

Finite-time Adaptive Sliding Mode Control of Servo Motors Considering Frictional Nonlinearity and Unknown Loads
-
摘要: 为了解决超快激光无限视场加工中存在的高精度要求小视场与大范围加工需求之间的矛盾,该文提出一种基于自适应扰动观测器的有限时间滑模控制策略,该模型能够保证跟踪误差在有限时间内收敛到原点附近的邻域,有效补偿了未知负载扰动和输入端摩擦非线性行为。该文将被控系统中的未知负载扰动与摩擦非线性等复杂因素统一建模为集总扰动项,从而显著提升了系统动力学模型的普适性。该方法融合了径向基神经网络(RBFNN)设计有限时间自适应扰动观测器,实现对集总扰动的精确补偿。基于扰动观测构建的有限时间滑模控制方案,使得电机的输出角位置快速精确跟踪期望轨迹。最后,通过Matlab仿真分析验证了该控制方法的可行性和优越性。
-
关键词:
- 超快激光无限视场加工 /
- 伺服电机 /
- 自适应扰动观测器 /
- 有限时间控制 /
- 滑模控制
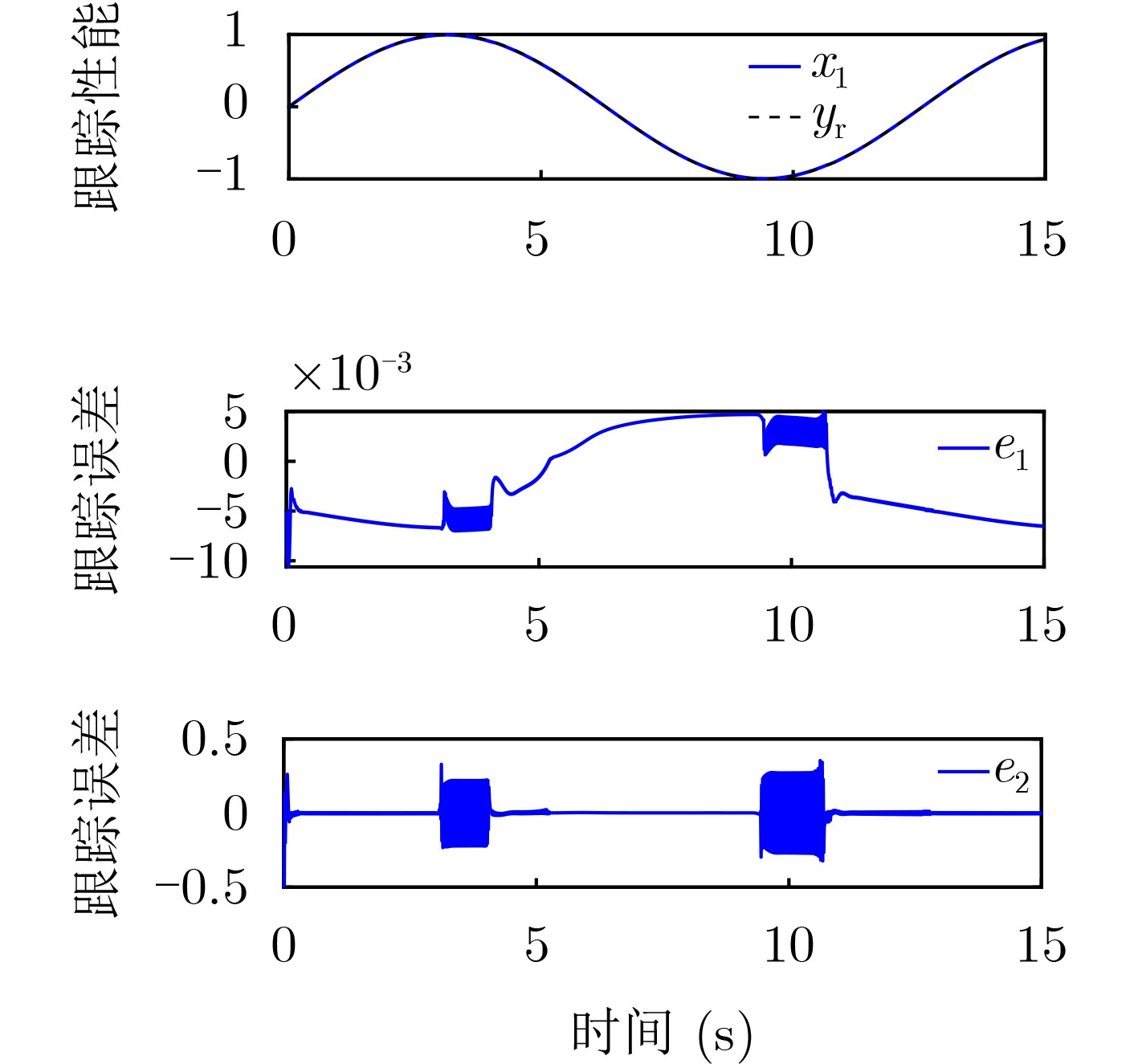
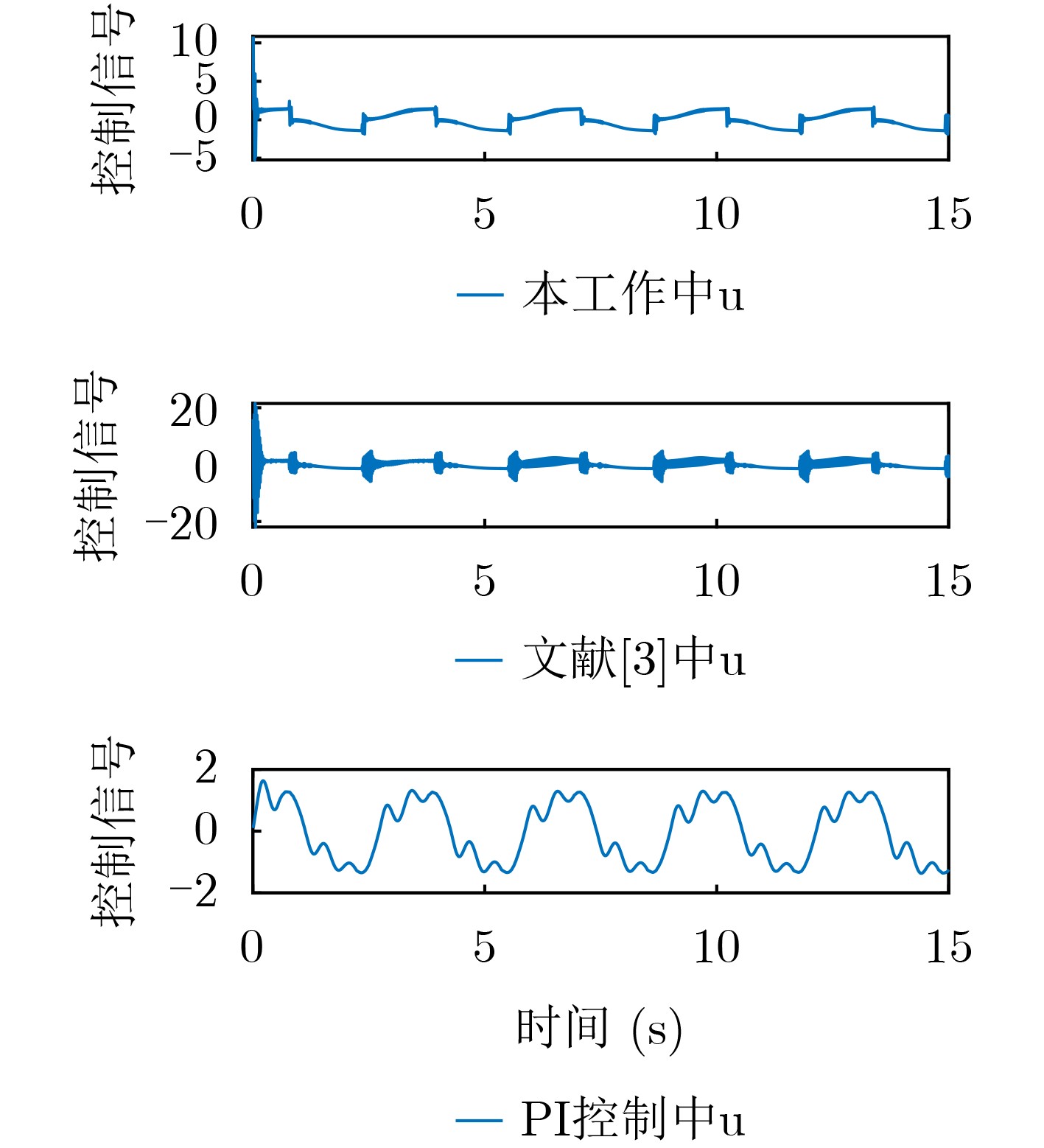
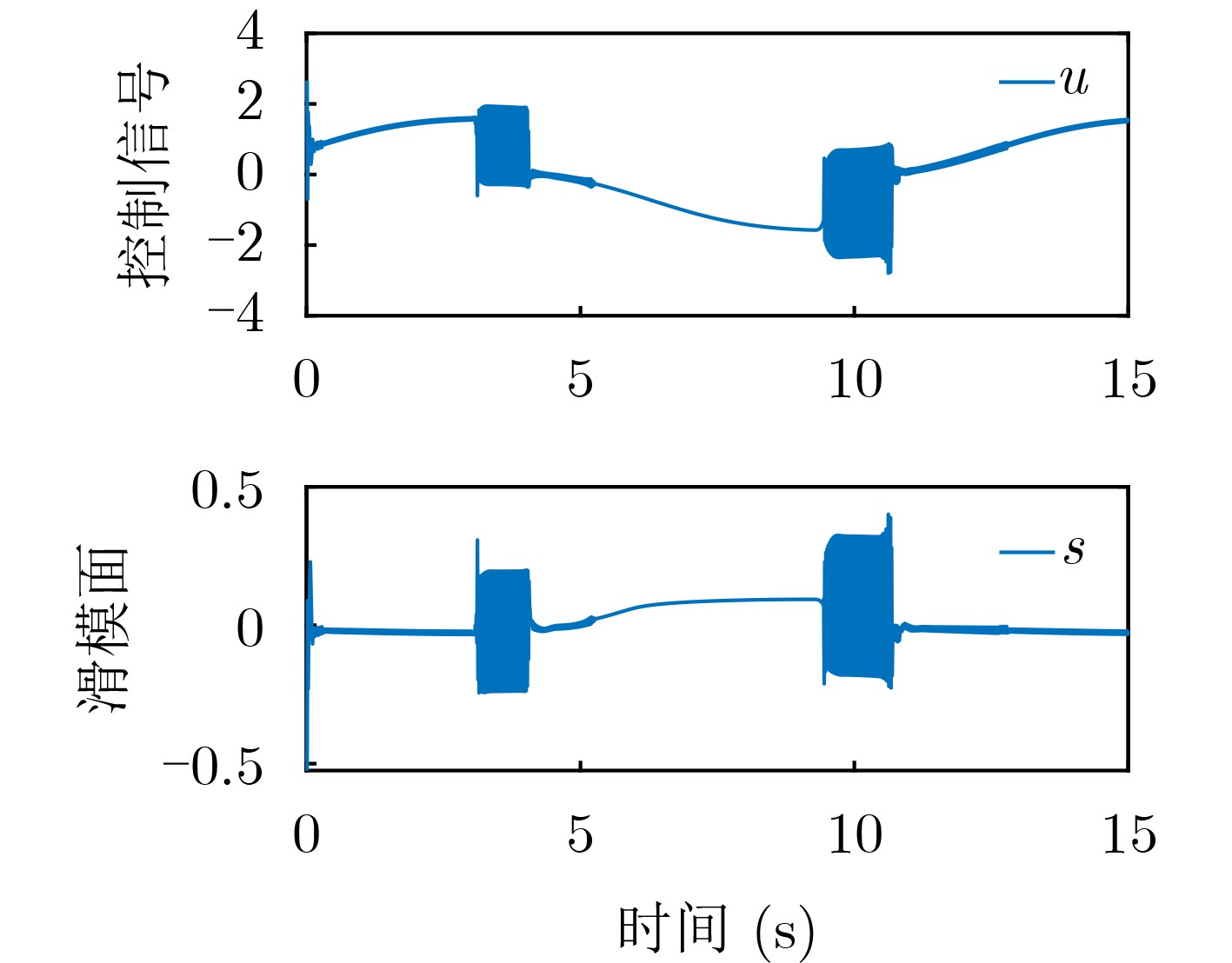
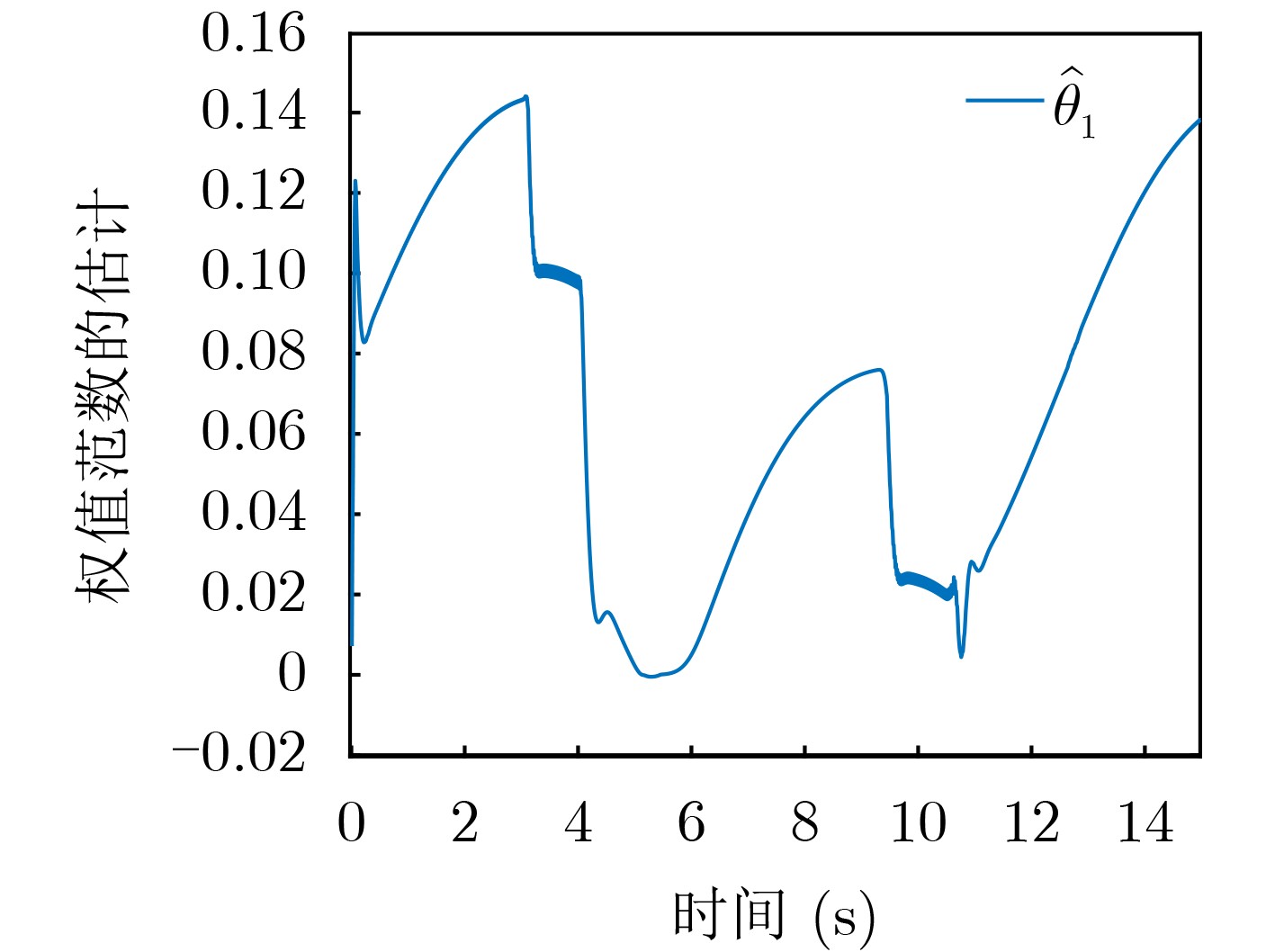
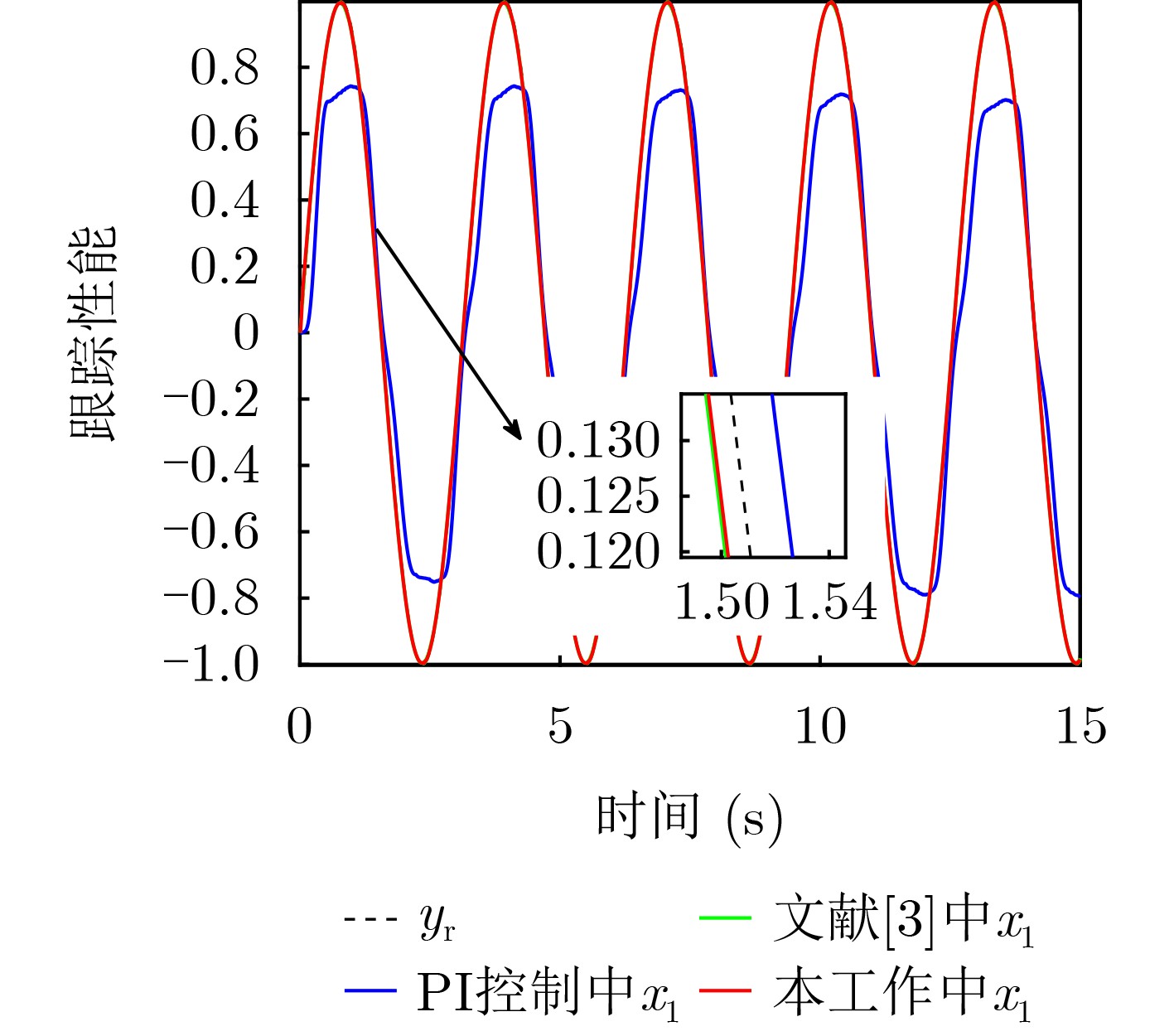
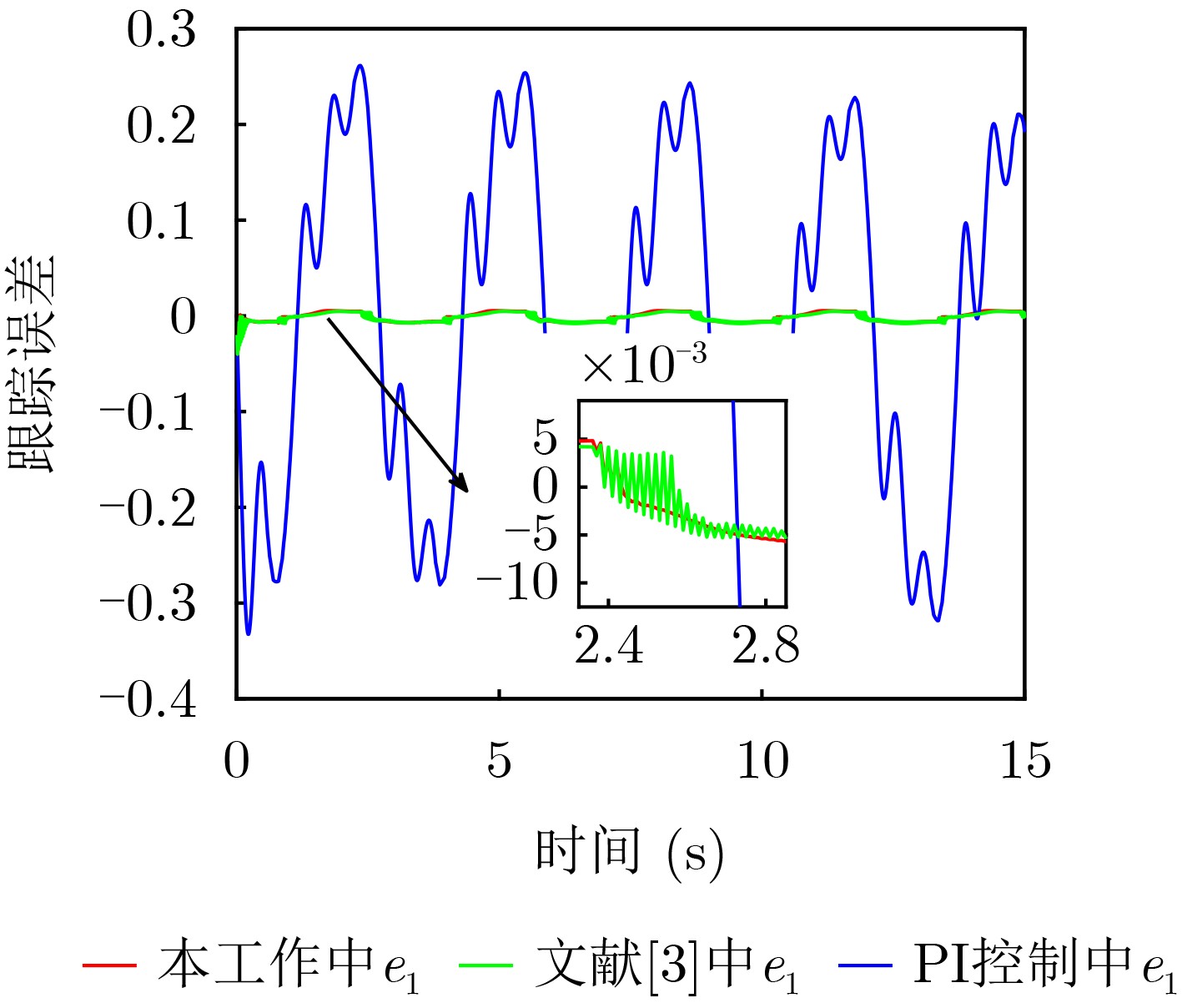
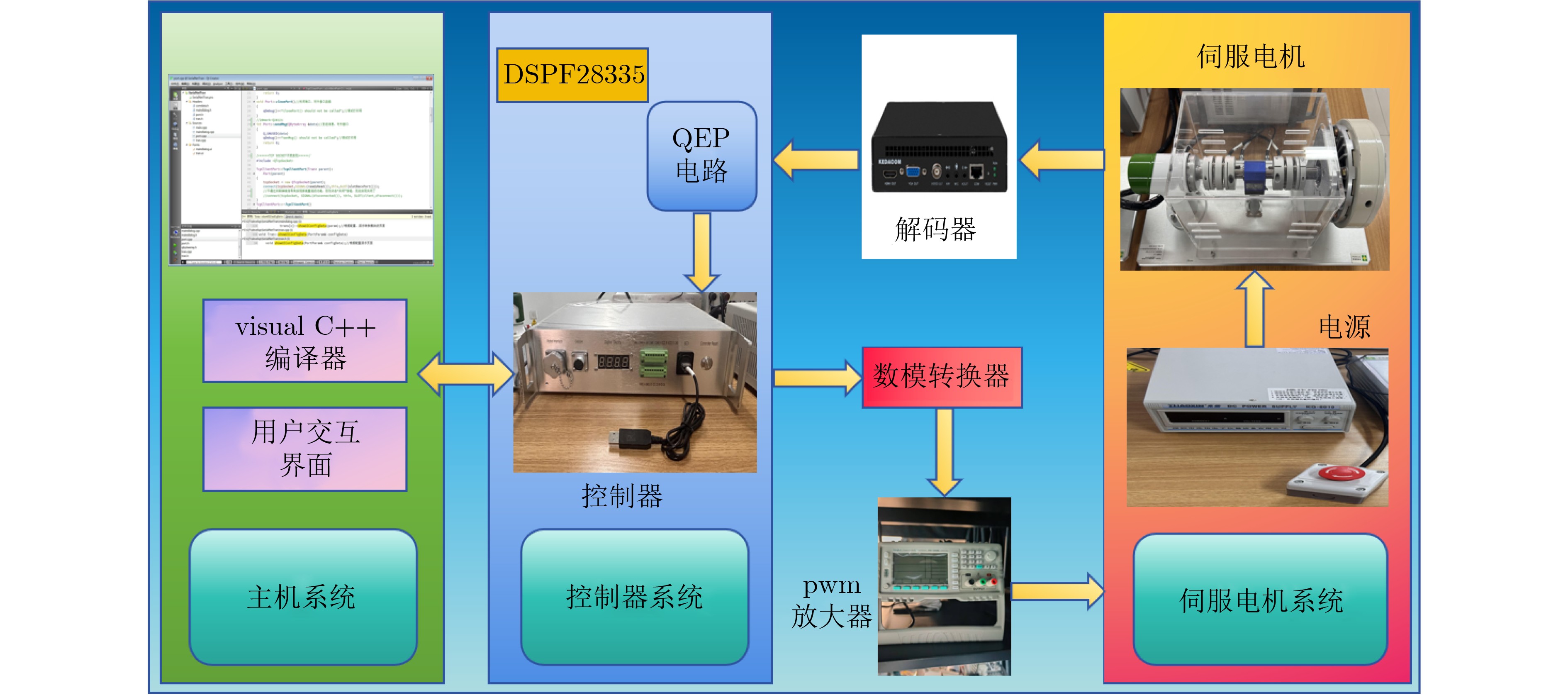
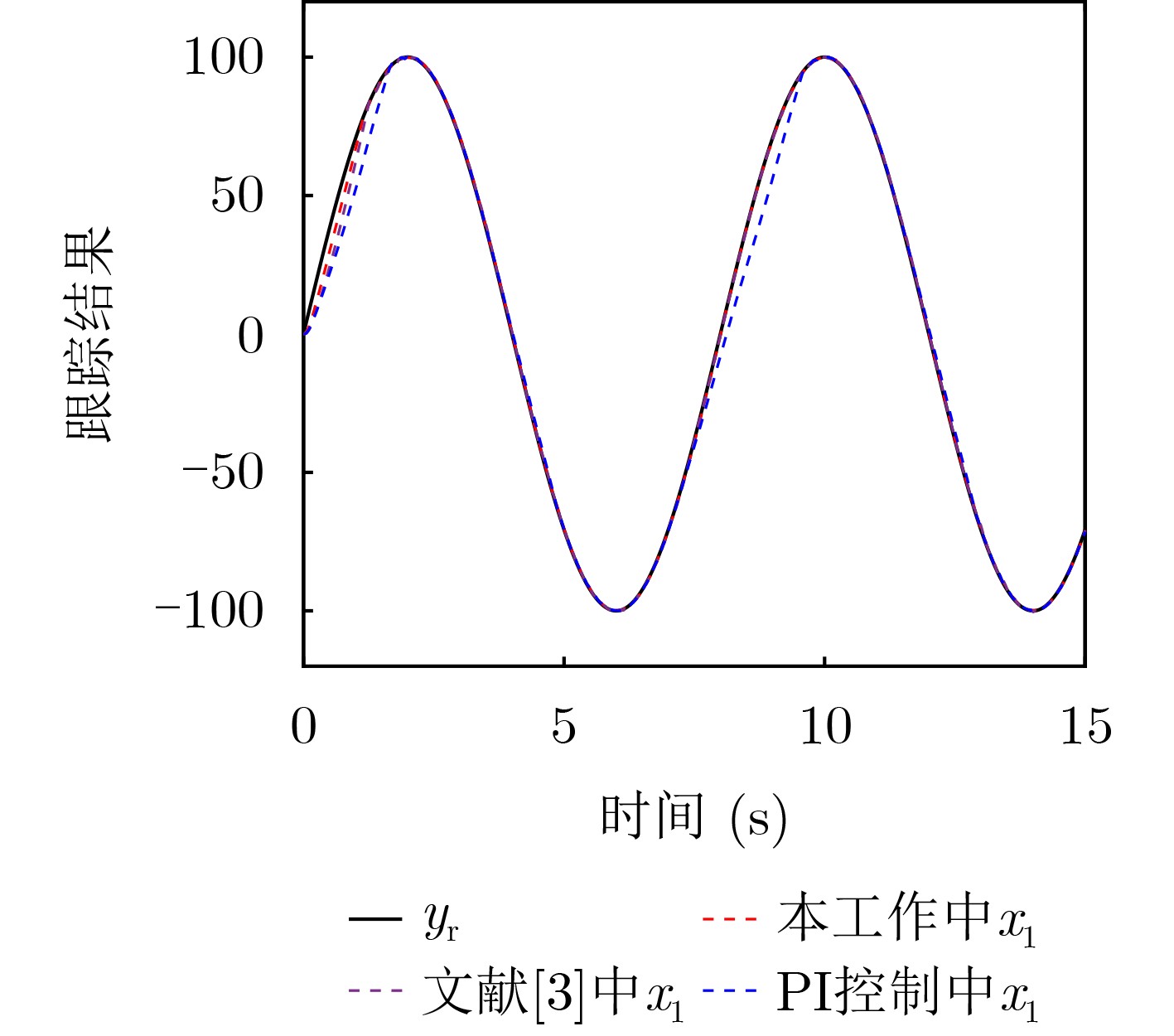
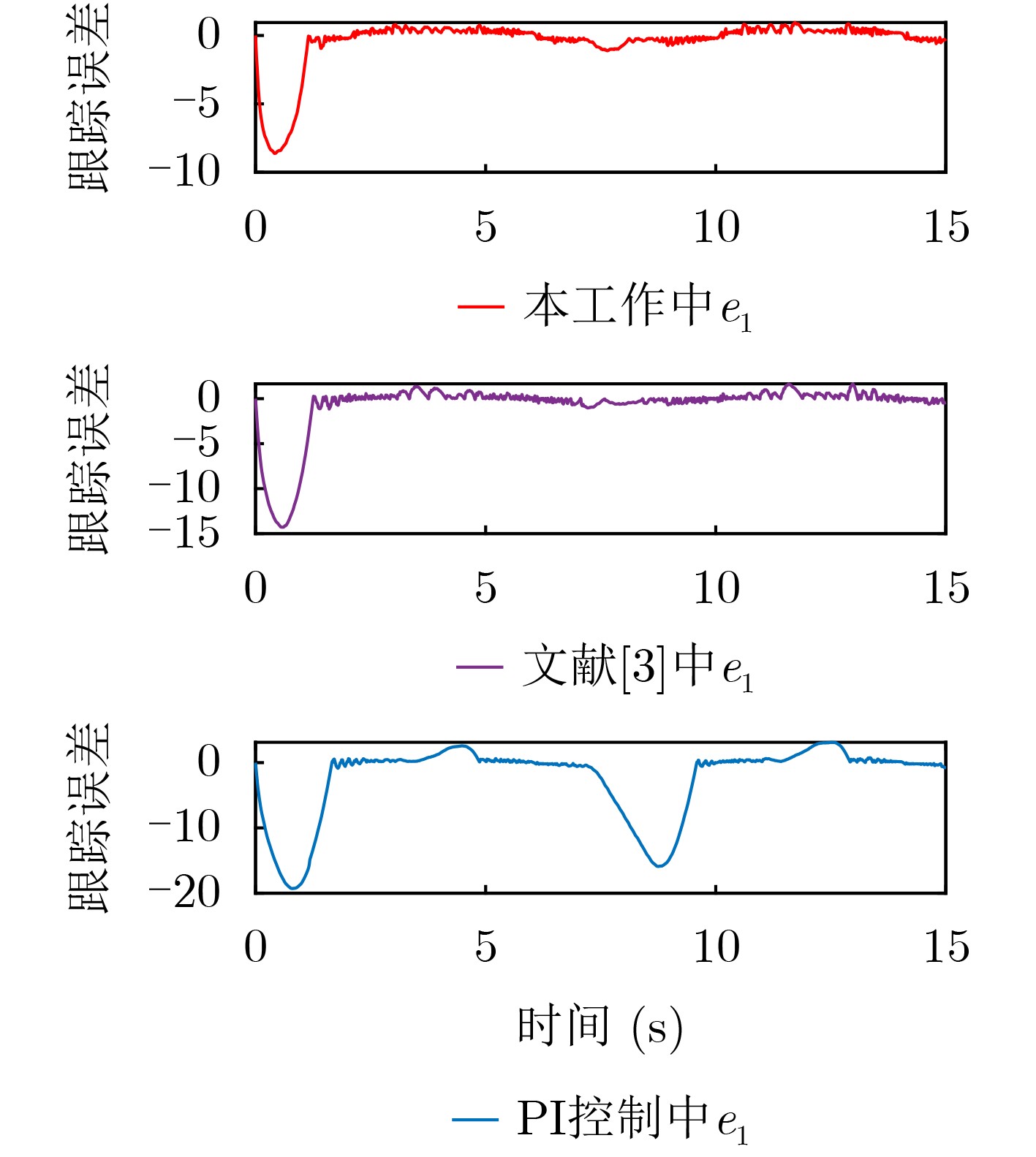
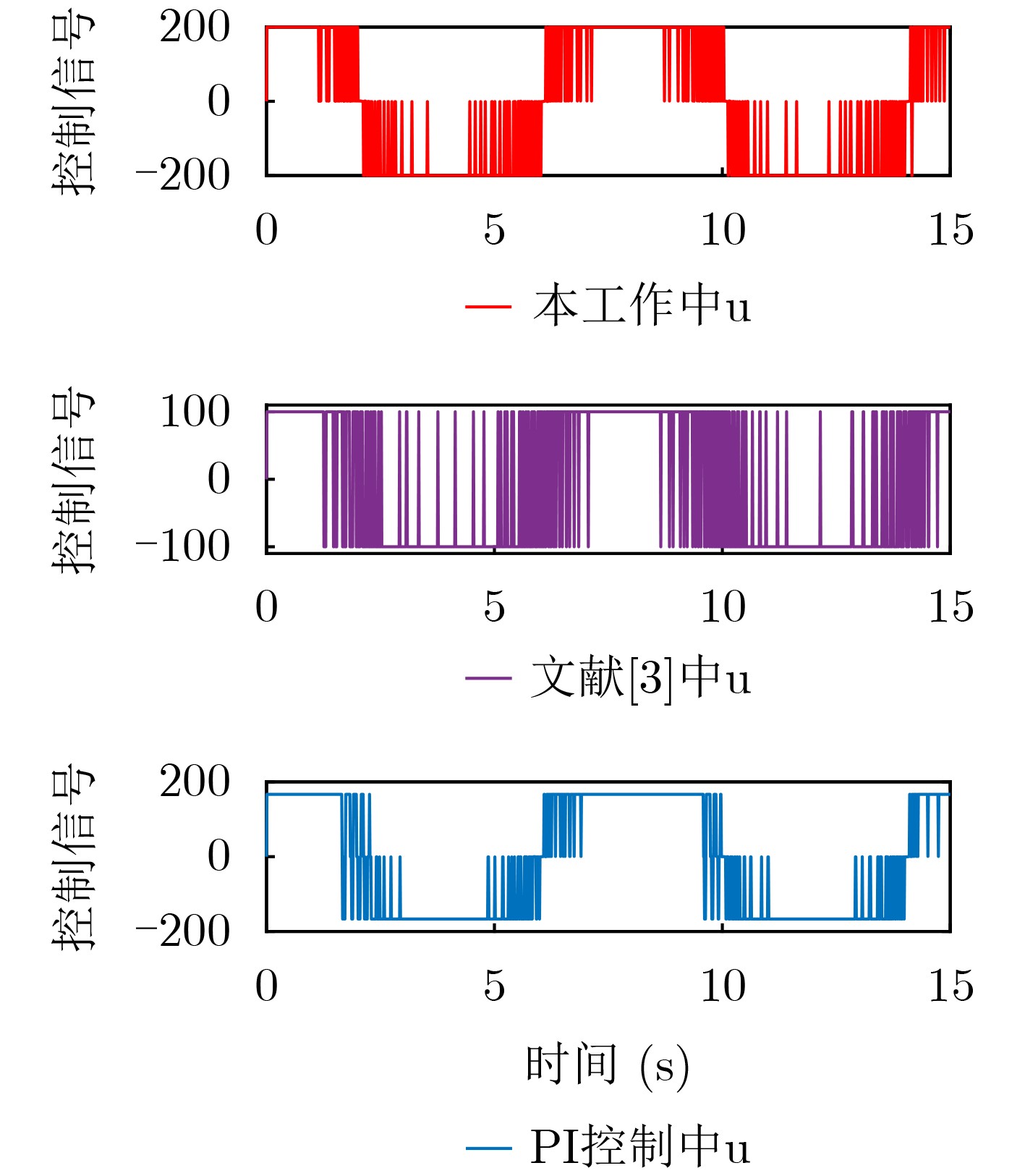
Abstract:Objective Ultra-fast laser processing with an infinite field of view requires servo motor systems with superior tracking accuracy and robustness. However, such systems are highly nonlinear and affected by coupled unknown load disturbances and complex friction, which constrain the performance of conventional controllers. Although Sliding Mode Control (SMC) exhibits inherent robustness, traditional SMC and observer designs cannot achieve accurate finite-time disturbance compensation under strong nonlinearities, thus limiting high-speed and high-precision trajectory tracking. To address this limitation, a novel finite-time adaptive SMC approach is proposed to ensure rapid and precise angular position tracking within a finite time, satisfying the stringent synchronization requirements of advanced laser processing systems. Methods A novel control strategy is developed by integrating an adaptive disturbance observer fused with a Radial Basis Function Neural Network (RBFNN) and finite-time Sliding Mode Control (SMC). First, the unknown load disturbance and complex frictional nonlinear dynamics are combined into a unified "lumped disturbance" term, improving model generality and the ability to represent real operating conditions. Second, a finite-time adaptive disturbance observer is constructed to estimate this lumped disturbance. The observer utilizes the universal approximation capability of the RBFNN to learn and approximate the dynamic characteristics of unknown disturbances online. Simultaneously, a finite-time adaptive law based on the error norm is introduced to update the neural network weights in real time, ensuring rapid and accurate finite-time estimation of the lumped disturbance while reducing dependence on precise model parameters. Based on this design, a finite-time SMC is developed. The controller uses the observer’s disturbance estimation as a feedforward compensation term, incorporates a carefully formulated finite-time sliding surface and equivalent control law, and introduces a saturation function to suppress control input chattering. A suitable Lyapunov function is then constructed, and the finite-time stability theory is rigorously applied to prove the practical finite-time convergence of both the adaptive observer and the closed-loop control system, guaranteeing that the system tracking error converges to a bounded neighborhood near the origin within finite time. Results and Discussions To verify the effectiveness and superiority of the proposed control strategy, a typical Permanent Magnet Synchronous Motor (PMSM) servo system model is constructed in the MATLAB environment, and a simulation scenario with desired trajectories of varying frequencies is established. The proposed method is comprehensively compared with the widely used Proportional–Integral (PI) control and the advanced method reported in reference [7]. Simulation results demonstrate the following: 1. Tracking performance: Under various reference trajectories, the proposed controller enables the system to accurately follow the target trajectory with a tracking error substantially smaller than that of the PI controller. Compared with the method in reference [7], it achieves smoother responses and smaller residual errors, effectively eliminating the chattering observed in some operating conditions of the latter. 2 Disturbance rejection and robustness: The adaptive disturbance observer based on the RBFNN rapidly and effectively learns and compensates for the lumped disturbance composed of unknown load variations and frictional nonlinearities. Even in the presence of these disturbances, the proposed controller maintains high-precision trajectory tracking, demonstrating strong disturbance rejection and robustness to system parameter variations. 3. Control input characteristics: Compared with the reference methods, the control signal of the proposed approach quickly stabilizes after the initial transient phase, effectively suppressing chattering caused by high-frequency switching. The amplitude range of the control input remains reasonable, facilitating practical actuator implementation. 4. Comprehensive evaluation: Based on multiple error performance indices, including Integral Squared Error (ISE), Integral Absolute Error (IAE), Time-weighted Integral Absolute Error (ITAE), and Time-weighted Integral Squared Error (ITSE), the proposed controller consistently outperforms both PI control and the method in reference [7]. It demonstrates comprehensive advantages in suppressing transient errors rapidly and reducing overall error accumulation. The method also improves steady-state accuracy and achieves a balanced response speed with effective noise attenuation. 5. Observer performance: The RBFNN weight norm estimation converges rapidly and stabilizes at a low level after initial adaptation, confirming the effectiveness of the proposed adaptive law and the learning efficiency of the observer. Conclusions A finite-time sliding mode control strategy with an adaptive disturbance observer is proposed for servo systems used in ultra-fast laser processing. The method models unknown load disturbances and frictional nonlinearities as a lumped disturbance term. An adaptive observer, integrating an RBF neural network with a finite-time mechanism, accurately estimates this disturbance for real-time compensation. Based on the observer, a finite-time SMC law is formulated, and the practical finite-time stability of the closed-loop system is theoretically proven. Simulations conducted on a permanent magnet synchronous motor platform confirm that the proposed approach achieves superior tracking accuracy, robustness, and control smoothness compared with conventional PI and existing advanced methods. This work offers an effective solution for achieving high-precision control in nonlinear systems subject to strong disturbances. -
表 1 伺服电机的模型参数
参数 数值 说明 参数 数值 说明 $ {A_1} $ 0.25 摩擦系数 $ {A_2} $ 0.5 摩擦系数 $ {A_3} $ 0.01 摩擦系数 $ {P_1} $ 100 摩擦系数 $ {P_2} $ 1 摩擦系数 $ {P_3} $ 100 摩擦系数 $ {J_{\mathrm{L}}} $ 0.0113 负载转动惯量 $ {b_m} $ 0.015 电机黏性摩擦系数 $ n $ 11.67 齿轮传动比 $ {J_m} $ 0.0026 电机转动惯量  下载: 导出CSV
下载: 导出CSV
-
[1] WEN Yao, JIAO Chunting, SU Xiaojie, et al. Event-triggered sliding-mode control of networked fuzzy systems with strict dissipativity[J]. IEEE Transactions on Fuzzy Systems, 2022, 30(5): 1371–1381. doi: 10.1109/TFUZZ.2021.3058601. [2] 黄依婷, 沈建新, 王云冲, 等. 基于递推最小二乘法观测器的永磁同步伺服电机变参数滑模控制[J]. 中国电机工程学报, 2022, 42(18): 6835–6845. doi: 10.13334/j.0258-8013.pcsee.211725.HUANG Yiting, SHEN Jianxin, WANG Yunchong, et al. Variable parameter sliding mode control of permanent magnet synchronous servo machine based on recursive least square observer[J]. Proceedings of the CSEE, 2022, 42(18): 6835–6845. doi: 10.13334/j.0258-8013.pcsee.211725. [3] 李东博, 李旭, 刘海波, 等. 基于模糊干扰观测器的精密直驱系统滑模位置控制[J]. 制造技术与机床, 2025(2): 108–115,128. doi: 10.19287/j.mtmt.1005-2402.2025.02.014.LI Dongbo, LI Xu, LIU Haibo, et al. Sliding mode position control of precision direct drive system based on fuzzy disturbance observer[J]. Manufacturing Technology & Machine Tool, 2025(2): 108–115,128. doi: 10.19287/j.mtmt.1005-2402.2025.02.014. [4] 黄宴委, 李奕鋆, 李东方. 基于地形和刚度自适应的四足机器人姿态控制[J]. 机器人, 2024, 46(6): 713–724,731. doi: 10.13973/j.cnki.robot.230304.HUANG Yanwei, LI Yijun, and LI Dongfang. Attitude control of quadruped robots based on terrain and stiffness adaptation[J]. Robot, 2024, 46(6): 713–724,731. doi: 10.13973/j.cnki.robot.230304. [5] 范亚洲, 孙林祥, 白雪剑, 等. 基于自适应反正切非奇异终端滑模的水下机械臂轨迹跟踪控制[J]. 控制与决策, 2025, 40(1): 205–213. doi: 10.13195/j.kzyjc.2024.0341.FAN Yazhou, SUN Linxiang, BAI Xuejian, et al. Trajectory tracking control of underwater manipulator based on adaptive arctangent non-singular terminal sliding mode control[J]. Control and Decision, 2025, 40(1): 205–213. doi: 10.13195/j.kzyjc.2024.0341. [6] FAN Lu, ZHANG Ancai, LIANG Xiao, et al. Fixed-time stabilization of underactuated cart-pendulum system based on hierarchical sliding mode control method[J]. Nonlinear Dynamics, 2024, 112(13): 11187–11194. doi: 10.1007/s11071-024-09650-4. [7] YU Jiqiang, LIU Weirui, ZHANG Zheng, et al. Thrust ripple suppression strategy for precision machining platform by using predicted current sliding control[J]. International Journal of Precision Engineering and Manufacturing, 2024, 25(10): 1987–2001. doi: 10.1007/s12541-024-01020-9. [8] BAUM N and MINOR M A. Identification and control of a soft-robotic bladder towards impedance-style haptic terrain display[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 12355–12362. doi: 10.1109/LRA.2022.3216251. [9] 刘鑫. 混合磁悬浮人工心脏泵设计优化与生理控制研究[D]. [博士论文], 中国科学技术大学, 2024. doi: 10.27517/d.cnki.gzkju.2024.000285.LIU Xin. Design optimization and physiological control research of the hybrid magnetic levitation artificial heart pump[D]. [Ph. D. dissertation], University of Science and Technology of China, 2024. doi: 10.27517/d.cnki.gzkju.2024.000285. [10] 张扬, 夏庆超, 杨灿军, 等. 水下机器人-机械手系统抓取作业轨迹跟踪控制[J]. 哈尔滨工程大学学报, 2025, 46(3): 540–549. doi: 10.11990/jheu.202312031.ZHANG Yang, XIA Qingchao, YANG Canjun, et al. Trajectory tracking control of underwater vehicle-manipulator system during the grasping process[J]. Journal of Harbin Engineering University, 2025, 46(3): 540–549. doi: 10.11990/jheu.202312031. [11] 颜闽秀, 郭子琛. 卫星激光通信跟踪机构新型滑模反步控制方法[J/OL]. 电光与控制, 2024: 1–7. https://link.cnki.net/urlid/41.1227.tn.20241203.1552.002, 2024.YAN Minxiu and GUO Zichen. AA novel sliding mode backstepping control method for satellite laser communication tracking mechanism [J/OL]. Electronics Optics & Control, 2024: 1–7. https://link.cnki.net/urlid/41.1227.tn.20241203.1552.002, 2024. [12] 张玉培, 张宇飞. 采用模糊滑模控制算法的制动系统稳定性研究[J]. 中国工程机械学报, 2024, 22(5): 604–608. doi: 10.15999/j.cnki.311926.2024.05.022.ZHANG Yupei and ZHANG Yufei. Research on stability of braking system using fuzzy sliding mode control algorithm[J]. Chinese Journal of Construction Machinery, 2024, 22(5): 604–608. doi: 10.15999/j.cnki.311926.2024.05.022. [13] 仲如杰, 王亚刚, 陈怡, 等. 基于NDO和IAOVA优化的机械臂滑模控制[J]. 控制工程, 2024: 1–12. doi: 10.14107/j.cnki.kzgc.20240789.ZHONG Rujie, WANG Yagang, CHEN Yi, et al. Sliding mode control of robotic manipulator based on nonlinear disturbance observer and IAOVA optimization[J]. Control Engineering of China, 2024: 1–12. doi: 10.14107/j.cnki.kzgc.20240789. [14] 冯建鑫, 巩建雄, 李昊阳, 等. 基于改进扰动观测器的永磁同步电机鲁棒自适应控制[J]. 吉林大学学报(工学版), 2024: 1–8. doi: 10.13229/j.cnki.jdxbgxb.20240790.FENG Jianxin, GONG Jianxiong, LI Haoyang, et al. Robust adaptive control of permanent magnet synchronous motor based on improved disturbance observer[J]. Journal of Jilin University (Engineering and Technology Edition), 2024: 1–8. doi: 10.13229/j.cnki.jdxbgxb.20240790. [15] 吴灏, 王淇锋, 王其, 等. 基于摩擦扰动补偿的机械臂碰撞检测方法[J]. 机械设计, 2024, 41(9): 101–110. doi: 10.13841/j.cnki.jxsj.2024.09.023.WU Hao, WANG Qifeng, WANG Qi, et al. Method for collision detection of manipulator based on friction disturbance compensation[J]. Journal of Machine Design, 2024, 41(9): 101–110. doi: 10.13841/j.cnki.jxsj.2024.09.023. [16] 景亮, 冯瑞, 沈跃, 等. 基于扰动观测的4WSS电驱动无人农机路径跟踪控制方法[J]. 农业工程学报, 2024, 40(23): 73–81. doi: 10.11975/j.issn.1002-6819.202403212.JING Liang, FENG Rui, SHEN Yue, et al. Path tracking control method for 4WSS unmanned agricultural machinery based on disturbance observation[J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(23): 73–81. doi: 10.11975/j.issn.1002-6819.202403212. [17] 梁娟, 许谦, 王娜, 等. 基于扰动观测器的超螺旋终端滑模天线伺服控制方法研究[J]. 天文学报, 2025, 66(1): 22–30. doi: 10.15940/j.cnki.0001-5245.2025.01.003.LIANG Juan, XU Qian, WANG Na, et al. Research on antenna servo control method based on super twisting terminal sliding mode of disturbance observer[J]. Acta Astronomica Sinica, 2025, 66(1): 22–30. doi: 10.15940/j.cnki.0001-5245.2025.01.003. [18] 朱志斌, 刘忠信, 王付永, 等. 基于混合事件触发机制的多智能体系统有限时间包容控制[J]. 控制与决策, 2025, 40(5): 1494–1502. doi: 10.13195/j.kzyjc.2024.0803.ZHU Zhibin, LIU Zhongxin, WANG Fuyong, et al. Finite-time containment control for multi-agent systems via hybrid event-triggered mechanism[J]. Control and Decision, 2025, 40(5): 1494–1502. doi: 10.13195/j.kzyjc.2024.0803. [19] XIE Shuzong, CHEN Qiang, and YANG Qinmin. Adaptive fuzzy predefined-time dynamic surface control for attitude tracking of spacecraft with state constraints[J]. IEEE Transactions on Fuzzy Systems, 2023, 31(7): 2292–2304. doi: 10.1109/TFUZZ.2022.3223253. [20] 马寅, 王尉, 马国龙, 等. 基于TVCNN的高铁用铝合金型材自适应激光焊接研究[J]. 中国激光, 2025, 52(8): 0802101. doi: 10.3788/CJL241337.MA Yin, WANG Wei, MA Guolong, et al. Adaptive laser welding of aluminum alloy profiles for high‐speed rail based on TVCNN[J]. Chinese Journal of Lasers, 2025, 52(8): 0802101. doi: 10.3788/CJL241337. -

 下载:
下载:


图(10) / 表(2)
计量
- 文章访问数: 451
- HTML全文浏览量: 280
- PDF下载量: 25
- 被引次数: 0
