

Indoor Visible Light Positioning Based on CNN–MLP Multi-Feature Fusion under Random Receiver Tilt Conditions
-
摘要: 针对室内可见光定位(VLP)系统中接收器姿态扰动会破坏接收光功率(RSS)与空间位置的对应关系,导致定位精度下降的问题,提出一种光电传感器(PD)阵列结合机器学习(ML)的特征融合定位方法。首先利用阵列中不同PD接收光功率的差异构建约束方程,采用高斯–牛顿迭代算法估计入射角余弦值。其次设计融合卷积神经网络(CNN)与多层感知机(MLP)的优化模型,实现对RSS与入射角余弦特征的联合建模,缓解了单一RSS在接收器随机扰动条件下位置映射关系不稳定的问题,增强系统对接收器姿态扰动的鲁棒性。最后引入拉丁超立方抽样(LHS)策略构建训练数据集,提升训练样本的空间代表性。仿真结果表明,在4 m×4 m×2.5 m的室内环境,平均定位误差约4.6 cm;即使接收器倾斜至55°时,平均误差仍在11.7 cm以内。与现有方法相比,定位精度提升约2.5 cm,均方根误差(RMSE)降低31.58%,实现了接收器在姿态发生扰动时的高精度室内三维定位。Abstract:
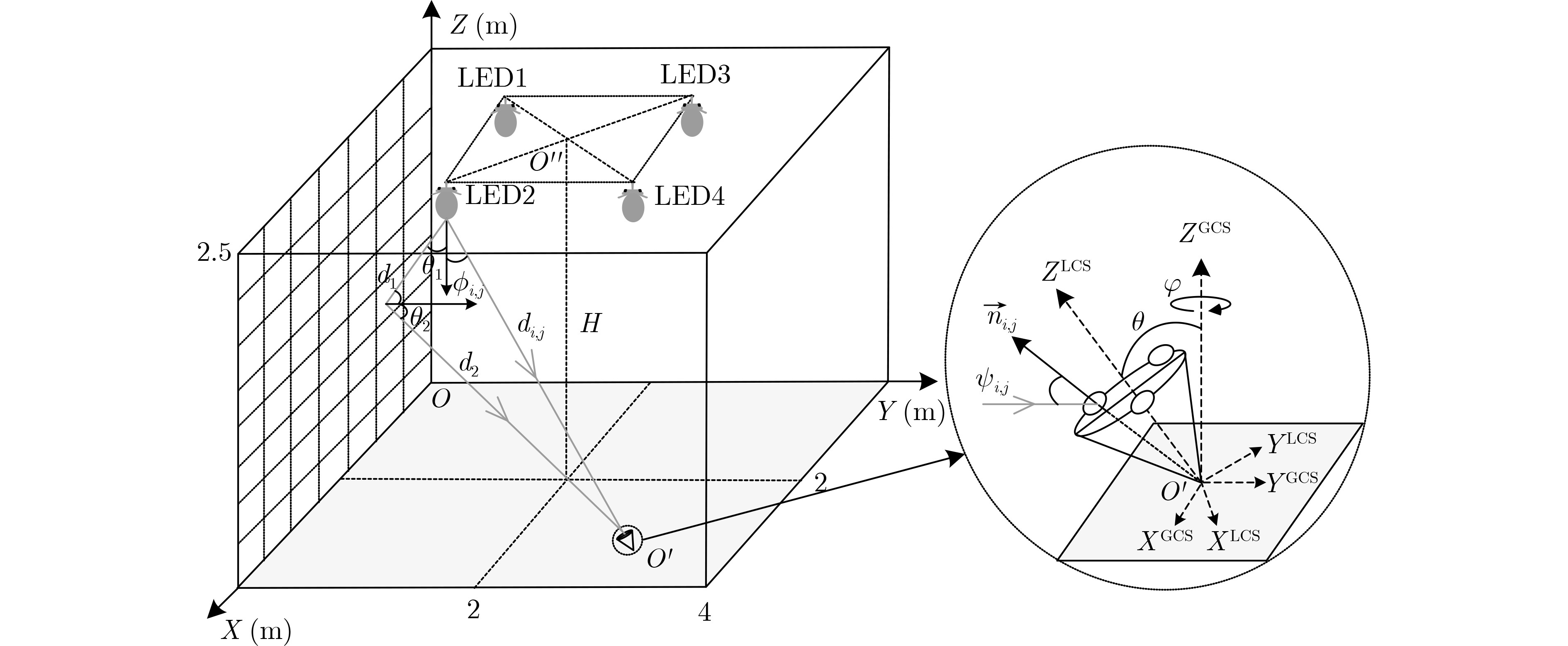
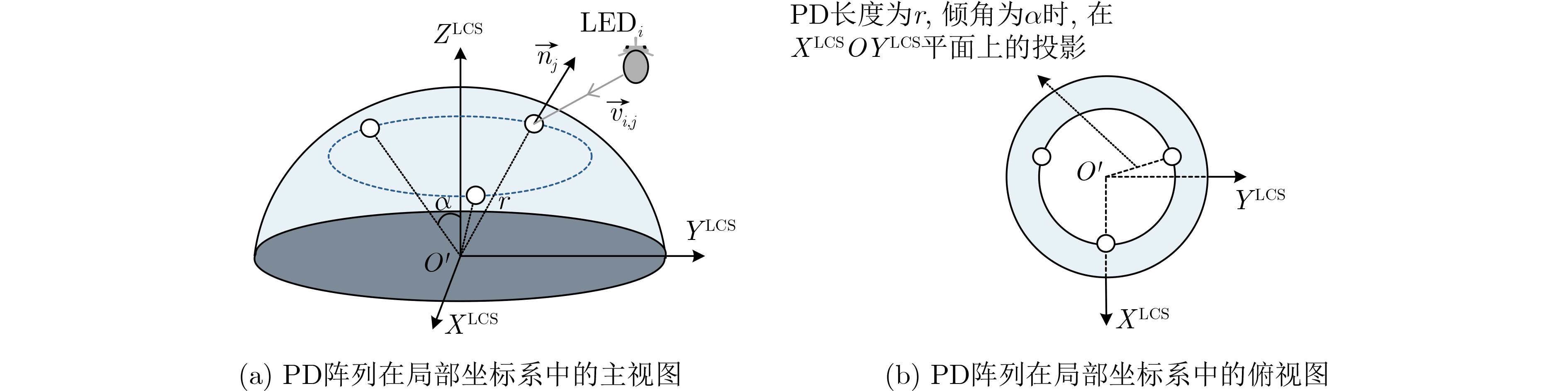
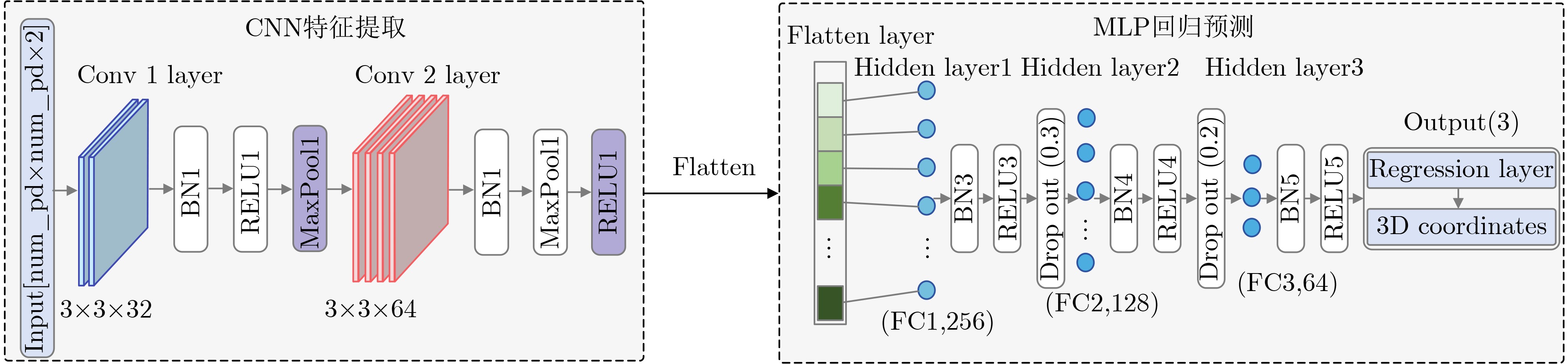
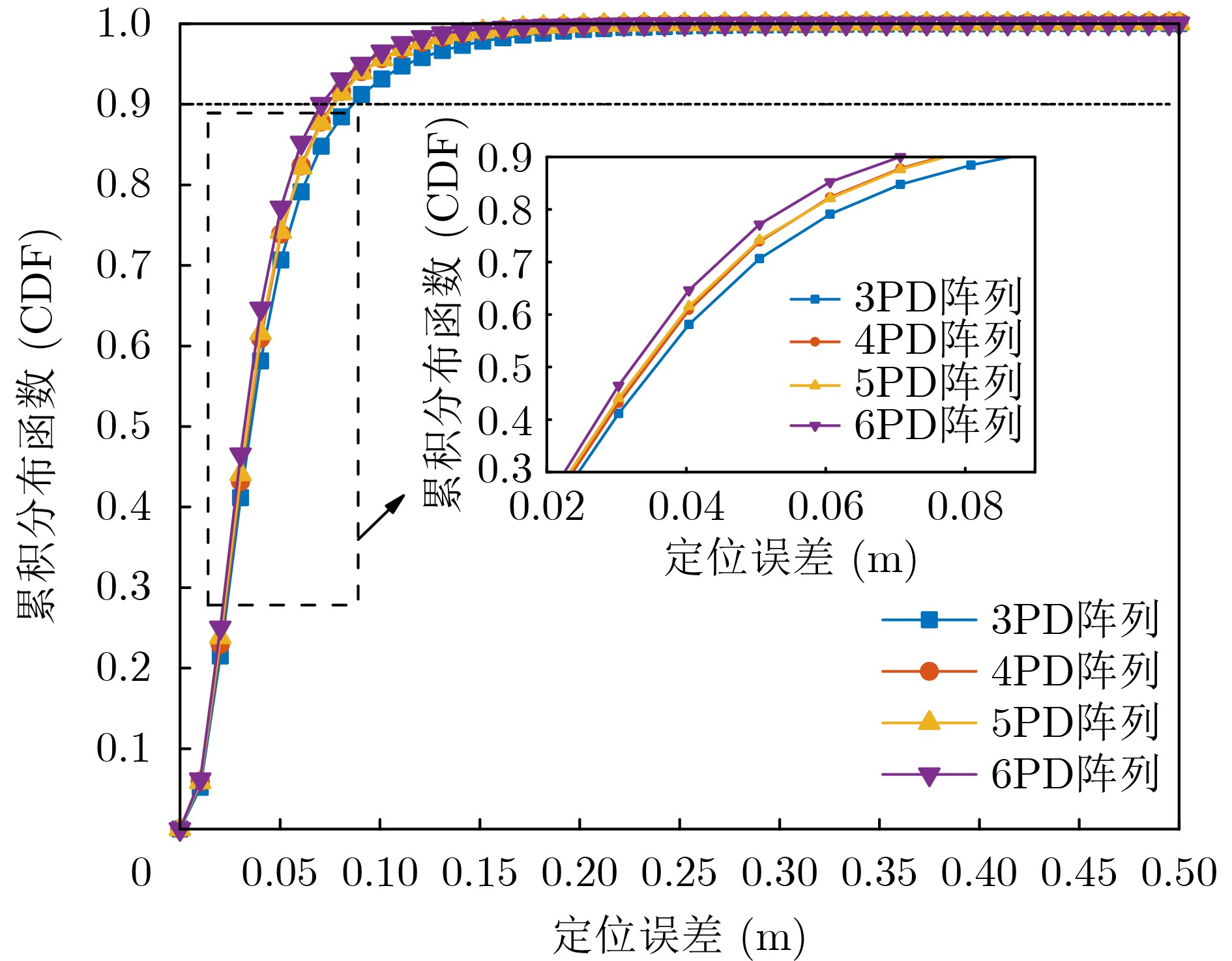
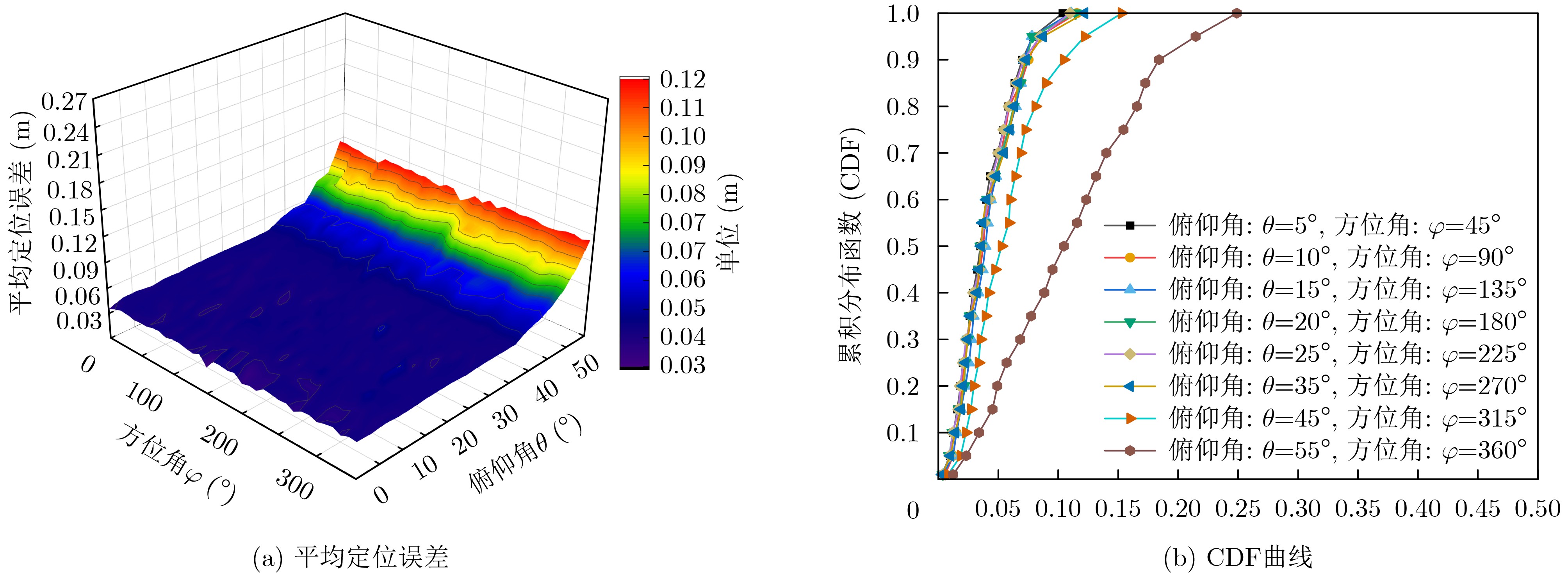
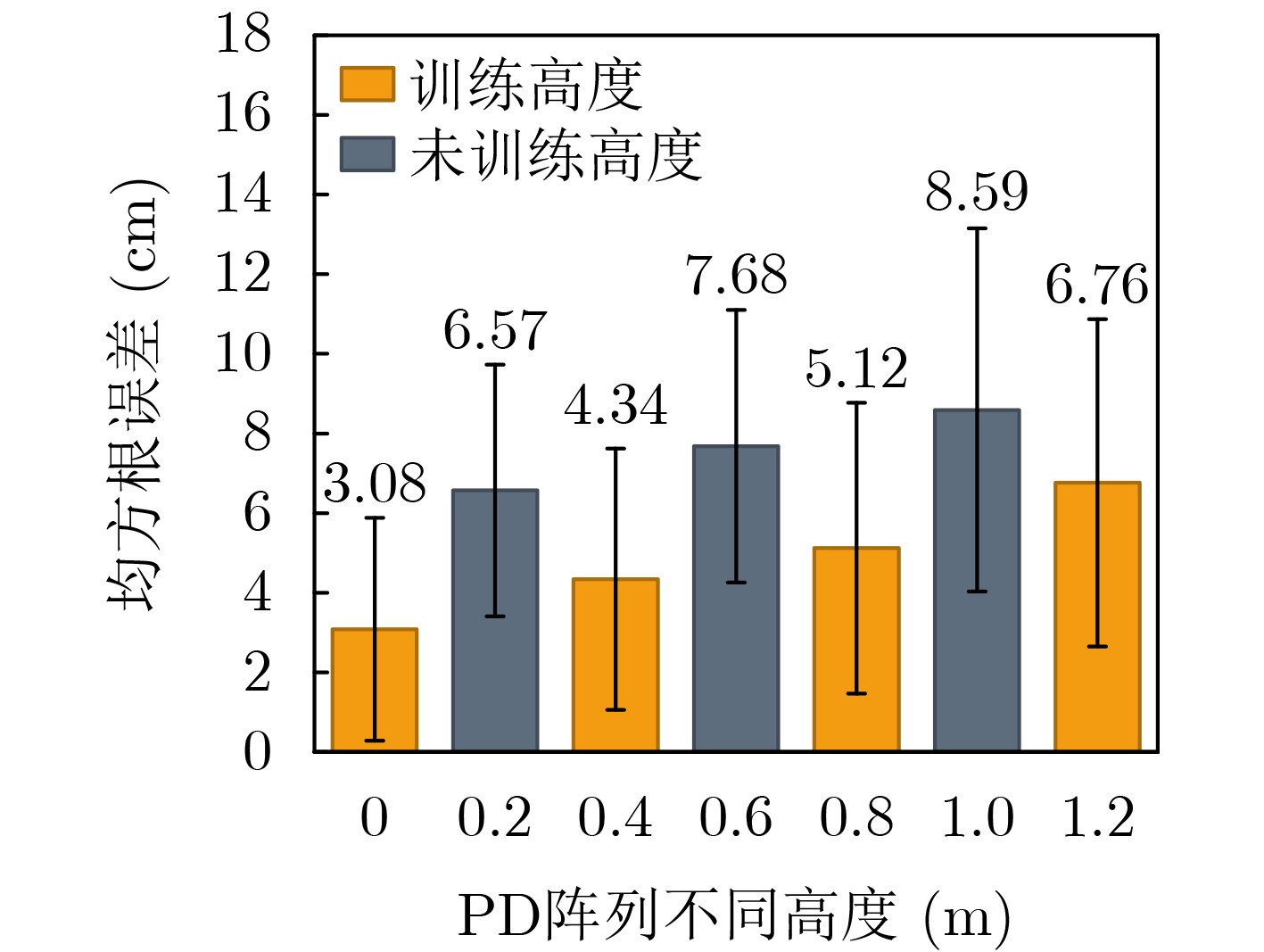
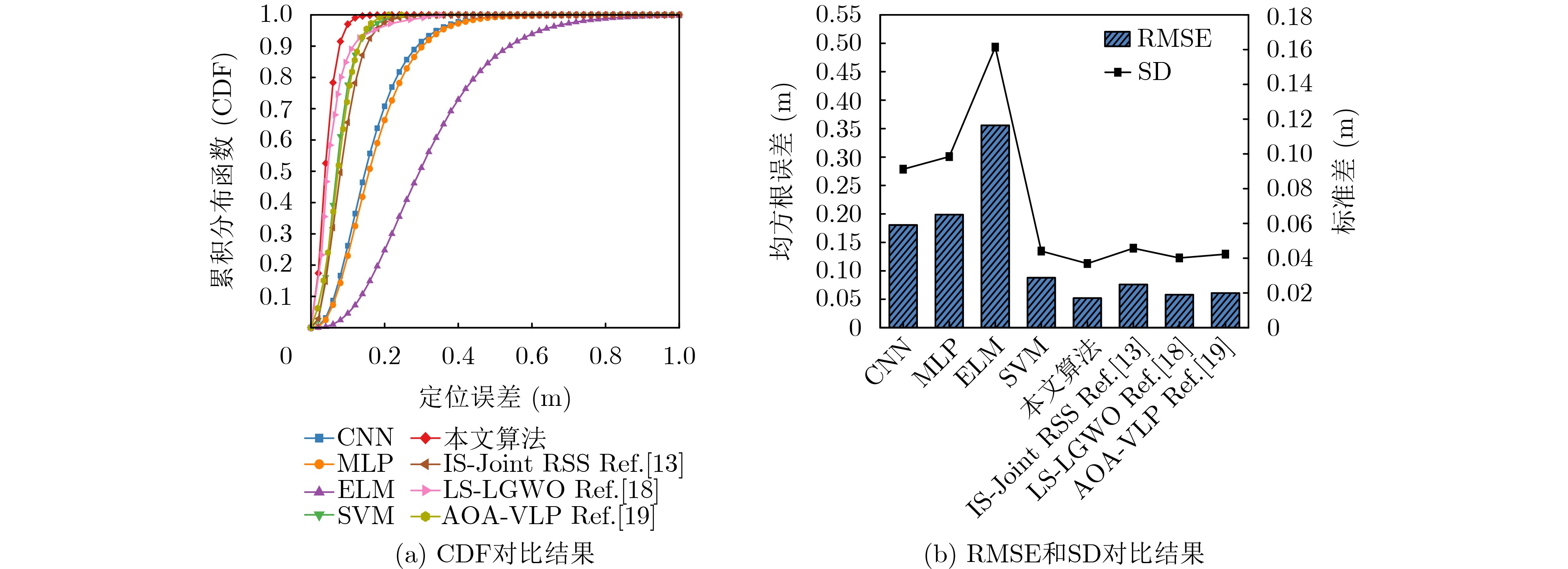
Objective Traditional visible light positioning (VLP) methods based on received signal strength (RSS) suffer from instability when the receiver experiences orientation perturbations, which disrupt the correspondence between optical power and spatial position, making reliable three-dimensional (3D) positioning difficult to achieve. Existing approaches typically rely on inertial measurement units (IMUs) to obtain orientation information; however, sensor fusion increases system complexity and hardware cost and introduces cumulative errors. To address these issues, this paper proposes a positioning method that fuses cosine-of-incidence-angle estimation based on a photodiode (PD) array with RSS information, enabling high-accuracy 3D indoor positioning under receiver orientation perturbations. Methods In the proposed fusion-based positioning method, a multi-PD array structure is first adopted, and a local coordinate system (LCS) is established at the array center. Constraint equations are then constructed based on the differences in received optical power among PDs in the array. A Gauss–Newton iterative algorithm is employed to estimate the incident light direction vector. By exploiting the orthogonal rotation invariance between the LCS and the global coordinate system (GCS), the cosine of the incident angle is estimated without the need for orientation sensors. Subsequently, a serial CNN–MLP fusion network is constructed, in which the estimated incident-angle cosine is introduced as an additional positioning feature on top of RSS-based localization. The network jointly models the RSS and incident-angle cosine information received by the PD array and maps them to 3D spatial coordinates. Finally, training samples are generated using Latin hypercube sampling (LHS) to uniformly sample spatial positions and orientation dimensions, thereby improving the representativeness of the training dataset. Results and Discussions Simulation experiments are conducted in a 4 m × 4 m × 2.5 m indoor environment. First, the effects of different numbers of PDs and tilt angles on the accuracy of incident-angle cosine estimation and spatial coverage are evaluated ( Fig. 6 ), and the cumulative distribution functions (CDFs) of positioning errors under different array configurations are compared (Fig. 7 ). The results show that a 3-PD array with a tilt angle of 40° achieves the best balance among cost, coverage, and positioning accuracy. Next, positioning performance under different receiver tilt angles is analyzed. When the tilt angle is small, more than 70% of positioning errors are below 5 cm; even when the receiver is tilted up to 55°, the average error remains within 11.7 cm (Fig. 8 ). Error component comparisons indicate that the error along the Z-axis is significantly smaller than those along the X and Y axes (Fig. 9 ). Further tests are conducted at a height of 0.0 m covered by the training data and at an unseen height of 0.6 m not included in the training set (Fig. 10 ). The results demonstrate that the proposed model does not exhibit strong dependence on a specific height plane and maintains stable 3D positioning performance at unseen heights. Finally, the proposed method is compared with related positioning schemes. It outperforms existing methods in terms of CDF convergence speed, RMSE, and standard deviation (Fig. 11 ), achieving an average error reduction of approximately 2.5 cm and an RMSE reduction of 31.58% compared with Ref. [12 ].Conclusions This paper estimates the cosine of the incident angle at the receiver by exploiting differences in the optical power received by different PDs in an array and introduces this cosine value as a joint positioning feature into conventional RSS-based localization, thereby alleviating the instability of position mapping caused by relying solely on RSS under random receiver perturbations. By further combining the spatial feature extraction capability of CNNs with the nonlinear modeling strength of MLPs, the proposed method effectively maps positioning features to 3D spatial coordinates. The approach reduces reliance on orientation sensors such as IMUs while overcoming the susceptibility of traditional geometric positioning methods to noise and high-dimensional nonlinear features. Under varying heights and receiver orientations, the proposed algorithm demonstrates significant advantages in both positioning accuracy and stability. -
表 1 仿真参数
参数 值 参数 值 参数 值 参数 值 参数 值 $ {P}_{\text{t},i} $/W 10 $ {\Phi }_{1/2} $/(°) 60 $ dA $/m2 0.01 B/(MHz) 10 T/(k) 290 A/cm² 1 $ {g}_{s}({\psi }_{i,j}) $/$ {T}_{s}({\psi }_{i,j}) $ 1 r/cm 2 $ {I}_{\text{bg}} $/μA 10 $ {R}_{f} $/$ \text{k}\Omega $ 100 $ {\psi }_{c} $ /(°) 75 $ \rho $ 0.6 k/(J/k) 1.38×10−23 $ {G}_{t} $/(A/V) 0.01 $ {g}_{m} $/(ms) 10  下载: 导出CSV
下载: 导出CSV
表 2 神经网络训练参数
参数 值 参数 值 参数 值 训练样本数 4000 ×60学习率调整策略 5 epoch×0.5 损失函数 MSE 数据集划分 70%/15%/15% 优化器 Adam 验证频率 0.2epoch 初始学习率 0.001 正则化系数 0.0001 - -
下载: 导出CSV
表 3 不同PD阵列设计的可见光定位性能评估
PD阵列 向量维度 均方根误差/m 平均误差/m 轮数 训练时间/min 3 24 0.052 0.046 47 20:05 4 32 0.047 0.043 45 19:01 5 40 0.046 0.041 44 18:40 6 48 0.044 0.038 43 18:12
下载: 导出CSV
-
[1] QI Lin, LIU Yu, YU Yue, et al. Current status and future trends of meter-level indoor positioning technology: A review[J]. Remote Sensing, 2024, 16(2): 398. doi: 10.3390/rs16020398. [2] NGUYEN Q D M, LUKITO W D, LIU Xuemeng, et al. Deep learning-empowered RF sensing in outdoor environments: Recent advances, challenges, and future directions[J]. Electronics, 2024, 14(1): 125. doi: 10.3390/electronics14010125. [3] 杨瑞鑫, 张冠杰, 马帅, 等. 多LED可见光定位通信一体化稳健功率分配[J]. 电子与信息学报, 2024, 46(4): 1186–1195. doi: 10.11999/JEIT230406.YANG Ruixin, ZHANG Guanjie, MA Shuai, et al. Robust power allocation for multi-LED integrated visible light positioning and communication[J]. Journal of Electronics & Information Technology, 2024, 46(4): 1186–1195. doi: 10.11999/JEIT230406. [4] DO T H and YOO M. An in-depth survey of visible light communication based positioning systems[J]. Sensors, 2016, 16(5): 678. doi: 10.3390/s16050678. [5] LEPETIT V, MORENO-NOGUER F, and FUA P. EPnP: An accurate O(n) solution to the PnP problem[J]. International Journal of Computer Vision, 2009, 81(2): 155–166. doi: 10.1007/s11263-008-0152-6. [6] 苏辰希, 张艳语, 李盾, 等. 基于空间优化的室内可见光定位方法[J]. 光学学报, 2024, 44(13): 1306006. doi: 10.3788/AOS240587.SU Chenxi, ZHANG Yanyu, LI Dun, et al. Indoor visible light positioning method based on spatial optimization[J]. Acta Optica Sinica, 2024, 44(13): 1306006. doi: 10.3788/AOS240587. [7] BARCO ALVÁREZ J, TORRES ZAFRA J C, BETANCOURT J S, et al. Navigating in light: Precise indoor positioning using trilateration and angular diversity in a semi-spherical photodiode array with visible light communication[J]. Electronics, 2024, 13(18): 3597. doi: 10.3390/electronics13183597. [8] WEI Fen, WU Yi, XU Shiwu, et al. Accurate visible light positioning technique using extreme learning machine and meta-heuristic algorithm[J]. Optics Communications, 2023, 532: 129245. doi: 10.1016/j.optcom.2022.129245. [9] 赵黎, 韩中达, 张峰. 基于神经网络的可见光室内立体定位研究[J]. 中国激光, 2021, 48(7): 0706004. doi: 10.3788/CJL202148.0706004.ZHAO Li, HAN Zhongda, and ZHANG Feng. Research on stereo location in visible light room based on neural network[J]. Chinese Journal of Lasers, 2021, 48(7): 0706004. doi: 10.3788/CJL202148.0706004. [10] JEONG E M, YANG S H, KIM H S, et al. Tilted receiver angle error compensated indoor positioning system based on visible light communication[J]. Electronics Letters, 2013, 49(14): 890–892. doi: 10.1049/el.2013.1368. [11] STEENDAM H, WANG T Q, and ARMSTRONG J. Theoretical lower bound for indoor visible light positioning using received signal strength measurements and an aperture-based receiver[J]. Journal of Lightwave Technology, 2017, 35(2): 309–319. doi: 10.1109/JLT.2016.2645603. [12] HUA Luchi, ZHUANG Yuan, and YANG Jun. Deep learning-based fusion of visible light positioning and IMU sensors[C]. 2021 20th International Conference on Ubiquitous Computing and Communications, London, UK, 2021: 565–571. doi: 10.1109/IUCC-CIT-DSCI-SmartCNS55181.2021.00093. [13] CHEN Feng, HUANG Nuo, and GONG Chen. RSS-based visible light positioning with unknown receiver tilting angle: Robust design and experimental demonstration[J]. Optics Express, 2022, 30(22): 39775–39793. doi: 10.1364/OE.467663. [14] KOMINE T and NAKAGAWA M. Fundamental analysis for visible-light communication system using LED lights[J]. IEEE Transactions on Consumer Electronics, 2004, 50(1): 100–107. doi: 10.1109/TCE.2004.1277847. [15] WANG Jinyuan, LI Qinglin, ZHU Jianxia, et al. Impact of receiver's tilted angle on channel capacity in VLCs[J]. Electronics Letters, 2017, 53(6): 421–423. doi: 10.1049/el.2016.4657. [16] WANG Lixuan and GUO Caili. Indoor visible light localization algorithm with multi-directional PD array[C]. 2017 IEEE Globecom Workshops, Singapore, Singapore, 2017: 1–6. doi: 10.1109/glocomw.2017.8269149. [17] 魏政帅, 薛琦, 孙晓红, 等. 基于自适应滤波器的高精度可见光定位方法[J]. 光通信技术, 2021, 45(9): 5–10. doi: 10.13921/j.cnki.issn1002-5561.2021.09.002.WEI Zhengshuai, XUE Qi, SUN Xiaohong, et al. High precision visible light positioning method based on adaptive filter[J]. Optical Communication Technology, 2021, 45(9): 5–10. doi: 10.13921/j.cnki.issn1002-5561.2021.09.002. [18] WANG Zhenyu, LIANG Zhonghua, LIU Ren, et al. Design and performance analysis for indoor visible light positioning with single LED and single-tilted-rotatable PD[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 5502414. doi: 10.1109/TIM.2024.3383461. [19] STEENDAM H. A 3-D positioning algorithm for AOA-based VLP With an aperture-based receiver[J]. IEEE Journal on Selected Areas in Communications, 2018, 36(1): 23–33. doi: 10.1109/JSAC.2017.2774478. -

 下载:
下载:






图(11) / 表(3)
计量
- 文章访问数: 295
- HTML全文浏览量: 130
- PDF下载量: 23
- 被引次数: 0
