

Research on Channel Modeling for Aerial Reconfigurable Intelligent Surfaces-assisted Vehicle Communications
-
摘要: 可重构智能表面(RIS)能够调控入射电磁波以优化通信系统性能,是第6代(6G)无线通信技术的关键创新。将可重构智能表面部署于无人机(UAV)上,借助无人机的灵活运动轨迹和按需部署特性,可以有效解决因树木和建筑等障碍物遮挡所引起的信息传输效率下降的问题。针对空中可重构智能表面辅助的车对车(V2V)通信场景,该文提出了一种基于几何的3维信道模型,该模型综合考虑了无人机在3个自由度下的旋转和任意轨迹移动,以及无人姿态变化对于信道模型的影响,引入了时变空间相位。此外,还考虑了发射端、接收端和无人机的实时运动速度和方向,给出了复信道脉冲响应(CIRs)的表达式,并对空域互相关函数(CCFs)、时域自相关函数(ACFs)和信道容量等关键信道统计特性进行了详细分析。仿真结果表明,所提信道模型能够准确捕获信道特性,为未来可重构智能面辅助无线通信的系统设计和优化提供了有价值的理论参考。Abstract:
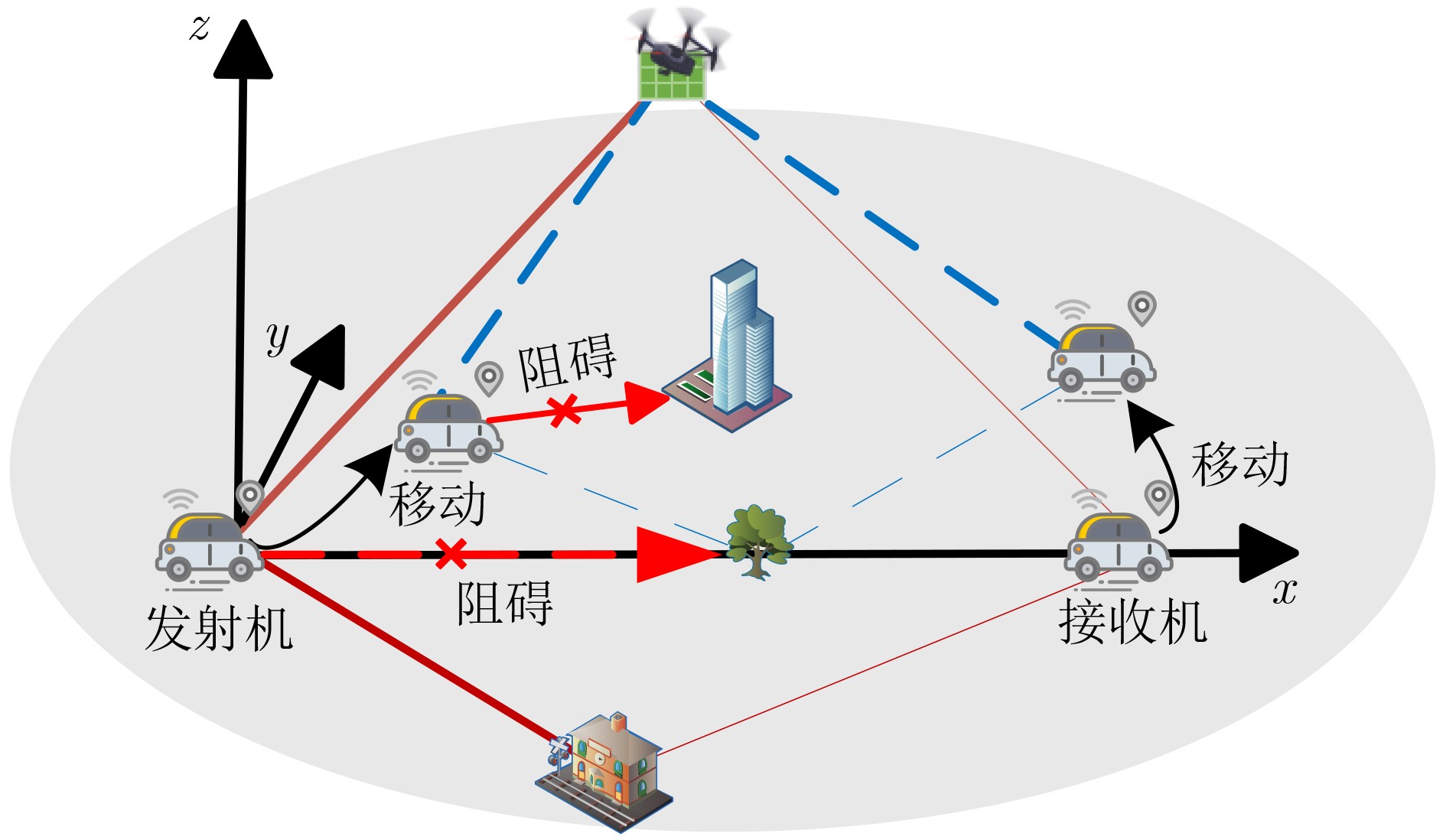
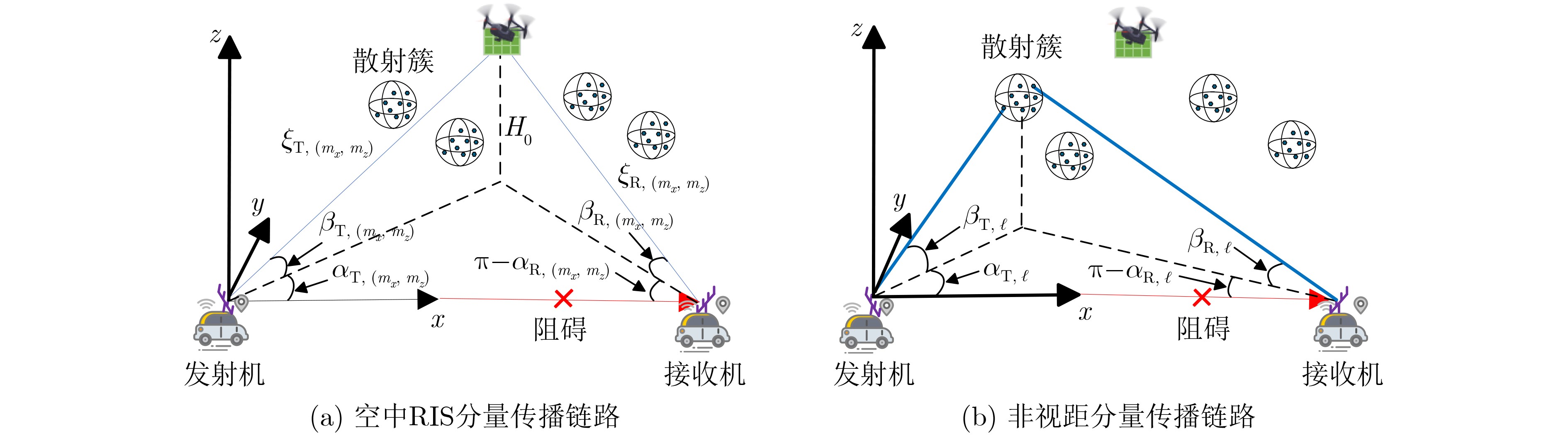
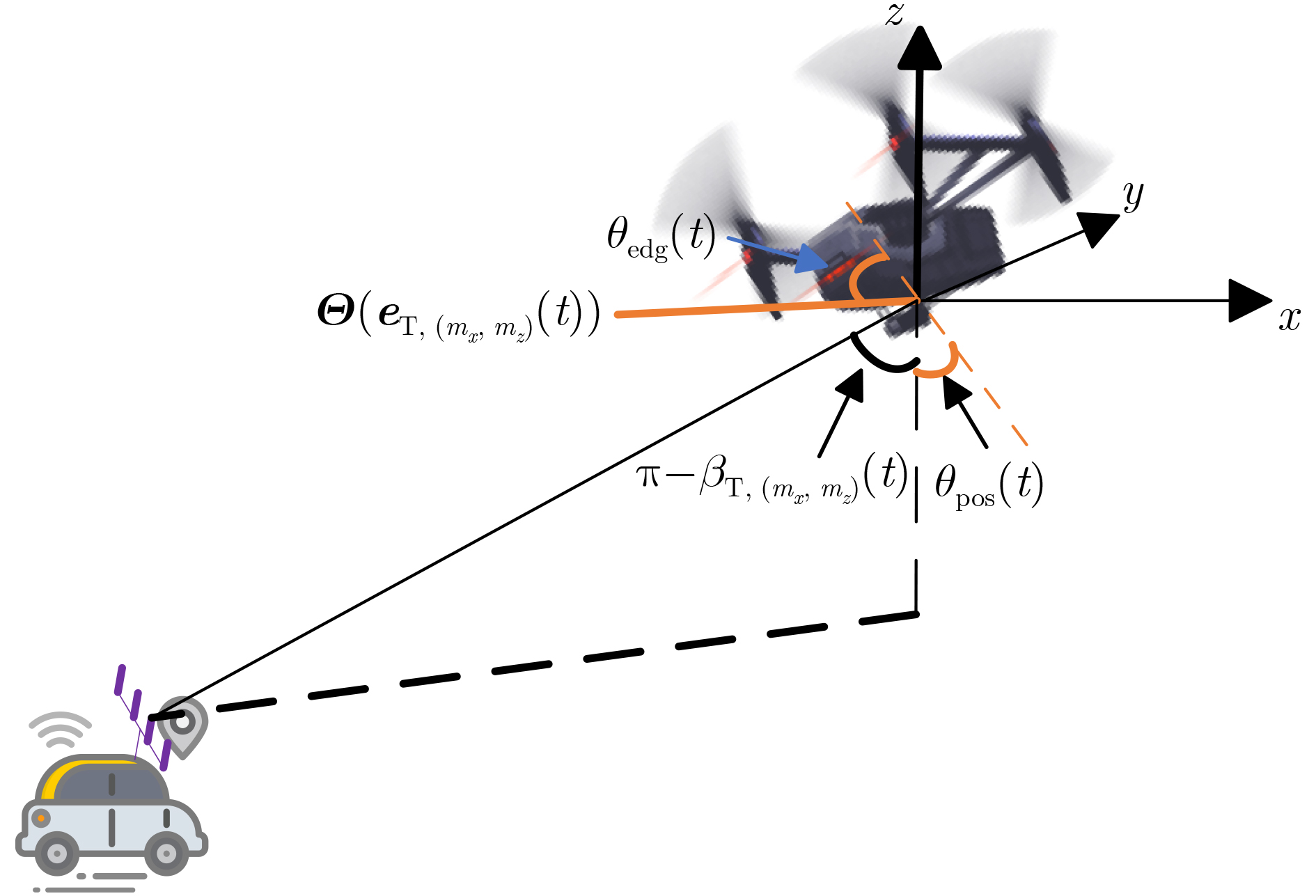
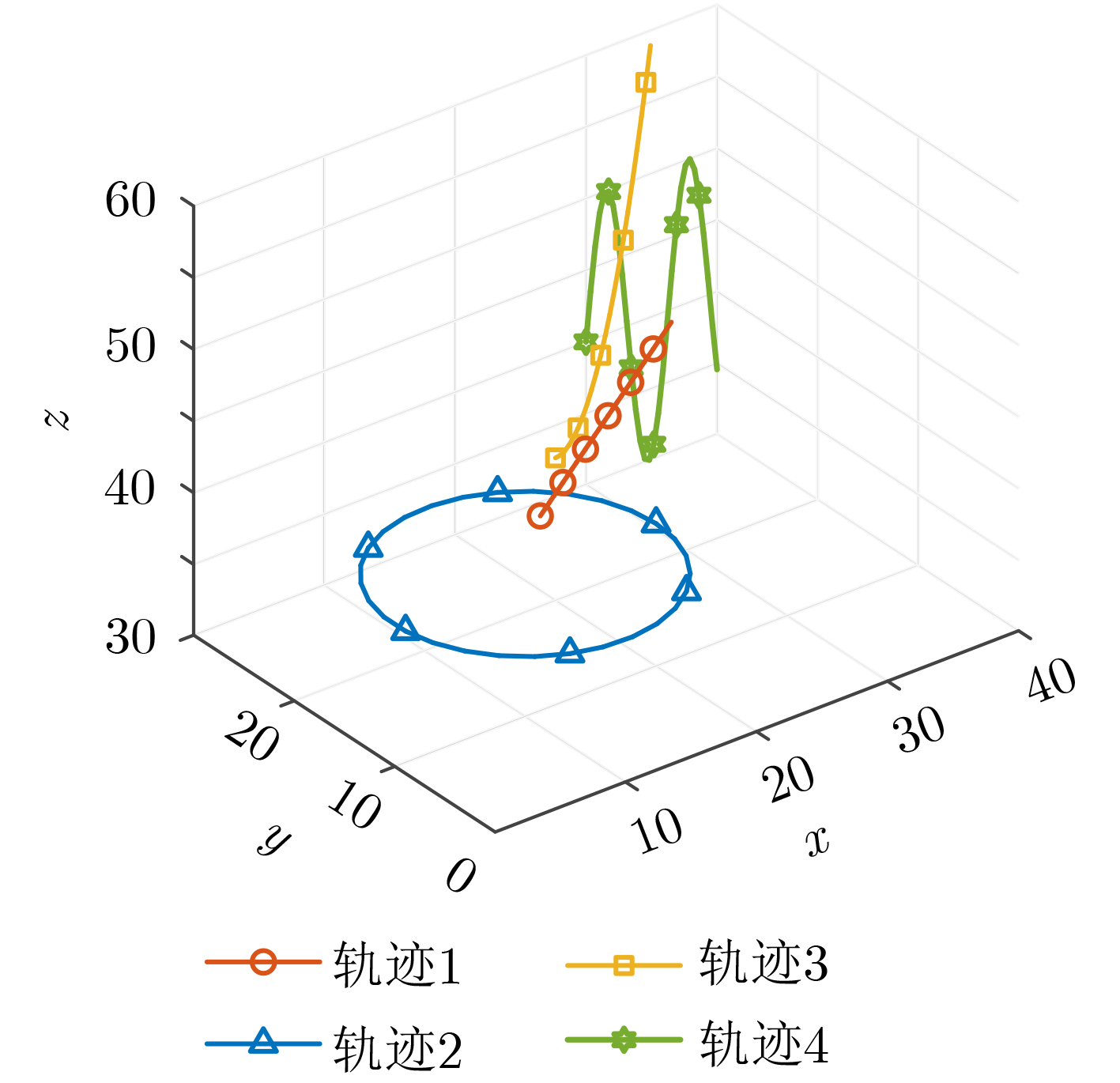
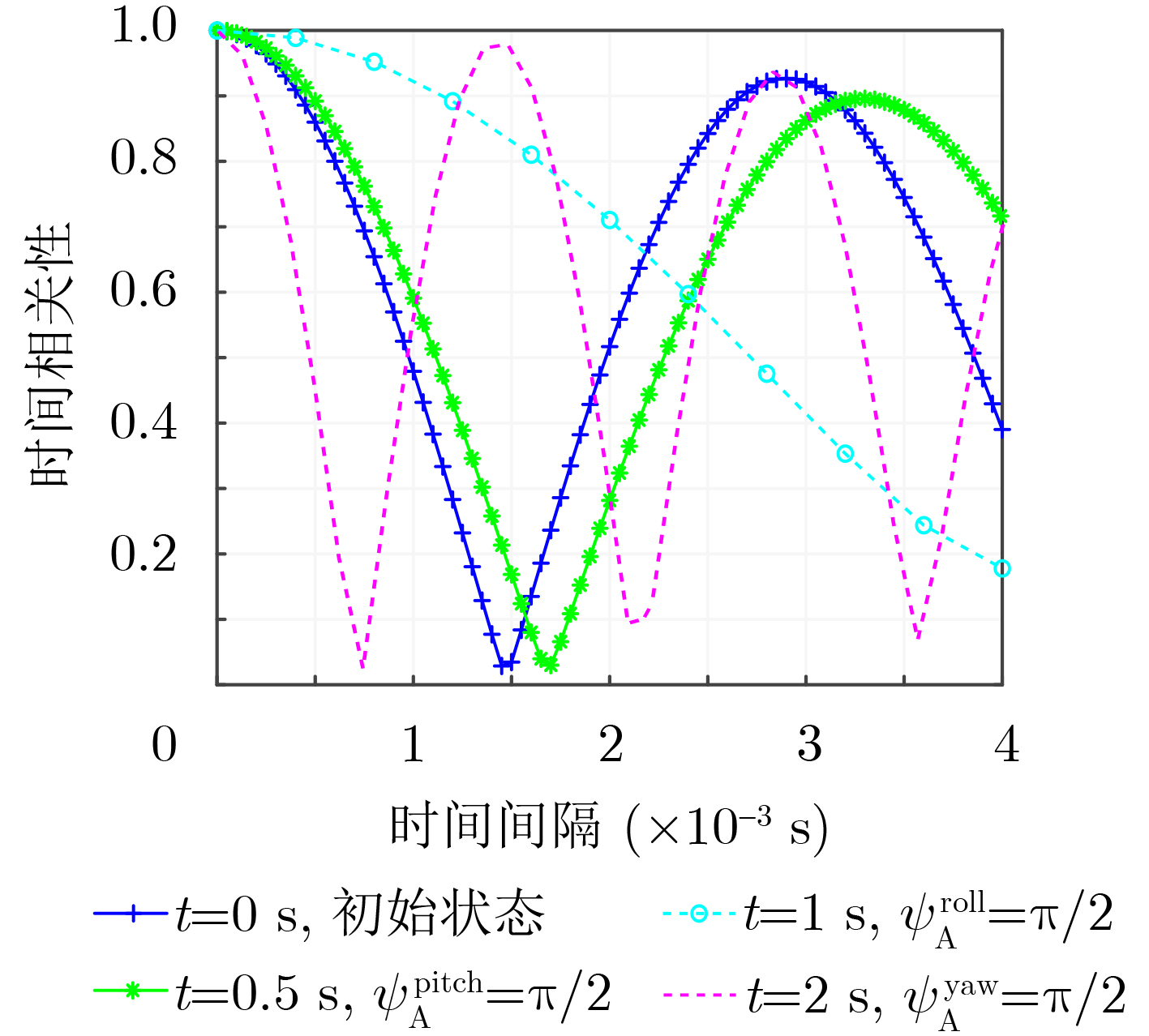
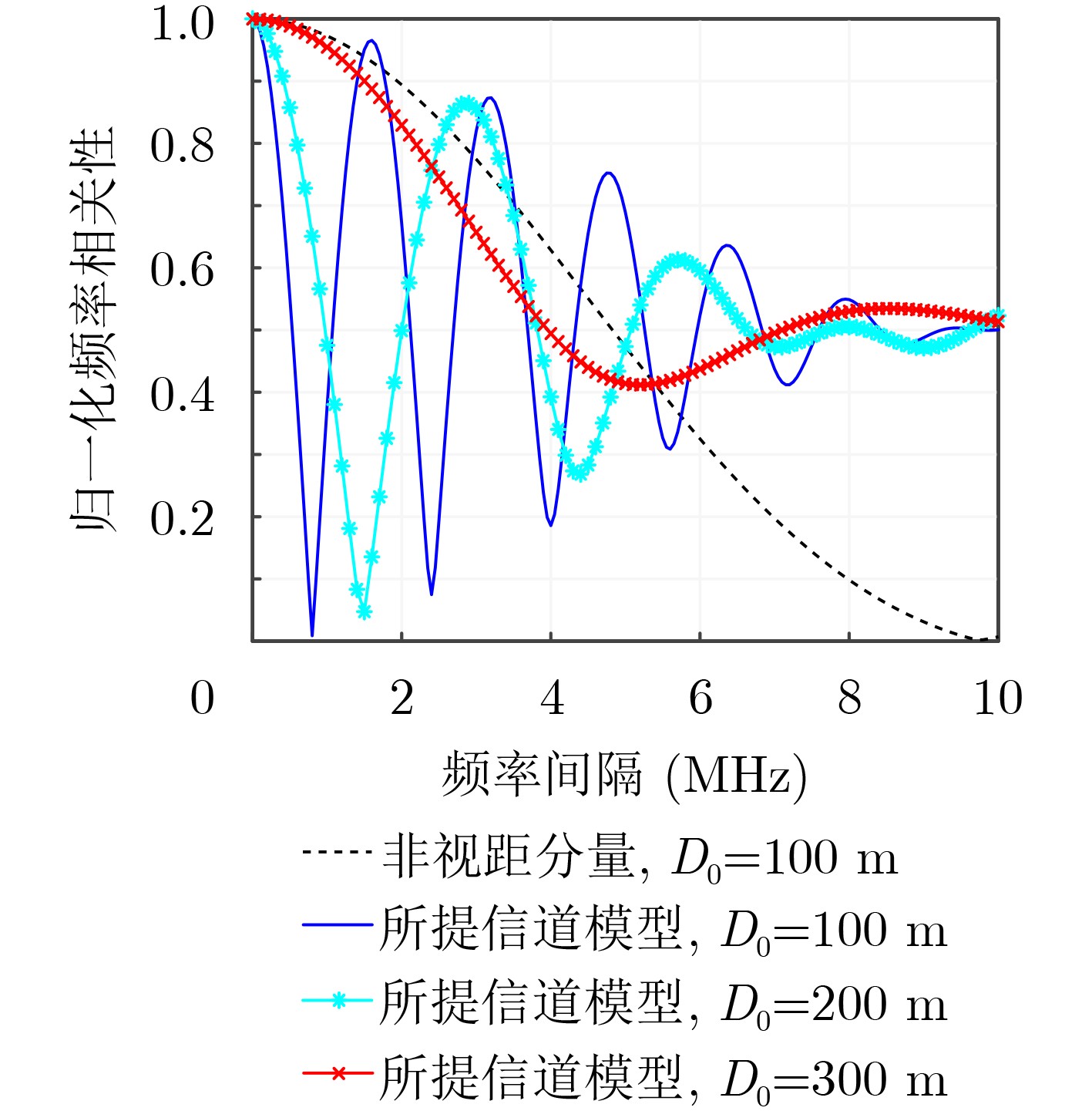
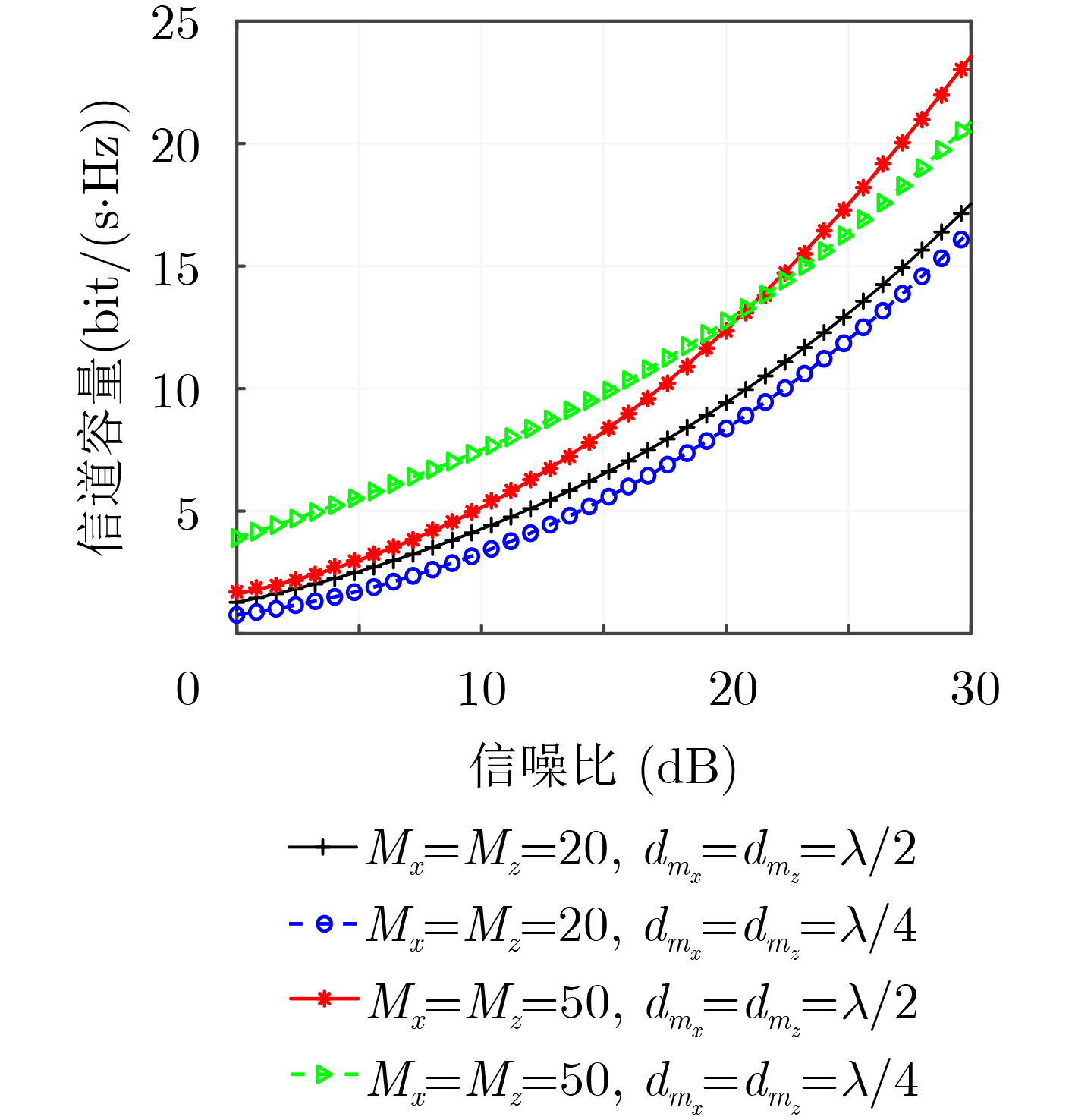
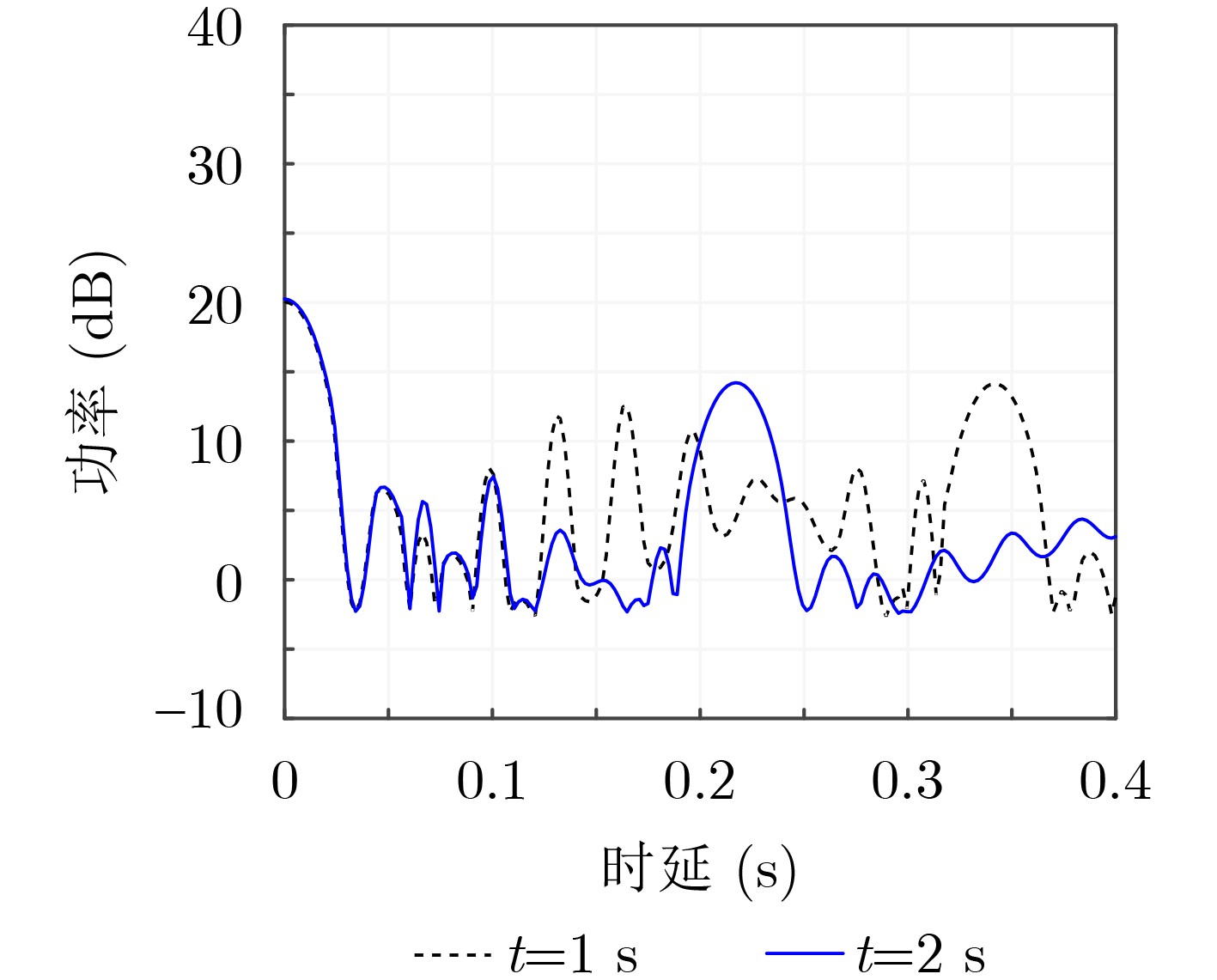
Objective The Internet of Vehicles (IoV) is a global innovation focus, enabling ubiquitous interconnection among vehicles, roads, and people, thereby reducing traffic congestion and improving traffic safety. Vehicle-to-Vehicle (V2V) communication represents one of the most prominent application scenarios in IoV. This study addresses the reduced efficiency of V2V communication caused by environmental obstacles such as buildings and trees. It proposes the deployment of Reconfigurable Intelligent Surfaces (RIS) on Unmanned Aerial Vehicles (UAVs), leveraging their high mobility and on-demand deployment capability to enhance V2V communication under 6G networks. The model improves communication link quality and stability by utilizing the reflective properties of aerial RIS to mitigate signal attenuation and interference. This research develops a geometry-based Three-Dimensional (3D) dynamic channel model that incorporates the effects of UAV rotation, trajectory movement, and attitude changes on channel characteristics, enabling adaptation to dynamic and non-stationary communication scenarios. The findings provide a theoretical foundation for designing and optimizing RIS-assisted wireless communication systems through statistical analyses in the temporal, spatial, and frequency domains. Methods RIS can regulate incident electromagnetic waves to optimize communication system performance and are regarded as a crucial innovation in Sixth Generation (6G) wireless communication technology. Deploying RIS on UAVs effectively addresses reduced information transmission efficiency caused by obstacles such as trees and buildings, leveraging UAVs’ flexible trajectories and on-demand deployment capabilities. This study proposes a geometry-based 3D dynamic channel model, considering the UAV’s trajectory, three degrees of rotational freedom (pitch, yaw, and roll angles), and attitude changes. Channel propagation components are divided into aerial RIS array components and Non-Line-of-Sight (NLoS) components. Each RIS unit is modeled as an independent reflector capable of altering the propagation path by adjusting its phase and amplitude. The model incorporates time-varying spatial phases and Doppler frequency shifts, capturing the characteristics of dynamic propagation environments. Mathematical expressions for the Complex Impulse Responses (CIRs) are derived, along with analytical formulas for spatial Cross-Correlation Functions (CCFs), temporal Auto-Correlation Functions (ACFs), Frequency Correlation Functions (FCFs), and channel capacity. Various V2V communication scenarios are simulated by adjusting the velocity, direction, and acceleration of transmitters, receivers, and UAVs. Numerical simulations validate the proposed model’s effectiveness by defining four UAV trajectories and various vehicle motion states. Additionally, the temporal, spatial, and frequency correlation characteristics under different motion states are investigated. Finally, the effects of RIS physical attributes, such as the number and size of units, and UAV altitude on channel capacity are analyzed, along with dynamic variations in the power delay profile. Results and Discussions Simulation results demonstrate that the proposed channel model accurately captures channel characteristics. Specifically, the model presents various UAV flight trajectories ( Fig. 5 ) and analyzes the temporal autocorrelation properties under different motion states of the transmitter and receiver (Fig. 6 ). It is observed that the temporal correlation exhibits significant non-stationarity across different motion states. However, the introduction of RIS significantly mitigates the decline in correlation. The model also compares the temporal autocorrelation properties corresponding to different UAV flight attitudes and altitudes (Fig. 7 ,Fig. 9 ). It is found that as the UAV’s initial altitude increases, multipath effects decrease, and the rate of decline in temporal autocorrelation function values gradually slows. Subsequently, the spatial cross-correlation of the proposed channel model is investigated for different propagation paths, revealing an increase in correlation with the Rician factor (Fig. 8 ). The frequency correlation function values are also examined under varying distances between the transmitter and receiver (Fig. 10 ), showing that while the correlation declines, it gradually stabilizes as the frequency interval increases. Finally, the impact of the RIS’s physical properties on channel capacity and the power delay profile is studied (Fig. 11 ,Fig. 12 ). It is observed that increasing the size and number of RIS array elements enhances channel capacity. Additionally, as delay increases, the power exhibits multiple smaller peaks before gradually decaying. These findings provide a valuable theoretical foundation for the future design and optimization of RIS-assisted wireless communication systems.Conclusions This paper presents a geometry-based 3D non-stationary channel model for V2V communications, innovatively incorporating aerial RIS implemented by UAVs equipped with RIS. The model accounts for the time-varying motion trajectories of ground vehicle terminals and UAVs, as well as the fading effects due to UAV attitude variations. Analytical expressions for spatiotemporal-frequency correlation functions and channel capacity are derived from the proposed model, ensuring the accuracy of channel transmission characteristics. By adjusting the model’s parameter configurations, it can accurately characterize the effects of various motion trajectories, dynamic states, UAV flight altitudes, and rotational angles on channel properties. These findings provide valuable insights for the design and performance analysis of RIS-assisted V2V communication systems. -
[1] YOU Xiaohu, WANG Chengxiang, HUANG Jie, et al. Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts[J]. Science China Information Sciences, 2021, 64(1): 110301. doi: 10.1007/s11432-020-2955-6. [2] JIANG Hao, XIONG Baiping, ZHANG Hongming, et al. Physics-based 3D end-to-end modeling for double-RIS assisted non-stationary UAV-to-ground communication channels[J]. IEEE Transactions on Communications, 2023, 71(7): 4247–4261. doi: 10.1109/TCOMM.2023.3266832. [3] JIANG Hao, MUKHERJEE M, ZHOU Jie, et al. Channel modeling and characteristics for 6G wireless communications[J]. IEEE Network, 2021, 35(1): 296–303. doi: 10.1109/MNET.011.2000348. [4] HUA Boyu, NI Haoran, ZHU Qiuming, et al. Channel modeling for UAV-to-ground communications with posture variation and fuselage scattering effect[J]. IEEE Transactions on Communications, 2023, 71(5): 3103–3116. doi: 10.1109/TCOMM.2023.3255900. [5] JIANG Hao, YING Wen, ZHOU Jie, et al. A 3D wideband two-cluster channel model for massive MIMO Vehicle-to-vehicle communications in semi-ellipsoid environments[J]. IEEE Access, 2020, 8: 23594–23600. doi: 10.1109/ACCESS.2020.2970190. [6] SUN Guiqi, HE Ruisi, MA Zhangfeng, et al. A 3D geometry-based non-dtationary MIMO channel model for RIS-assisted communications[C]. 2021 IEEE 94th Vehicular Technology Conference, Norman, OK, USA, 2021: 1–5. doi: 10.1109/VTC2021-Fall52928.2021.9625374. [7] XIONG Baiping, ZHANG Zaichen, JIANG Hao, et al. A 3D non-stationary MIMO channel model for reconfigurable intelligent surface auxiliary UAV-to-ground mmWave communications[J]. IEEE Transactions on Wireless Communications, 2022, 21(7): 5658–5672. doi: 10.1109/TWC.2022.3142437. [8] 张在琛, 江浩. 智能超表面使能无人机高能效通信信道建模与传输机理分析[J]. 电子学报, 2023, 51(10): 2623–2634. doi: 10.12263/DZXB.20221352.ZHANG Zaichen and JIANG Hao. Channel modeling and characteristics analysis for high energy-efficient RIS-assisted UAV communications[J]. Acta Electronica Sinica, 2023, 51(10): 2623–2634. doi: 10.12263/DZXB.20221352. [9] MA Zhangfeng, AI Bo, HE Ruisi, et al. A non-stationary geometry-based MIMO channel model for millimeter-wave UAV networks[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(10): 2960–2974. doi: 10.1109/JSAC.2021.3088659. [10] JIANG Hao, RUAN Chengyao, ZHANG Zaichen, et al. A general wideband non-stationary stochastic channel model for intelligent reflecting surface-assisted MIMO communications[J]. IEEE Transactions on Wireless Communications, 2021, 20(8): 5314–5328. doi: 10.1109/TWC.2021.3066806. [11] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789.CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics & Information Technology, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789. [12] LIU Shaoyi, MA Nan, CHEN Yaning, et al. A wideband MIMO channel model for aerial intelligent reflecting surface-assisted wireless communications[C]. 2023 IEEE Globecom Workshops (GC Wkshps), Kuala Lumpur, Malaysia, 2023: 1487–1492. doi: 10.1109/GCWkshps58843.2023.10464958. [13] XIONG Baiping, ZHANG Zaichen, JIANG Hao, et al. A statistical MIMO channel model for reconfigurable intelligent surface assisted wireless communications[J]. IEEE Transactions on Communications, 2022, 70(2): 1360–1375. doi: 10.1109/TCOMM.2021.3129926. [14] XIONG Baiping, ZHANG Zaichen, PAN Cunhua, et al. Performance analysis of aerial RIS auxiliary mmWave mobile communications with UAV fluctuation[J]. IEEE Wireless Communications Letters, 2024, 13(4): 1183–1187. doi: 10.1109/LWC.2024.3364831. [15] CHANG Hengtai, WANG Chengxiang, LIU Yu, et al. A novel nonstationary 6G UAV-to-ground wireless channel model with 3-D arbitrary trajectory changes[J]. IEEE Internet of Things Journal, 2021, 8(12): 9865–9877. doi: 10.1109/JIOT.2020.3018479. [16] SHI Wangqi, JIANG Hao, XIONG Baiping, et al. RIS-empowered V2V communications: Three-dimensional beam domain channel modeling and analysis[J]. IEEE Transactions on Wireless Communications, 2024, 23(11): 15844–15857. doi: 10.1109/TWC.2024.3434568. -

 下载:
下载:






图(12)
计量
- 文章访问数: 1113
- HTML全文浏览量: 737
- PDF下载量: 125
- 被引次数: 0
