何构型,有效降低路径损耗与干扰,从而提升定位性能。具体而言,系统利用接收信号强度实时评估信号质量,并在编队运动过程中根据环境变化自适应调整队形,以优化信号传播路径。同时,结合几何定位精度因子、均方根误差等指标,对编队结构进行动态优化,从而提高距离估计与定位解算的可靠性。实验结果表明,相比传统方法,该方法在复杂城市环境中能够更快收敛并显著提升定位精度,定位误差降低了80%以上。同时,所提方法能够有效适应动态环境变化,展现出较强的鲁棒性与实用价值。Abstract:
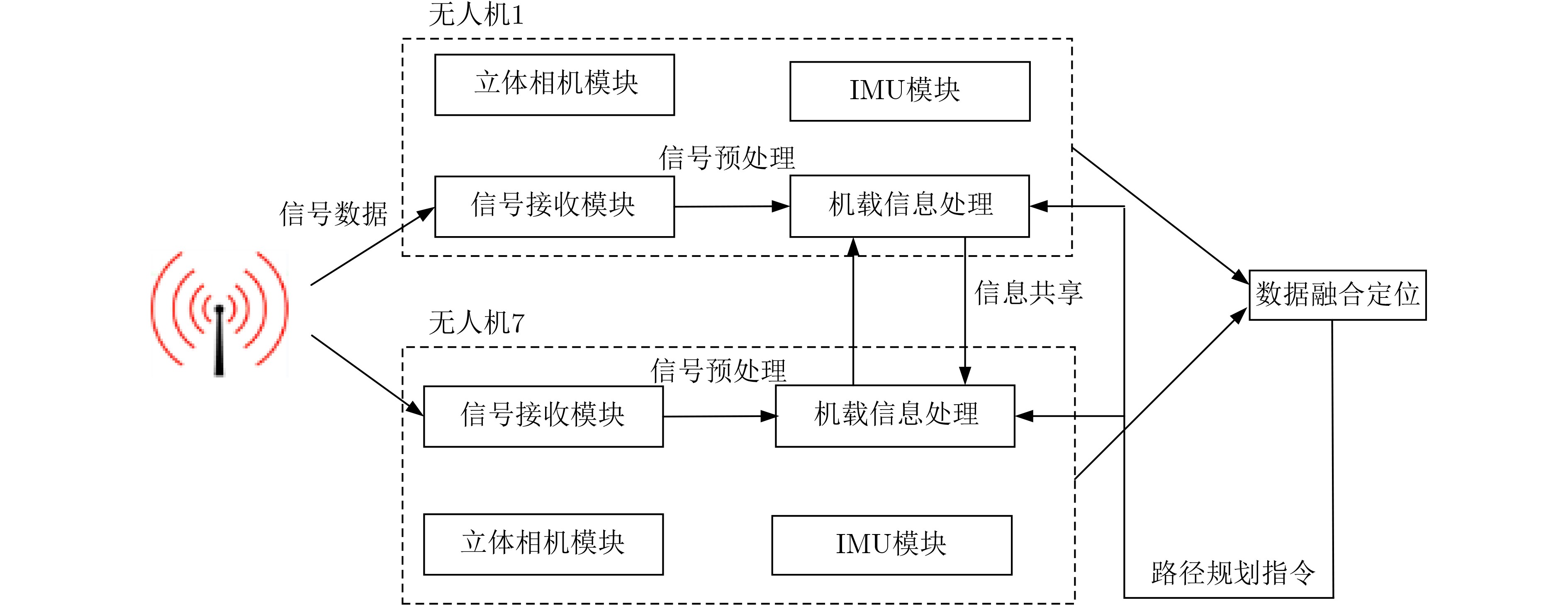
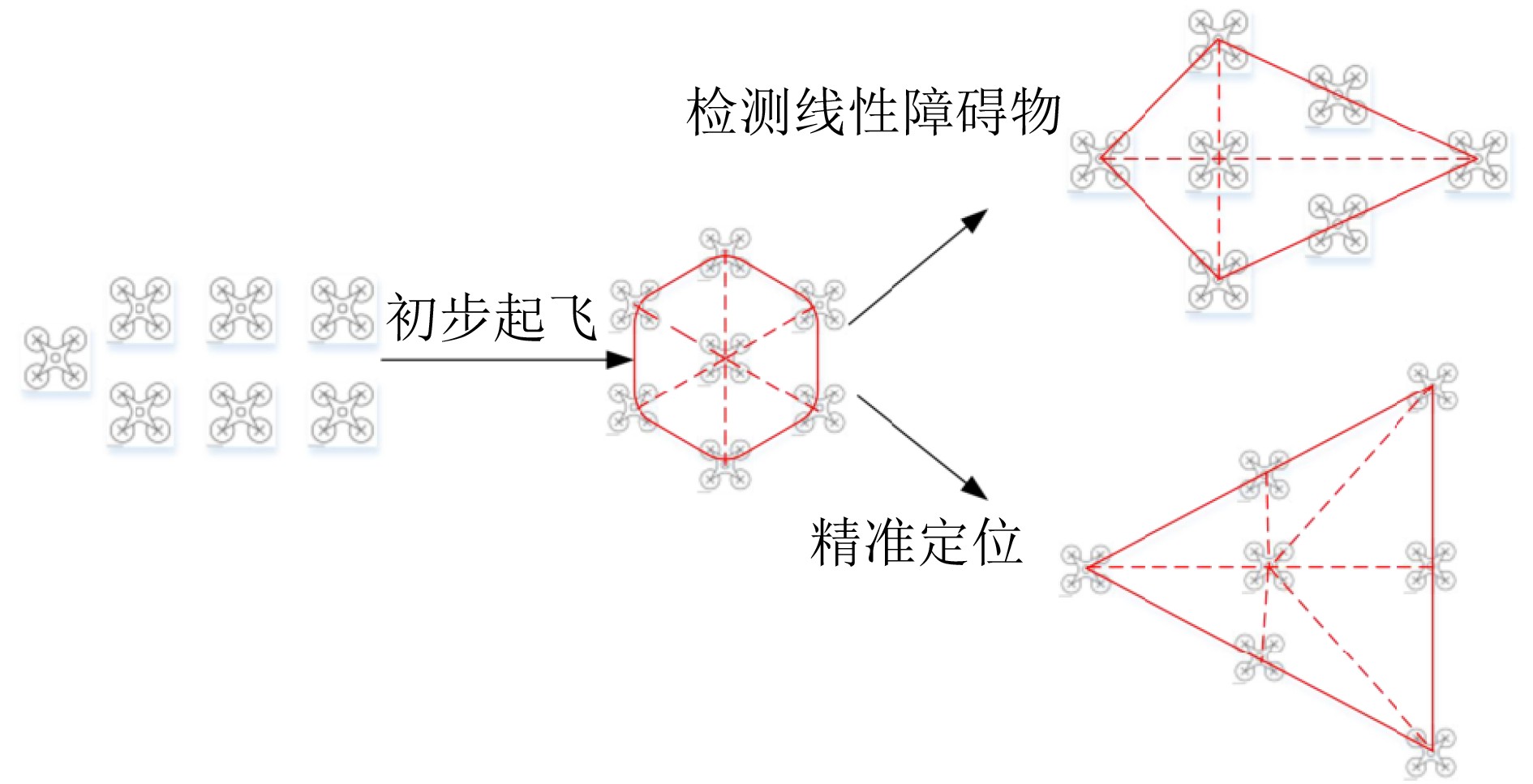
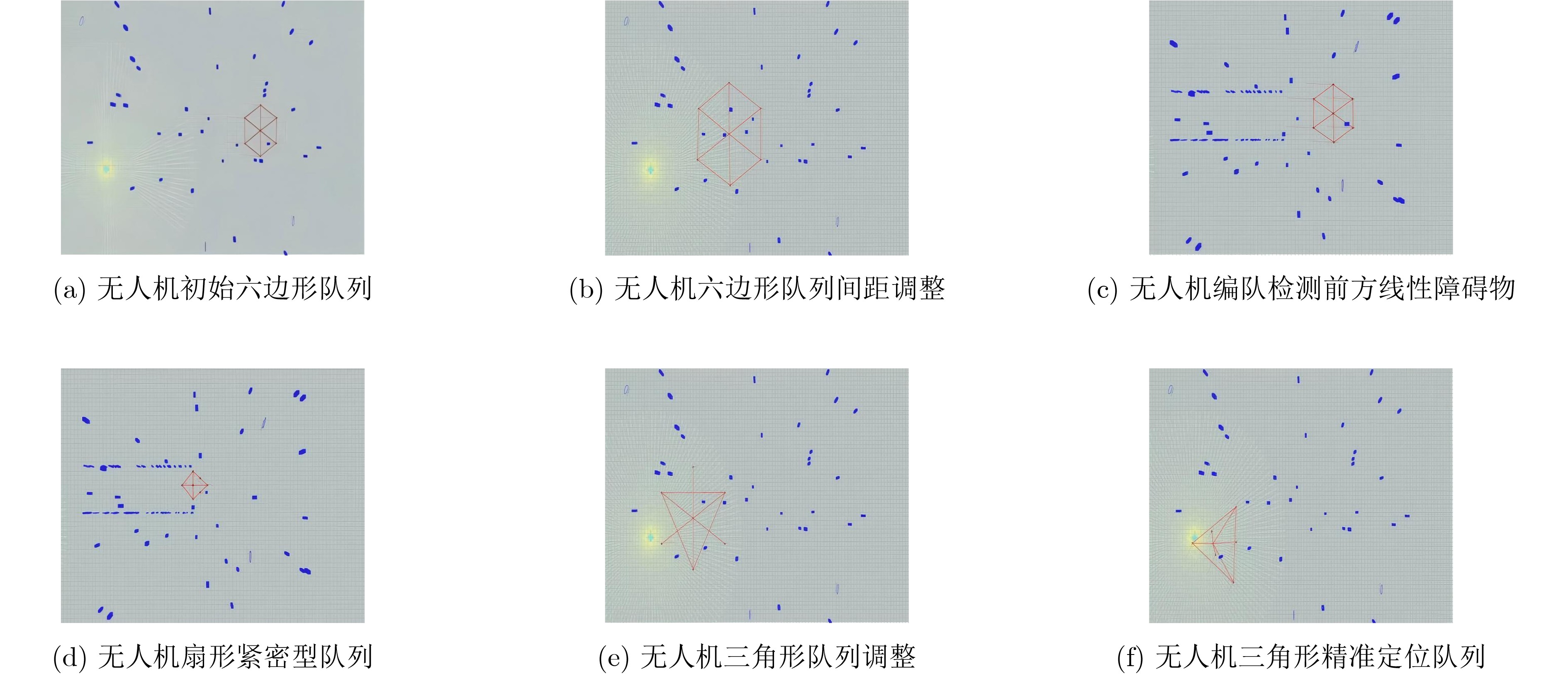
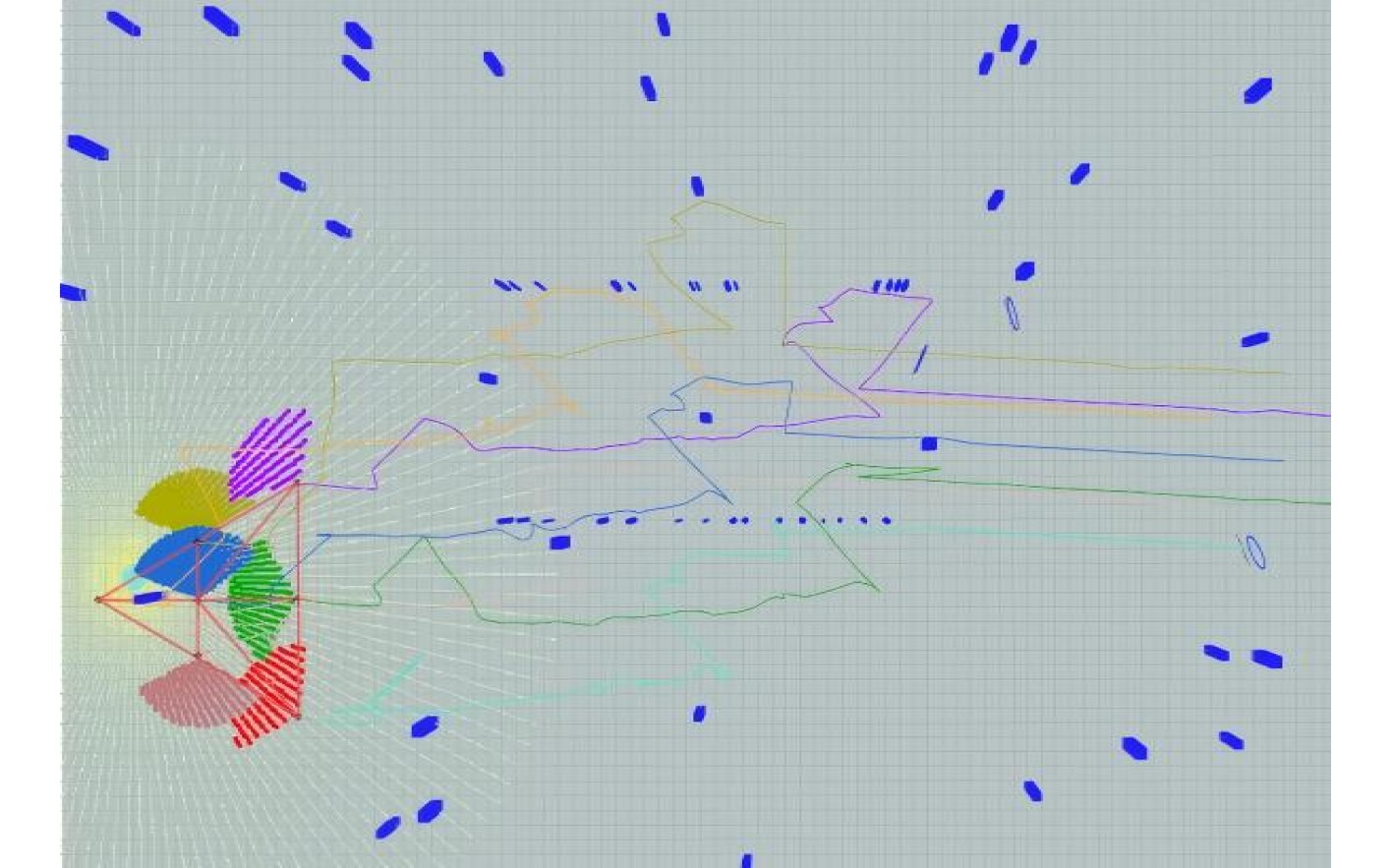
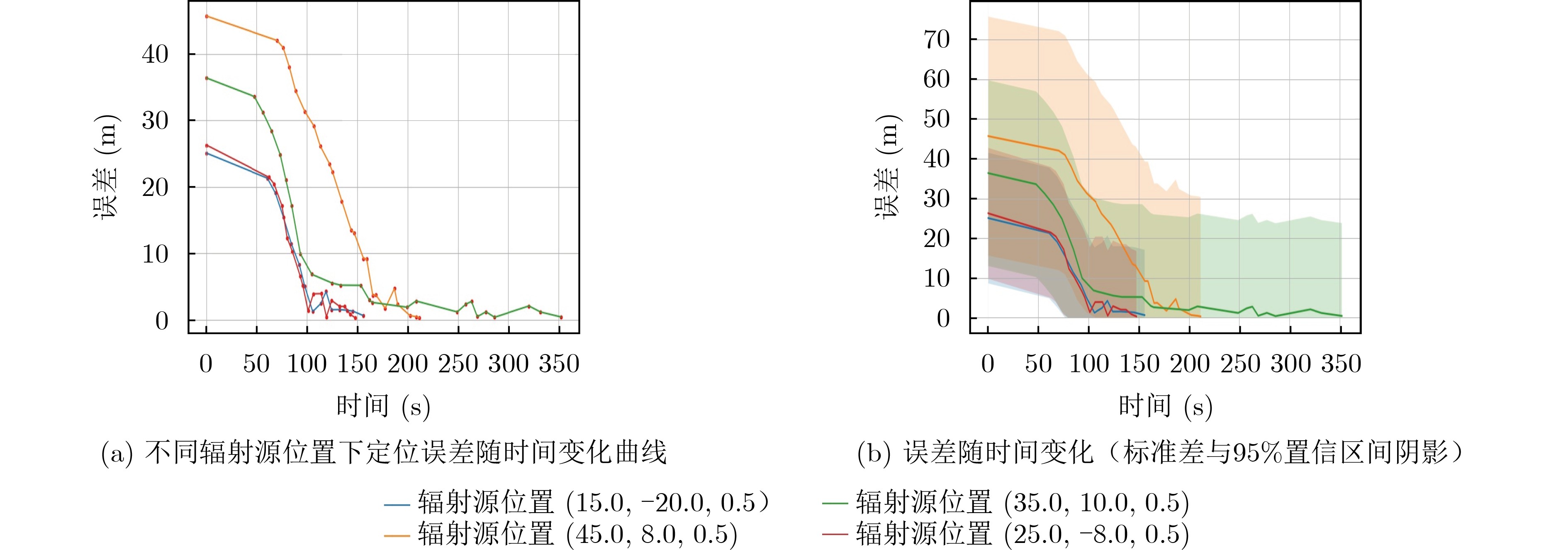
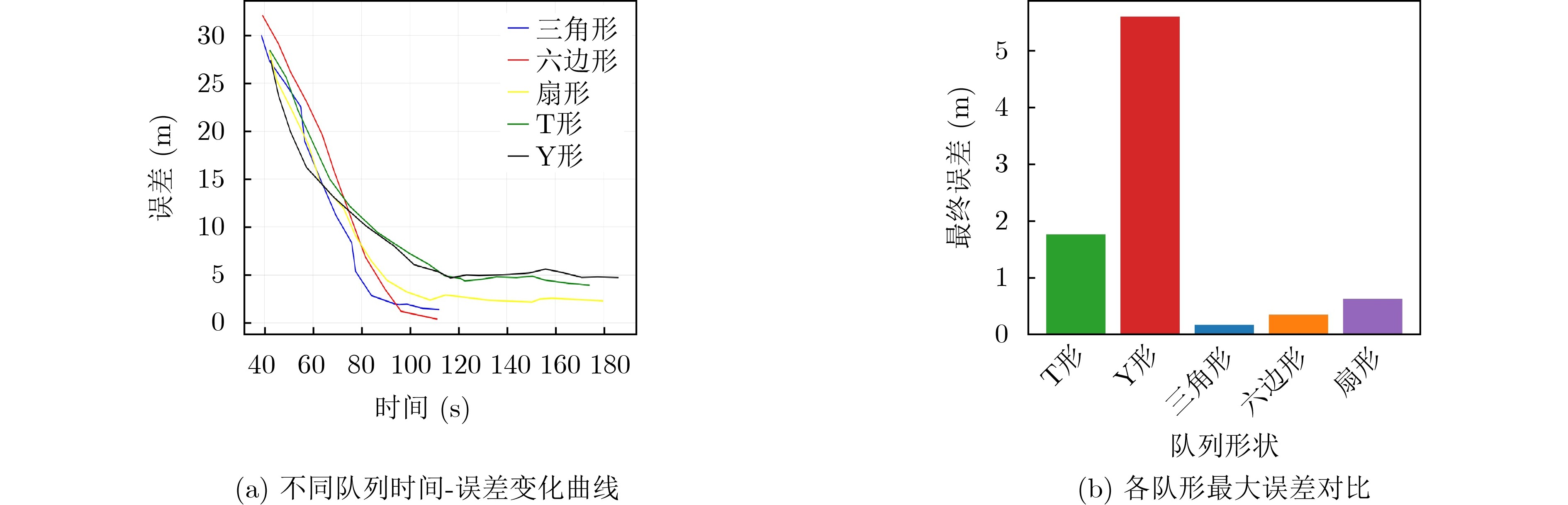
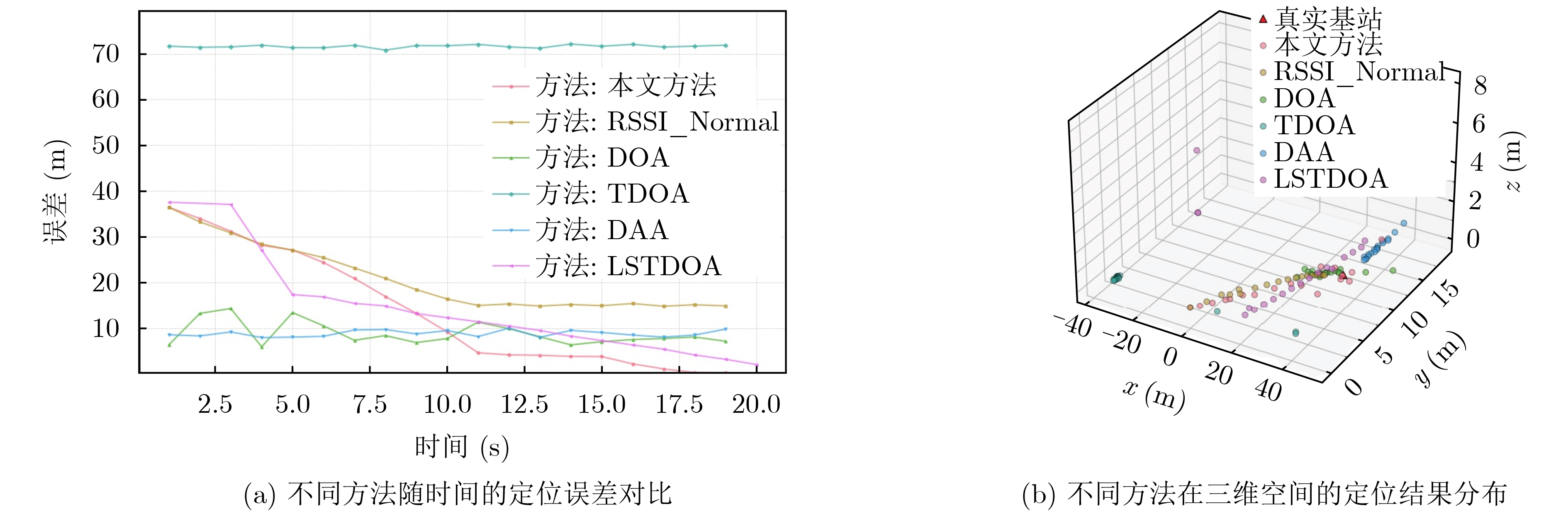
In dense and structurally complex urban environments, Unmanned Aerial Vehicle (UAV) swarm radiation source localization is affected by signal attenuation, multipath propagation, and building obstructions. To address these limitations, a dynamic formation-optimization method for UAV swarms is proposed. By improving the geometric configuration of the swarm, the method reduces path loss and interference, which strengthens localization accuracy. Received signal strength is used to evaluate signal quality in real time and supports adaptive formation adjustments that improve propagation conditions. Geometric dilution of precision and root mean square error metrics are integrated to refine swarm geometry and improve distance-estimation reliability. Simulation results show that the proposed method converges faster and improves localization accuracy in complex urban environments, reducing errors by more than 80 percent. The method adapts to environmental variation and demonstrates strong robustness and practical value. Objective UAV swarm localization and formation control in urban environments are affected by obstacles, signal attenuation, and rapid variation in the surroundings that reduce the reliability of conventional methods. This study proposes a radiation source localization approach that integrates the Received Signal Strength Indicator (RSSI) with dynamic formation adjustment to improve localization accuracy and strengthen system robustness in complex urban scenarios. RSSI is used once in full form, then referenced consistently. Methods The method uses RSSI measurements to estimate the distance to the radiation source and adjusts UAV swarm formation in real time to reduce localization errors. These adjustments are based on feedback that reflects relative positions, signal strength, and environmental variation. Localization accuracy is strengthened through a multi-sensor fusion strategy that integrates GPS, IMU, and depth-camera data. A data-quality assessment mechanism evaluates signal reliability and triggers formation adaptation when the signal drops below a predefined threshold. This optimization process reduces positioning errors and improves system robustness. Results and Discussions Simulation experiments in an ROS-based environment were conducted to evaluate the UAV swarm localization method under urban obstacles and multipath conditions. The swarm began in a hexagonal formation and adjusted its geometry according to environmental variation and localization confidence ( Fig. 3 ,Fig. 4 ). As shown in Fig. 5, localization errors fluctuated during initialization but converged to below 1 m after 150 s. Formation comparisons (Fig. 6 ) showed that symmetric structures such as hexagonal and triangular formations maintained errors below 0.5 m, whereas asymmetric formations (T and Y shape) produced deviations up to 4.9 m. Further comparisons (Fig. 7 ) showed that traditional RSSI saturated near 15 m, direction of arrival fluctuated between 5 and 14 m, and time difference of arrival failed due to synchronization problems. The proposed method achieved sub-meter accuracy within 60 s and remained robust throughout the mission. These findings indicate that combining RSSI-based distance estimation with dynamic formation adjustment improves localization accuracy, convergence speed, and adaptability under complex environmental conditions.Conclusions This study addresses UAV swarm localization in complex urban environments by integrating RSSI-based distance estimation, dynamic formation adjustment, and multi-sensor fusion. ROS-based simulations show that: (1) localization errors converge rapidly to sub-meter levels, reaching below 1 m within 150 s under non-line-of-sight conditions; (2) symmetric formations such as hexagonal and triangular configurations outperform asymmetric ones and reduce errors by up to 67 percent compared with fixed Y-shaped formations; and (3) relative to traditional RSSI, direction of arrival, and time difference of arrival approaches, the proposed method shows faster convergence, higher stability, and stronger robustness. -
[1] AMARCHA F A, CHEHRI A, JAKIMI A, et al. Drones optimization for public transportation safety: Enhancing surveillance and efficiency in smart cities[C]. The 2024 IEEE World Forum on Public Safety Technology (WFPST), Herndon, USA, 2024: 153–158. doi: 10.1109/WFPST58552.2024.00023. [2] LIU Tao and ZHANG Bohan. A UAV-based remote sensing image automatic monitoring system empowered by artificial intelligence[C]. The 2024 International Conference on Intelligent Algorithms for Computational Intelligence Systems (IACIS), Hassan, India, 2024: 1–5. doi: 10.1109/IACIS61494.2024.10721807. [3] 闫莉, 岳涛, 方旭明. 铁路应急场景下无人机通信感知一体化无线网络资源智能分配算法[J]. 电子与信息学报, 2024, 46(9): 3510–3519. doi: 10.11999/JEIT240254.YAN Li, YUE Tao, FANG Xuming. Intelligent Wireless Resource Allocation Algorithm for Unmanned Aerial Vehicle Integrated Communication and Sensing Networks in Railway Emergency Scenarios[J]. Journal of Electronics & Information Technology, 2024, 46(9): 3510–3519. doi: 10.11999/JEIT240254. [4] 万显荣, 武冰倩, 易建新, 等. 面向外辐射源雷达发射站定位的合作无人机航迹规划方法研究[J]. 电子与信息学报, 2024, 46(5): 2057–2064. doi: 10.11999/JEIT231293.WAN Xianrong, WU Bingqian, YI Jianxin, HU Shibo. UAV Path Planning Method for Passive Radar Transmitter Localization[J]. Journal of Electronics & Information Technology, 2024, 46(5): 2057–2064. doi: 10.11999/JEIT231293. [5] 董超, 崔灿, 贾子晔, 等. 面向低空智联网的多维信息统一表征技术综述[J]. 电子与信息学报, 2025, 47(5): 1215–1229. doi: 10.11999/JEIT240835.DONG Chao, CUI Can, JIA Ziye, et al. Survey of Unified Representation Technology of Multi-dimensional Information for Low Altitude Intelligent Network[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1215–1229. doi: 10.11999/JEIT240835. [6] YE Xinzhe, XUE Wei, CHEN Xiaolong, et al. Cauchy kernel-based AEKF for UAV target tracking via digital ubiquitous radar under the sea–air background[J]. IEEE Geoscience and Remote Sensing Letters, 2024, 21: 3506605. doi: 10.1109/LGRS.2024.3402687. [7] SUH U S, HAN S K, and RA W S. Optimal formation of UAV swarm for TDOA-based passive target tracking[J]. Journal of Electrical Engineering & Technology, 2022, 17(1): 551–564. doi: 10.1007/s42835-021-00872-9. [8] KANG Zhen, DENG Yihang, YAN Hao, et al. A new method of UAV swarm formation flight based on AOA azimuth-only passive positioning[J]. Drones, 2024, 8(6): 243. doi: 10.3390/drones8060243. [9] WANG Yubing, WANG Weijia, ZHANG Xudong, et al. The joint phantom track deception and TDOA/FDOA localization using UAV swarm without prior knowledge of radars' precise locations[J]. Electronics, 2022, 11(10): 1577. doi: 10.3390/electronics11101577. [10] ZHANG Yuan, QI Juntong, WU Chong, et al. Indoor UAV formation system based on UWB positioning[C]. The 2023 42nd Chinese Control Conference (CCC), Tianjin, China, 2023: 8545–8550. doi: 10.23919/CCC58697.2023.10240727. [11] GÜZEY N. RF source localization using multiple UAVs through a novel geometrical RSSI approach[J]. Drones, 2022, 6(12): 417. doi: 10.3390/drones6120417. [12] CHEN Siyuan, ZENG Xiangding, LAEFER D F, et al. Flight path setting and data quality assessments for unmanned-aerial-vehicle-based photogrammetric bridge deck documentation[J]. Sensors, 2023, 23(16): 7159. doi: 10.3390/s23167159. [13] 滕怀亮, 李本威, 高永, 等. 基于飞行数据的无人机平飞动作质量评价模型[J]. 北京航空航天大学学报, 2019, 45(10): 2108–2114. doi: 10.13700/J.BH.1001-5965.2019.0029.TENG Huailiang, LI Benwei, GAO Yong, et al. Quality evaluation model of unmanned aerial vehicle's horizontal flight maneuver based on flight data[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(10): 2108–2114. doi: 10.13700/J.BH.1001-5965.2019.0029. [14] 屈耀红, 张峰, 谷任能, 等. 基于距离测量的多无人机协同目标定位方法[J]. 西北工业大学学报, 2019, 37(2): 266–272. doi: 10.3969/j.issn.1000-2758.2019.02.008.QU Yaohong, ZHANG Feng, GU Renneng, et al. Target cooperative location method of multi-UAV based on pseudo range measurement[J]. Journal of Northwestern Polytechnical University, 2019, 37(2): 266–272. doi: 10.3969/j.issn.1000-2758.2019.02.008. [15] QUAN Lun, YIN Longji, XU Chao, et al. Distributed swarm trajectory optimization for formation flight in dense environments[C]. The 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, USA, 2022: 4979–4985. doi: 10.1109/ICRA46639.2022.9812050. [16] ZHU Jiandong, DING Ting, and QIAO Lijuan. A closed-form solution for 3D source localization using angles and Doppler shifted frequencies[J]. IEEE Access, 2023, 11: 89581–89590. doi: 10.1109/ACCESS.2023.3305961. [17] MA Wen and ZHU Hongyan. Source localization using TDOA with sensor position errors based on constrained total least squares and ADMM[C]. The 2024 27th International Conference on Information Fusion (FUSION), Venice, Italy, 2024: 1–8. doi: 10.23919/FUSION59988.2024.10706425. -

 下载:
下载:


图(7)
计量
- 文章访问数: 497
- HTML全文浏览量: 384
- PDF下载量: 53
- 被引次数: 0
