

A 3D Localization Algorithm for Unmanned Aerial Vehicles in Distributed Air-Ground Integrated Sensing and Communication Networks
-
摘要: 无人机定位不仅能够提高无人机操作的安全性和效率,还为各种低空经济活动提供了技术保障。传统蜂窝定位技术依赖于专用的定位导频,不仅需要大量的导频开销,且在3D定位精度上存在限制。针对该问题,该文提出了一种空地协同的通感一体化网络中的多基站分布式无人机3D定位方法,根据多信号分类算法(MUSIC)得到多个发射信号经过目标无人机折射并到达接收站的时延估计,进而利用椭圆定位算法得到无人机的3D位置估计。进一步地,推导了基于分布式通感一体化网络的无人机3D位置估计的误差克拉美罗下界(CRLB),并与所提位置估计算法的蒙特卡洛性能仿真进行对比,验证了所提算法的性能在高信噪比(SNR)区域能够逼近CRLB。研究结果表明,所提算法能够在无需定位导频的情况下保证目标无人机的3D定位精度,并且利用无人机基站作为通感信号收发机和边缘计算中心辅助地面基站进行目标无人机的3D定位,相较于仅依赖地面基站的传统定位算法,可以有效地提高目标无人机高度的估计精度。Abstract:
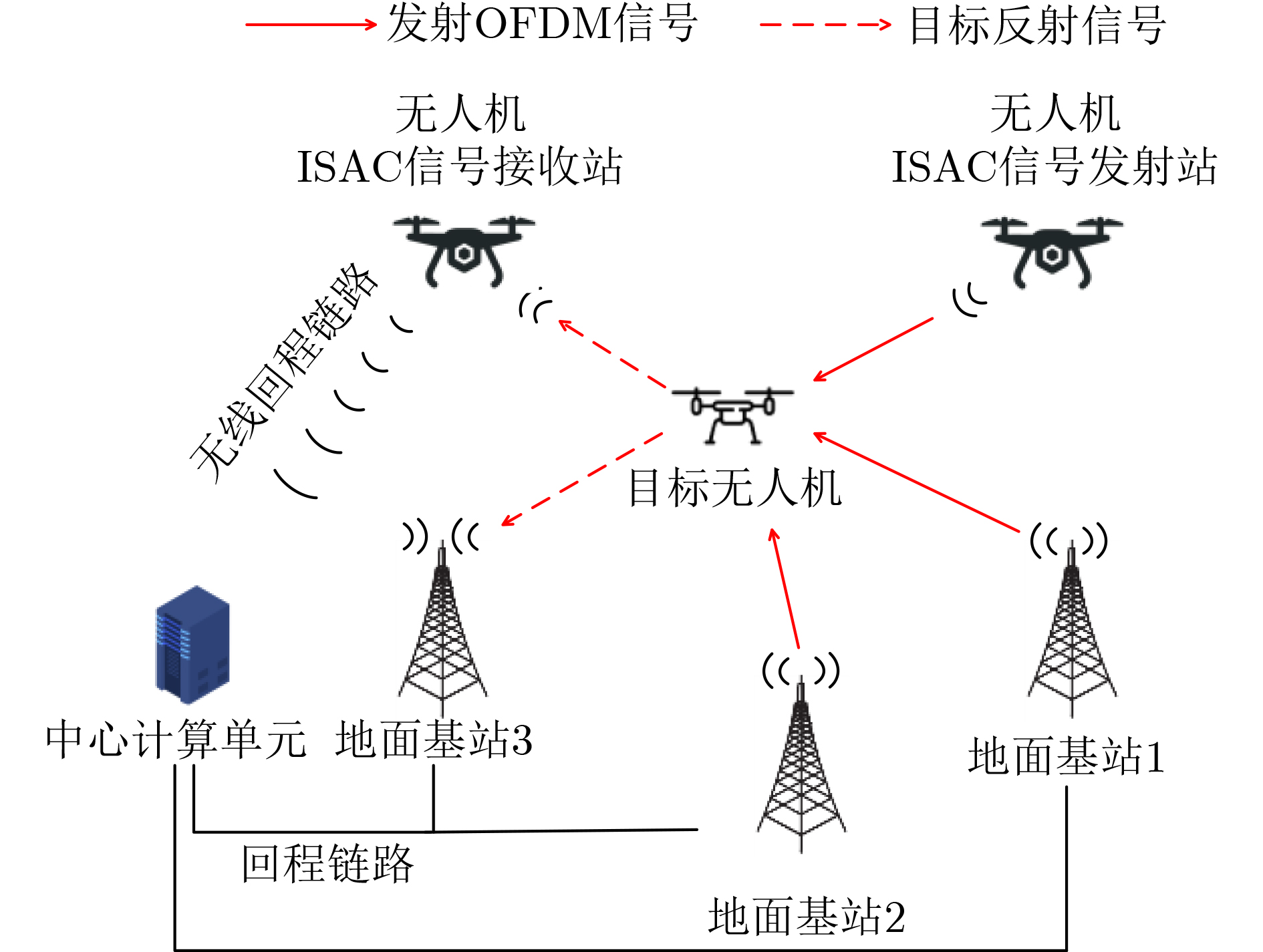
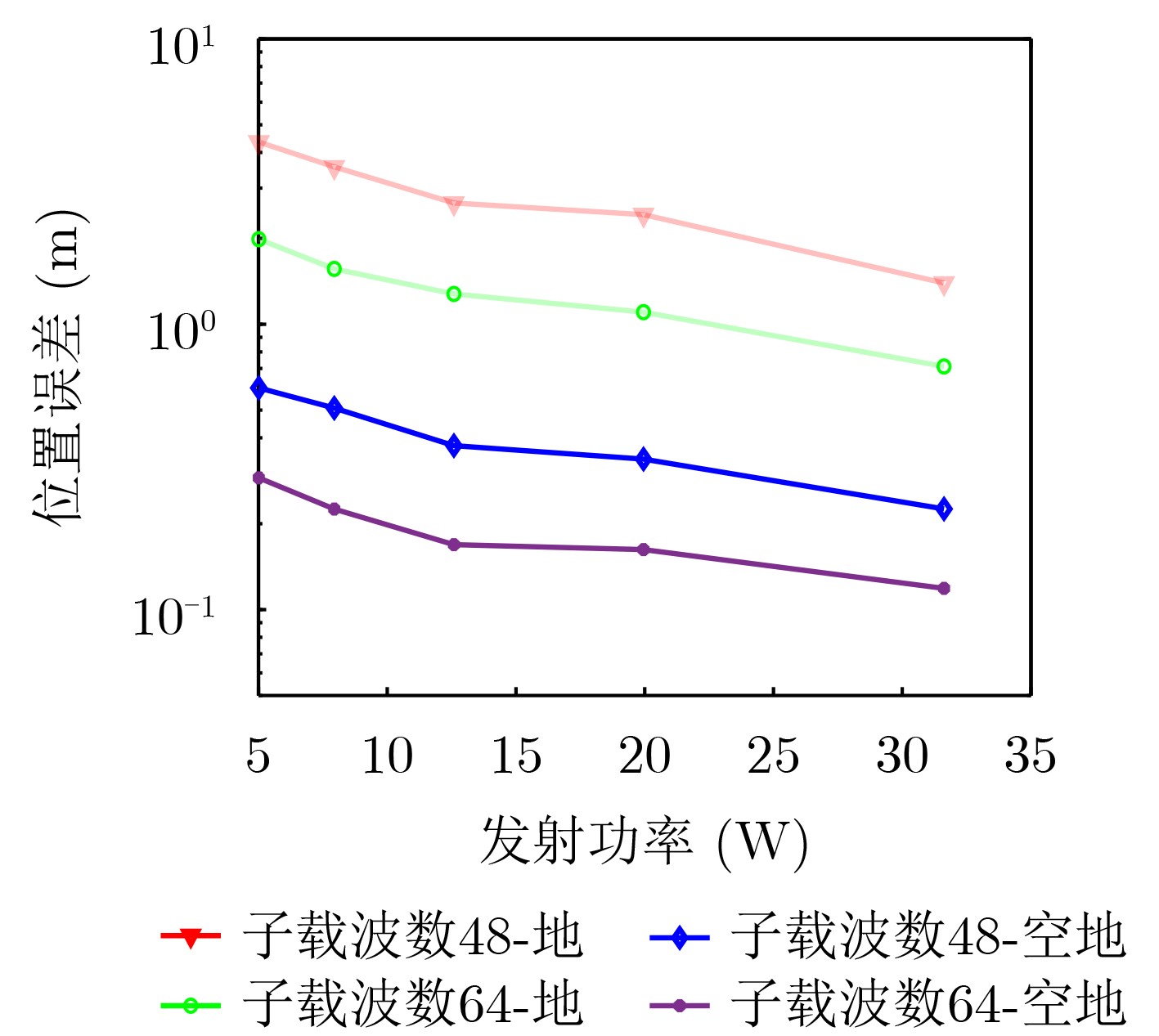
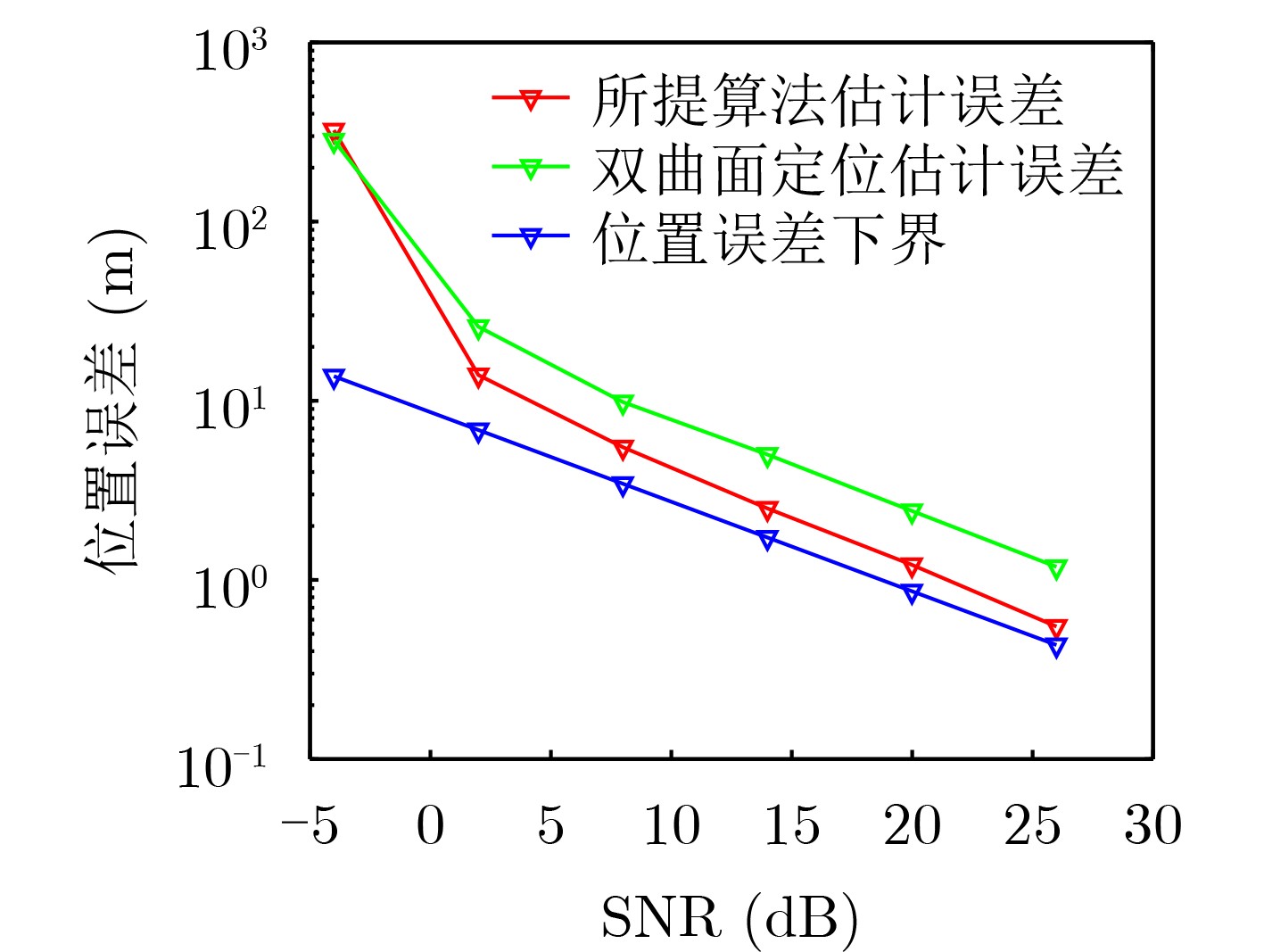
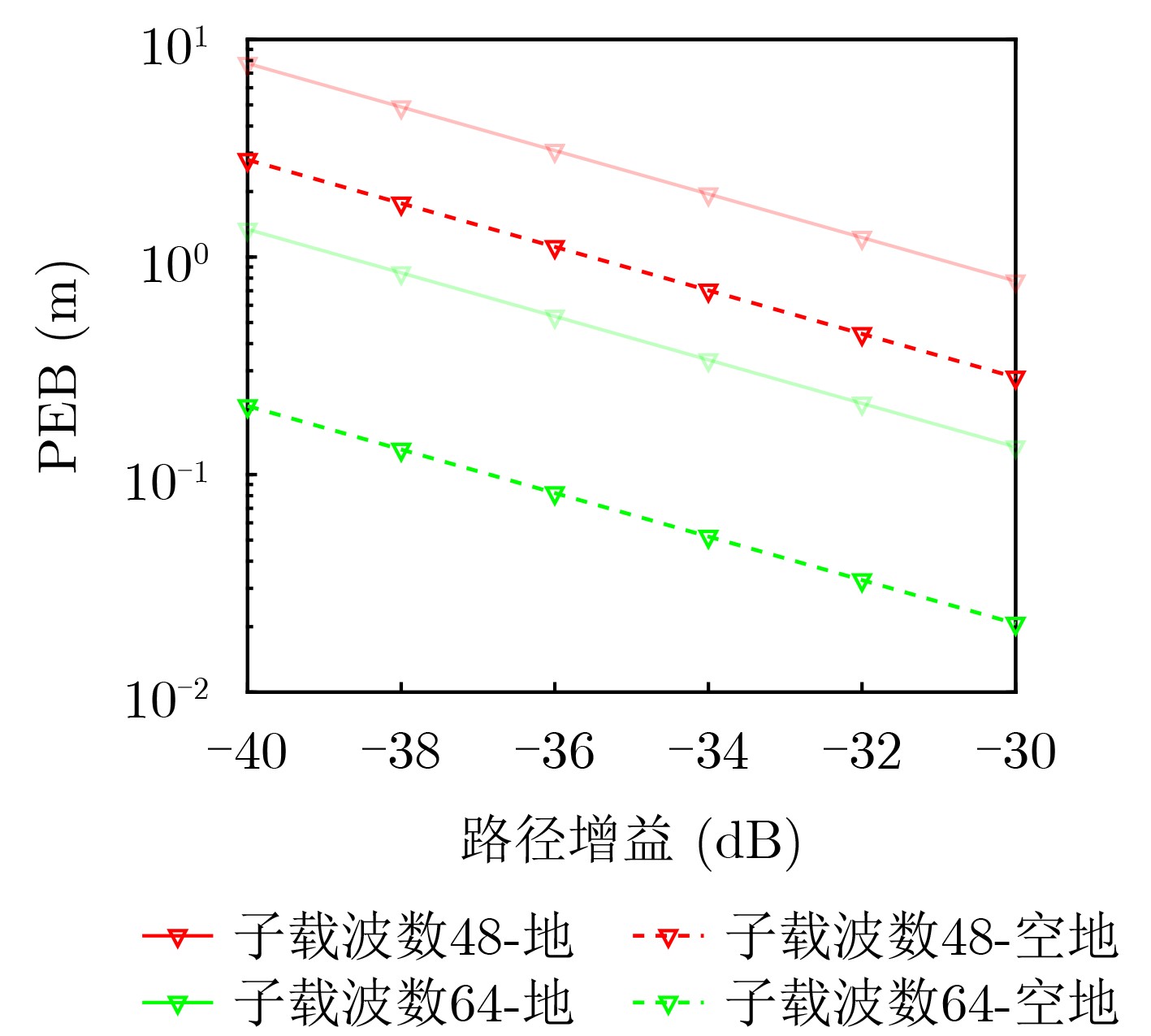
Objective The low-altitude economy, driven by the widespread adoption of drones and other unmanned aerial vehicles (UAVs), supports a range of applications across industries such as aerial imaging, precision agriculture, disaster response, and logistics. Precise Three-Dimensional (3D) positioning is essential to ensure the safety and efficiency of UAV operations in these scenarios. However, conventional cellular-based positioning approaches rely heavily on dedicated pilot signals, which impose significant overhead and limit 3D positioning accuracy. Integrated sensing and communication (ISAC) technology offers a promising alternative by enabling receivers to extract positioning information from reflected communication signals, thereby reducing dependence on pilot signals. Furthermore, a distributed network of ISAC transceivers can enhance sensing coverage and data diversity, improving localization performance. Building on these principles, this study proposes a 3D positioning algorithm based on distributed ISAC networks. The algorithm achieves high positioning accuracy without additional pilot signal overhead, demonstrating strong potential to support UAV applications within the low-altitude economy. Methods Motivated by the principles of distributed radar systems, this study proposes a cooperative 3D positioning method for UAVs within a distributed ISAC network comprising both ground base stations (BSs) and UAV-mounted BSs. Firstly, each ISAC receiver—whether ground-based or UAV-mounted—independently collects communication signals reflected by the target UAV from multiple ISAC transmitters. Secondly, each ISAC receiver serves as an edge computing node and derives a coarse estimate of the UAV’s 3D coordinates. Specifically, the receiver applies the MUltiple SIgnal Classification (MUSIC) algorithm to estimate the time delays of Orthogonal Frequency-Division Multiplexing (OFDM) signals refracted by the UAV. This is accomplished by exploiting the common delay steering vector structure across different ISAC transmitters. The resulting time-delay estimates are input into an ellipse-based positioning algorithm to obtain the initial 3D position of the UAV. By processing signals from at least three BSs, the UAV’s position can be triangulated via the intersection of ellipses. The coarse 3D position estimates are then transmitted to a central computing unit, where a weighted averaging method refines them to achieve higher accuracy. This hierarchical approach ensures robust localization performance, even when individual edge estimates are degraded due to noise, interference, or geometric limitations that prevent reliable ellipse-based estimation. To evaluate the proposed algorithm, the Cramér–Rao Lower Bound (CRLB) of the 3D positioning error is derived under the assumption of circularly symmetric complex Gaussian noise in the communication channel model. Results and Discussions The combined use of ground and aerial BSs yields lower position estimation errors compared to networks consisting solely of ground BSs ( Fig. 2 ). This improvement arises from the additional orientation information provided by UAV-mounted BSs, which enhances the accuracy of height estimation and thereby improves overall 3D localization performance. In low Signal-to-Noise Ratio (SNR) conditions, positioning accuracy declines significantly due to the failure to distinguish the noise subspace from the signal subspace. This impairs the formation of spatial spectrum peaks, degrading the performance of the MUSIC algorithm (Fig. 3 ). Under such conditions, errors in time delay estimation become the primary source of positioning inaccuracy. At high SNR, despite reduced noise influence, the hyperbolic positioning algorithm may still converge to a local optimum due to suboptimal initial position selection, resulting in persistent estimation errors. In comparison, the proposed algorithm maintains superior performance across both low and high SNR regimes (Fig. 3 ). As the path gain increases, the Position Error Bound(PEB) of the estimation error decreases, indicating improved theoretical positioning accuracy(Fig. 4 ). Moreover, increasing the number of receiving stations significantly enhances localization performance. When SNR variation among BSs exceeds differences in geometric distribution, SNR-based weighted averaging yields better positioning results than Geometric Dilution of Precision (GDOP)-based averaging (Fig. 5 ).Conclusions Monte Carlo simulations confirm that the proposed algorithm achieves high-accuracy 3D positioning without requiring dedicated pilot signals. The results further indicate that UAV-mounted BSs, when functioning as ISAC transceivers and edge computing centers, can effectively support ground BSs in estimating the 3D position of target UAVs. Compared with positioning algorithms that use only ground BSs, this configuration notably improves altitude estimation accuracy. -
表 1 仿真参数表
参数 参数设置 载波频率 3 GHz 载波间隔 30 MHz 目标无人机位置 (200,300,50) 接收站1位置 (0,0,15) 接收站2位置 (100,100,15) 接收站3位置 (–100,–100,15) 发射站1位置 (400,0,20) 发射站2位置 (152,469,20) 发射站3位置 (–400,290,20) 空中发射站位置 (–400,290,200)  下载: 导出CSV
下载: 导出CSV
-
[1] CAO Xianbin, YANG Peng, ALZENAD M, et al. Airborne communication networks: A survey[J]. IEEE Journal on Selected Areas in Communications, 2018, 36(9): 1907–1926. doi: 10.1109/JSAC.2018.2864423. [2] YU Peng, LI Yijing, ZHANG Manjun, et al. Self-organized and distributed green resource allocation for space–air–ground IoT networks[J]. IEEE Internet of Things Journal, 2023, 10(11): 9385–9397. doi: 10.1109/JIOT.2022.3222238. [3] WU Xuewei, WANG Li, XU Lianming, et al. Joint optimization of UAVs 3-D placement and power allocation in emergency communications[C]. 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 2021: 1–6. doi: 10.1109/GLOBECOM46510.2021.9685172. [4] ZHUANG Ke, XU Lianming, LI Liang, et al. GA-MADDPG: A demand-aware UAV network adaptation method for joint communication and positioning in emergency scenarios[C]. 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, United Kingdom, 2023: 1–6. doi: 10.1109/WCNC55385.2023.10118678. [5] WANG Jian, VARSHNEY N, GENTILE C, et al. Integrated sensing and communication: Enabling techniques, applications, tools and data sets, standardization, and future directions[J]. IEEE Internet of Things Journal, 2022, 9(23): 23416–23440. doi: 10.1109/JIOT.2022.3190845. [6] XIAO Zhiqiang and ZENG Yong. Full-duplex integrated sensing and communication: Waveform design and performance analysis[C]. 2021 13th International Conference on Wireless Communications and Signal Processing (WCSP), Changsha, China, 2021: 1–5. doi: 10.1109/WCSP52459.2021.9613663. [7] LI Songyi and LIU Zhenyu. A DFRC based on multichannel and spatial information fusion for multiradar communication[J]. IEEE Antennas and Wireless Propagation Letters, 2024, 23(5): 1423–1427. doi: 10.1109/LAWP.2024.3357855. [8] LIU Fan, ZHOU Longfei, MASOUROS C, et al. Toward dual-functional radar-communication systems: Optimal waveform design[J]. IEEE Transactions on Signal Processing, 2018, 66(16): 4264–4279. doi: 10.1109/TSP.2018.2847648. [9] HUANG Tianyao, SHLEZINGER N, XU Xingyu, et al. MAJoRCom: A dual-function radar communication system using index modulation[J]. IEEE Transactions on Signal Processing, 2020, 68: 3423–3438. doi: 10.1109/TSP.2020.2994394. [10] SOLTANI M, POURAHMADI V, and SHEIKHZADEH H. Pilot pattern design for deep learning-based channel estimation in OFDM systems[J]. IEEE Wireless Communications Letters, 2020, 9(12): 2173–2176. doi: 10.1109/LWC.2020.3016603. [11] LIANG Junhui, HE Jin, and YU Wenxian. 3-D parameterized multipath channel estimation for massive MIMO–OFDM systems[J]. IEEE Systems Journal, 2022, 16(3): 4094–4105. doi: 10.1109/JSYST.2022.3152730. [12] LYU Zhonghao, ZHU Guangxu, and XU Jie. Joint maneuver and beamforming design for UAV-enabled integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(4): 2424–2440. doi: 10.1109/TWC.2022.3211533. [13] CHEN Xu, FENG Zhiyong, WEI Zhiqing, et al. Performance of joint sensing-communication cooperative sensing UAV network[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 15545–15556. doi: 10.1109/TVT.2020.3042466. [14] MENG Kaitao, WU Qingqing, MA Shaodan, et al. Throughput maximization for UAV-enabled integrated periodic sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(1): 671–687. doi: 10.1109/TWC.2022.3197623. [15] CUI Yanpeng, FENG Zhiyong, ZHANG Qixun, et al. Toward trusted and swift UAV communication: ISAC-enabled dual identity mapping[J]. IEEE Wireless Communications, 2023, 30(1): 58–66. doi: 10.1109/MWC.003.2200207. [16] ZHAO Jingcheng, FU Xinru, YANG Zongkai, et al. Radar-assisted UAV detection and identification based on 5G in the Internet of Things[J]. Wireless Communications and Mobile Computing, 2019, 2019: 2850263. doi: 10.1155/2019/2850263. [17] AI Xiaofeng, ZHANG Linyu, ZHENG Yuqing, et al. Passive detection experiment of UAV based on 5G new radio signal[C]. 2021 Photonics & Electromagnetics Research Symposium (PIERS), Hangzhou, China, 2021: 2124–2129. doi: 10.1109/PIERS53385.2021.9695141. [18] YANG Xiaoqi, HUO Kai, JIANG Weidong, et al. A passive radar system for detecting UAV based on the OFDM communication signal[C]. 2016 Progress in Electromagnetic Research Symposium (PIERS), Shanghai, China, 2016: 2757–2762. doi: 10.1109/PIERS.2016.7735118. -

 下载:
下载:



图(5) / 表(1)
计量
- 文章访问数: 989
- HTML全文浏览量: 647
- PDF下载量: 138
- 被引次数: 0
