

A Fault Diagnosis Method for Flight Control Systems Combining Pose-Invariant Features and a Semi-Supervised RDC-GAN Model
-
摘要: 无人机的飞控系统故障诊断主要面临以下两大挑战:其一,作为新兴的空中飞行平台,无人机可用于故障诊断的有效训练数据规模有限,存在显著的训练数据匮乏问题;其二,作为高机动性空中飞行平台,无人机在不同飞行姿态下的数据分布差异显著,存在数据环境高度变动的问题。针对这两种挑战,该文提出了一种结合姿态不变性特征和半监督复兴稠密生成对抗分类网络(RDC-GAN)模型的飞控系统故障诊断方法。方法首先通过基于微分平坦的数据筛选将无人机数据分为姿态相关数据和姿态不相关数据;对于姿态相关数据,利用经验模态挤压激励网络(EMD-SENet)提取对姿态变化具有鲁棒性的姿态不变性特征;之后采用自适应特征融合模块将姿态不相关数据、姿态相关数据和提取到的姿态不变性特征进行加权融合;最后将融合特征送入半监督RDC-GAN模型进行两阶段训练:第1阶段采用无监督训练,利用大量无标签数据对模型网络权重初始化,第2阶段采用有监督训练,通过少量有标签数据进一步对网络权重进行微调,从而实现仅用少量有效数据就能精确诊断出无人机飞控故障的目的。方法在公开数据集RflyMad上整体精度达到了95.71%,在真机故障诊断实验中的整体精度达到了92.78%。Abstract:
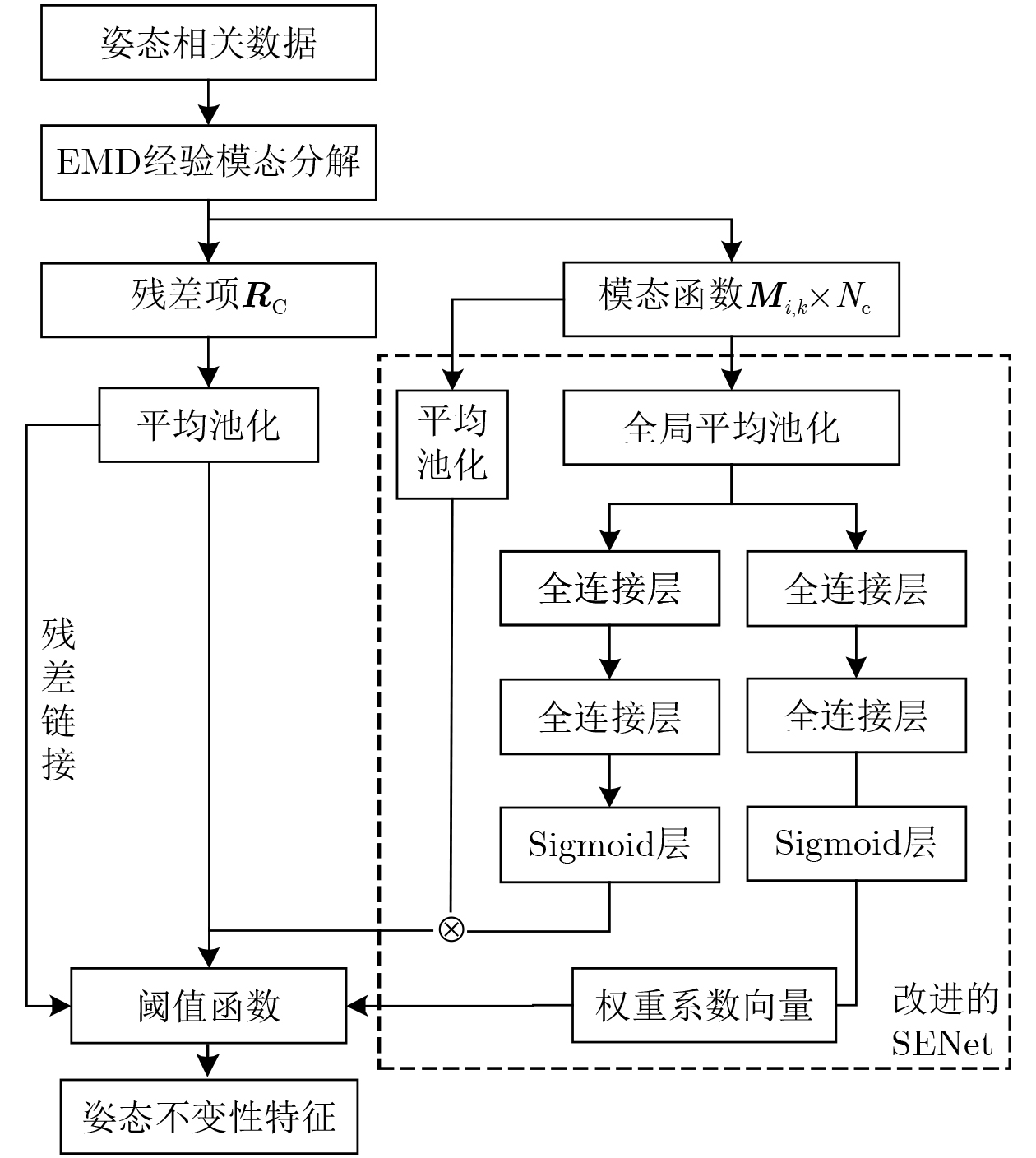
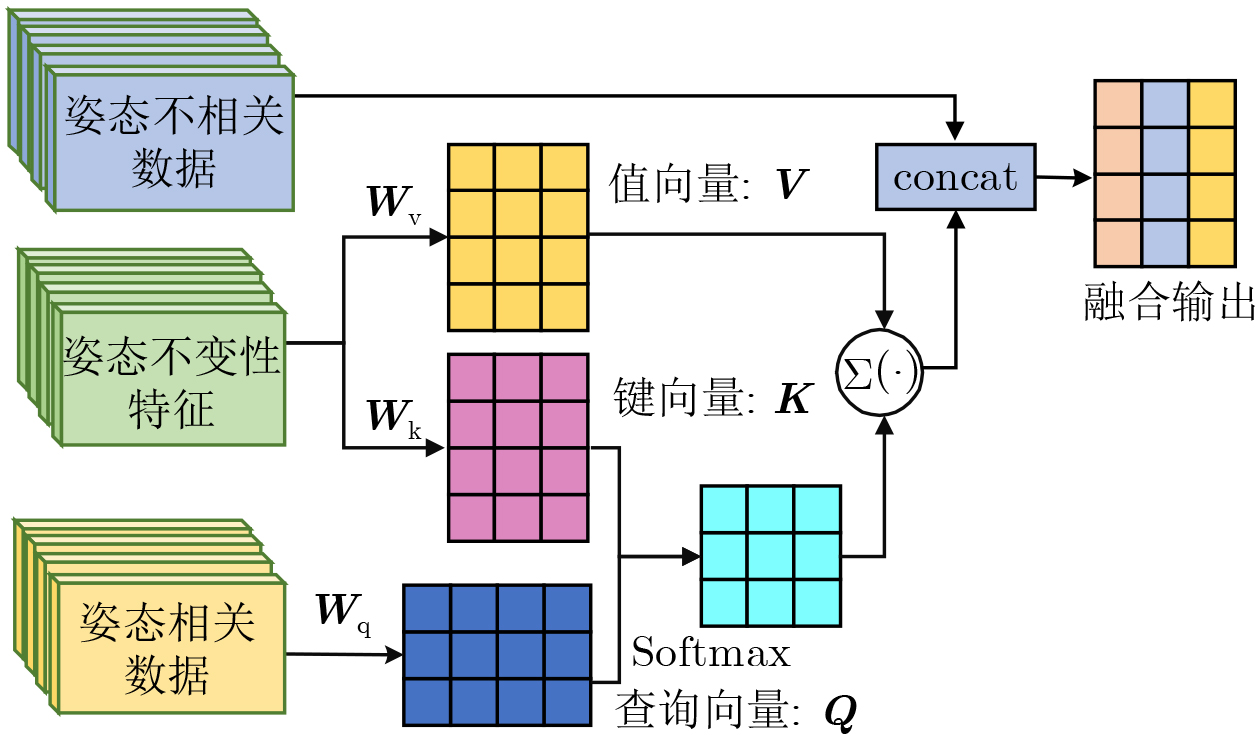
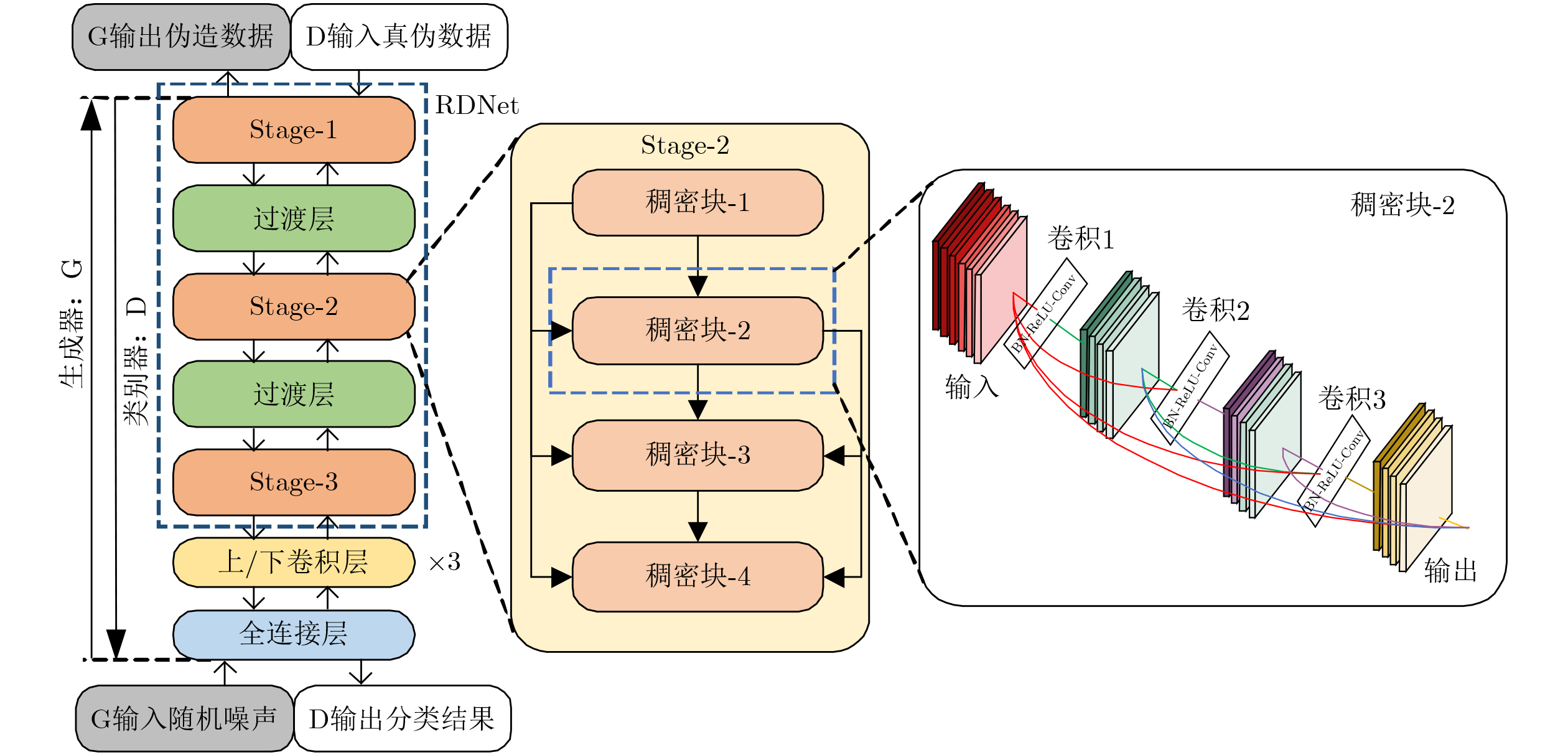
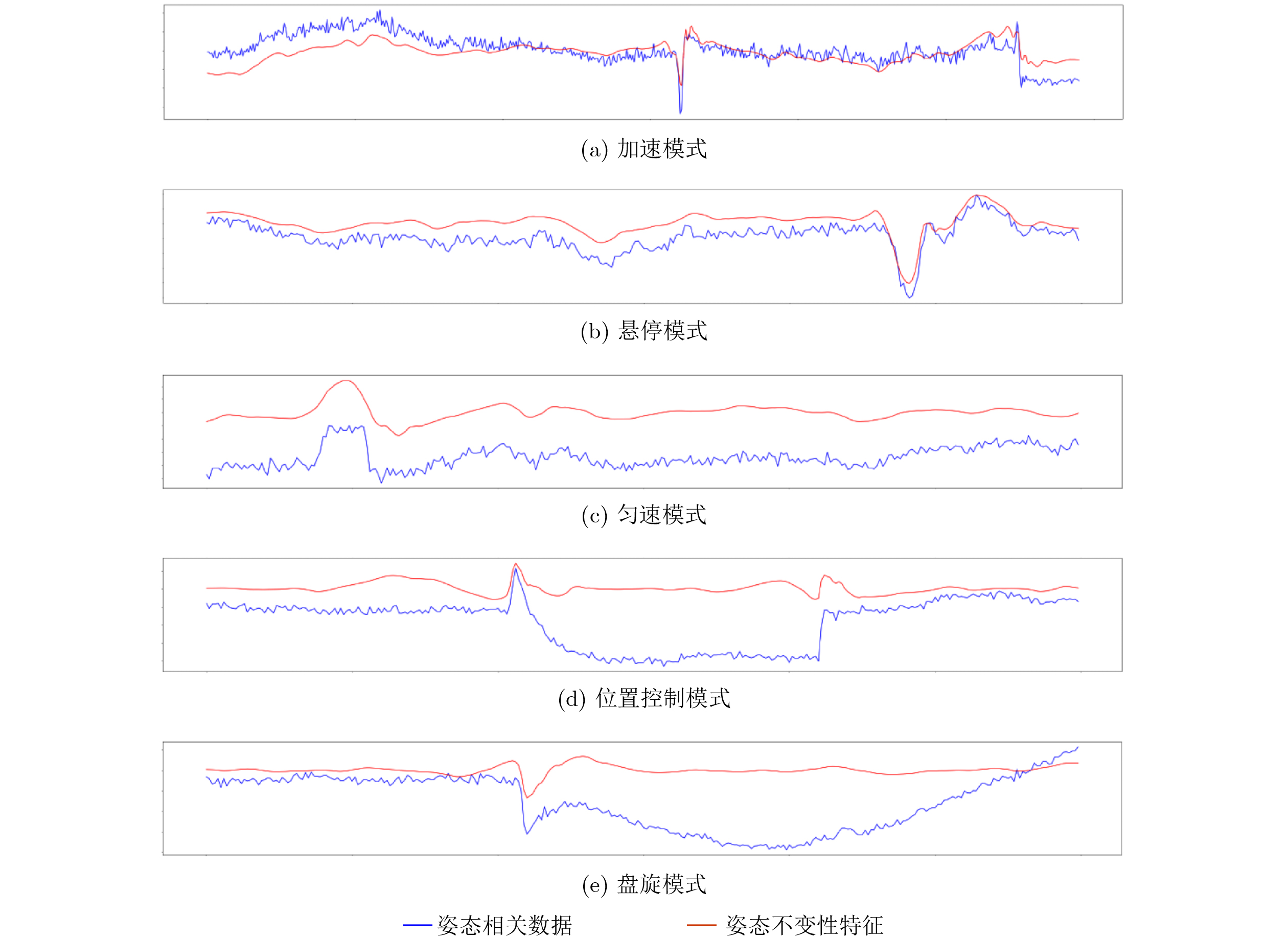
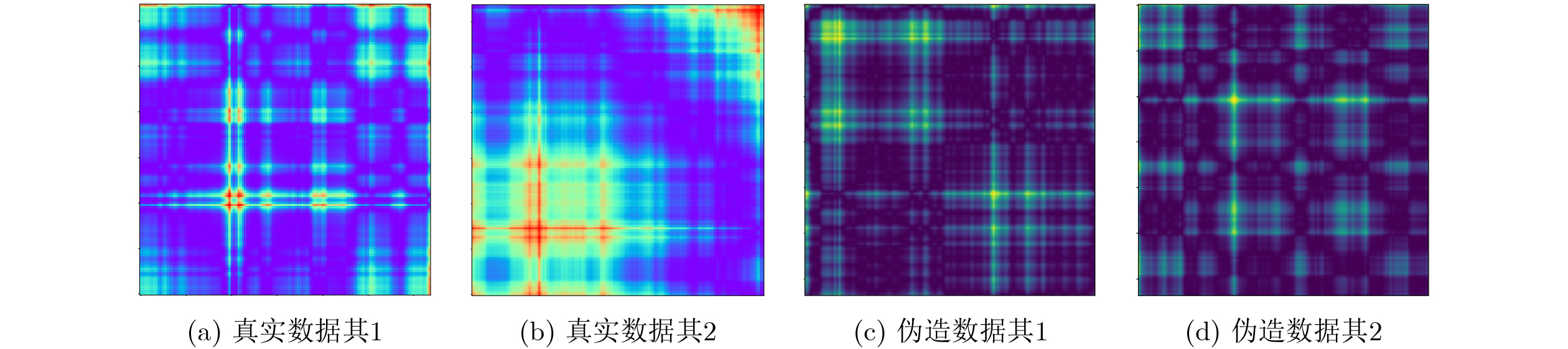
Objective In recent years, China has actively promoted the development of the low-altitude economy, leading to the increasingly widespread application of drones across multiple industries. As highly complex aerial systems, Unmanned Aerial Vehicles (UAVs) are susceptible to various failures during operation. The flight control system, which serves as the core of UAV flight operations, may develop faults that are less evident than physical damage to components such as motors or propellers. However, such faults can directly cause flight instability or complete loss of control. Fault diagnosis of UAV flight control systems faces two major challenges. First, as an emerging aerial platform, UAVs have far fewer effectively accumulated training samples than traditional diagnostic targets such as bearings, resulting in data scarcity. Second, owing to strong maneuverability, UAVs exhibit substantial variations in data distribution under different flight attitudes, which limits the diagnostic accuracy of most existing models under rapidly changing operating conditions. Therefore, the development of an effective fault diagnosis method for UAV flight control systems is of both academic interest and practical engineering value. Methods A fault diagnosis method for flight control systems based on pose-invariant features and a semi-supervised Reloaded Dense Generative Adversarial Classification Network (RDC-GAN) is proposed. The overall framework is illustrated in Fig. 1 . Flight logs collected from the UAV are used as raw diagnostic data. After data cleaning, a differential flatness-based data selection method is applied to separate the flight data into pose-dependent data and pose-independent data. For pose-dependent data, Empirical Mode Decomposition-Squeeze Excitation Network (EMD-SENet) is adopted to extract pose-invariant features, as shown inFig. 3 . An adaptive feature fusion module is then used to perform weighted fusion of pose-independent data, pose-invariant features, and pose-dependent data, as illustrated inFig. 4 . The fused features are subsequently input into a semi-supervised RDC-GAN diagnostic model, whose architecture is presented inFig. 4 . Model training is conducted in two stages. In the first stage, unsupervised training is performed to initialize the network parameters using a large set of unlabeled samples. In the second stage, supervised training is carried out with a small number of labeled samples, enabling accurate fault diagnosis under limited labeling conditions.Results and Discussions The proposed method is first validated on the publicly available RflyMad dataset, which contains magnetometer fault, accelerometer fault, gyroscope fault, Global Navigation Satellite System (GNSS) fault, and no-fault data under five flight attitude modes. Fig. 5 and Fig.6 illustrate the pose-invariant features extracted by EMD-SENet and the synthetic samples generated by the RDC-GAN generator, respectively. Diagnostic performance is evaluated using Overall Accuracy (OA), Average Accuracy (AA), and the Kappa coefficient, in addition to class-wise accuracy for each fault category. The results on the RflyMad dataset are summarized inTable 3 . The proposed method achieves 95.71% OA, 95.32% AA, and a Kappa coefficient of 95.41%, exceeding the second-best comparative method by 2.17%, 2.42%, and 2.40%, respectively. For real-flight experiments, a fault injection approach based on a redundant positioning system is designed. A motion capture system and an Ultra-WideBand (UWB) four-base-station positioning system are employed to ensure experimental reliability and operational safety. The experimental setup is shown inFig. 11 . Online real-flight diagnostic results are presented inFig. 13 , with an OA of 92.78%. Fault diagnosis time is reported inTable 5 , and false alarm statistics are provided inTable 6 .Conclusions A fault diagnosis method for flight control systems that integrates pose-invariant features with a semi-supervised RDC-GAN model is presented to address data scarcity and flight attitude-induced distribution variation in UAV diagnostics. Differential flatness-based data selection is used to distinguish pose-dependent data from pose-independent data, and pose-invariant features are extracted using EMD-SENet. An adaptive feature fusion strategy is applied to balance heterogeneous features, and phased semi-supervised training of the RDC-GAN model enables high diagnostic accuracy with a limited number of labeled samples. Experimental validation on the RflyMad dataset and real UAV flight scenarios confirms the effectiveness of the proposed method. -
表 1 改进的RDNet网络结构
层级名称 所包含主要结构 描述 输出特征图尺寸 输入层 / 输入数据 128$ × $128 头卷积层 [4$ * $4 conv]+LayerNorm 改变特征尺寸和通道数 32$ × $32 Staget1 $ \left[\begin{matrix}7*7\mathrm{conv} \\ 1*1_{ }\mathrm{conv} \\ \end{matrix}\right]\times4 $
[1$ * $1 conv] $ × $44个Dense Block
4个Stage内过渡层
增长率6432$ × $32 过渡层 [2$ * $2 conv]+LayerNorm Stage间过渡层 16$ × $16 Staget2 $ \left[\begin{matrix}7*7\mathrm{conv} \\ 1*1_{ }\mathrm{conv} \\ \end{matrix}\right]\times4 $
[1$ * $1 conv] $ × $44个Dense Block
4个Stage内过渡层
增长率10416$ × $16 过渡层 [2$ * $2 conv]+LayerNorm Stage间过渡层 8$ × $8 Staget3 $ \left\{\left[\begin{matrix}7*7\mathrm{conv} \\ 1*1_{ }\mathrm{conv} \\ \end{matrix}\right]\times4\right\}\times4 $
{[1$ * $1 conv] $ × $4}$ × $44组Dense Block
增长率为128
4组Stage内过渡层8$ × $8 输出层 全局池化+LayerNorm
[3$ * $3 conv]$ × $3
全连接层输出结果 1$ × $1  下载: 导出CSV
下载: 导出CSV
表 2 姿态不变性特征(Zsa)和姿态相关数据(Zre)Fisher Score对比
数据类型 统计特征法 向量距离法 Zsa Zre Zsa Zre 磁力计x 125.89 0.28 15.61 2.10 磁力计y 104.16 0.02 12.46 1.08 磁力计z 465.91 4.55 35.37 11.01 陀螺仪x 192.04 28.50 6.40 2.58 陀螺仪y 129.78 9.37 3.47 0.79 陀螺仪z 383.27 8.23 9.76 3.55 加速度计x 4.62 0.17 6.69 2.77 加速度计y 8.66 0.12 2.01 0.55 加速度计z 1.53 0.24 0.66 0.26 均值 186.42 8.54 13.45 2.37
下载: 导出CSV
表 3 各类方法在RflyMad数据集上诊断精度(%)
方法 文献[12]方法 文献[13]方法 文献[14]方法 文献[8]方法 文献[15]方法 文献[16]方法 文献[17]方法 本文方法 GNSS故障 85.31±1.25 92.25±1.51 92.41±1.21 91.21±1.31 90.12±1.42 92.45±0.87 93.21±0.75 95.29±0.58 加速度计故障 87.13±1.52 90.34±1.04 90.27±1.64 90.07±0.93 88.26±1.13 91.63±0.79 91.97±0.77 93.54±0.49 磁力计故障 83.28±0.56 88.92±0.86 89.34±0.87 86.32±0.62 87.18±0.56 91.12±0.64 91.25±0.65 93.51±0.37 陀螺仪故障 85.45±0.43 89.35±1.56 90.15±0.55 88.41±0.97 85.91±0.52 91.87±0.61 92.27±0.48 94.27±0.41 无故障 94.16±0.28 97.39±0.43 97.83±0.29 97.62±0.34 95.56±0.44 97.51±0.32 97.43±0.24 100±0.00 整体精度 88.41±0.86 91.89±0.82 92.15±0.74 91.57±0.76 90.08±0.62 92.84±0.61 93.54±0.51 95.71±0.25 平均精度 87.06±1.07 91.65±1.12 92.04±0.81 90.72±0.59 89.41±0.53 92.53±0.54 92.90±0.45 95.32±0.31 卡帕系数 87.91±0.94 91.56±1.04 92.07±0.78 91.25±0.62 89.52±0.65 92.64±0.59 93.01±0.46 95.41±0.29
下载: 导出CSV
表 4 主干网络模型对比
主干网络 参数量(M) FLOPs(G) 推理耗时(ms) 整体精度(%) 平均精度(%) 卡帕系数(%) RDNet 12.85 1.15 2.94±0.037 95.71±0.25 95.32±0.31 95.41±0.29 ResNet-50 23.51 1.32 1.73±0.024 93.43±0.67 93.25±0.89 93.37±0.73 DenseNet-121 6.96 0.92 4.43±0.051 93.97±0.53 93.51±0.65 93.53±0.68 ConvNeXt-tiny 28.58 1.46 1.35±0.048 94.24±0.49 93.91±0.54 94.08±0.51
下载: 导出CSV
表 5 实机飞行故障诊断时间统计表(s)
飞行状态 匀速模式 盘旋模式 悬停模式 磁力计故障 1.02±0.13 0.94±0.11 1.35±0.11 加速度计故障 1.25±0.14 1.05±0.09 1.41±0.08 陀螺仪故障 0.93±0.08 0.89±0.07 1.15±0.09 GNSS故障 0.62±0.07 0.63±0.08 0.73±0.06
下载: 导出CSV
表 6 实机飞行故障诊断虚警统计表
匀速模式 盘旋模式 悬停模式 磁力计故障 2次 1次 3次 加速度计故障 2次 0次 1次 陀螺仪故障 1次 1次 2次 GNSS故障 0次 0次 0次 总持续时间(s) 4.94 1.33 6.31
下载: 导出CSV
-
[1] SINGH P K and SHARMA A. An intelligent WSN-UAV-based IoT framework for precision agriculture application[J]. Computers and Electrical Engineering, 2022, 100: 107912. doi: 10.1016/j.compeleceng.2022.107912. [2] 林清, 王英勋, 蔡志浩, 等. 国外几型无人机事故统计及分析[C]. 2014(第五届)中国无人机大会论文集, 北京, 2014: 798–805.LIN Qing, WANG Yingxun, CAI Zhihao, et al. Several types of foreign UAV accident statistics and analysis[C]. 2014 (5th) China UAV Conference, Beijing, China, 2014: 798–805. [3] 安雪, 李少波, 张仪宗, 等. 无人机飞控系统故障诊断技术研究综述[J]. 计算机工程与应用, 2023, 59(24): 1–15. doi: 10.3778/j.issn.1002-8331.2305-0137.AN Xue, LI Shaobo, ZHANG Yizong, et al. Review of fault diagnosis techniques for UAV flight control systems[J]. Computer Engineering and Applications, 2023, 59(24): 1–15. doi: 10.3778/j.issn.1002-8331.2305-0137. [4] 熊鹏伟, 李志农, 刘晨宇, 等. 基于自适应边际损失的小样本故障诊断方法[J]. 兵器装备工程学报, 2024, 45(9): 253–260. doi: 10.11809/bqzbgcxb2024.09.032.XIONG Pengwei, LI Zhinong, LIU Chenyu, et al. Fault diagnosis method for small sample based on adaptive margin loss[J]. Journal of Ordnance Equipment Engineering, 2024, 45(9): 253–260. doi: 10.11809/bqzbgcxb2024.09.032. [5] 刘金富, 黄頔, 王文林. 无人机故障诊断研究进展[J]. 控制工程, 2022, 29(3): 428–434. doi: 10.14107/j.cnki.kzgc.20210260.LIU Jinfu, HUANG Di, and WANG Wenlin. Research progress of unmanned aerial vehicle fault diagnosis[J]. Control Engineering of China, 2022, 29(3): 428–434. doi: 10.14107/j.cnki.kzgc.20210260. [6] AVRAM R, ZHANG Xiaodong, and MUSE J. Quadrotor accelerometer and gyroscope sensor fault diagnosis using nonlinear adaptive estimation methods[J]. International Journal of Prognostics and Health Management, 2016, 7(1): 2328–2338. doi: 10.36001/ijphm.2016.v7i1.2328. [7] LI Yang, LIU Zhenbao, JIA Zhen, et al. Fault diagnosis strategy for flight control rudder circuit based on SHAP interpretable analysis optimization transformer with attention mechanism[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 3534214. doi: 10.1109/TIM.2024.3470041. [8] SONG Xiaofei, ZHENG Zewei, GUAN Zhiyuan, et al. Deep learning fault diagnosis in flight control system of carrier-based aircraft[C]. 2022 IEEE 17th International Conference on Control & Automation, Naples, Italy, 2022: 492–497. doi: 10.1109/ICCA54724.2022.9831899. [9] MELLINGER D and KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]. 2011 IEEE International Conference on Robotics and Automation. Shanghai, China, 2011: 2520–2525. doi: 10.1109/ICRA.2011.5980409. [10] KIM D, HEO B, and HAN D. DenseNets reloaded: Paradigm shift beyond ResNets and ViTs[C]. 18th European Conference on Computer Vision. Milan, Italy, 2024: 395–415. doi: 10.1007/978-3-031-72646-0_23. [11] LE Xiangli, JIN Bo, CUI Gen, et al. RflyMAD: A dataset for multicopter fault detection and health assessment[J]. The International Journal of Robotics Research, 2025, 44(7): 1081–1092. doi: 10.1177/02783649241305153. [12] 沈延安, 杨克泉, 陈强. 基于PSO优化小波神经网络的无人机动力系统故障诊断模型[J]. 兵器装备工程学报, 2024, 45(4): 168–175. doi: 10.11809/bqzbgcxb2024.04.021.SHEN Yanan, YANG Kequan, and CHEN Qiang. UAV power based on PSO optimized wavelet neural network system fault diagnosis model[J]. Journal of Ordnance Equipment Engineering, 2024, 45(4): 168–175. doi: 10.11809/bqzbgcxb2024.04.021. [13] 孙菱, 张振宇, 郭健, 等. 基于RF-LSTM模型的无人机执行器故障诊断算法[J]. 南京理工大学学报, 2024, 48(5): 661–668. doi: 10.14177/j.cnki.32-1397n.2024.48.05.014.SUN Ling, ZHANG Zhenyu, GUO Jian, et al. Fault diagnosis algorithm for UAV actuator based on RF-LSTM model[J]. Journal of Nanjing University of Science and Technology, 2024, 48(5): 661–668. doi: 10.14177/j.cnki.32-1397n.2024.48.05.014. [14] XIONG Pengwei, LI Zhinong, LI Yunlong, et al. Fault diagnosis of UAV based on adaptive Siamese network with limited data[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 3531711. doi: 10.1109/TIM.2023.3301898. [15] LI Yang, JIA Zhen, LIU Zhenbao, et al. Interpretable intelligent fault diagnosis strategy for fixed-wing UAV elevator fault diagnosis based on improved cross entropy loss[J]. Measurement Science and Technology, 2024, 35(7): 076110. doi: 10.1088/1361-6501/ad3666. [16] LUO Qinyuan, CHEN Jinglong, ZI Yangyang, et al. A synchronization-induced cross-modal contrastive learning strategy for fault diagnosis of electromechanical systems under semi-supervised learning with current signal[J]. Expert Systems with Applications, 2024, 249: 123801. doi: 10.1016/j.eswa.2024.123801. [17] CHEN Xin, CHEN Zaigang, GUO Liang, et al. Pseudo-label assisted semi-supervised adversarial enhancement learning for fault diagnosis of gearbox degradation with limited data[J]. Mechanical Systems and Signal Processing, 2025, 224: 112108. doi: 10.1016/j.ymssp.2024.112108. [18] HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]. The 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA, 2016: 770–778. doi: 10.1109/CVPR.2016.90. [19] HUANG Gao, LIU Zhuang, VAN DER MAATEN L, et al. Densely connected convolutional networks[C]. The 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA, 2017: 2261–2269. doi: 10.1109/CVPR.2017.243. [20] LIU Zhuang, MAO Hanzi, WU Chaoyuan, et al. A ConvNet for the 2020s[C]. The 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, USA, 2022: 11966–11976. doi: 10.1109/CVPR52688.2022.01167. -


 下载:
下载:



图(13) / 表(6)
计量
- 文章访问数: 681
- HTML全文浏览量: 395
- PDF下载量: 69
- 被引次数: 0
