

A Large-Scale Multimodal Instruction Dataset for Remote Sensing Agents
-
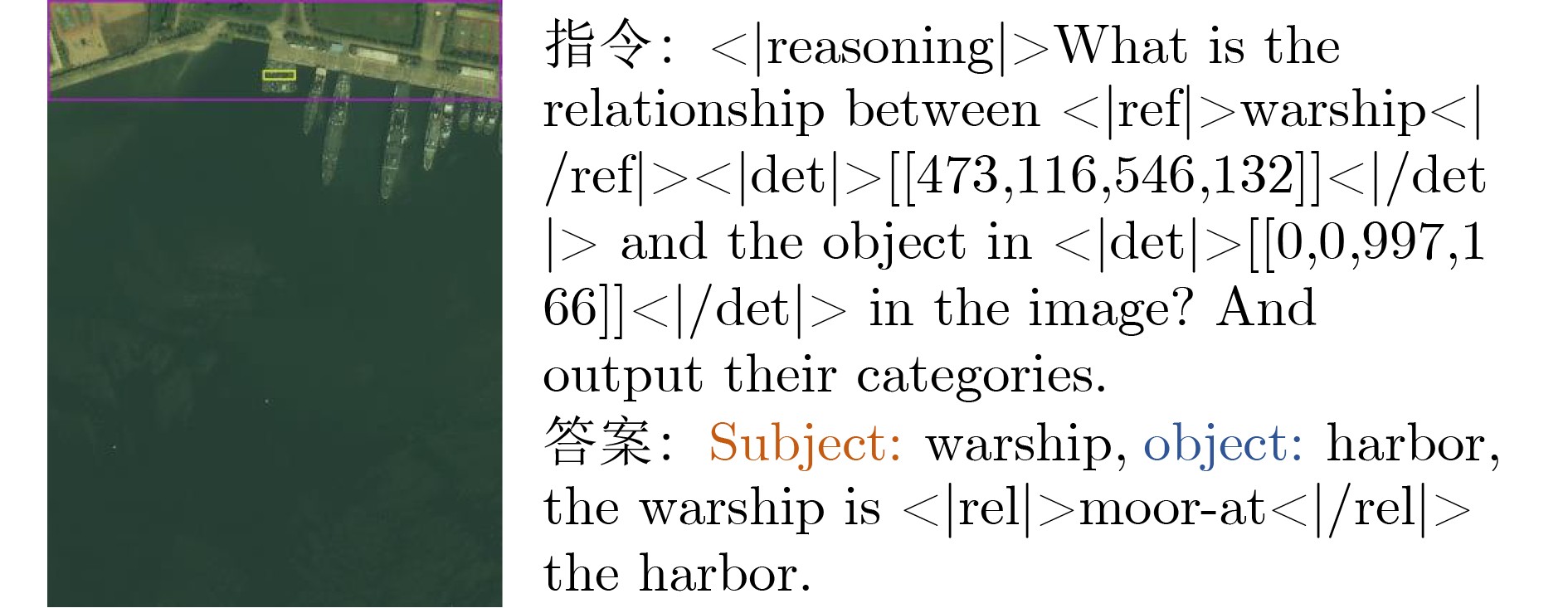
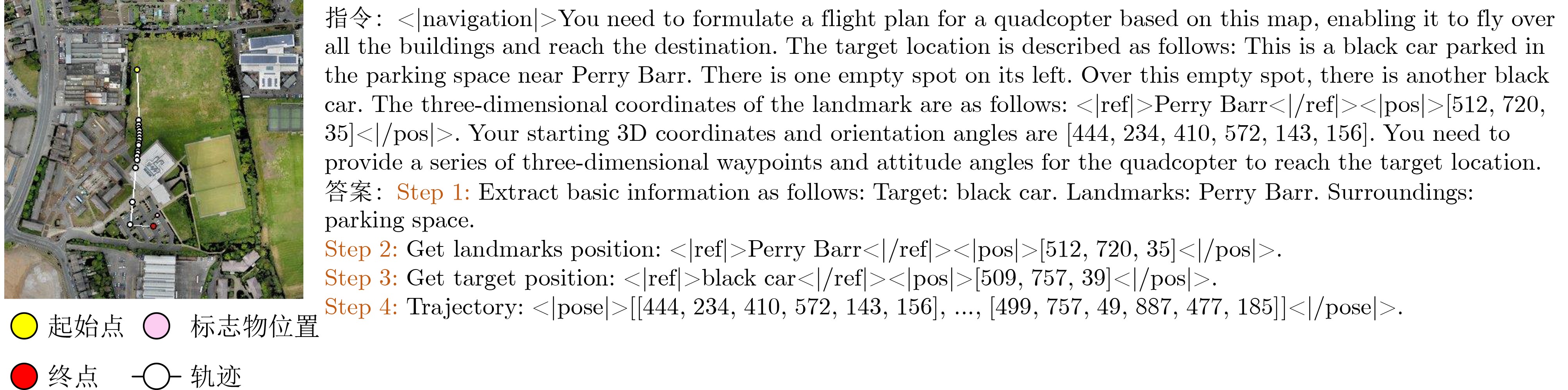
摘要: 随着遥感应用不断从静态图像分析迈向智能化认知决策任务,构建覆盖多任务、多模态的信息融合数据体系已成为推动遥感基础模型发展的关键前提。该文围绕遥感智能体中的感知、认知需求,提出并构建了一个面向多任务图文指令的遥感多模态数据集,系统组织图像、文本指令、空间坐标与行为轨迹等多模态信息,统一支撑多阶段任务链路的训练与评估。该数据集涵盖9类核心任务,包括关系推理、指令分解、任务调度、定位描述与多模态感知等,共计21个子数据集,覆盖光学、SAR与红外3类遥感模态,总体数据规模超过2 000 000样本。在数据构建过程中,该文针对遥感图像的特性设计了标准化的指令格式,提出统一的输入输出范式,确保不同任务间的互通性与可迁移性。同时,设计自动化数据生成与转换流程,以提升多模态样本生成效率与一致性。此外,该文还介绍了在遥感基础模型上的基线性能评估结果,验证了该数据集在多任务泛化学习中的实用价值。该数据集可广泛服务于遥感领域多模态基础模型的构建与评估,尤其适用于统一感知-认知-决策闭环流程的智能体模型开发,具有良好的研究推广价值与工程应用前景。Abstract:
Objective The rapid advancement of Remote Sensing (RS) technology has reshaped Earth observation research, shifting the field from static image analysis to intelligent, goal-oriented cognitive decision-making. Modern RS systems are expected to perceive complex scenes, reason over heterogeneous information, decompose high-level objectives into executable subtasks, and make decisions under uncertainty. These requirements motivate the development of RS agents, which extend perception models to include reasoning, planning, and interaction functions. However, existing RS datasets remain task-centric and fragmented, as they are usually designed for single-purpose supervised learning such as object detection or land-cover classification. They seldom support multimodal reasoning, instruction following, or multi-step decision-making, all of which are essential for agentic workflows. Current RS vision-language datasets also have limited scale, constrained modality coverage, and simplified text annotations, with insufficient use of non-optical data such as Synthetic Aperture Radar (SAR) and infrared imagery. They further lack instruction-driven interactions that reflect real human-agent collaboration. This study constructs a large-scale multimodal image-text instruction dataset tailored for RS agents. The objective is to establish a unified data foundation that supports perception, reasoning, planning, and decision-making. By training models on structured instructions across diverse modalities and task categories, the dataset supports the development and evaluation of next-generation RS foundation models with agentic capability. Methods The dataset is built through a systematic and extensible framework that integrates multi-source RS imagery with instruction-oriented textual supervision. A unified input-output paradigm is defined to ensure compatibility across heterogeneous tasks and model architectures. This paradigm formalizes interactions between visual inputs and language instructions, allowing models to process image pixels, text descriptions, spatial coordinates, region references, and action-oriented outputs. A standardized instruction schema encodes task objectives, constraints, and expected responses in a consistent format. The construction process includes three stages. (1) Data collection and integration: multimodal RS imagery is aggregated from authoritative sources, covering optical, SAR, and infrared modalities with different spatial resolutions, scene types, and geographic distributions. (2) Instruction generation: a hybrid strategy combines rule-based templates with refinement by Large Language Models (LLMs). Template-based generation ensures task completeness and structural consistency, whereas LLM rewriting improves linguistic diversity and instruction complexity. (3) Task categorization and organization: the dataset is organized into nine core task categories and 21 sub-datasets that span low-level perception, mid-level reasoning, and high-level decision-making. A validation pipeline performs automated syntax and format checks, cross-modal consistency verification, and manual review of representative samples to ensure semantic alignment between images and instructions. Results and Discussions The dataset contains more than 2 million multimodal instruction samples, making it one of the largest and most comprehensive instruction resources in the RS domain. The inclusion of optical, SAR, and infrared imagery supports cross-modal learning and reasoning across heterogeneous sensing mechanisms. Compared with existing RS datasets, this dataset emphasizes instruction diversity, task compositionality, and agent-oriented interaction rather than isolated perception tasks. Baseline experiments conducted using state-of-the-art multimodal LLMs and RS foundation models show that the dataset supports evaluation across the full spectrum of agentic capabilities, from visual grounding and reasoning to high-level decision-making. The experiments also highlight challenges inherent to RS data, including extreme scale variation, dense object distributions, and long-range spatial dependencies. These challenges indicate important research directions for improving multimodal reasoning and planning in complex RS environments. Conclusions This work presents a large-scale multimodal image-text instruction dataset designed for RS agents. By organizing data across nine task categories and 21 sub-datasets, it provides a unified and extensible benchmark for agent-centric RS research. The contributions include: (1) a unified multimodal instruction paradigm for RS agents; (2) a 2-million-sample dataset covering optical, SAR, and infrared modalities; (3) empirical validation demonstrating support for end-to-end agentic workflows from perception to decision-making; and (4) a comprehensive evaluation benchmark based on baseline experiments. Future work will extend the dataset to temporal and video-based RS scenarios, integrate dynamic decision-making processes, and further improve reasoning and planning capability in real-world, time-varying environments. -
表 1 数据集整体统计
任务类型 数据模态 数据集名称 数量规模 任务调度 光学 Citynav[19] 32637 指令分解 光学 ReCon1M-DEC 27821 关系推理 光学 ReCon1M-REL 125000 关系检测 光学 ReCon1M-DET 120097 定位描述 光学 DIOR-GC 22921 光学 DOTA-GC 48866 多模态感知
(目标检测)光学 DIOR[20] 23463 SAR SARDet-100K[21] 116598 红外 IR-DET 56353 多模态感知
(图像描述)光学 DIOR-CAP 92875 光学 DOTA-CAP 307150 SAR SAR-CAP 582990 红外 IR-CAP 281765 多模态感知
(图像分类)光学 AID[22] 10000 光学 NWPU-RESISC45[23] 31500 SAR SAR-CLA 116597 红外 IR-CLA 56353 多模态感知
(目标计数)光学 DIOR-COUNT 35204 光学 DOTA-COUNT 78432 SAR IR-COUNT 107565 红外 SAR-COUNT 117803 总数 - - 2391990  下载: 导出CSV
下载: 导出CSV
表 2 关系推理数据集中各类别关系的样本分布统计表
类别名 训练集 测试集 类别名 训练集 测试集 类别名 训练集 测试集 类别名 训练集 测试集 above 69 5 dig 1 0 link-to 166 21 pull 5 1 adjacent-to 2799 289 dock-alone-at 4 1 load 9 0 sail-by 20 4 adjoint-with 3 1 dock-at 102 13 manage 35 4 sail-on 922 123 around 3 0 drive-at-the-
different-lane148 20 moor-at 3414 383 separate 31 1 belong-to 913 112 drive-at-the-same-lane 144 17 move-away-from 8 0 serve 1737 174 block 2 1 drive-on 4931 538 park-alone-at 14 3 slow-down 241 34 border 72 9 emit 1 0 park-next-to 30544 3389 supplement 334 50 close-to 24992 2657 enter 6 0 parked-at 15432 1735 supply 179 26 command 3 0 equipped-with 66 8 pass-under 3 0 support 79 7 connect 186 15 exit-from 5 1 pile-up-at 660 83 support-the-
construction-of82 9 contain 106 14 hoist 93 10 placed-on 29 2 taxi-on 226 22 converge 14 1 inside 7558 854 power 139 9 tow 10 3 cooperate-with 430 47 is-parallel-to 3516 402 prepared-for 81 14 transport 48 6 cross 1224 130 is-symmetric-with 4 1 provide-access-to 10584 1247 ventilate 44 2 cultivate 10 0 lie-under 13 1 provide-shuttle-
service-to6 1
下载: 导出CSV
表 3 关系检测数据集中各类别关系的样本分布统计表
类别名 训练集 测试集 类别名 训练集 测试集 类别名 训练集 测试集 类别名 训练集 测试集 above 73 7 dock-alone-at 5 0 manage 29 5 sail-by 22 3 adjacent-to 2575 297 dock-at 80 7 moor-at 3224 344 sail-on 636 78 adjoint-with 4 0 drive-at-the-
different-lane112 15 move-away-from 5 0 separate 39 4 around 4 2 drive-at-the-
same-lane154 18 park-alone-at 10 0 serve 1655 186 belong-to 768 66 drive-on 4819 545 park-next-to 29857 3249 slow-down 245 34 block 1 0 enter 8 0 parked-at 15308 1729 supplement 321 37 border 52 7 equipped-with 59 9 pass-under 3 0 supply 207 16 close-to 23942 2713 exit-from 5 0 pile-up-at 590 76 support 61 6 command 2 0 hoist 115 7 placed-on 25 0 support-the-
construction-of11 1 connect 169 16 inside 7556 860 power 99 9 taxi-on 155 13 contain 111 7 is-parallel-to 3088 345 prepared-for 64 11 tow 7 0 converge 9 2 is-symmetric-with 2 0 provide-access-to 9989 1136 transport 28 2 cooperate-with 384 39 lie-under 14 4 provide-shuttle-service-to 5 0 ventilate 30 2 cross 1151 118 link-to 168 14 pull 2 1
下载: 导出CSV
表 4 指令分解数据集中各类别关系的样本分布统计表
类别名 训练集 测试集 类别名 训练集 测试集 类别名 训练集 测试集 类别名 训练集 测试集 above 195 48 dig 32 7 link-to 78 24 pull 1 0 adjacent-to 7960 2014 dock-alone-at 22 5 load 70 21 sail-by 95 11 adjoint-with 20 4 dock-at 172 34 manage 108 20 sail-on 4750 890 around 10 5 drive-at-the-
different-lane210 48 moor-at 10740 2751 separate 14 4 belong-to 3957 1108 drive-at-the-same-lane 42 18 move-away-from 35 3 serve 2623 681 block 11 0 drive-on 9148 2119 park-alone-at 41 8 slow-down 417 103 border 319 97 emit 12 4 park-next-to 71926 17232 supplement 475 124 close-to 40840 9980 enter 30 4 parked-at 35623 8641 supply 403 115 command 34 9 equipped-with 89 21 pass-under 28 8 support 94 38 connect 618 170 exit-from 6 0 pile-up-at 2070 514 support-the-
construction-of61 9 contain 441 25 hoist 266 66 placed-on 139 20 taxi-on 1175 320 converge 17 5 inside 12566 3607 power 212 47 tow 48 10 cooperate-with 998 230 is-parallel-to 9428 2578 prepared-for 139 31 transport 195 42 cross 1534 364 is-symmetric-with 4 4 provide-access-to 12362 3009 ventilate 83 25 cultivate 97 28 lie-under 42 9 provide-shuttle-
service-to44 34
下载: 导出CSV
表 5 定位描述数据集信息统计表
训练集 句子数量 单词数量 平均句子长度 DIOR-GC训练集 11381 151804 13.34 DIOR-GC测试集 11540 164248 14.23 DOTA-GC训练集 37617 932049 24.78 DOTA-GC测试集 11249 239331 21.28 总数 71787 1487432 18.41
下载: 导出CSV
表 6 多模态感知中图像描述数据集统计
数据类型 训练集/测试集 句子数量 单词数量 平均句子长度 SAR SAR-CAP训练集 524925 4950300 9.43 SAR-CAP测试集 58065 550216 9.48 总数 582990 5500516 9.46 红外 IR-CAP训练集 132410 1330173 10.05 IR-CAP测试集 14735 148973 10.11 总数 147145 1479146 10.08 可见光 DIOR-CAP训练集 11725 157232 13.41 DIOR-CAP测试集 57700 738907 12.81 DOTA-CAP训练集 83635 1486176 17.77 DOTA-CAP测试集 56245 1090289 19.38 总数 209305 3472604 15.84
下载: 导出CSV
表 7 多模态感知中图像分类数据集统计
数据类型 类别名称 训练集 测试集 训练/测试比例 SAR Aircraft 3037 16835 0.1804 Aircraft and tank 3 4 0.7500 Bridge 1697 16168 0.1050 Bridge and harbor 16 131 0.1221 Bridge and ship 13 230 0.0565 Bridge and tank 33 329 0.1003 Bridge, harbor and tank 3 25 0.1200 Car 103 941 0.1095 Harbor 138 1255 0.1100 Harbor and tank 9 82 0.1098 Ship 6470 67211 0.0963 Ship and tank 13 287 0.0453 Tank 77 1487 0.0518 总数 11612 104985 0.1505 红外 Ship 1593 14354 0.1110 Street 4036 36370 0.1110 总数 5629 50724 0.1110
下载: 导出CSV
表 12 多模态感知任务在SAR-CAP和IR-CAP数据集上的结果(%)
模型类型 模型方法 SAR-CAP IR-CAP BLEU-1↑ BLEU-2↑ BLEU-3↑ BLEU-4↑ METEOR↑ ROUGE-L↑ BLEU-1↑ BLEU-2↑ BLEU-3↑ BLEU-4↑ METEOR↑ ROUGE-L↑ 通用视觉
语言模型
(零样本评估)MiniGPT-v2[7] 7.00 3.64 1.59 0.60 7.67 9.25 5.65 3.35 1.92 0.98 7.62 8.67 DeepSeek-VL2[36] 12.52 5.88 1.88 0.60 10.65 14.10 13.95 7.57 3.47 1.43 12.48 15.12 遥感视觉
语言模型
(微调后评估)RingMo-Agent[34] 55.93 44.49 33.57 23.94 25.06 51.12 56.84 40.45 29.17 21.50 26.15 43.13
下载: 导出CSV
-
[1] SUN Xian, WANG Peijin, LU Wanxuan, et al. RingMo: A remote sensing foundation model with masked image modeling[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5612822. doi: 10.1109/TGRS.2022.3194732. [2] HU Huiyang, WANG Peijin, BI Hanbo, et al. RS-vHeat: Heat conduction guided efficient remote sensing foundation model[C]. The IEEE/CVF International Conference on Computer Vision, Honolulu, The United States of America, 2025: 9876–9887. [3] CHANG Hao, WANG Peijin, DIAO Wenhui, et al. Remote sensing change detection with bitemporal and differential feature interactive perception[J]. IEEE Transactions on Image Processing, 2024, 33: 4543–4555. doi: 10.1109/TIP.2024.3424335. [4] SHI Qian, HE Da, LIU Zhengyu, et al. Globe230k: A benchmark dense-pixel annotation dataset for global land cover mapping[J]. Journal of Remote Sensing, 2023, 3: 0078. doi: 10.34133/remotesensing.0078. [5] HU Fengming, XU Feng, WANG R, et al. Conceptual study and performance analysis of tandem multi-antenna spaceborne SAR interferometry[J]. Journal of Remote Sensing, 2024, 4: 0137. doi: 10.34133/remotesensing.0137. [6] MEI Shaohui, LIAN Jiawei, WANG Xiaofei, et al. A comprehensive study on the robustness of deep learning-based image classification and object detection in remote sensing: Surveying and benchmarking[J]. Journal of Remote Sensing, 2024, 4: 0219. doi: 10.34133/remotesensing.0219. [7] CHEN Jun, ZHU Deyao, SHEN Xiaoqian, et al. MiniGPT-v2: Large language model as a unified interface for vision-language multi-task learning[J]. arXiv: 2310.09478, 2023. doi: 10.48550/arXiv.2310.09478. [8] PENG Zhiliang, WANG Wenhui, DONG Li, et al. Kosmos-2: Grounding multimodal large language models to the world[J]. arXiv: 2306.14824, 2023. doi: 10.48550/arXiv.2306.14824. [9] CHEN Keqin, ZHANG Zhao, ZENG Weili, et al. Shikra: Unleashing multimodal LLM's referential dialogue magic[J]. arXiv: 2306.15195, 2023. doi: 10.48550/arXiv.2306.15195. [10] LIU Chenyang, ZHAO Rui, CHEN Hao, et al. Remote sensing image change captioning with dual-branch transformers: A new method and a large scale dataset[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5633520. doi: 10.1109/TGRS.2022.3218921. [11] LOBRY S, MARCOS D, MURRAY J, et al. RSVQA: Visual question answering for remote sensing data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(12): 8555–8566. doi: 10.1109/TGRS.2020.2988782. [12] CHENG Qimin, HUANG Haiyan, XU Yuan, et al. NWPU-captions dataset and MLCA-net for remote sensing image captioning[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5629419. doi: 10.1109/TGRS.2022.3201474. [13] LU Xiaoqiang, WANG Binqiang, ZHENG Xiangtao, et al. Exploring models and data for remote sensing image caption generation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(4): 2183–2195. doi: 10.1109/TGRS.2017.2776321. [14] QU Bo, LI Xuelong, TAO Dacheng, et al. Deep semantic understanding of high resolution remote sensing image[C]. 2016 International Conference on Computer, Information and Telecommunication Systems (CITS), Kunming, China, 2016: 1–5. doi: 10.1109/CITS.2016.7546397. [15] LI Kun, VOSSELMAN G, and YANG M Y. HRVQA: A visual question answering benchmark for high-resolution aerial images[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2024, 214: 65–81. doi: 10.1016/j.isprsjprs.2024.06.002. [16] HU Yuan, YUAN Jianlong, WEN Congcong, et al. RSGPT: A remote sensing vision language model and benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2025, 224: 272–286. doi: 10.1016/j.isprsjprs.2025.03.028. [17] LUO Junwei, PANG Zhen, ZHANG Yongjun, et al. SkySenseGPT: A fine-grained instruction tuning dataset and model for remote sensing vision-language understanding[J]. arXiv: 2406.10100, 2024. doi: 10.48550/arXiv.2406.10100. [18] LI Xiang, DING Jian, and MOHAMED E. VRSBench: A versatile vision-language benchmark dataset for remote sensing image understanding[C]. The 38th International Conference on Neural Information Processing Systems, Vancouver, Canada, 2024: 106. [19] LEE J, MIYANISHI T, KURITA S, et al. CityNav: A large-scale dataset for real-world aerial navigation[C]. The IEEE/CVF International Conference on Computer Vision, Honolulu, The United States of America, 2025: 5912–5922. [20] LI Ke, WAN Gang, CHENG Gong, et al. Object detection in optical remote sensing images: A survey and a new benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 159: 296–307. doi: 10.1016/j.isprsjprs.2019.11.023. [21] LI Yuxuan, LI Xiang, LI Weijie, et al. SARDet-100K: Towards open-source benchmark and toolkit for large-scale SAR object detection[C]. The 38th International Conference on Neural Information Processing Systems, Vancouver, Canada, 2024: 4079. [22] XIA Guisong, HU Jingwen, HU Fan, et al. AID: A benchmark data set for performance evaluation of aerial scene classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(7): 3965–3981. doi: 10.1109/TGRS.2017.2685945. [23] CHENG Gong, HAN Junwei, and LU Xiaoqiang. Remote sensing image scene classification: Benchmark and state of the art[J]. Proceedings of the IEEE, 2017, 105(10): 1865–1883. doi: 10.1109/JPROC.2017.2675998. [24] YAN Qiwei, DENG Chubo, LIU Chenglong, et al. ReCon1M: A large-scale benchmark dataset for relation comprehension in remote sensing imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: 4507022. doi: 10.1109/TGRS.2025.3589986. [25] XIA Guisong, BAI Xiang, DING Jian, et al. DOTA: A large-scale dataset for object detection in aerial images[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 3974–3983. doi: 10.1109/cvpr.2018.00418. [26] LIU Haotian, LI Chunyuan, LI Yuheng, et al. Improved baselines with visual instruction tuning[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2024: 26286–26296. doi: 10.1109/CVPR52733.2024.02484. [27] SUO Jiashun, WANG Tianyi, ZHANG Xingzhou, et al. HIT-UAV: A high-altitude infrared thermal dataset for Unmanned Aerial Vehicle-based object detection[J]. Scientific Data, 2023, 10(1): 227. doi: 10.1038/s41597-023-02066-6. [28] 李春柳, 王水根. 红外海上船舶数据集[EB/OL]. https://openai.raytrontek.com/apply/Sea_shipping.html, 2021. LI Chunliu and WANG Shuigen. Infrared sea-shipping dataset[EB/OL]. https://openai.raytrontek.com/apply/Sea_shipping.html, 2021. [29] 刘晴, 徐召飞, 金荣璐, 等. 红外安防数据库[EB/OL]. https://openai.raytrontek.com/apply/Infrared_security.html, 2021. LIU Qing, XU Zhaofei, JIN Ronglu, et al. Infrared-security dataset[EB/OL]. https://openai.raytrontek.com/apply/Infrared_security.html, 2021. [30] 刘晴, 徐召飞, 王水根. 红外航拍人车检测数据集[EB/OL]. http://openai.raytrontek.com/apply/Aerial_mancar.html, 2021. LIU Qing, XU Zhaofei, and WANG Shuigen. Infrared aerial-mancar dataset[EB/OL]. http://openai.raytrontek.com/apply/Aerial_mancar.html, 2021. [31] 李钢强, 王建生, 王水根. 双光车载场景数据库[EB/OL]. http://openai.raytrontek.com/apply/Double_light_vehicle.html, 2021.LI Gangqiang, WANG Jiansheng, and WANG Shuigen. Double-light-vehicle dataset[EB/OL]. http://openai.raytrontek.com/apply/Double_light_vehicle.html, 2021. [32] 山东大学光学高等研究中心. 远海(10–12km)船舶的目标检测数据集[EB/OL]. http://www.core.sdu.edu.cn/info/1133/2174.htm, 2020.Center for Optics Research and Engineering of Shandong University. Open-sea (10–12 km) ship object detection dataset[EB/OL]. http://www.core.sdu.edu.cn/info/1133/2174.htm, 2020. [33] GRATTAFIORI A, DUBEY A, JAUHRI A, et al. The llama 3 herd of models[J]. arXiv: 2407.21783, 2024. doi: 10.48550/arXiv.2407.21783. [34] HU Huiyang, WANG Peijin, FENG Yingchao, et al. RingMo-Agent: A unified remote sensing foundation model for multi-platform and multi-modal reasoning[J]. arXiv: 2507.20776, 2025. doi: 10.48550/arXiv.2507.20776. [35] WANG Peijin, HU Huiyang, TONG Boyuan, et al. RingMoGPT: A unified remote sensing foundation model for vision, language, and grounded tasks[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: 5611320. doi: 10.1109/TGRS.2024.3510833. [36] WU Zhiyu, CHEN Xiaokang, PAN Zizheng, et al. Deepseek-vl2: Mixture-of-experts vision-language models for advanced multimodal understanding[J]. arXiv: 2412.10302, 2024. doi: 10.48550/arXiv.2412.10302. [37] ANDERSON P, WU Q, TENEY D, et al. Vision-and-language navigation: Interpreting visually-grounded navigation instructions in real environments[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 3674–3683. doi: 10.1109/CVPR.2018.00387. [38] LIU Shuobo, ZHANG Hongsheng, QI Yuankai, et al. AeriaLVLN: Vision-and-language navigation for UAVs[C]. The IEEE/CVF International Conference on Computer Vision, Paris, France, 2023: 15338–15348. doi: 10.1109/ICCV51070.2023.01411. -

 下载:
下载:





图(6) / 表(15)
计量
- 文章访问数: 1472
- HTML全文浏览量: 536
- PDF下载量: 238
- 被引次数: 0
