

Research on Fusion Localization Algorithm of Indoor UWB and IMU Assisted by GPR Error Calibration
-
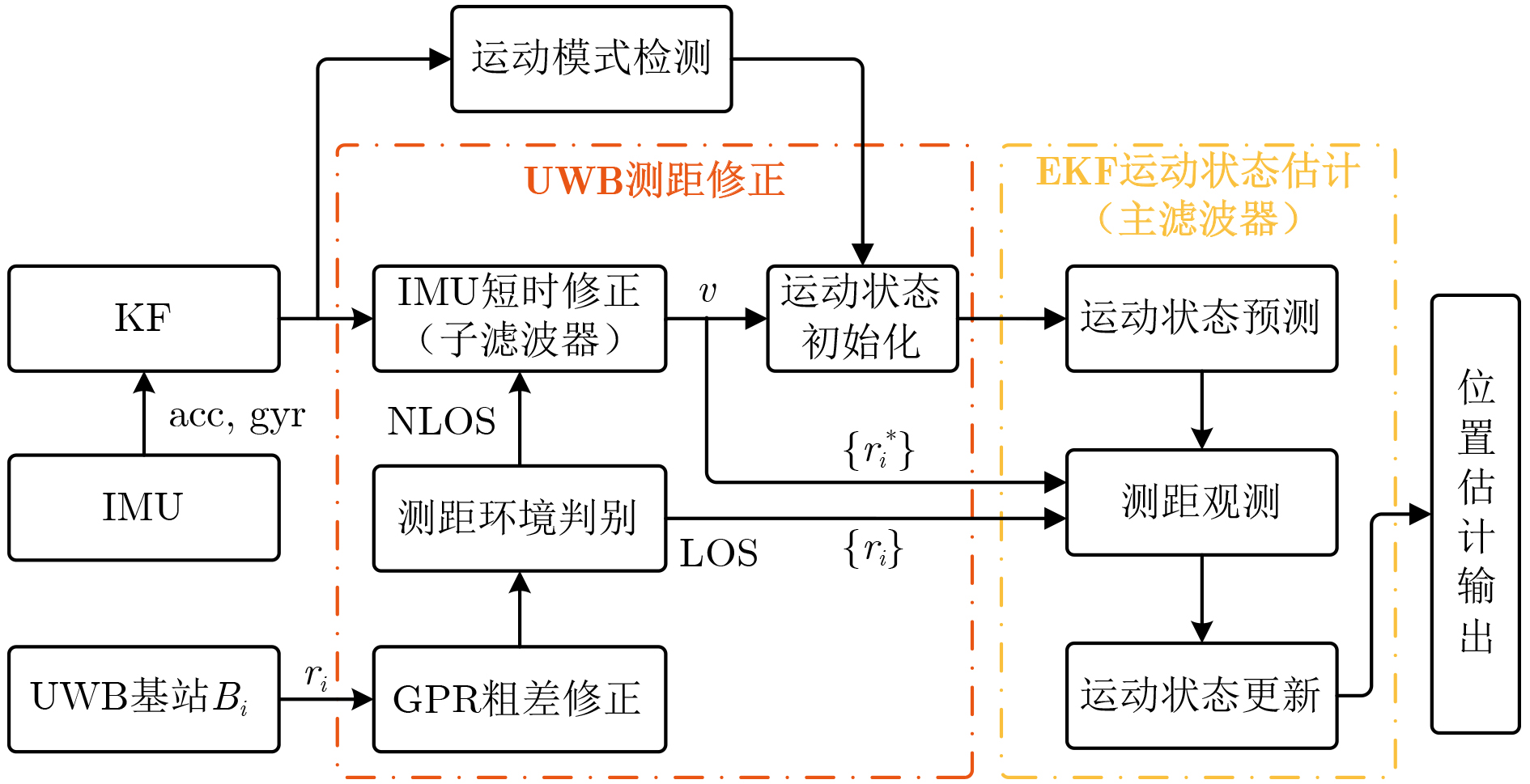
摘要: 室内环境下超宽带(UWB)误差标定困难,静态和动态目标在视距和非视距情况下的定位精度均难以保证。为此该文提出了一种高斯过程回归(GPR)误差标定辅助的室内惯性测量单元(IMU)与UWB融合定位算法(GIU-EKF)。在视距情况下通过对视距环境UWB测距误差进行采样分析,建立GPR误差标定模型关联二维坐标与测距误差。使用误差标定模型计算所有坐标点UWB测距值的概率分布集合,利用待测点范围内的坐标样本及其归一化概率计算测距拟合值,实时抑制视距环境测距误差。当UWB测距增量超过阈值判别为非视距环境。非视距情况下通过子级扩展卡尔曼滤波器(EKF)融合UWB信息和短时IMU信息实时修正运动过程中测距值的非视距误差,并将其送入主EKF实现运动状态估计更新。实验结果表明,在视距情况下标签处于静态和动态时经GPR粗差修正后的定位误差较修正前分别下降64%和58%,GIU-EKF算法在论文所述的3种非视距环境下对低速运动目标能保持稳健的运动状态估计,平均定位误差达到7.5 cm;运动速度为0.2~0.8 m/s的标签,定位误差小于10 cm。
-
关键词:
- 室内定位 /
- 超宽带误差标定 /
- 高斯过程回归 /
- 扩展卡尔曼滤波器 /
- 惯性测量单元短时估计
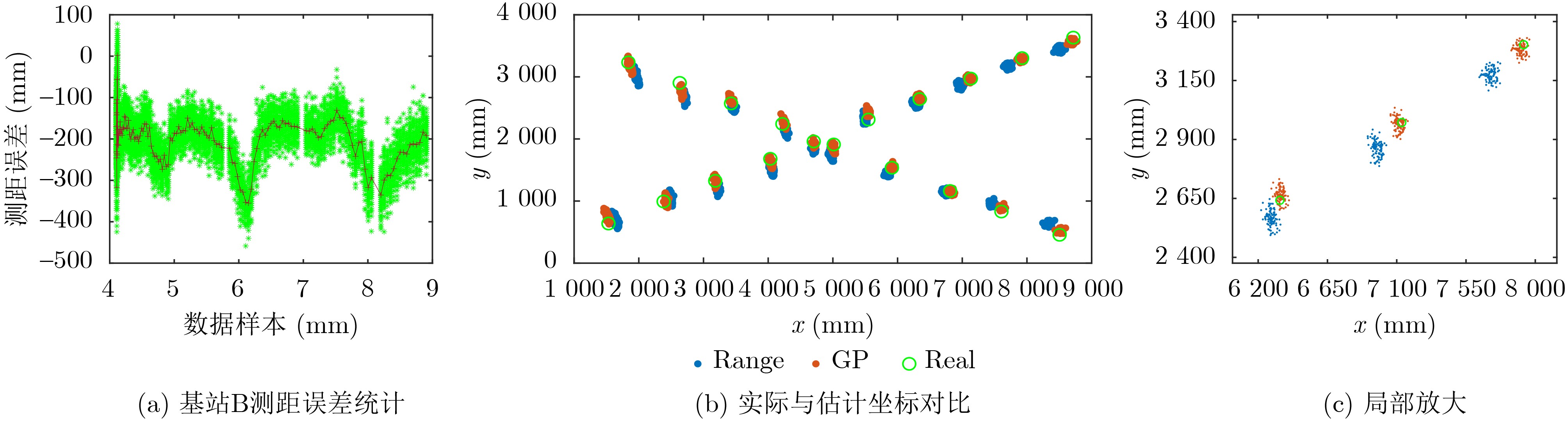
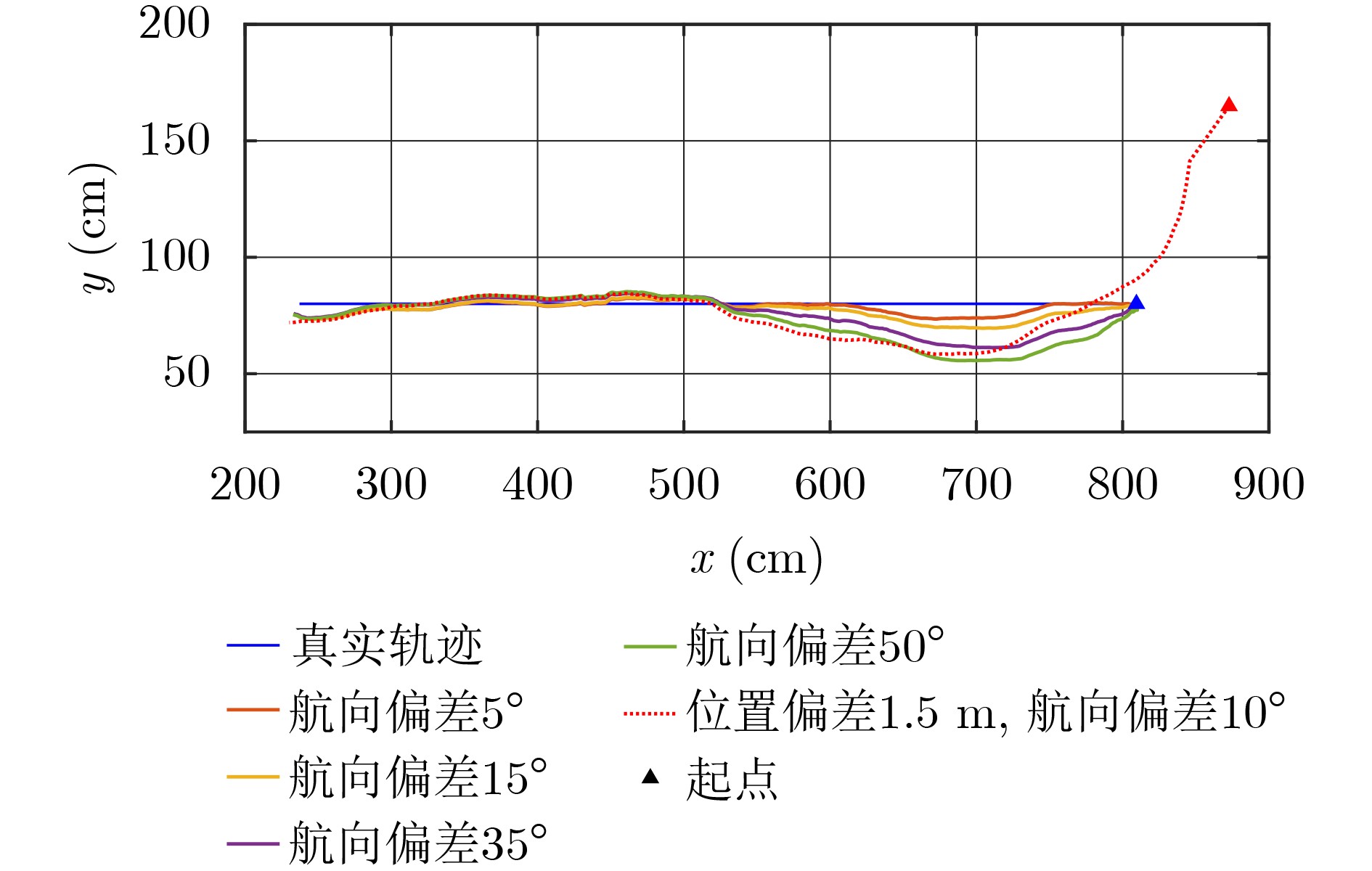
Abstract:Objective Ultra-WideBand (UWB) ranging in confined indoor environments is prone to coarse ranging errors and Gaussian noise, which substantially degrade localization accuracy for both static and dynamic targets, even under Line-of-Sight (LOS) conditions. In addition, during indoor operations of wheeled vehicles, obstacles often obstruct the LOS between onboard UWB tags and anchors, resulting in Non-Line-of-Sight (NLOS) propagation. NLOS-induced interference results in abrupt fluctuations in range measurements, which severely compromise the estimation of the vehicle’s motion state. Methods To address these challenges, this study proposes a Gaussian Process Regression (GPR)-calibrated indoor UWB/Inertial Measurement Unit (IMU) fusion localization algorithm (GIU-EKF). The proposed approach offers two key features. First, a UWB ranging error model for the entire two-dimensional localization area is established by collecting UWB measurements at a limited set of reference points under LOS conditions. This model is applied to correct LOS-related ranging biases. Second, by leveraging the low short-term drift characteristics of inertial measurements, the algorithm fuses IMU and UWB data to mitigate NLOS ranging errors. Results and Discussions Under LOS conditions, a GPR-based error calibration model is constructed by sampling and analyzing UWB ranging deviations at known reference coordinates. This model captures the statistical association between two-dimensional spatial positions and the corresponding ranging errors. For any queried location, the model generates a set of probabilistic range estimates, with the final range value obtained by weighting nearby sample points according to their normalized likelihoods. This enables real-time suppression of LOS-related ranging errors. A threshold-based detection mechanism identifies NLOS conditions when the UWB range increment exceeds a predefined threshold. In NLOS scenarios, a subordinate Extended Kalman Filter (EKF) fuses UWB range data with short-term IMU measurements to compensate for NLOS-induced ranging errors during motion. The corrected range data are then incorporated into a primary EKF to update the vehicle’s motion state estimation. Experimental results demonstrate that the proposed GPR-based coarse error correction reduces localization errors by 64% and 58% for static and dynamic tags under LOS conditions, respectively. In three representative NLOS scenarios, the GIU-EKF algorithm maintains reliable motion state estimation for low-speed targets, achieving an average localization error of 7.5 cm. For tags moving at speeds between 0.2 m/s and 0.8 m/s, localization errors remain below 10 cm. The robustness of the proposed algorithm under extreme conditions is also validated. As shown in Section 4.3.2, the algorithm maintains stable velocity vector estimation even when the wheeled vehicle experiences alternating occlusions between single-anchor and multi-anchor configurations. Under low-speed conditions (2.2 cm/s), the localization error remains as low as 6.7 cm. Section 4.3.3 further verifies the algorithm’s convergence capability under large initial deviations. When subjected to initial heading errors between 5° and 50°, or a combined 1.5 m position offset and 10° heading deviation, the proposed method consistently converges to the true position within a 2-meter travel distance. Conclusions This study presents a GPR-assisted indoor UWB/IMU fusion localization algorithm. By independently suppressing LOS and NLOS ranging errors from four UWB anchors, the proposed approach enhances localization accuracy in complex indoor environments. Under LOS conditions, a GPR-based correction mitigates coarse UWB ranging errors. In NLOS scenarios, short-term inertial estimates compensate for anomalous UWB measurements. A subordinate EKF adaptively balances observation uncertainties from the two sensing modalities, maintaining motion state observability when the tag moves slowly in confined spaces. This design avoids long-term drift accumulation, which is often observed in tightly coupled systems that treat IMU data as a strong prior, particularly when using low-cost inertial sensors. Experimental results demonstrate that the proposed algorithm achieves sub-10 cm localization accuracy under both LOS and NLOS conditions. During low-speed operations, the system maintains convergence of both velocity and position estimates. Furthermore, even with significant initial motion state biases, the algorithm consistently converges to the true trajectory. These findings indicate that the proposed method effectively meets the operational requirements of mobile robots in narrow indoor environments. However, practical application still requires further attention to two key aspects: efficient and autonomous collection of coordinate samples for GPR model training, and integration of real-time localization outputs with vehicle path planning and motion control systems. -
表 1 4个基站高斯模型优化后的核参数和对应的误差函数值
基站 $ {\mathrm{\sigma }}_{\mathrm{l}} $ $ {\sigma }_{\mathrm{f}} $ $ \sigma $ $ \beta $ $ {E}_{\mathrm{r}\mathrm{m}\mathrm{s}\mathrm{e}} $ (cm) A 500 46.49 80 –259.84 6.499 B 600 21.28 63 –143.58 5.217 C 550 24.57 52 –215.22 5.160 D 550 30.79 78 –217.79 4.863  下载: 导出CSV
下载: 导出CSV
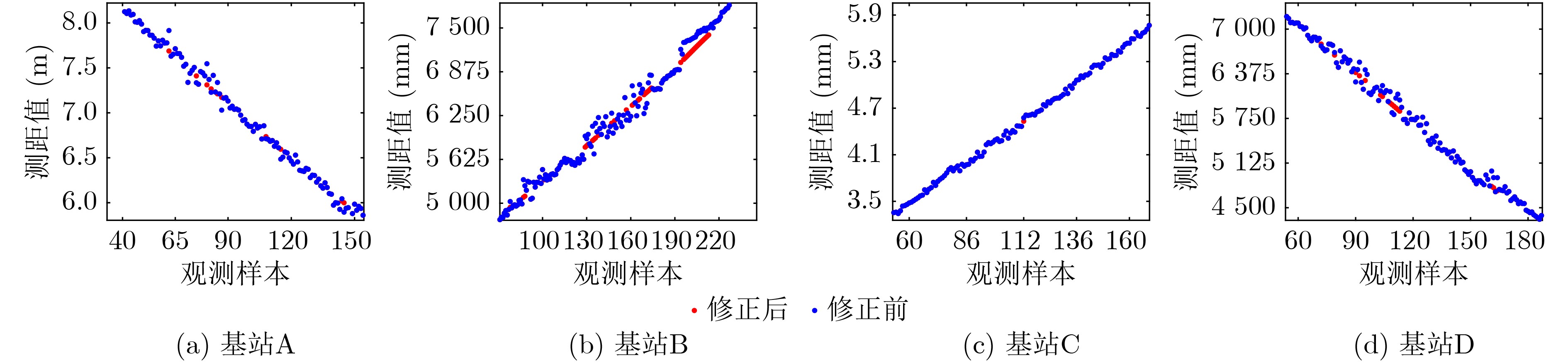
表 2 各基站修正前后测距误差RMS(cm)
基站编号 轨道1 轨道2 轨道3 轨道4 修正前/后 下降(%) 修正前/后 下降(%) 修正前/后 下降(%) 修正前/后 下降(%) A 25.0/5.8 77 26.3/4.6 83 33.6/5.7 83 21.3/10.5 51 B 16.7/12.1 28 12.8/10.3 20 22.4/10.6 53 15.5/3.8 75 C 23.6/3.2 86 20.2/3.2 84 16.5/13.1 21 17.1/5.8 66 D 22.8/7.1 69 26.4/5.9 78 23.1/3.8 84 26.2/4.2 84
下载: 导出CSV
表 3 4条轨道定位误差RMS(cm)
轨道编号 LS EKF 修正前/后 下降(%) 修正前/后 下降(%) 1 33.8/17.5 48 27.8/12.1 56 2 30.4/15.4 49 28.6/7.7 73 3 44.0/31.2 29 16.9/11.1 34 4 16.4/5.0 70 18.9/5.8 69 误差均值 29.3/14.3 - 22.4/8.8 -
下载: 导出CSV
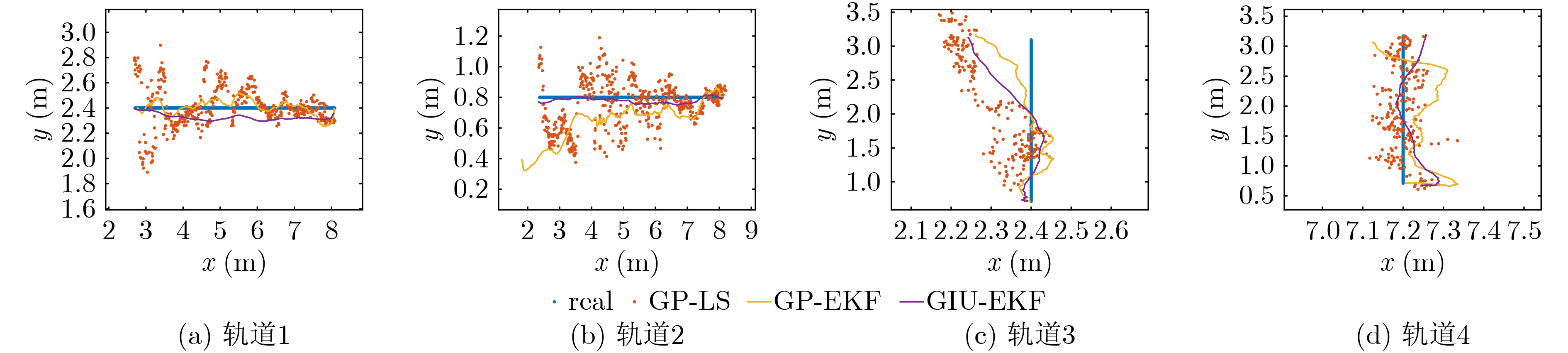
表 4 NLOS环境4条轨道3种定位算法定位误差RMS(cm)
轨道编号 GP-LS GP-EKF GIU-EKF 1 16.8 10.8 9.8 2 17.2 28.9 5.4 3 34.6 8.1 8.2 4 7.4 9.6 6.9
下载: 导出CSV
-
[1] ZARE M, BATTULWAR R, SEAMONS J, et al. Applications of wireless indoor positioning systems and technologies in underground mining: A review[J]. Mining, Metallurgy & Exploration, 2021, 38(6): 2307–2322. doi: 10.1007/s42461-021-00476-x. [2] 闫大禹, 宋伟, 王旭丹, 等. 国内室内定位技术发展现状综述[J]. 导航定位学报, 2019, 7(4): 5–12. doi: 10.3969/j.issn.2095-4999.2019.04.002.YAN Dayu, SONG Wei, WANG Xudan, et al. Review of development status of indoor location technology in China[J]. Journal of Navigation and Positioning, 2019, 7(4): 5–12. doi: 10.3969/j.issn.2095-4999.2019.04.002. [3] DESPAUX F, VAN DEN BOSSCHE A, JAFFRÈS-RUNSER K, et al. N-TWR: An accurate time-of-flight-based N-ary ranging protocol for Ultra-Wide band[J]. Ad Hoc Networks, 2018, 79: 1–19. doi: 10.1016/j.adhoc.2018.05.016. [4] FENG Daquan, WANG Chunqi, HE Chunlong, et al. Kalman-filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation[J]. IEEE Internet of Things Journal, 2020, 7(4): 3133–3146. doi: 10.1109/JIOT.2020.2965115. [5] ROSS A and JOUFFROY J. Remarks on the observability of single beacon underwater navigation[C]. International Symposium on Unmanned Untethered Submersible Technology, Durham, USA, 2005. [6] LI Jianan, NING Zian, HE Shaoming, et al. Three-dimensional bearing-only target following via observability-enhanced helical guidance[J]. IEEE Transactions on Robotics, 2023, 39(2): 1509–1526. doi: 10.1109/TRO.2022.3218268. [7] NING Zian, ZHANG Yin, LI Jianan, et al. A bearing-angle approach for unknown target motion analysis based on visual measurements[J]. The International Journal of Robotics Research, 2024, 43(8): 1228–1249. doi: 10.1177/02783649241229172. [8] LEE S H and SEO D H. Scalable Wi-Fi fingerprinting localization by deep similarity network[J]. IEEE Internet of Things Journal, 2025, 12(4): 4197–4206. doi: 10.1109/JIOT.2024.3484456. [9] BROSSARD M, BARRAU A, and BONNABEL S. AI-IMU dead-reckoning[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(4): 585–595. doi: 10.1109/TIV.2020.2980758. [10] DECAWAVE. Sources of error in DW1000 based two-way ranging (TWR) schemes[EB/OL]. https://www.qorvo.com/products/d/da008446, 2024. [11] 肖庭杨, 章迪. 基于BP神经网络的厘米级超宽带测距误差改正模型设计与实验[J]. 全球定位系统, 2021, 46(4): 52–58. doi: 10.12265/j.gnss.2021032901.XIAO Tingyang and ZHANG Di. Design and experiment of centimeter UWB ranging error correction model based on BP neural network[J]. GNSS World of China, 2021, 46(4): 52–58. doi: 10.12265/j.gnss.2021032901. [12] DONG Mengyao, QI Yihong, WANG Xianbin, et al. A non-line-of-sight mitigation method for indoor ultra-wideband localization with multiple walls[J]. IEEE Transactions on Industrial Informatics, 2023, 19(7): 8183–8195. doi: 10.1109/TII.2022.3217533. [13] ZHOU Boli, FANG Hongbin, and XU Jian. UWB-IMU-odometer fusion localization scheme: Observability analysis and experiments[J]. IEEE Sensors Journal, 2023, 23(3): 2550–2564. doi: 10.1109/JSEN.2022.3228296. [14] CAO Yanjun, YANG Chenhao, LI Rui, et al. Accurate position tracking with a single UWB anchor[C]. 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 2020: 2344–2350. doi: 10.1109/ICRA40945.2020.9197345. [15] LIU Jiageng and GUO Ge. Vehicle localization during GPS outages with extended Kalman filter and deep learning[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 7503410. doi: 10.1109/TIM.2021.3097401. [16] 胡文龙, 周宇飞, 宋全军, 等. 基于UWB和IMU信息融合的室内定位算法研究[J]. 制造业自动化, 2023, 45(2): 193–197,213. doi: 10.3969/j.issn.1009-0134.2023.02.039.HU Wenlong, ZHOU Yufei, SONG Quanjun, et al. Research on indoor localization algorithm based on UWB and IMU information fusion[J]. Manufacturing Automation, 2023, 45(2): 193–197,213. doi: 10.3969/j.issn.1009-0134.2023.02.039. [17] SI Minghao, WANG Yunjia, SEOW C K, et al. An adaptive weighted Wi-Fi FTM-based positioning method in an NLOS environment[J]. IEEE Sensors Journal, 2022, 22(1): 472–480. doi: 10.1109/JSEN.2021.3124275. [18] JUÁREZ A, FORTES S, COLIN E, et al. UWB-based positioning system for indoor sports[C]. 2023 13th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nuremberg, Germany, 2023: 1–6. doi: 10.1109/IPIN57070.2023.10332477. -

 下载:
下载:





图(11) / 表(5)
计量
- 文章访问数: 472
- HTML全文浏览量: 305
- PDF下载量: 32
- 被引次数: 0
