

A Reliable Service Chain Option for Global Migration of Intelligent Twins in Vehicular Metaverses
-
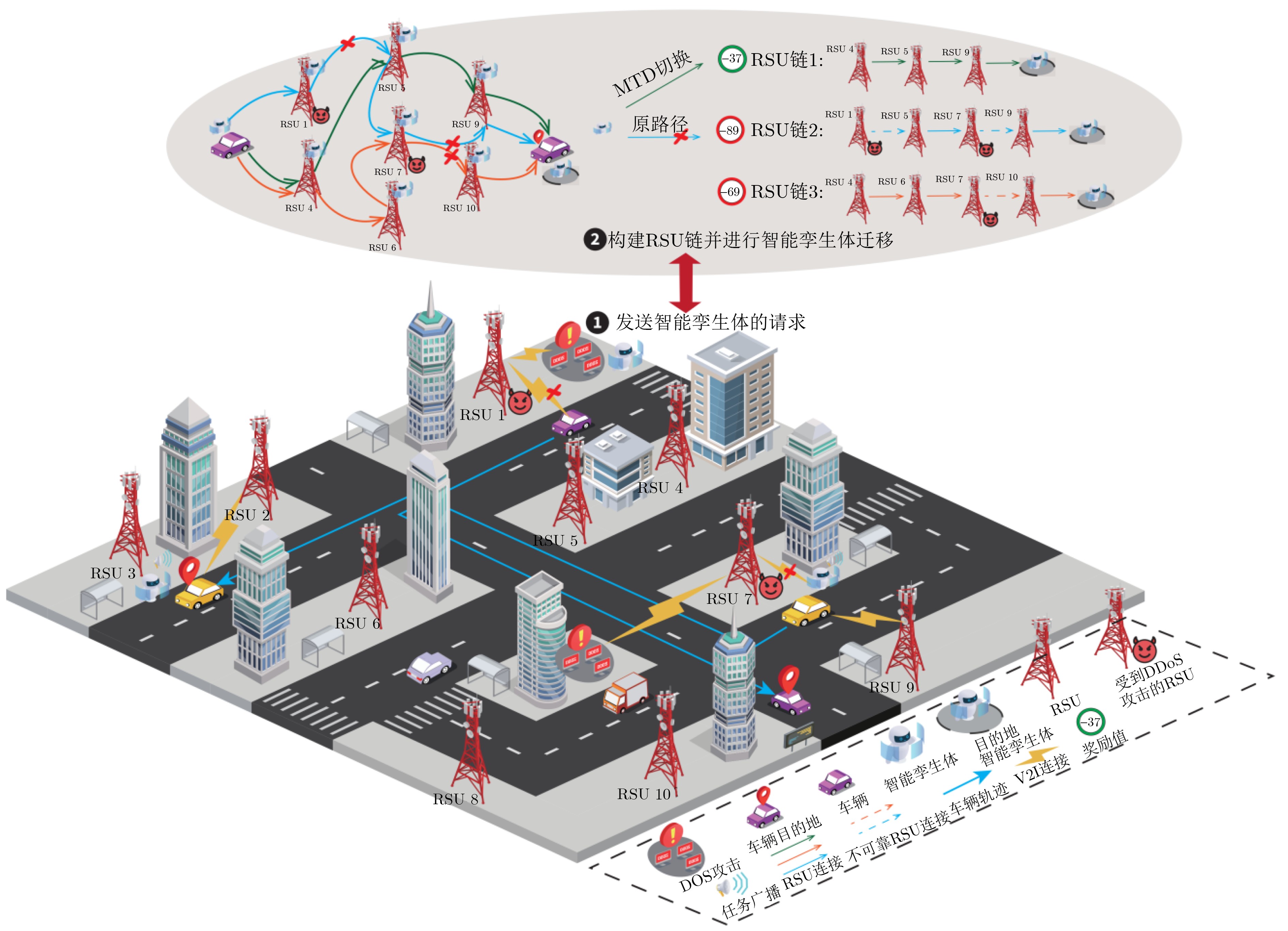
摘要: 车载元宇宙作为元宇宙与智能交通系统融合演进的新兴范式,正逐步成为汽车产业变革的重要推力。在这一背景下,智能孪生体作为覆盖车辆全生命周期并管理车载应用的数字化副本,为用户提供沉浸式车载元宇宙服务。针对车载元宇宙中孪生体迁移的服务连续性与网络安全性问题,该文提出一种基于路侧单元(RSU)链构建的孪生体全局安全动态迁移方案,以确保在面临多种类型分布式拒绝服务(DDoS)攻击时,孪生体能够高效安全迁移。具体而言,该方案通过通信不中断机制构建可靠RSU链集合,实现孪生体在不同RSU间的无缝迁移。然后,将全局迁移过程建模为部分可观测马尔可夫决策过程,综合考虑RSU负载、计算能力及攻击类型等动态环境因素。最后,利用多智能体深度Q网络算法对安全迁移优化问题进行求解。实验结果表明,在多种DDoS攻击场景下所提方案显著提升了迁移过程的效率与安全性,使孪生体有效避免与受攻击的RSU连接,从而保障全局迁移的高效可靠性。
-
关键词:
- 车载元宇宙 /
- 智能孪生体迁移 /
- 分布式拒绝服务攻击 /
- 多智能体深度强化学习
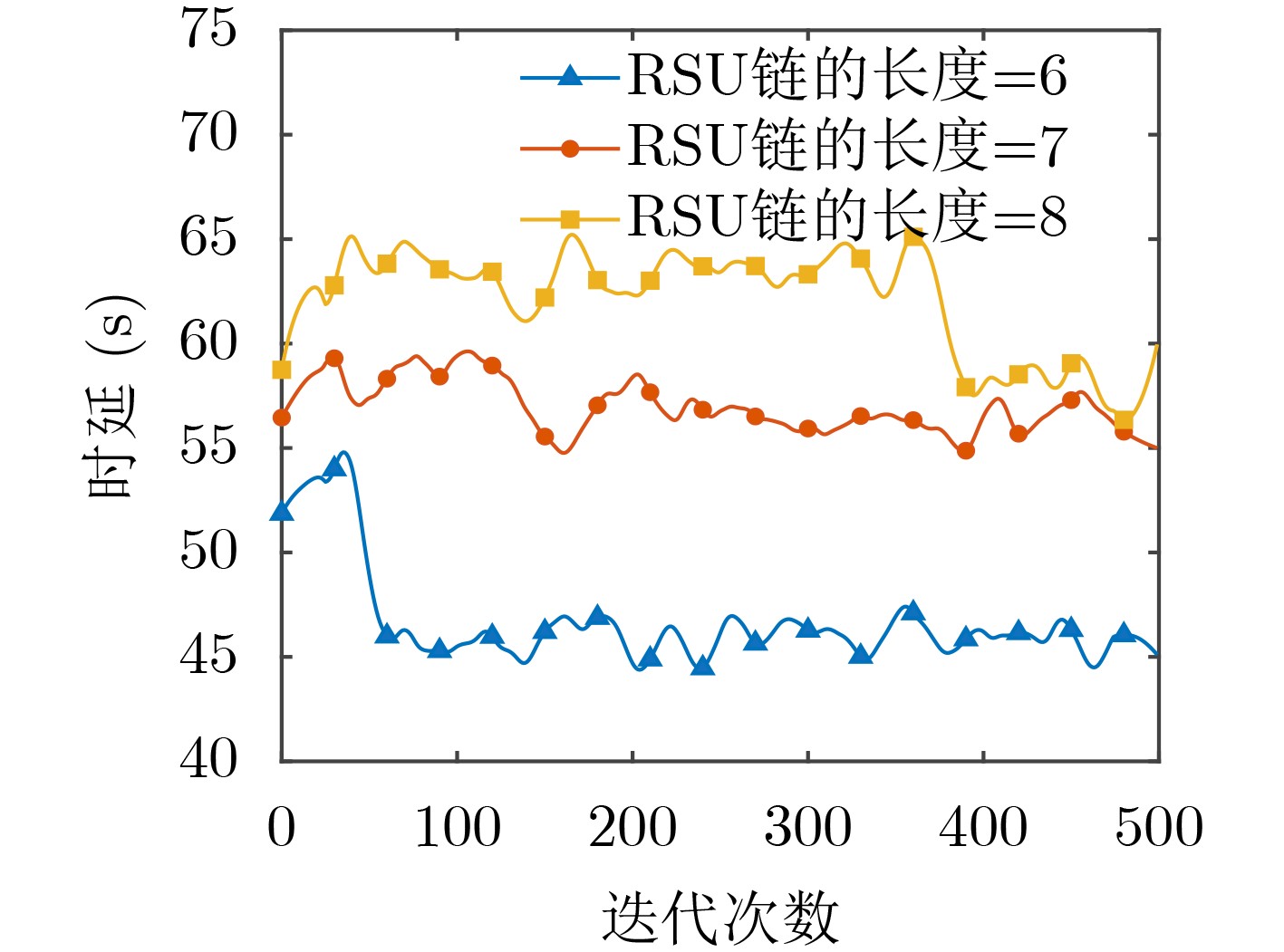
Abstract:Objective As an emerging paradigm that integrates metaverses with intelligent transportation systems, vehicular metaverses are becoming a driving force in the transformation of the automotive industry. Within this context, intelligent twins act as digital counterparts of vehicles, covering their entire lifecycle and managing vehicular applications to provide immersive services. However, seamless migration of intelligent twins across RoadSide Units (RSUs) faces challenges such as excessive transmission delays and data leakage, particularly under cybersecurity threats like Distributed Denial of Service (DDoS) attacks. To address these issues, this paper proposes a globally optimized scheme for secure and dynamic intelligent twin migration based on RSU chains. The proposed approach mitigates transmission latency and enhances network security, ensuring that intelligent twins can be migrated reliably and securely through RSU chains even in the presence of multiple types of DDoS attacks. Methods A set of reliable RSU chains is first constructed using a communication interruption-free mechanism, which enables the rational deployment of intelligent twins for seamless RSU connectivity. This mechanism ensures continuous communication by dynamically reconfiguring RSU chains according to real-time network conditions and vehicle mobility. The secure migration of intelligent twins along these RSU chains is then formulated as a Partially Observable Markov Decision Process (POMDP). The POMDP framework incorporates dynamic network state variables, including RSU load, available bandwidth, computational capacity, and attack type. These variables are continuously monitored to support decision-making. Migration efficiency and security are evaluated based on total migration delay and the number of DDoS attacks encountered; these metrics serve as reward functions for optimization. Deep Reinforcement Learning (DRL) agents iteratively learn from their interactions with the environment, refining RSU chain selection strategies to maximize both security and efficiency. Through this algorithm, the proposed scheme mitigates excessive transmission delays caused by network attacks in vehicular metaverses, ensuring reliable and secure intelligent twin migration even under diverse DDoS attack scenarios. Results and Discussions The proposed secure dynamic intelligent twin migration scheme employs the MADRL framework to select efficient and secure RSU chains within the POMDP. By defining a suitable reward function, the efficiency and security of intelligent twin migration are evaluated under varying RSU chain lengths and different attack scenarios. Simulation results confirm that the scheme enhances migration security in vehicular metaverses. Shorter RSU chains yield lower migration delays than longer ones, owing to reduced handovers and lower communication overhead ( Fig. 2 ). Additionally, the total reward reaches its maximum when the RSU chain length is 6 (Fig. 3 ). The MADQN approach exhibits strong defense capabilities against DDoS attacks. Under direct attacks, MADQN achieves final rewards that are 65.3% and 51.8% higher than those obtained by random and greedy strategies, respectively. Against indirect attacks, MADQN improves performance by 9.3%. Under hybrid attack conditions, MADQN increases the final reward by 29% and 30.9% compared with the random and greedy strategies, respectively (Fig. 4 ), demonstrating the effectiveness of the DRL-based defense strategy in handling complex and dynamic threats. Experimental comparisons with other DRL algorithms, including PPO, A2C, and QR-DQN, further highlight the superiority of MADQN under direct, indirect, and hybrid DDoS attacks (Figs. 5 ~7 ). Overall, the proposed scheme ensures reliable and efficient intelligent twin migration across RSUs even under diverse security threats, thereby supporting high-quality interactions in vehicular metaverses.Conclusions This study addresses the challenge of secure and efficient global migration of intelligent twins in vehicular metaverses by integrating RSU chains with a POMDP-based optimization framework. Using the MADQN algorithm, the proposed scheme improves both the efficiency and security of intelligent twin migration under diverse network conditions and attack scenarios. Simulation results confirm significant gains in performance. Along identical driving routes, shorter RSU chains provide higher migration efficiency and stronger defense capabilities. Under various types of DDoS attacks, MADQN consistently outperforms baseline strategies, achieving higher final rewards than random and greedy approaches across all scenarios. Compared with other DRL algorithms, MADQN increases the final reward by up to 50.1%, demonstrating superior adaptability in complex attack environments. Future work will focus on enhancing the communication security of RSU chains, including the development of authentication mechanisms to ensure that only authorized vehicles can access RSU edge communication networks. -
1 智能孪生体迁移RSU链的形成
输入:初始化 RSU集合$ \mathcal{E} $,时间步集合$ \mathcal{T} $,RSU个数N,车辆与RSU的通信状态L,在同一时刻可以连接到的RSU集合$ \mathcal{A} $,枚举$ \mathcal{A} $[t]各时
间点的所有部署节点的集合$ \mathcal{B} $,可行RSU链集合$ \mathcal{C} $(1) for t = 0 to T do (2) for n = 0 to N do (3) 如果车辆与RSU的连接状态显示可用,即$ {{L}}_{{n}}\left({t}\right)=1 $ (4) 将对应的RSU $ {\mathcal{E}}_{{n}} $添加到集合$ \mathcal{A} $[t] (5) end for (6) end for (7) for t = 0 to T do (8) 在每个时间点上,从$ \mathcal{A} $[t]中枚举所有可能部署节点,并保存于$ \mathcal{B} $ (9) end for (10) 利用笛卡尔积将$ \mathcal{B} $中不同时间点组合,生成完整的RSU部署链集合$ \mathcal{C} $  下载: 导出CSV
下载: 导出CSV
2 RSU链中智能孪生体迁移的MADQN算法
输入:初始化环境env,重放缓冲区$ \mathcal{D} $, 用随机权重$ {\boldsymbol{\theta}} $初始化
Q网络,将目标$ {\rm{Q}}^{\prime} $网络参数初始化为$ {{\boldsymbol{\theta}} }^{\prime}=\theta $,第1个状态$ \mathrm{\mathit{s}}_0 $,迭
代次数T,每次的迭代步数J。(1) for t = 0 to T do (2) 利用$\varepsilon $-greedy策略在动作空间A选择动作$ {{a}}_{{t}} $ (3) 计算链条受攻击总次数$ {N} $和任务平均传输速率$ {{R}}_{\mathrm{a}\mathrm{v}\mathrm{g}} $ (4) 获得状态$ {{s}}_{{t}} $和奖励函数$ {{r}}_{{t}} $ (5) 将$ \left\{{{s}}_{{t}},{{a}}_{{t}},{{r}}_{{t}},{{s}}_{{t}+1}\right\}\mathrm{存}\mathrm{储}\mathrm{到} $ $ \mathcal{D} $中 (6) for j = 0 to J do (7) 随机从$ \mathcal{D} $ 中选择一组经验{$ {{s}}_{{j}},{{a}}_{{j}},{{r}}_{{j}},{{s}}_{{j}+1} $} (8) 根据目标期望式$ \left(21\right) $获得目标Q值 (9) 通过双Q学习中的损失函数式(22),得到$ {L}\left(\boldsymbol{\theta }\right) $ (10) 通过SGD算法更新网络参数$ \boldsymbol{\theta } $ (11) end for (12) end for
下载: 导出CSV
-
[1] XU Minrui, NIYATO D, ZHANG Hongliang, et al. Generative AI-empowered effective physical-virtual synchronization in the vehicular metaverse[C]. 2023 IEEE International Conference on Metaverse Computing, Networking and Applications (MetaCom), Kyoto, Japan, 2023: 607–611. doi: 10.1109/MetaCom57706.2023.00106. [2] ZHANG Hui, LUO Guiyang, LI Yidong, et al. Parallel vision for intelligent transportation systems in metaverse: Challenges, solutions, and potential applications[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(6): 3400–3413. doi: 10.1109/TSMC.2022.3228314. [3] JI Baofeng, ZHANG Xueru, MUMTAZ S, et al. Survey on the internet of vehicles: Network architectures and applications[J]. IEEE Communications Standards Magazine, 2020, 4(1): 34–41. doi: 10.1109/MCOMSTD.001.1900053. [4] ZHOU Pengyuan, ZHU Jinjing, WANG Yiting, et al. Vetaverse: A survey on the intersection of Metaverse, vehicles, and transportation systems[EB/OL]. https://doi.org/10.48550/arXiv.2210.15109, 2022. [5] WEN Jinbo, KANG Jiawen, XIONG Zehui, et al. Task freshness-aware incentive mechanism for vehicle twin migration in vehicular metaverses[C]. 2023 IEEE International Conference on Metaverse Computing, Networking and Applications (MetaCom), Kyoto, Japan, 2023: 481–487. doi: 10.1109/MetaCom57706.2023.00089. [6] ZHONG Yue, WEN Jinbo, ZHANG Junhong, et al. Blockchain-assisted twin migration for vehicular metaverses: A game theory approach[J]. Transactions on Emerging Telecommunications Technologies, 2023, 34(12): e4856. doi: 10.1002/ett.4856. [7] KUMARI P and JAIN A K. A comprehensive study of DDoS attacks over IoT network and their countermeasures[J]. Computers & Security, 2023, 127: 103096. doi: 10.1016/j.cose.2023.103096. [8] ZHANG Tao, XU Changqiao, ZOU Ping, et al. How to mitigate DDoS intelligently in SD-IoV: A moving target defense approach[J]. IEEE Transactions on Industrial Informatics, 2023, 19(1): 1097–1106. doi: 10.1109/TII.2022.3190556. [9] KANG Jiawen, CHEN Junlong, XU Minrui, et al. UAV-assisted dynamic avatar task migration for vehicular metaverse services: A multi-agent deep reinforcement learning approach[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(2): 430–445. doi: 10.1109/JAS.2023.123993. [10] TONG Yongju, KANG Jiawen, CHEN Junlong, et al. Diffusion-based reinforcement learning for dynamic UAV-assisted vehicle twins migration in vehicular metaverses[C]. 2024 IEEE Global Communications Conference, Cape Town, South Africa, 2024: 5156–5161. doi: 10.1109/GLOBECOM52923.2024.10901050. [11] AlKHOORI F A, KHAN L U, GUIZANI M, et al. Latency-aware placement of vehicular metaverses using virtual network functions[J]. Simulation Modelling Practice and Theory, 2024, 133: 102899. doi: 10.1016/j.simpat.2024.102899. [12] AHILAL A, BRAUD T, LEE L H, et al. Toward a traffic metaverse with shared vehicle perception[J]. IEEE Communications Standards Magazine, 2023, 7(3): 40–47. doi: 10.1109/MCOMSTD.0008.2200067. [13] QIU Yu, CHEN Min, HUANG Hebin, et al. Spotlighter: Backup age-guaranteed immersive virtual vehicle service provisioning in edge-enabled vehicular metaverse[J]. IEEE Transactions on Mobile Computing, 2024, 23(12): 13375–13391. doi: 10.1109/TMC.2024.3425896. [14] JEREMIAH S R, YANG L T, and PARK J H. Digital twin-assisted resource allocation framework based on edge collaboration for vehicular edge computing[J]. Future Generation Computer Systems, 2024, 150: 243–254. doi: 10.1016/j.future.2023.09.001. [15] KHAN L U, GUIZANI M, NIYATO D, et al. Metaverse for wireless systems: Architecture, advances, standardization, and open challenges[J]. Internet of Things, 2024, 25: 101121. doi: 10.1016/j.iot.2024.101121. [16] CHEN Junlong, KANG Jiawen, XU Minrui, et al. Multiagent deep reinforcement learning for dynamic avatar migration in AIoT-enabled vehicular metaverses with trajectory prediction[J]. IEEE Internet of Things Journal, 2024, 11(1): 70–83. doi: 10.1109/JIOT.2023.3296075. [17] KANG Yingkai, WEN Jinbo, KANG Jiawen, et al. Hybrid-generative diffusion models for attack-oriented twin migration in vehicular metaverses[J]. IEEE Transactions on Vehicular Technology, 2025, 74(9): 14720–14734. doi: 10.1109/TVT.2025.3566034. [18] NIU Xin and LU Jiazhang. Moving target defense controller of mobile system based on Openflow sensor security scheme[J]. Computer Communications, 2020, 161: 142–149. doi: 10.1016/j.comcom.2020.05.004. [19] GAO Chungang and WANG Yongjie. Reinforcement learning based self-adaptive moving target defense against DDoS attacks[J]. Journal of Physics: Conference Series, 2021, 1812: 012039. doi: 10.1088/1742-6596/1812/1/012039. [20] HYDER M F and FATIMA T. Towards crossfire distributed denial of service attack protection using intent-based moving target defense over software-defined networking[J]. IEEE Access, 2021, 9: 112792–112804. doi: 10.1109/ACCESS.2021.3103845. [21] SHAAR F and EFE A. DDoS attacks and impacts on various cloud computing components[J]. International Journal of Information Security Science, 2018, 7(1): 26–48. [22] SHANNON C E. A mathematical theory of communication[J]. The Bell System Technical Journal, 1948, 27(3): 379–423. doi: 10.1002/j.1538-7305.1948.tb01338.x. [23] REN Pei, QIAO Xiuquan, HUANG Yakun, et al. Edge AR X5: An edge-assisted multi-user collaborative framework for mobile web augmented reality in 5G and beyond[J]. IEEE Transactions on Cloud Computing, 2022, 10(4): 2521–2537. doi: 10.1109/TCC.2020.3046128. [24] SKLAR B. Rayleigh fading channels in mobile digital communication systems. I. Characterization[J]. IEEE Communications Magazine, 1997, 35(9): 136–146. doi: 10.1109/35.620535. [25] WANG Xu, WANG Sen, LIANG Xingxing, et al. Deep reinforcement learning: A survey[J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(4): 5064–5078. doi: 10.1109/TNNLS.2022.3207346. [26] ZAKHARENKOV A and MAKAROV I. Deep reinforcement learning with DQN vs. PPO in VizDoom[C]. 2021 IEEE 21st International Symposium on Computational Intelligence and Informatics, Budapest, Hungary, 2021: 131–136. doi: 10.1109/CINTI53070.2021.9668479. [27] DE LA FUENTE N and GUERRA D A V. A comparative study of deep reinforcement learning models: DQN vs PPO vs A2C[EB/OL]. https://doi.org/10.48550/arXiv.2407.14151, 2024. [28] LADOSZ P, WENG Lilian, KIM M, et al. Exploration in deep reinforcement learning: A survey[J]. Information Fusion, 2022, 85: 1–22. doi: 10.1016/j.inffus.2022.03.003. [29] FAN Jianqing, WANG Zhaoran, XIE Yuchen, et al. A theoretical analysis of deep Q-learning[C]. Proceedings of the 2nd Annual Conference on Learning for Dynamics and Control, Berkeley, USA, 2020: 486–489. -

 下载:
下载:







图(7) / 表(4)
计量
- 文章访问数: 546
- HTML全文浏览量: 273
- PDF下载量: 69
- 被引次数: 0
