

Stealthy Path Planning Algorithm for UAV Swarm Based on Improved APF-RRT* Under Dynamic Threat
-
摘要: 当前无人机集群在复杂战场环境中的高效突防与生存能力着重依赖于精确的航迹规划,然而动态威胁环境下多种探测与拦截手段的存在,使得传统航迹规划难以同时满足隐身性、可行性和安全性要求。为此,该文提出一种动态威胁下基于改进人工势场(Artificial Potential Field, APF)与快速随机扩展树星(Rapidly-exploring Random Trees star, RRT*)算法的无人机集群隐身航迹规划算法。首先,构建包含雷达、高射炮及固定障碍物的多元威胁环境模型,并结合无人机雷达散射截面(Radar Cross Section, RCS),推导包含航程、组网雷达检测概率及高射炮威胁概率的无人机集群隐身航迹规划综合代价函数。其次,以最小化无人机集群隐身航迹规划的综合代价函数为优化目标,结合航迹可行性判定和无人机集群动力学等限制为约束条件,构建动态威胁下无人机集群隐身航迹规划模型。最后,提出了一种改进APF-RRT*算法,并对上述优化模型进行求解。仿真结果表明,所提算法在保证航迹可行性及动力学约束的前提下,相较于现有方法能够有效降低无人机集群的综合代价,提高了无人机集群航迹的隐身性能,实现更优的协同突防效果。Abstract:
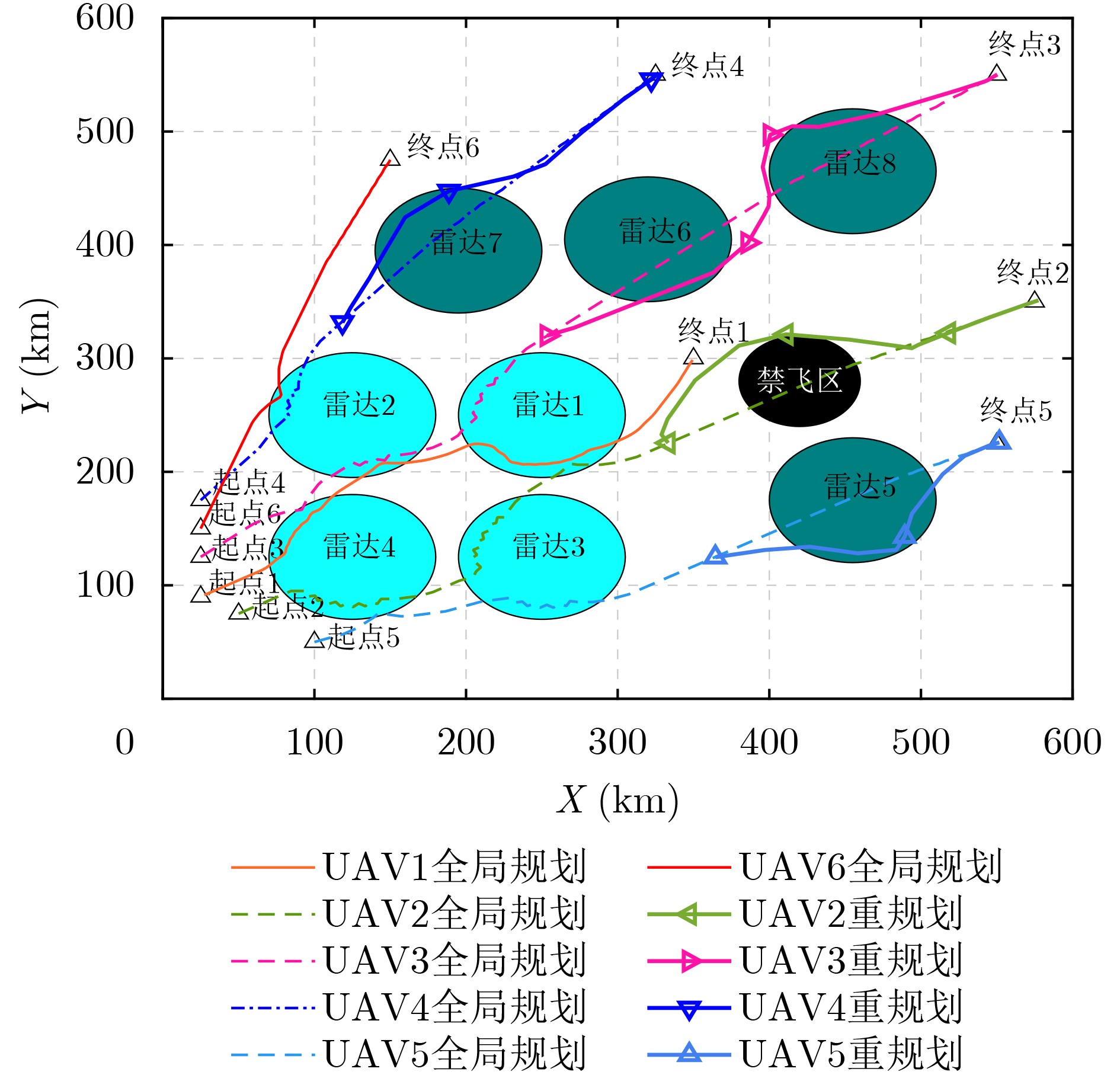
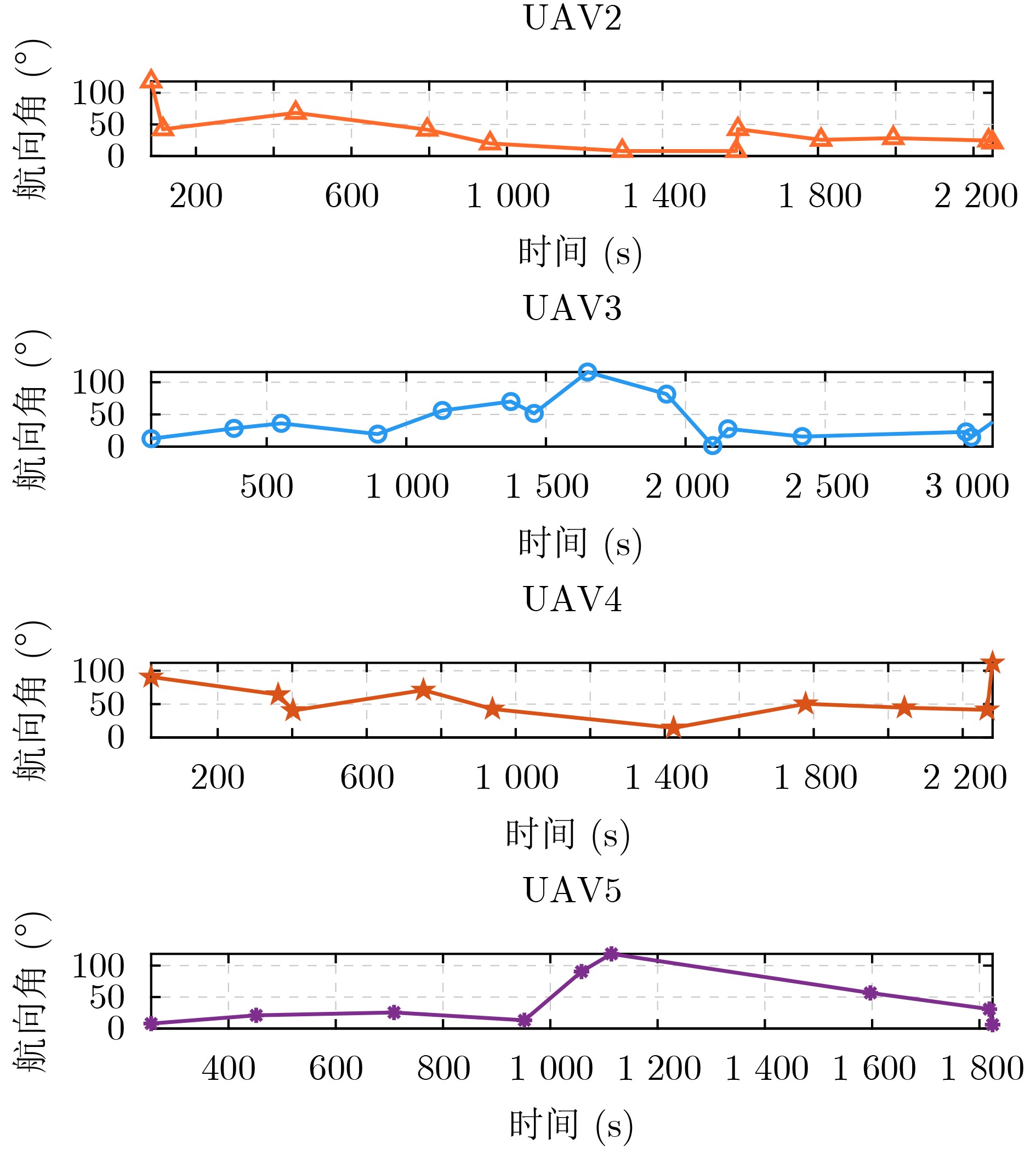
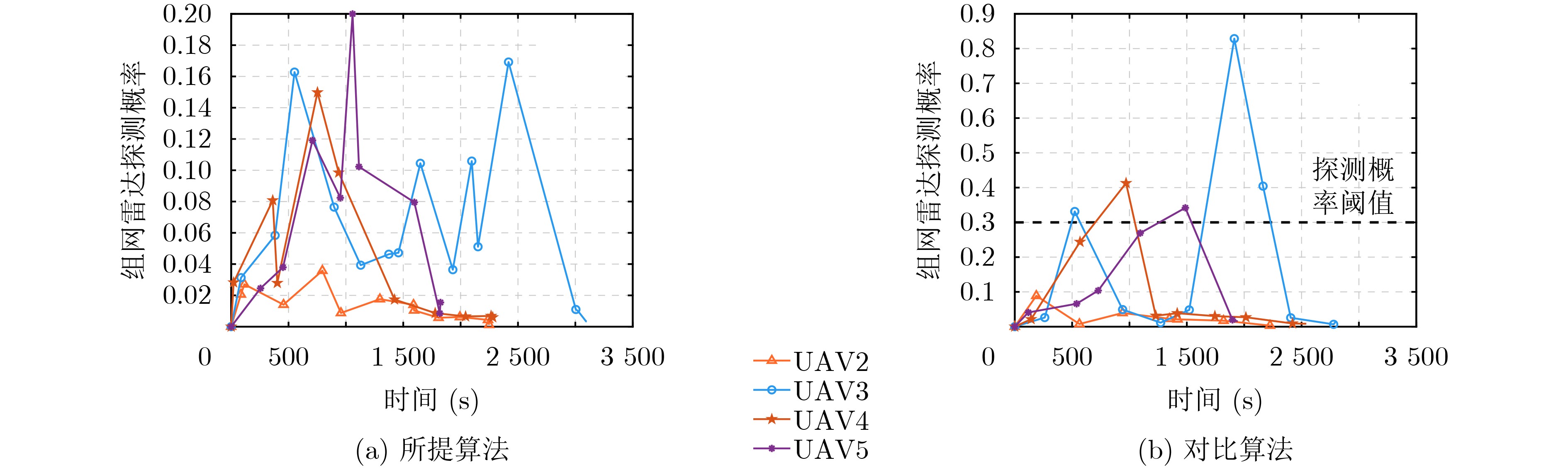
Objective The efficient penetration and survivability of Unmanned Aerial Vehicle (UAV) swarms in complex battlefield environments depend on robust trajectory planning. With the increasing deployment of advanced air defense systems, including radar networks, anti-aircraft artillery, and dynamic no-fly zones, conventional planning methods struggle to meet simultaneous requirements for stealth, feasibility, and safety. Although prior studies provide useful progress in UAV swarm path planning, several limitations remain. (1) Most research concentrates on detection models for single radars and does not account for the relation between UAV Radar Cross Section (RCS) and stealth trajectory optimization. (2) UAV kinematic constraints are often handled separately from stealth characteristics. (3) Environmental threats are commonly modeled as static and singular, which limits real-time adaptation to dynamic threats. (4) Stealth planning is also examined mainly for individual UAVs, with limited consideration of swarm-level coordination. This study addresses these gaps by proposing a cooperative stealth trajectory planning framework that integrates real-time threat perception with swarm dynamics optimization and strengthens survivability in contested airspace. Methods This study proposes a stealth path planning algorithm for UAV swarms based on an improved Artificial Potential Field (APF) and a Rapidly-exploring Random Trees star (RRT*) framework under dynamic threat conditions. A multi-threat environment model is first constructed to represent radars, anti-aircraft artillery, and fixed obstacles. A comprehensive stealth cost function is then developed by integrating UAV RCS characteristics and considering flight distance, radar detection probability, and artillery threat probability. A stealth trajectory optimization model is formulated to minimize the overall cost function under constraints on UAV kinematics, swarm coordination, and path feasibility. To solve this model efficiently, an enhanced APF-RRT* algorithm is designed. A rolling-window strategy is applied to enable continuous local replanning in response to dynamic threats. This approach supports real-time trajectory updates and improves responsiveness to sudden changes in the threat field. A target-biased sampling method is also used to reduce sampling redundancy and increase convergence speed. By combining the global search ability of RRT* with the local adaptability of APF, the method enables UAV swarms to generate stealth-optimal paths in real time while maintaining safety and coordination in adversarial environments. Results and Discussions Simulation experiments confirm the effectiveness of the proposed algorithm. During global path planning, several UAVs enter regions threatened by dynamic no-fly zones, radars, and artillery systems, although others reach their destinations through clear paths. In the local replanning phase, affected UAVs adjust their trajectories to reduce radar detection probability and overall stealth cost. When encountering mobile threats, UAVs execute lateral evasive maneuvers to prevent collisions and ensure mission completion. Under the comparison algorithms, the detection probabilities of the UAVs requiring replanning all exceed the specified threshold for networked radar detection, which shows that these methods do not generate UAV swarm trajectories that satisfy platform safety requirements and therefore fail in practical settings. Comparative simulations show that the proposed method yields lower stealth costs and improves trajectory feasibility and swarm coordination. The algorithm achieves swarm-level stealth optimization and ensures safe and efficient penetration in dynamic environments. Conclusions This study addresses stealth trajectory planning for UAV swarms in dynamic threat environments by proposing an improved APF-RRT* algorithm. The following key findings are obtained from extensive simulations conducted in different contested scenarios (Section 5): (1) The proposed algorithm reduces the voyage distance by 11.1 km in Scene 1 and 66.9 km in Scene 2 compared with the baseline RRT* method ( Tab. 3 ,Tab. 5 ). This reduction is primarily due to RCS-minimizing attitude adjustments produced through heading angle change (Fig. 3 ,Fig. 6 ). (2) The networked radar detection probability remains below the 30 percent threshold for all UAVs (Fig. 4(a) ,Fig. 7(a) ), whereas the comparison algorithms exceed the safety limit for up to 98 percent of the group members (Fig. 4(b) ,Fig. 7(b) ,Fig. 9(a) ,Fig. 9(b) ). (3) The rolling-window replanning mechanism supports real-time avoidance of mobile threats such as dynamic no-fly zones and anti-aircraft artillery (Fig. 5 ,Fig. 8 ), while reducing the comprehensive trajectory cost by 9.0 percent in Scene 1 and 15.6 percent in Scene 2 compared with the baseline RRT method (Tab. 3 ,Tab. 5 ). (4) Cooperative constraints embedded in the planning algorithm maintain safe inter-UAV separation and optimize swarm-level stealth performance (Fig. 2 ,Fig. 5 ,Fig. 8 ). These findings show the superiority of the proposed method in balancing stealth optimization, dynamic threat adaptation, and swarm kinematic feasibility. Future work will extend this framework to three-dimensional complex terrain and integrate deep reinforcement learning to strengthen predictive threat response and battlefield adaptability. -
1 改进APF-RRT*算法
输入:创建初始节点集合$ \boldsymbol{X} $,初始化路径集合$ \boldsymbol{Z} $,构建初始搜索树$ \mathrm{\mathbf{Tree}}_{\text{start}} $。 输出:无人机集群最终路径集合$ \boldsymbol{P} $。 (1)计算势场参数:结合式(12)~式(14)分别计算势场引力
$ \boldsymbol{F}_{\text{gra}} $、势场斥力$ \boldsymbol{F}_{\text{rep}} $以及为$ {\boldsymbol{X}} $受到的合力$ \boldsymbol{F}_{\text{all}} $;(2)目标偏置采样:结合式(9)以概率$ {P_{{\text{th}}}} $生成偏向目标的采
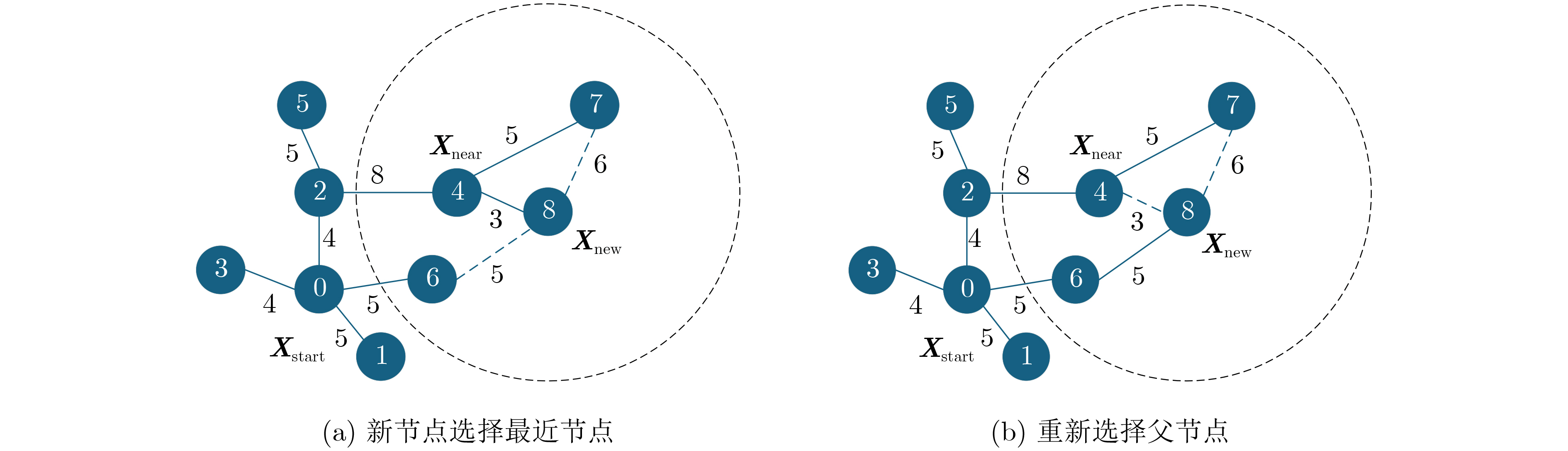
样点$ {{\boldsymbol X}_{{\text{rand}}}} $,否则执行随机采样$ \boldsymbol{X}_{\text{rand}}\leftarrow\mathrm{rand} $;(3)节点扩展:在树中寻找最近邻节点$ {{\boldsymbol X}_{{\text{nearest}}}} $,结合势场引
导方向与步长,由式(11)生成新节点${{\boldsymbol X}_{{\text{new}}}}$;(4)滚动窗口检测:在局部窗口内动态检测新节点${{\boldsymbol X}_{{\text{new}}}}$与最
近邻节点$ {{\boldsymbol X}_{{\text{nearest}}}} $之间的连线是否满足无人机平台安全要求以及
约束条件,若不满足,则返回步骤2。若满足,则在${{\boldsymbol X}_{{\text{new}}}}$的扩展
范围内根据式(10)计算综合代价${F_{{\text{rrt*}}}}$,选择最优父节点;(5)更新数据结构:更新搜索树$ \mathbf{\mathrm{\mathbf{Tree}}}_{\text{start}} $,添加${{\boldsymbol X}_{{\text{new}}}}$并优化
父节点连接;(6)检验终止条件:若${{\boldsymbol X}_{{\text{new}}}}$到当前子目标的距离小于阈值
$\delta $,则路径回溯至起点,更新路径集合$ {\boldsymbol{P}} $,否则返回步骤2;若
当前子目标非最终目标,以${{\boldsymbol X}_{{\text{new}}}}$为新起点,生成下一滚动窗口
子目标,返回步骤1。 下载: 导出CSV
下载: 导出CSV
表 1 无人机的起点终点设置(km)
无人机序号 起点 终点 UAV1 (25, 90) (550, 550) UAV2 (50, 75) (390, 275) UAV3 (25, 125) (475, 385) UAV4 (25, 175) (300, 500) UAV5 (100, 50) (550, 225) UAV6 (25, 200) (200, 550)
下载: 导出CSV
表 2 场景1中威胁位置设置(km)
威胁名称 威胁坐标 威胁名称 威胁坐标 雷达1 (250, 250) 雷达6 (320, 405) 雷达2 (125, 250) 雷达7 (195,395) 雷达3 (250, 125) 雷达8 (455, 465) 雷达4 (125, 125) 禁飞区 (420, 280) 雷达5 (455, 175)
下载: 导出CSV
表 4 场景2中动态威胁位置设置
威胁名称 威胁坐标(km) 雷达5 (455, 165) 雷达6 (320, 435) 雷达7 (225,535) 雷达8 (475, 445) 高射炮 (435, 290) 禁飞区 (170, 370)
下载: 导出CSV
-
[1] EL-MALEK A H A, ABOULHASSAN M A, SALHAB A M, et al. Performance analysis and optimization of UAV-assisted networks: Single UAV with multiple antennas versus multiple UAVs with single antenna[J]. IEEE Systems Journal, 2023, 17(3): 3468–3479. doi: 10.1109/JSYST.2023.3279335. [2] WU Jiehong, SUN Yanan, LI Danyang, et al. An adaptive conversion speed Q-learning algorithm for search and rescue UAV path planning in unknown environments[J]. IEEE Transactions on Vehicular Technology, 2023, 72(12): 15391–15404. doi: 10.1109/TVT.2023.3297837. [3] LIU Huan, LI Xiamiao, FAN Mingfeng, et al. An autonomous path planning method for unmanned aerial vehicle based on a tangent intersection and target guidance strategy[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(4): 3061–3073. doi: 10.1109/TITS.2020.3030444. [4] 於志文, 孙卓, 程岳, 等. 智能无人机集群协同感知计算研究综述[J]. 航空学报, 2024, 45(20): 630912. doi: 10.7527/S1000-6893.2024.30912.YU Zhiwen, SUN Zhuo, CHENG Yue, et al. A review of intelligent UAV swarm collaborative perception and computation[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 630912. doi: 10.7527/S1000-6893.2024.30912. [5] DUAN Haibin, ZHAO Jianxia, DENG Yimin, et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 706–720. doi: 10.1109/TAES.2020.3029624. [6] 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018.DUAN Haibin and QIU Huaxin. Unmanned Aerial Vehicle Swarm Autonomous Control Based on Swarm Intelligence[M]. Beijing: Science Press, 2018. [7] YU Yang and LEE S. Multi-UAV coverage path assignment algorithm considering flight time and energy consumption[J]. IEEE Access, 2024, 12: 26150–26162. doi: 10.1109/ACCESS.2024.3366998. [8] 薛健, 赵琳, 向贤财, 等. 非完全信息下无人机集群对抗研究综述[J]. 电子与信息学报, 2024, 46(4): 1157–1172. doi: 10.11999/JEIT230544.XUE Jian, ZHAO Lin, XIANG Xiancai, et al. A review of the research on UAV swarm confrontation under incomplete information[J]. Journal of Electronics & Information Technology, 2024, 46(4): 1157–1172. doi: 10.11999/JEIT230544. [9] 陈皓婷. 基于HTN的无人机侦察任务规划算法研究[D]. [硕士论文], 电子科技大学, 2023. doi: 10.27005/d.cnki.gdzku.2023.004024.CHEN Haoting. Research on UAV reconnaissance mission planning algorithm based on HTN[D]. [Master dissertation], University of Electronic Science and Technology of China, 2023. doi: 10.27005/d.cnki.gdzku.2023.004024. [10] 王伟伦, 尤明, 孙磊, 等. 未知环境下无人机集群智能协同探索路径规划[J]. 工程科学学报, 2024, 46(7): 1197–1206. doi: 10.13374/j.issn2095-9389.2023.10.15.002.WANG Weilun, YOU Ming, SUN Lei, et al. Intelligent cooperative exploration path planning for UAV swarm in an unknown environment[J]. Chinese Journal of Engineering, 2024, 46(7): 1197–1206. doi: 10.13374/j.issn2095-9389.2023.10.15.002. [11] WAN Yuting, ZHONG Yanfei, MA Ailong, et al. An accurate UAV 3-D path planning method for disaster emergency response based on an improved multiobjective swarm intelligence algorithm[J]. IEEE Transactions on Cybernetics, 2023, 53(4): 2658–2671. doi: 10.1109/TCYB.2022.3170580. [12] 杨毅, 冯彦辉, 梁月乾. 基于Dubins-RRT算法的无人机集群密集障碍物区域覆盖航路规划[J]. 战术导弹技术, 2024(5): 83–98. doi: 10.16358/j.issn.1009-1300.20240043.YANG Yi, FENG Yanhui, and LIANG Yueqian. Dense-obstacle area coverage path planning for UAV swarms based on Dubins-RRT algorithm[J]. Tactical Missile Technology, 2024(5): 83–98. doi: 10.16358/j.issn.1009-1300.20240043. [13] PAN Zhenhua, ZHANG Chengxi, XIA Yuanqing, et al. An improved artificial potential field method for path planning and formation control of the multi-UAV systems[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(3): 1129–1133. doi: 10.1109/TCSII.2021.3112787. [14] CAO Yi, CHENG Xianghong, and MU Jinzhen. Concentrated coverage path planning algorithm of UAV formation for aerial photography[J]. IEEE Sensors Journal, 2022, 22(11): 11098–11111. doi: 10.1109/JSEN.2022.3168840. [15] 张栋, 李林, 王孟阳, 等. 不确定环境下多无人机察打一体任务规划方法[J]. 北京理工大学学报, 2025, 45(2): 111–125. doi: 10.15918/j.tbit1001-0645.2024.065.ZHANG Dong, LI Lin, WANG Mengyang, et al. Methodology for integrated reconnaissance-strike mission planning of multi-UAV under uncertain environments[J]. Transactions of Beijing Institute of Technology, 2025, 45(2): 111–125. doi: 10.15918/j.tbit1001-0645.2024.065. [16] 周桢林, 龙腾, 刘大卫, 等. 基于强化学习冲突消解的大规模无人机集群航迹规划方法[J]. 兵工学报, 2025, 46(5): 223–234. doi: 10.12382/bgxb.2024.1146.ZHOU Zhenlin, LONG Teng, LIU Dawei, et al. Path planning method for large-scale UAV swarms based on reinforcement learning conflict resolution[J]. Acta Armamentarii, 2025, 46(5): 223–234. doi: 10.12382/bgxb.2024.1146. [17] 陈进朝, 王洋, 张营, 等. 基于时空密度聚类的异构无人机集群覆盖路径规划方法[J]. 电子学报, 2025, 53(3): 705–715. doi: 10.12263/DZXB.20240258.CHEN Jinchao, WANG Yang, ZHANG Ying, et al. Coverage path planning for heterogeneous UAVs based on temporal-spatial density clustering[J]. Acta Electronica Sinica, 2025, 53(3): 705–715. doi: 10.12263/DZXB.20240258. [18] 张兴信, 宋健, 魏凌远. 一种改进的异构型无人机集群协同侦测任务规划方法[J]. 智能安全, 2025, 4(1): 1–11. doi: 10.12407/j.issn.2097-2075.2025.01.001.ZHANG Xingxin, SONG Jian, and WEI Lingyuan. Improved method for heterogeneous UAV swarm cooperative reconnaissance mission planning[J]. Artificial Intelligence Security, 2025, 4(1): 1–11. doi: 10.12407/j.issn.2097-2075.2025.01.001. [19] HU Jueming, AMMAR M, HUSSAIN B Z, et al. Reinforcement-learning-driven integrated detection and mitigation of UAV GPS spoofing attacks[J]. IEEE Internet of Things Journal, 2025, 12(18): 36926–36941. doi: 10.1109/JIOT.2025.3579307. [20] XUE Yuntao and CHEN Weisheng. Combining motion planner and deep reinforcement learning for UAV navigation in unknown environment[J]. IEEE Robotics and Automation Letters, 2024, 9(1): 635–642. doi: 10.1109/LRA.2023.3334978. [21] 赵天隆, 陈龙胜, 张存富, 等. 融合强化学习与改进人工势场的无人机编队路径规划[J]. 航空兵器, 2025, 32(5): 54-63. doi: 10.12132/ISSN.1673-5048.2025.0075.ZHAO Tianlong, CHEN Longsheng, ZHANG Cunfu, et al. UAV formation path planning based on reinforcement learning and improved artificial potential field[J]. Aero Weaponry, 2025, 32(5): 54-63. doi: 10.12132/ISSN.1673-5048.2025.0075. [22] 周从航, 李建兴, 石宇静, 等. 深度强化学习在无人机编队路径规划中的应用[J]. 电光与控制, 2024, 31(10): 27–33. doi: 10.3969/j.issn.1671-637X.2024.10.005.ZHOU Conghang, LI Jianxing, SHI Yujing, et al. Application of deep reinforcement learning in path planning of UAV formation[J]. Electronics Optics & Control, 2024, 31(10): 27–33. doi: 10.3969/j.issn.1671-637X.2024.10.005. [23] 陈士涛, 李大喜, 赵保军. 隐身有人/无人机组合编队协同空战概念研究[J]. 战术导弹技术, 2020(6): 75–80. doi: 10.16358/j.issn.1009-1300.2020.1.077.CHEN Shitao, LI Daxi, and ZHAO Baojun. Research on the concepts of collaborative dogfight for stealth aerial vehicle and unmanned aerial vehicle formation flying[J]. Tactical Missile Technology, 2020(6): 75–80. doi: 10.16358/j.issn.1009-1300.2020.1.077. [24] 郭亚楠, 曹小群, 何友, 等. 两栖作战中舰载无人机的应用与展望[J]. 兵工自动化, 2025, 44(2): 85–91. doi: 10.7690/bgzdh.2025.02.017.GUO Ya’nan, CAO Xiaoqun, HE You, et al. Application and prospect of shipborne UAV in amphibious warfare[J]. Ordnance Industry Automation, 2025, 44(2): 85–91. doi: 10.7690/bgzdh.2025.02.017. [25] WANG Yang, LI Menghan, YANG Jun, et al. Research on stealth route planning based on improved RRT algorithm[C]. The 5th International Conference on Mechanical, Control and Computer Engineering, Harbin, China, 2020: 1491–1495. doi: 10.1109/ICMCCE51767.2020.00327. [26] ZHANG Zitang, TANG Chunrui, and LI Yibing. Penetration path planning of stealthy UAV based on improved sparse A-star algorithm[C]. 2020 IEEE 3rd International Conference on Electronic Information and Communication Technology, Shenzhen, China, 2020: 388–392. doi: 10.1109/ICEICT51264.2020.9334311. [27] ORHAN E H. A path planning method for a low observable UAV in radar field[C]. 2020 International Conference on Unmanned Aircraft Systems, Athens, Greece, 2020: 41–47. doi: 10.1109/ICUAS48674.2020.9213945. [28] 张哲, 吴剑, 代冀阳, 等. 基于改进A-Star算法的隐身无人机快速突防航路规划[J]. 航空学报, 2020, 41(7): 323692. doi: 10.7527/S1000-6893.2020.23692.ZHANG Zhe, WU Jian, DAI Jiyang, et al. Fast penetration path planning for stealth UAV based on improved A-Star algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(7): 323692. doi: 10.7527/S1000-6893.2020.23692. [29] WEN Wen, SHI Chenguang, and ZHOU Jianjiang. Stealthy trajectories planning algorithm for UAV cluster in multivariate threat environment[C]. The 7th International Conference on Electronics Technology, Chengdu, China, 2024: 624–629. doi: 10.1109/ICET61945.2024.10672716. [30] 黄湘松, 王梦宇, 潘大鹏. 基于对抗强化学习的无人机逃离路径规划方法[J]. 航空学报, 2025, 46(17): 331637. doi: 10.7527/S1000-6893.2024.31637.HUANG Xiangsong, WANG Mengyu, and PAN Dapeng. Adversarial reinforcement learning-based UAV escape path planning method[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331637. doi: 10.7527/S1000-6893.2024.31637. [31] 张震宇. 面向目标RCS分布特征的雷达探测性能研究[D]. [硕士论文], 电子科技大学, 2024. doi: 10.27005/d.cnki.gdzku.2024.001824.ZHANG Zhenyu. Research on radar detection performance based on target RCS signatures[D]. [Master dissertation], University of Electronic Science and Technology of China, 2024. doi: 10.27005/d.cnki.gdzku.2024.001824. [32] ZHANG Dianlun, GAO Linsen, and TENG Tingting. Multi-static sonar distributed quantized detection fusion method based on N-P criterion[C]. 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans, Kobe, Japan, 2018: 1–4. doi: 10.1109/OCEANSKOBE.2018.8558818. [33] 肖冰. 组网雷达分布式干扰效果评估方法研究[D]. [硕士论文], 哈尔滨工程大学, 2021. doi: 10.27060/d.cnki.ghbcu.2021.000536.XIAO Bing. Research on evaluation method of distributed jamming effect of netted radar[D]. [Master dissertation], Harbin Engineering University, 2021. doi: 10.27060/d.cnki.ghbcu.2021.000536. [34] 闻雯, 时晨光, 周建江. 多元威胁环境下无人机集群隐身航迹规划算法[J]. 系统工程与电子技术, 2025, 47(9): 2971–2984. doi: 10.12305/j.issn.1001-506X.2025.09.18.WEN Wen, SHI Chenguang, and ZHOU Jianjiang. Stealthy paths planning algorithm for UAV swarm in multiple-threat environment[J]. Systems Engineering and Electronics, 2025, 47(9): 2971–2984. doi: 10.12305/j.issn.1001-506X.2025.09.18. [35] 张哲. 隐身无人机快速突防航路规划技术研究[D]. [硕士论文], 南昌航空大学, 2021. doi: 10.27233/d.cnki.gnchc.2021.000105.ZHANG Zhe. Research on rapidly penetration path planning technique for stealth unmanned aerial vehicles[D]. [Master dissertation], Nanchang Hangkong University, 2021. doi: 10.27233/d.cnki.gnchc.2021.000105. [36] ZHANG Weilong, SHAN L, CHANG L, et al. SVF-RRT*: A stream-based VF-RRT* for USVs path planning considering ocean currents[J]. IEEE Robotics and Automation Letters, 2023, 8(4): 2413–2420. doi: 10.1109/LRA.2023.3245409. [37] CONG Kuidi, HU Yuhui, XU Lei, et al. Safe model predictive tracking with an improved APF-RRT* path planning for UGVs[C]. 2023 IEEE International Conference on Unmanned Systems, Hefei, China, 2023: 1165–1170. doi: 10.1109/ICUS58632.2023.10318271. -

 下载:
下载:


图(9) / 表(6)
计量
- 文章访问数: 747
- HTML全文浏览量: 519
- PDF下载量: 64
- 被引次数: 0
