

Radio Map Enabled Path Planning for Multiple Cellular-Connected Unmanned Aerial Vehicles
-
摘要: 针对多网联无人机协同作业场景中,因冲突规避引发的个体服务质量不均衡问题,该文提出了一种基于无线电地图辅助的协同路径规划方案。该方案以最小化所有无人机中最大任务完成时间与通信断联时间加权和为目标,构建了多无人机路径规划模型,并设计了一种改进的冲突搜索(ICBS)算法进行求解。该算法采用分层搜索架构:高层结构通过引入邻近冲突检测以确保满足安全距离约束,并基于重构的代价函数引导以公平性为导向的冲突消解与路径选择;低层结构则采用基于双向A*的最优路径算法,通过双向并行搜索机制提升寻优效率。仿真结果表明,相较于基准方案,所提方案能够有效降低所有无人机中最大加权时间,显著提升多无人机协同的公平性与整体性能。Abstract:
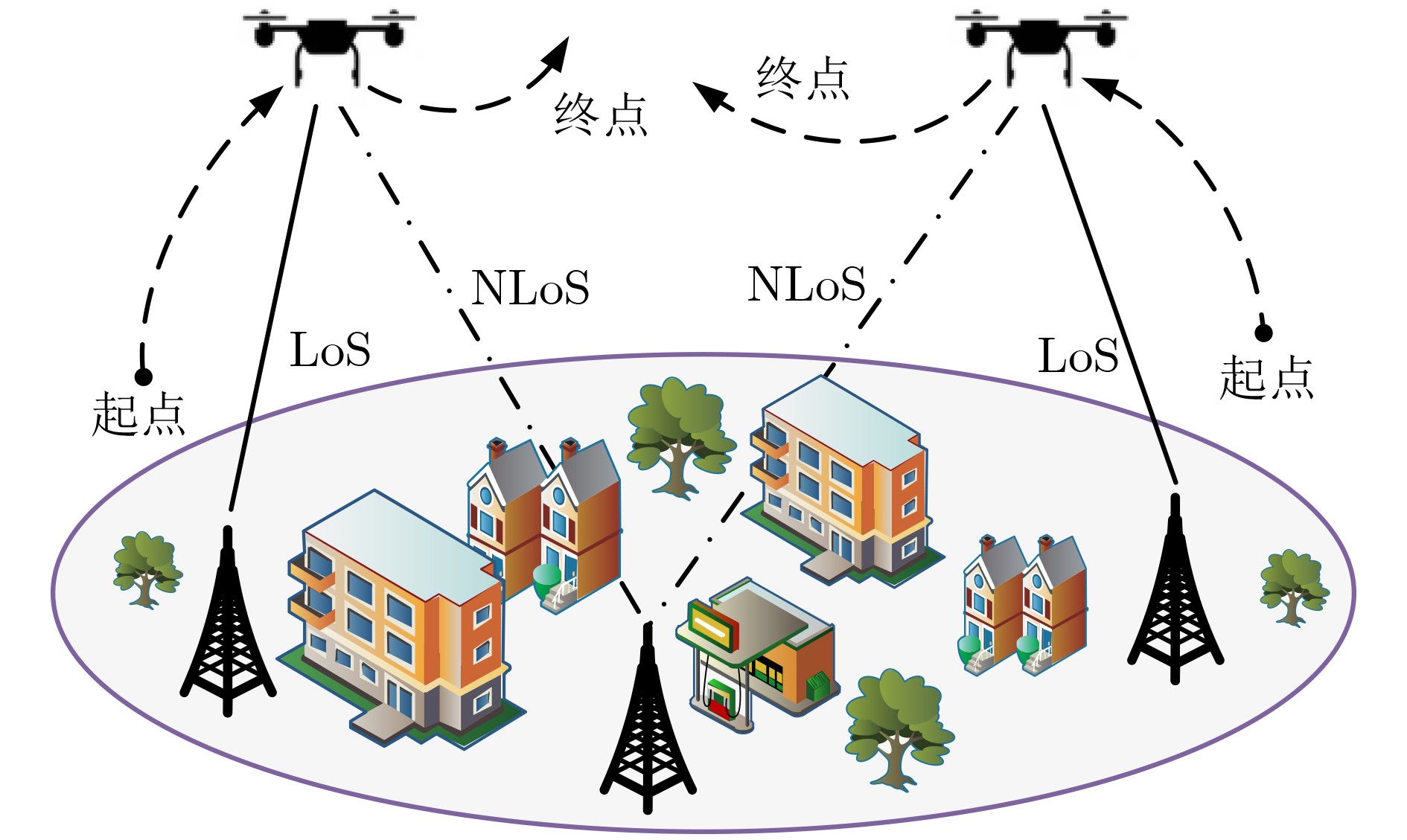
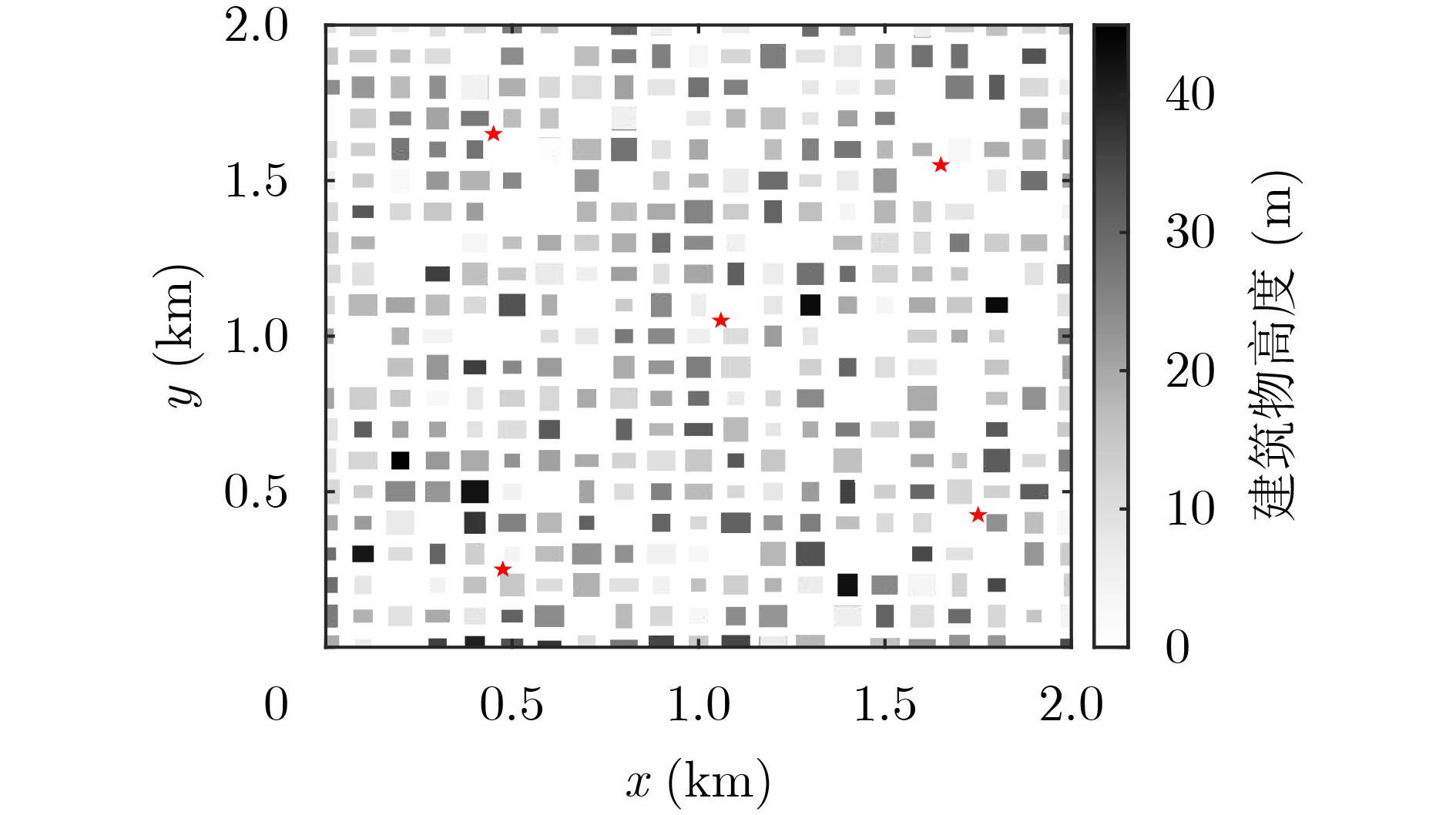
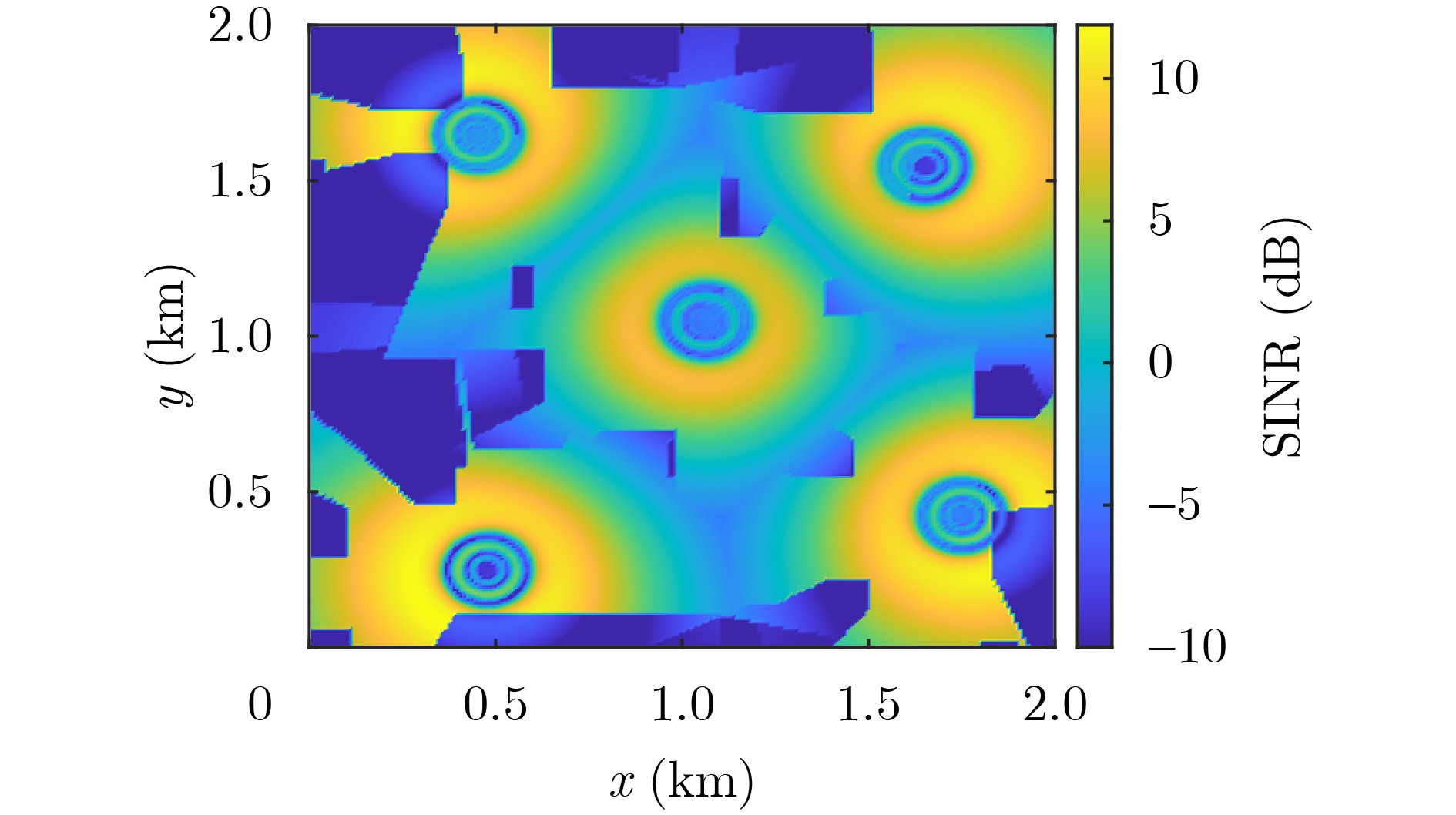
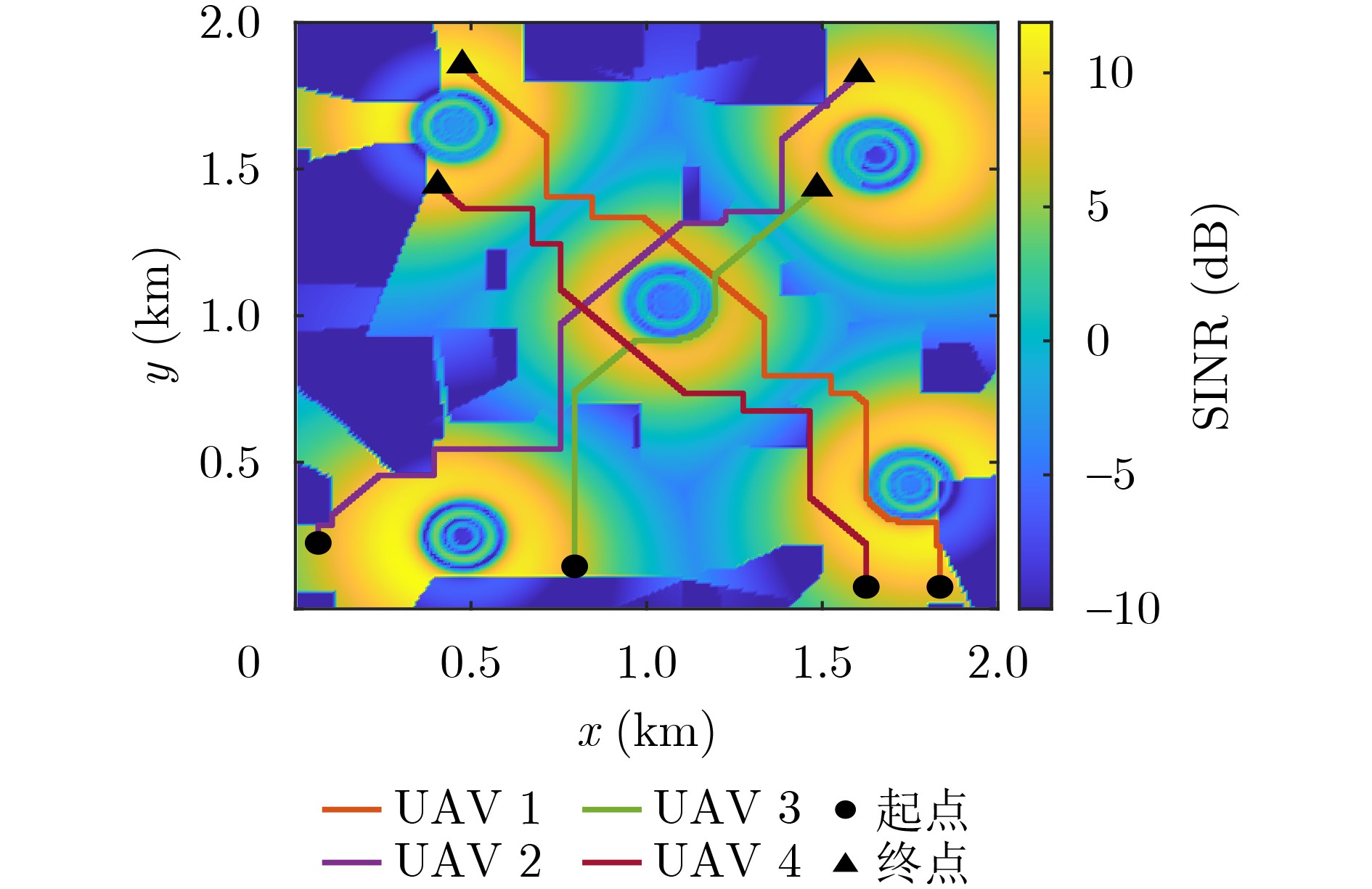
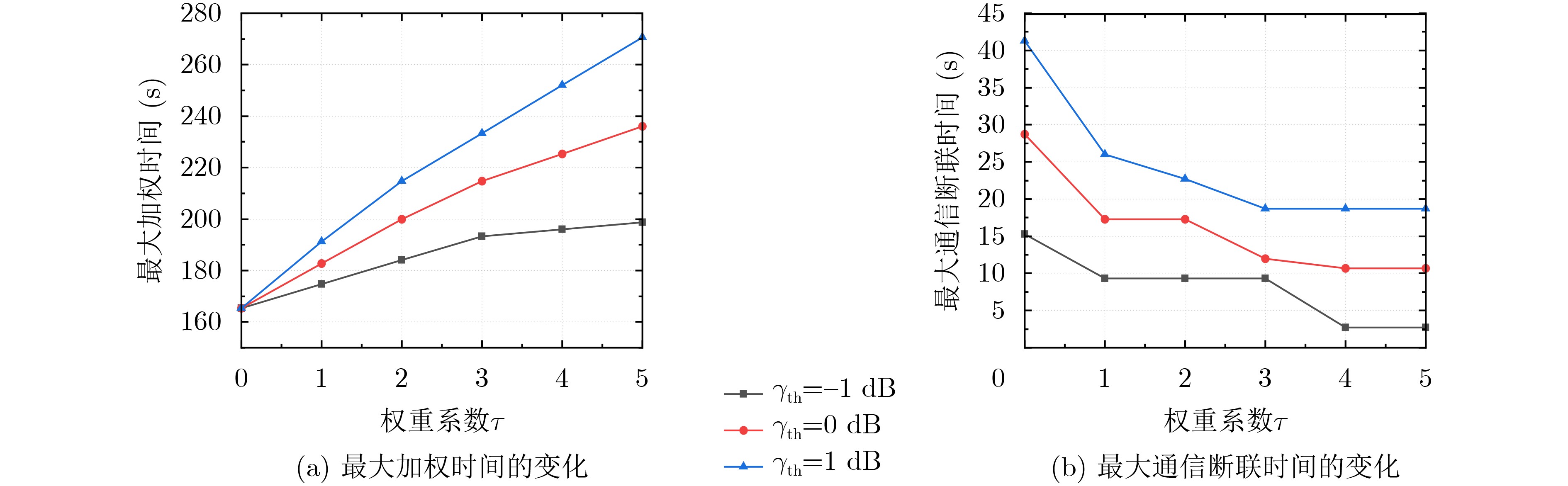
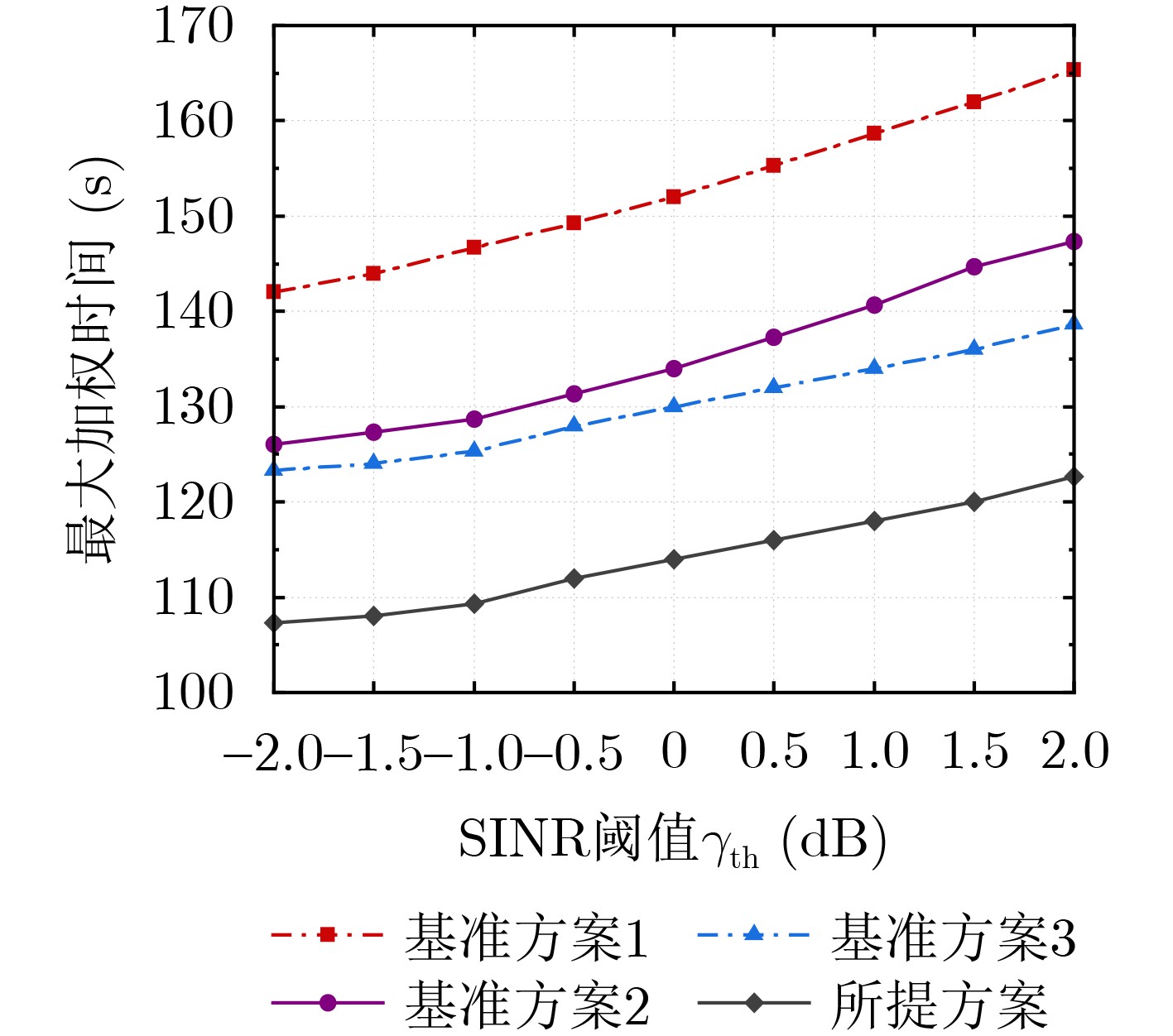
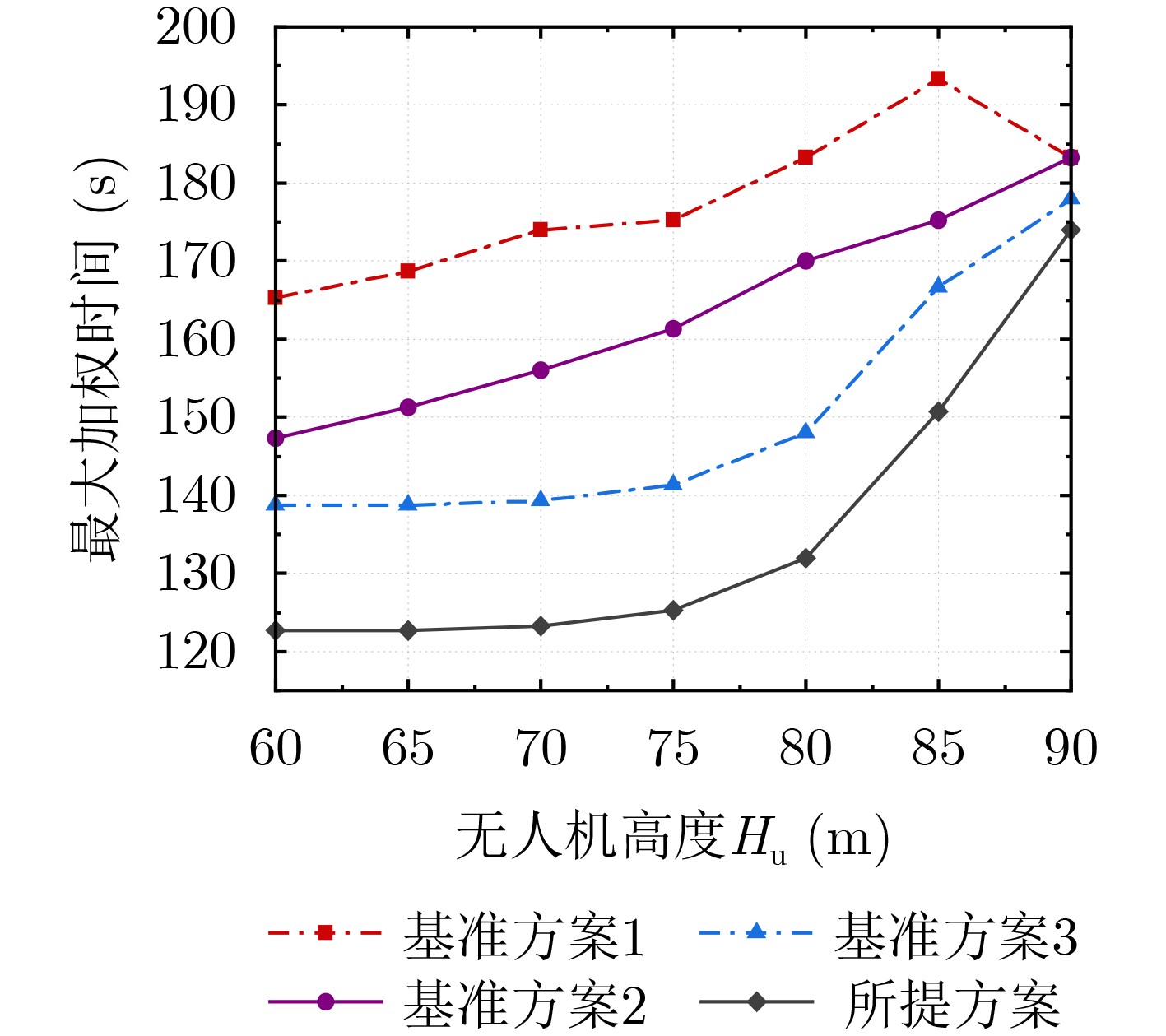
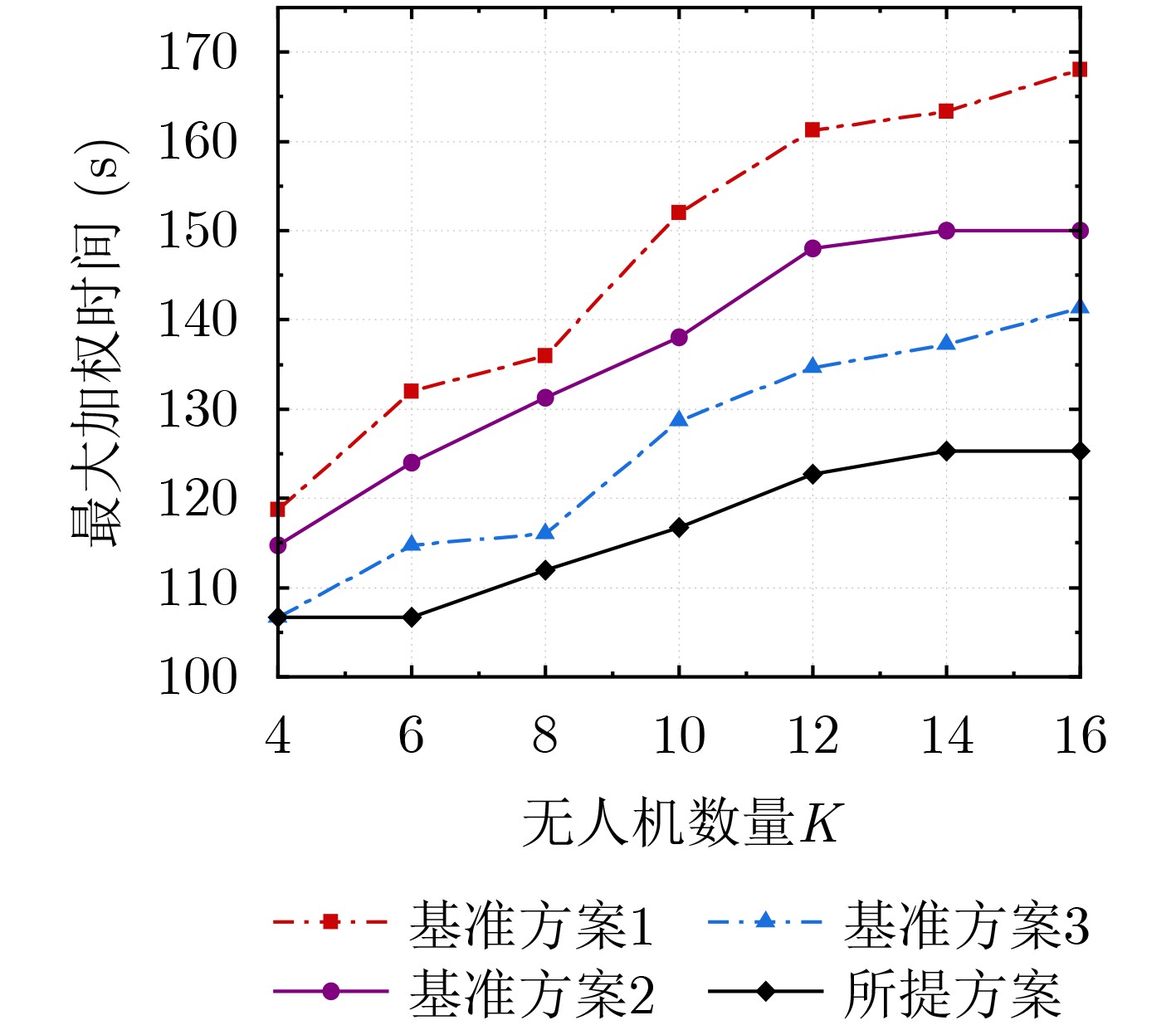
Objective In collaborative operation scenarios of cellular-connected Unmanned Aerial Vehicles (UAVs), conflict avoidance strategies often cause unbalanced service quality. Traditional schemes focus on reducing total task completion time but do not ensure service fairness. To address this issue, a radio map-assisted cooperative path planning scheme is proposed. The objective is to minimize the maximum weighted sum of task completion time and communication disconnection time across all UAVs to improve service fairness in multi-UAV scenarios. Methods A Signal-to-Interference-plus-Noise Ratio (SINR) map is constructed to assess communication quality. The two-dimensional airspace is discretized into grids, and link gain maps are generated through ray tracing and Axis-Aligned Bounding Box detection to determine Line-of-Sight (LoS) or Non-Line-of-Sight (NLoS) conditions. The SINR map is produced by selecting, for each grid, the base station with the highest expected SINR. To solve the optimization problem, an Improved Conflict-Based Search (ICBS) algorithm with a hierarchical structure is developed. At the high-level stage, proximity conflicts are managed to maintain safety distances, and the cost function is reformulated to emphasize fairness by minimizing the maximum weighted time. The low-level stage applies a bidirectional A* algorithm for single-UAV path planning, using parallel search to improve efficiency while meeting the constraints set by the high-level stage. Results and Discussions The proposed scheme is evaluated through simulations across different scenarios. Building heights and positions are shown, where base station locations are marked by red stars and building heights are represented with color gradients from light to dark to indicate increasing height ( Fig. 2 ). The wireless propagation characteristics between UAVs and ground base stations are demonstrated by the SINR map at an altitude of 60 m (Fig. 3 ), which shows significant SINR degradation in areas affected by building blockage and co-channel interference, resulting in communication blind zones. Trajectory planning results for four UAVs at an altitude of 60 m with an SINR threshold of 2 dB show that all UAVs avoid signal blind zones and complete tasks without collision risks under the proposed scheme (Fig. 4 ). The trade-off between task completion time and disconnection time is controlled by the weight coefficient (Fig. 5 ). The maximum weighted time increases monotonically as the weight coefficient increases, whereas the maximum disconnection time decreases. The bidirectional A* algorithm achieves higher computational efficiency than Dijkstra’s and traditional A* algorithms while maintaining optimal solution quality (Table 1 ). All three algorithms yield identical weighted times, confirming the optimality of the bidirectional A* approach, and its runtime is reduced significantly due to parallel search. Compared with three benchmark schemes, the proposed scheme achieves the lowest maximum weighted time for different SINR thresholds (Fig. 6 ). Performance analysis at different UAV altitudes shows that the proposed scheme maintains stable maximum weighted time below 75 m, while sharp increases appear above 75 m due to intensified interference from non-serving base stations (Fig. 7 ). The scalability analysis further shows clear improvements over benchmark schemes, especially when conflicts occur more frequently (Fig. 8 ).Conclusions To address fairness in cellular-connected multi-UAV systems, a radio map-assisted path planning scheme is proposed to minimize the maximum weighted time. Based on a discretized SINR map, an ICBS algorithm is developed. At the high-level stage, proximity conflicts and a reformulated cost function ensure safety and fairness, and at the low-level stage, a bidirectional A* algorithm increases search efficiency. Simulation results show that the proposed scheme lowers the maximum weighted time compared with benchmark schemes and improves fairness and overall multi-UAV collaboration performance. -
Key words:
- Cellular-connected UAV /
- Radio map /
- Path planning /
- Conflict-based search algorithm
-
1 ICBS算法
输入: $ K $架无人机的起点集合$ \left\{{\boldsymbol{u}}_{k,\text{I}}\right\} $,终点集合$ \left\{{\boldsymbol{u}}_{k,\text{F}}\right\} $,SINR地图$ {[\boldsymbol{R}]}_{i,j} $,SINR阈值$ {\gamma }_{\text{th}} $,安全距离$ {d}_{\text{s}} $ 输出: 无冲突的最优路径集合$ \left\{{\boldsymbol{U}}_{k}\right\} $ (1) 初始化:优先队列$ \text{OPEN}\leftarrow \varnothing $,创建根节点$ {\text{CT}}_{\text{root}} $,设置其约束集$ {\text{CT}}_{\text{root}}.{C}\leftarrow \varnothing $,并调用双向A*算法规划初始路径作为$ {\text{CT}}_{\text{root}} $的路
径集合及根据式(21)计算代价$ {\text{CT}}_{\text{root}}.\text{cost} $,将$ {\text{CT}}_{\text{root}} $插入OPEN(2) while $ \text{OPEN}\neq \varnothing $ do (3) 当前节点$ {\text{CT}}_{\text{curr}}\leftarrow \arg {\min }_{\text{CT}\in \text{OPEN}}\text{CT.cost} $,检测$ {\text{CT}}_{\text{curr}} $路径集合中的邻近冲突 (4) if 路径无冲突 then (5) return $ {\text{CT}}_{\text{curr}} $的路径集合$ \left\{{\boldsymbol{U}}_{k}\right\} $ (6) end if (7) for参与冲突的两架无人机 do (8) 创建子节点$ {\text{CT}}_{\text{child}} $,$ {\text{CT}}_{\text{child}}.{C} $继承$ {\text{CT}}_{\text{curr}} $的约束集并添加新冲突约束 (9) 调用双向A*规划算法重新规划路径作为$ {\text{CT}}_{\text{child}} $的路径集合并计算$ {\text{CT}}_{\text{child}}.\text{cost} $,然后将$ {\text{CT}}_{\text{child}} $插入OPEN (10) end for (11) end while  下载: 导出CSV
下载: 导出CSV
表 1 低层路径规划算法的性能对比(s)
任务编号 加权时间成本 算法运行耗时 Dijkstra A* 双向A* 任务1 51.3 0.35 0.13 0.10 任务2 106.0 0.84 0.60 0.35 任务3 136.7 1.31 0.74 0.59
下载: 导出CSV
-
[1] PAN Yan, CHEN Qianwu, ZHANG Nan, et al. Extending delivery range and decelerating battery aging of logistics UAVs using public buses[J]. IEEE Transactions on Mobile Computing, 2023, 22(9): 5280–5295. doi: 10.1109/TMC.2022.3167040. [2] 高思华, 刘宝煜, 惠康华, 等. 信息年龄约束下的无人机数据采集能耗优化路径规划算法[J]. 电子与信息学报, 2024, 46(10): 4024–4034. doi: 10.11999/JEIT240075.GAO Sihua, LIU Baoyu, HUI Kanghua, et al. Energy-efficient UAV trajectory planning algorithm for AoI-constrained data collection[J]. Journal of Electronics & Information Technology, 2024, 46(10): 4024–4034. doi: 10.11999/JEIT240075. [3] SHAO Xiang and WANG Wei. Truthful double auction for multiple secondary operator spectrum sharing with flexible bidding[J]. IEEE Internet of Things Journal, 2025, 12(15): 31813–31823. doi: 10.1109/JIOT.2025.3574306. [4] 陆音, 刘金志, 张珉. 一种模型辅助的联邦强化学习多无人机路径规划方法[J]. 电子与信息学报, 2025, 47(5): 1368–1380. doi: 10.11999/JEIT241055.LU Yin, LIU Jinzhi, and ZHANG Min. A model-assisted federated reinforcement learning method for multi-UAV path planning[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1368–1380. doi: 10.11999/JEIT241055. [5] LI Zuguang, WANG Wei, GUO Jia, et al. Blockchain-empowered dynamic spectrum management for space-air-ground integrated network[J]. Chinese Journal of Electronics, 2022, 31(3): 456–466. doi: 10.1049/cje.2021.00.275. [6] 王威, 佘丁辰, 王加琪, 等. 多模型融合的无人机异常航迹校正方法[J]. 电子与信息学报, 2025, 47(5): 1332–1344. doi: 10.11999/JEIT241026.WANG Wei, SHE Dingchen, WANG Jiaqi, et al. Multi-model fusion-based abnormal trajectory correction method for unmanned aerial vehicles[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1332–1344. doi: 10.11999/JEIT241026. [7] SHAO Xiang, WANG Wei, ZHOU Bo, et al. Joint bandwidth and spectrum usage zones flexible allocation for coexisting multiple UAV networks: An interference graph approach[J]. IEEE Internet of Things Journal, 2025, 12(15): 31141–31153. doi: 10.1109/JIOT.2025.3572085. [8] ZHAN Cheng, HU Han, LIU Zhi, et al. Interference-aware online optimization for cellular-connected multiple UAV networks with energy constraints[J]. IEEE Transactions on Mobile Computing, 2024, 23(12): 13804–13820. doi: 10.1109/TMC.2024.3438759. [9] MEER I A, OZGER M, SCHUPKE D A, et al. Mobility management for cellular-connected UAVs: Model-based versus learning-based approaches for service availability[J]. IEEE Transactions on Network and Service Management, 2024, 21(2): 2125–2139. doi: 10.1109/TNSM.2024.3353677. [10] CHEN Guqiao, CHENG Changjun, XU Xiaoli, et al. Minimizing the age of information for data collection by cellular-connected UAV[J]. IEEE Transactions on Vehicular Technology, 2023, 72(7): 9631–9635. doi: 10.1109/TVT.2023.3249747. [11] GUO Hongzhi, ZHOU Xiaoyi, WANG Jiadai, et al. Intelligent task offloading and resource allocation in digital twin based aerial computing networks[J]. IEEE Journal on Selected Areas in Communications, 2023, 41(10): 3095–3110. doi: 10.1109/JSAC.2023.3310067. [12] 陈可欣, 王威, 肖江浩, 等. 速率公平的分布式无人机资源分配方法[J]. 西安电子科技大学学报, 2025, 52(3): 48–60. doi: 10.19665/j.issn1001-2400.20250506.CHEN Kexin, WANG Wei, XIAO Jianghao, et al. Rate fairness oriented distributed resource allocation for UAVs[J]. Journal of Xidian University, 2025, 52(3): 48–60. doi: 10.19665/j.issn1001-2400.20250506. [13] ZENG Yong, XU Xiaoli, JIN Shi, et al. Simultaneous navigation and radio mapping for cellular-connected UAV with deep reinforcement learning[J]. IEEE Transactions on Wireless Communications, 2021, 20(7): 4205–4220. doi: 10.1109/TWC.2021.3056573. [14] ZHANG Shuowen and ZHANG Rui. Trajectory design for cellular-connected UAV under outage duration constraint[C]. 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 2019: 1–6. doi: 10.1109/ICC.2019.8761259. [15] KHAMIDEHI B and SOUSA E S. Power efficient trajectory optimization for the cellular-connected aerial vehicles[C]. 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 2019: 1–6. doi: 10.1109/PIMRC.2019.8904357. [16] AL-HOURANI A, KANDEEPAN S, and LARDNER S. Optimal LAP altitude for maximum coverage[J]. IEEE Wireless Communications Letters, 2014, 3(6): 569–572. doi: 10.1109/LWC.2014.2342736. [17] BI Suzhi, LYU Jiangbin, DING Zhi, et al. Engineering radio maps for wireless resource management[J]. IEEE Wireless Communications, 2019, 26(2): 133–141. doi: 10.1109/MWC.2019.1800146. [18] ZHANG Shuowen and ZHANG Rui. Radio map-based 3D path planning for cellular-connected UAV[J]. IEEE Transactions on Wireless Communications, 2021, 20(3): 1975–1989. doi: 10.1109/TWC.2020.3037916. [19] ZHAN Cheng and ZENG Yong. Energy minimization for cellular-connected UAV: From optimization to deep reinforcement learning[J]. IEEE Transactions on Wireless Communications, 2022, 21(7): 5541–5555. doi: 10.1109/TWC.2022.3142018. [20] GONG Qiuhu, WU Fahui, YANG Dingcheng, et al. 3D radio map reconstruction and trajectory optimization for cellular-connected UAVs[J]. Journal of Communications and Information Networks, 2023, 8(4): 357–368. doi: 10.23919/JCIN.2023.10387267. [21] CHEN Yujing, YANG Dingcheng, XIAO Lin, et al. Optimal trajectory design for unmanned aerial vehicle cargo pickup and delivery system based on radio map[J]. IEEE Transactions on Vehicular Technology, 2024, 73(8): 11706–11718. doi: 10.1109/TVT.2024.3382170. [22] CHEN Yujia and HUANG Dayu. Joint trajectory design and BS association for cellular-connected UAV: An imitation-augmented deep reinforcement learning approach[J]. IEEE Internet of Things Journal, 2022, 9(4): 2843–2858. doi: 10.1109/JIOT.2021.3093116. [23] 李安, 余传鑫, 陈成. 面向多网联无人机的MADRL协同路径规划算法[J]. 西安电子科技大学学报, 2025, 52(3): 163–175. doi: 10.19665/j.issn1001-2400.20250102.LI An, YU Chuanxin, and CHEN Cheng. Multi-agent deep reinforcement learning assisted cooperative path planning for the multi-cellular-connected unmanned aerial vehicle[J]. Journal of Xidian University, 2025, 52(3): 163–175. doi: 10.19665/j.issn1001-2400.20250102. [24] WU Di, CAO Zhuang, LIN Xudong, et al. A learning-based cooperative navigation approach for multi-UAV systems under communication coverage[J]. IEEE Transactions on Network Science and Engineering, 2025, 12(2): 763–773. doi: 10.1109/TNSE.2024.3517872. [25] XU Xiaoli and ZENG Yong. Cellular-connected UAV: Performance analysis with 3D antenna modelling[C]. 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 2019: 1–6. doi: 10.1109/ICCW.2019.8756719. [26] SHARON G, STERN R, FELNER A, et al. Conflict-based search for optimal multi-agent pathfinding[J]. Artificial Intelligence, 2015, 219: 40–66. doi: 10.1016/j.artint.2014.11.006. [27] 3GPP. TR 36.777 Enhanced LTE support for aerial vehicles[S]. Sophia Antipolis: 3GPP, 2017. -

 下载:
下载:


图(8) / 表(2)
计量
- 文章访问数: 536
- HTML全文浏览量: 292
- PDF下载量: 68
- 被引次数: 0
