

Hybrid Reconfigurable Intelligent Surface Assisted Sensing Communication and Computation for Joint Power and Time Allocation in Vehicle Ad-hoc Network
-
摘要: 当前车联网(V2X)环境普遍存在频谱资源紧缺和数据传输效率低的问题。该文通过集成感知、通信和计算车联网系统(ISCC-V2X)以提升车辆用户的数据传输能力。ISCC-V2X中采用雷达感知技术帮助次用户接入主用户频谱空洞进行车联网通信,在车辆用户中加入计算单元提升数据传输卸载能力,为了更好地提升车联网通信和计算性能并同时降低系统功耗,在ISCC-V2X中引入混合智能反射面(H-RIS)。该研究从时间和功率资源分配的角度出发,对H-RIS辅助的ISCC-V2X技术进行了深入探讨。该文采用了一种两阶段的优化方法,对功率分配、时间分配和反射元件进行交替优化求解,以找到最佳的优化方案,并通过定义联合吞吐量(JTC)的性能指标来表征次用户的数据传输能力和计算性能。通过仿真实验分析表明,在H-RIS辅助ISCC-V2X场景中存在一种时间功率联合分配的最优策略,能够显著提升次用户的联合吞吐量。Abstract:
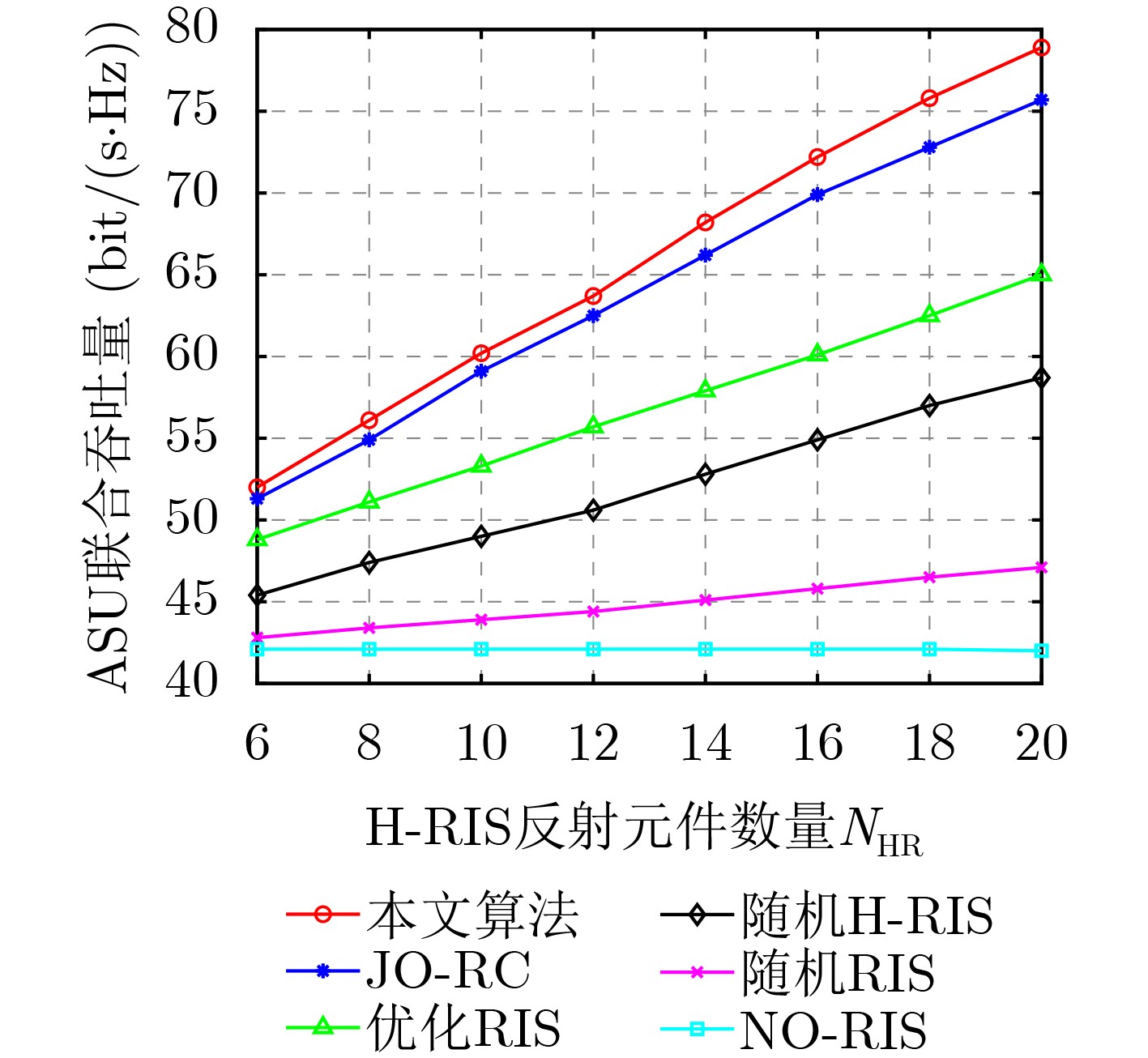
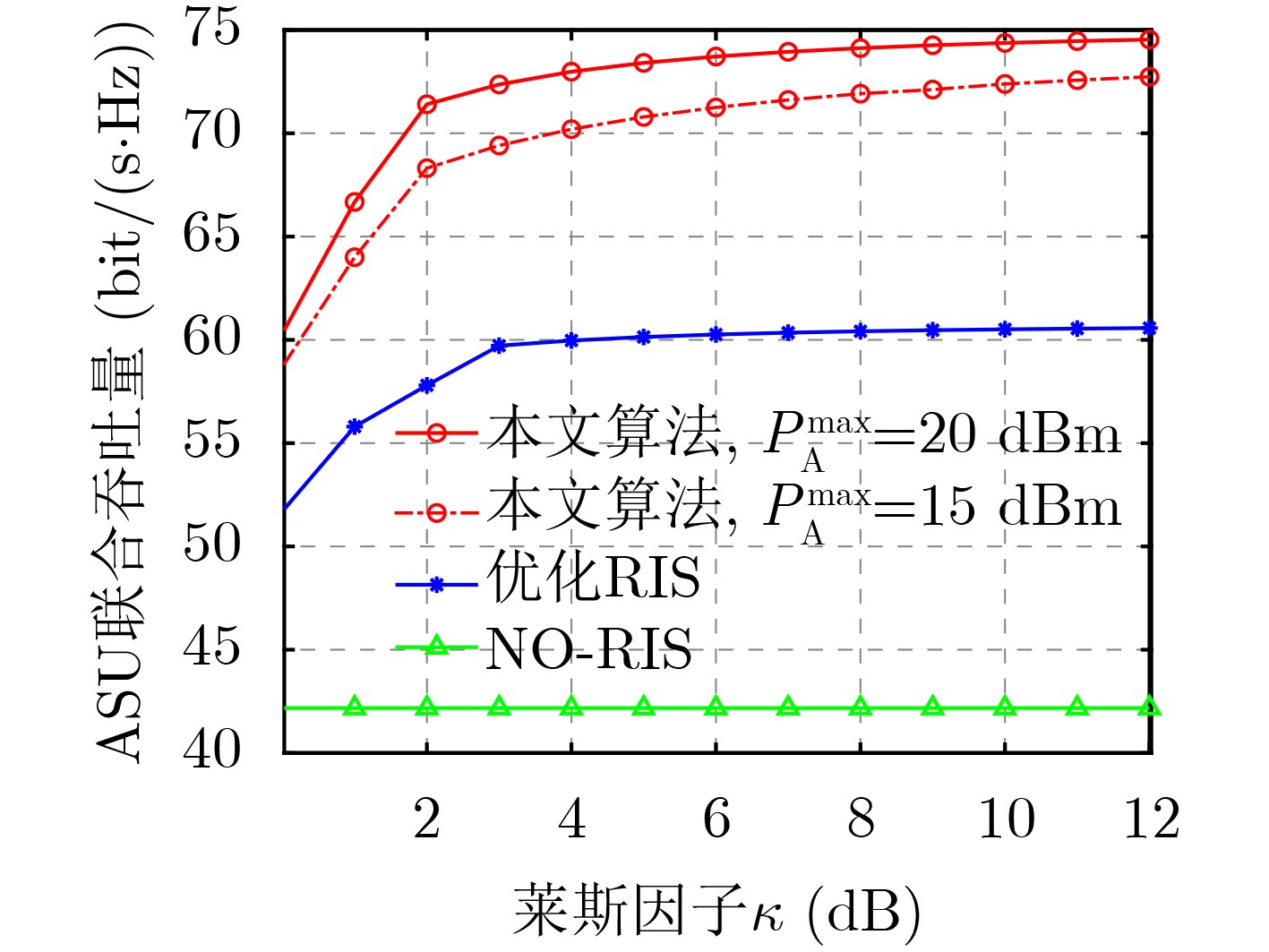
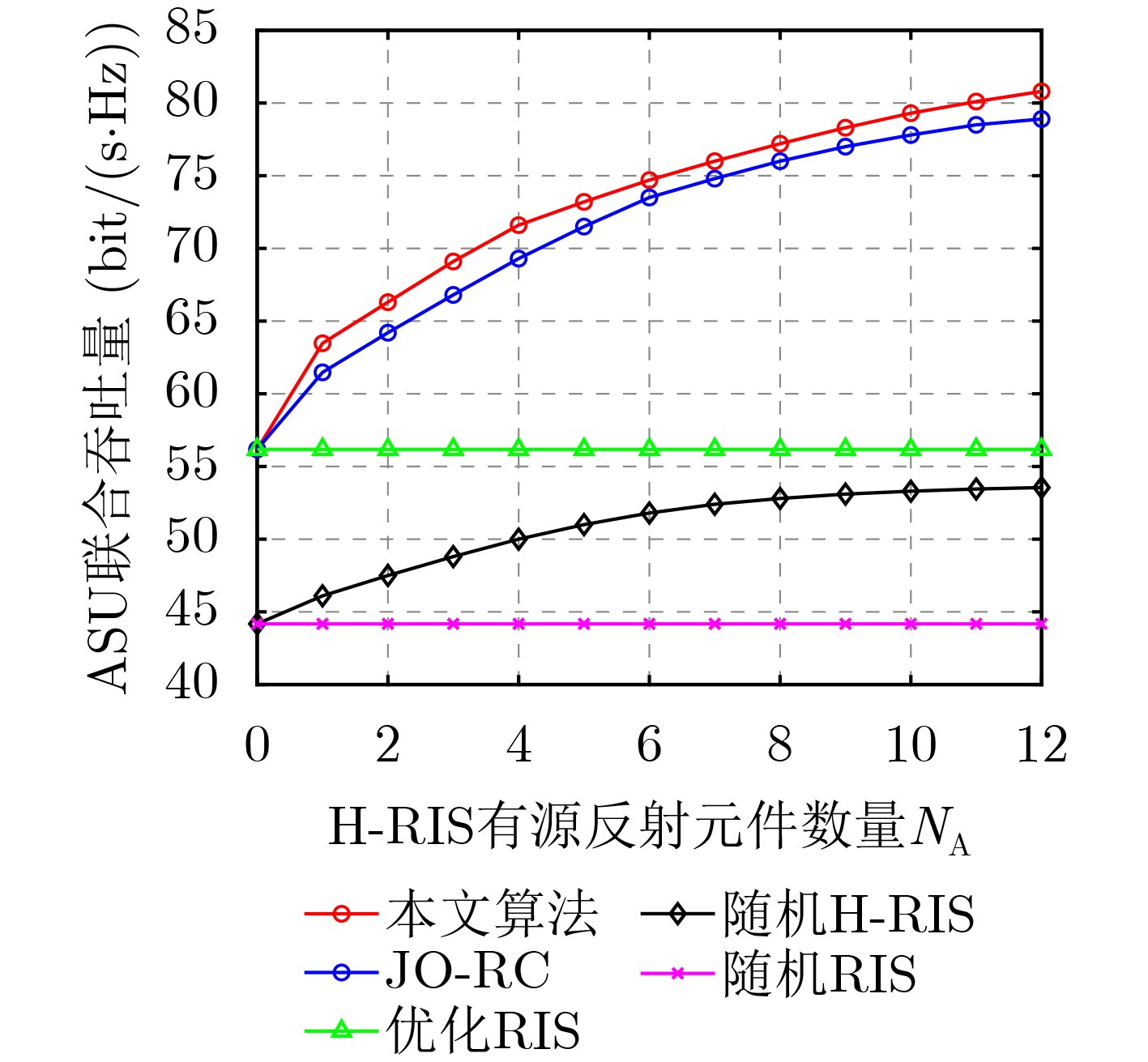
Objective Vehicular networks, as key components of intelligent transportation systems, are encountering increasing spectrum resource limitations within their dedicated 25 MHz communication band, as well as challenges from electromagnetic interference in typical communication environments. To address these issues, this paper integrates cognitive radio technology with radar sensing and introduces Hybrid-Reconfigurable Intelligent Surface (H-RIS) to jointly optimize radar sensing, data transmission, and computation. This approach aims to enhance spectrum resource utilization and the Joint Throughput Capacity (JTC) of vehicular networks. Methods A phased optimization approach is adopted to alternately optimize power allocation, time allocation, and reflection components in order to identify the best solution. The data transmission capacity of secondary users is characterized by defining a performance index for JTP. The problem is tackled through a two-stage optimization strategy where power allocation, time allocation, and reflection element optimization are solved iteratively to achieve the optimal solution. First, a joint optimization problem for sensing, communication, and computation is formulated. By jointly optimizing time allocation, H-RIS reflection element coefficients, and power allocation, the goal is to maximize the joint throughput capacity. The block coordinate descent method decomposes the optimization problem into three sub-problems. In the optimization of reflection element coefficients, a stepwise approach is employed, where passive reflection elements are fixed to optimize active reflection elements and vice versa. Results and Discussions The relationship between joint throughput and the number of iterations for the proposed Alternating Optimization Iterative Algorithm (AOIA) is shown ( Figure 4 ). The results indicate that both algorithms converge after a finite number of iterations. The correlation between the target secondary user’s joint throughput and radar power is presented (Figure 5 ). In the H-RIS-assisted Integrated Sensing Communication and Computation Vehicle-to-Everything (ISCC-V2X) scenario, the joint throughput of the Aimed Secondary User (ASU) is maximized through optimal power configuration (Figure 5 ). The comparison of the target secondary user’s joint throughput with radar system power for the proposed algorithm and baseline schemes is shown (Figure 6 ), demonstrating that the proposed method significantly outperforms random Reconfigurable Intelligent Surfaces (RIS) and No-RIS schemes under the same parameter settings. Furthermore, the proposed H-RIS optimization scheme outperforms both Random H-RIS and traditional passive optimization RIS in terms of joint throughput.The relationship between the target secondary user’s joint throughput and the number of H-RIS reflection elements is illustrated (Figure 7 ). The results show that the proposed scheme provides a significant performance improvement over both Random RIS and No-RIS schemes under the same parameter settings. The relationship between the transmit power of the target secondary user’s joint throughput and the transmit power of the ASU is depicted (Figure 9 ), highlighting that joint throughput increases with transmit power in all scenarios. The relationship between joint throughput and the number of active reflection elements for the proposed algorithm and other benchmark schemes is shown (Figure 10 ), demonstrating that joint throughput increases with the number of active reflection elements in H-RIS scenarios, with the proposed scheme exhibiting a faster growth rate than Random H-RIS. The relationship between ASU joint throughput, radar sensing time, and radar power is presented (Figure 11 ), revealing that an optimal joint time and power allocation strategy exists. This strategy maximizes ASU joint throughput while ensuring H-RIS presence and sufficient protection for the primary user.Conclusion To address the challenges of spectrum resource scarcity and low data transmission efficiency in vehicular networks, this paper focuses on improving the joint throughput of intelligent vehicle users, enhancing spectrum utilization, and achieving efficient data transmission in the H-RIS-assisted ISCC-V2X scenario. A joint optimization method for vehicular network perception, communication, and computation based on H-RIS is explored. The introduction of H-RIS aims to enhance data transmission efficiency while considering the interests of both primary and secondary users. The joint optimization problem for the target secondary user’s perception, communication, and computation is analyzed. First, the joint allocation scenario for the H-RIS-assisted ISCC-V2X system is constructed, introducing the signal model, radar perception model, communication model, and computation model. Using these models, a joint optimization problem is formulated. Through alternating optimization, the optimal H-RIS reflection element coefficients, time allocation vector, and power allocation vector are derived to maximize the joint throughput. Simulation results demonstrate that the incorporation of H-RIS significantly improves the joint throughput of the target secondary user. Furthermore, an optimal power allocation scheme is identified that maximizes the joint throughput. When both time allocation and power allocation are considered jointly, simulations show the existence of an optimal scheme that maximizes the joint throughput of the target secondary user. -
1 基于PCCP的无源反射元件系数优化算法
初始化 $ {{\boldsymbol{\phi}} ^{(0)}} $, $\upsilon \gt 1$, ${\lambda ^{(0)}} \gt 0$,并设 $i = 0$ Repeat: (1) if $i \lt {I_{\max }}$ (2) 求解式(40)并将最优质记为$ {{\boldsymbol{\phi}} ^{(i + 1)}} $ (3) 更新${\lambda ^{(i + 1)}} = \min \{ \upsilon {\lambda ^{(i)}},{\lambda _{\max }}\} $ (4) $i = i + 1$ (5) else (6) 重新初始化一个新的$ {{\boldsymbol{\phi}} ^{(0)}} $, $\upsilon \gt 1$, ${\lambda ^{(0)}} \gt 0$ and $i = 0$ (7) end if Until: ${\left\| {{{\boldsymbol{\phi}} ^{(i)}} - {{\boldsymbol{\phi}} ^{(i - 1)}}} \right\|_1} \le {\varepsilon ^{'}}$, ${\left\| {\boldsymbol{b}} \right\|_1} \le {\varepsilon ^{''}}$ 输出:最优值${\boldsymbol{{\phi}} ^{(*)}} = {{\boldsymbol{\phi}} ^{(i)}}$  下载: 导出CSV
下载: 导出CSV
2 基于外点法关于时间分配向量的优化算法
初始化${\delta ^{(0)}}$,${{\boldsymbol{t}}_{\rm{c}}}^{(0)} = \{ {t_{{\text{sense}}}}^{(0)},{t_{{\text{comm}}}}^{(0)},{t_{{\text{comp}}}}^{(0)}\} $,计算$ {{\boldsymbol{\theta }}^{(0)}} $并设$k = 0$,收敛精度${\varepsilon _1}$ 和${\varepsilon _2}$,惩罚系数$ c $ (1) 用单纯形法求辅助函数$F({{\boldsymbol{t}}_{\rm{c}}},\delta )$的无约束极值点${{\boldsymbol{t}}_{\rm{c}}}^*({\delta ^{(k + 1)}})$ (2) 计算${{\boldsymbol{t}}_{\rm{c}}}^*({\delta ^{(k)}})$的约束违反情况 (3) 如果$\min \{ {g_1}({{\boldsymbol{t}}_{\rm{c}}}^{\boldsymbol{*}}({\delta ^{(k)}})),{g_2}({{\boldsymbol{t}}_{\rm{c}}}^{\boldsymbol{*}}({\delta ^{(k)}})),{g_3}({{\boldsymbol{t}}_{\rm{c}}}^{\boldsymbol{*}}({\delta ^{(k)}}))\} \le {\varepsilon _1}$,${{\boldsymbol{t}}_{\rm{c}}}^*({\delta ^{(k)}})$接近约束边界,停止迭代并输出最优解${{\boldsymbol{t}}_{\rm{c}}}^*({\delta ^{(k)}})$到
AOIA进行下一步计算。否则,继续下一步。(4) 若$\left\| {{{\boldsymbol{t}}_{\rm{c}}}^*({\delta ^{(k + 1)}}) - {{\boldsymbol{t}}_{\rm{c}}}^*({\delta ^{(k)}})} \right\| \le {\varepsilon _2}$,停止迭代。否则$k = k + 1$,$ {\delta ^{(k + 1)}} = c{\delta ^{(k)}} $,${{\boldsymbol{t}}_{\rm{c}}}^{(0)} = {{\boldsymbol{t}}_{\rm{c}}}^*({\delta ^{(k)}})$,跳回到第2步重新计算。
下载: 导出CSV
3 采用增广拉格朗日算法来求解最优功率分配向量算法
(1) 初始化 $ {\lambda _0} \ge 0 $, $ {\mu _0} $, $ {({p_{{\text{sense}}}})^{(0)}} $,并设$k = 0$ (2) 求解雷达系统功率,$ {({p_{{\text{sense}}}})^{(k + 1)}} = \arg \mathop {\min }\limits_{{p_{{\text{sense}}}}} L({({p_{{\text{sense}}}})^{(k)}},{\lambda _k},{\mu _k},\rho ) $ (3) $ {\lambda _{k + 1}} = {\lambda _k} + \rho {\gamma _1}{\text{(}}{({p_{{\text{sense}}}})^{(k)}}{\text{)}} $, $ {\mu _{k + 1}} = {\mu _k} + \rho {\gamma _2}{\text{(}}{({p_{{\text{sense}}}})^{(k)}}{\text{)}} $ (4) 若$L({({p_{{\text{sense}}}})^{(k + 1)}},{\lambda _{k + 1}},{\mu _{k + 1}},\rho ) - L({({p_{{\text{sense}}}})^{(k)}},{\lambda _k},{\mu _k},\rho ) \le \varepsilon $,停止迭代,输出${({p_{{\text{sense}}}})^{(*)}} = {({p_{{\text{sense}}}})^{(k + 1)}}$。否则$k = k + 1$,跳回
到第3步重新计算。
下载: 导出CSV
4 基于交替优化的迭代算法
(1) 初始化 $ {{\boldsymbol{\theta }}^{(0)}} $, ${{\boldsymbol{t}}_{\rm{c}}}^{(0)}$, $ {{\boldsymbol{P}}^{(0)}} $, $ R({{\boldsymbol{\theta }}^{(0)}},{{\boldsymbol{t}}_{\rm{c}}}^{(0)},{{\boldsymbol{P}}^{(0)}}) $,并设$r = 0$ (2) Repeat (3) 对于给定的$ \{ {{\boldsymbol{\theta }}^{(r)}},{{\boldsymbol{P}}^{(r)}}\} $求解问题2,并将最优解表示为
$ {{\boldsymbol{t}}_{\rm{c}}}^{(r + 1)} $(4) 对于给定的$ \{ {{\boldsymbol{\theta }}^{(r)}},{{\boldsymbol{P}}^{(r)}},{{\boldsymbol{t}}_{\rm{c}}}^{(r + 1)}\} $,求解问题1可获得最优解
$ {{\boldsymbol{\theta }}^{(r + 1)}} $(5) 对于给定的$ \{ {{\boldsymbol{\theta }}^{(r + 1)}},{{\boldsymbol{P}}^{(r)}},{{\boldsymbol{t}}_{\rm{c}}}^{(r + 1)}\} $,求解问题3可获得最优
解$ {{\boldsymbol{P}}^{(r + 1)}} $并计算得到目标函数值$ {R^{(r + 1)}} $(6) $r = r + 1$ (7) Until目标函数值的变化小于阈值${\mathcal{E}} $。输出最优值
$ \{ {{\boldsymbol{\theta }}^{(*)}},{{\boldsymbol{P}}^{(*)}},{{\boldsymbol{t}}_{\rm{c}}}^{(*)},{R^{(*)}}\} $
下载: 导出CSV
表 1 仿真参数表
参数名称 参数设置 参数名称 参数设置 次用户的时间帧长度 ${T_{{\text{Total}}}} = 10{\text{ ms}}$ 假设${Q_0}$概率 $ P({Q_0}) = 0.6 $ 次用户每帧总功率 ${P_{{\text{Total}}}} = 25{\text{ dB}}$ 假设${Q_1}$概率 $ P({Q_1}) = 0.4 $ 雷达脉冲频率 $ {f_{\mathrm{s}}} = 100{\text{ kHz}} $ BS天线数量 $ M = 5 $ 单个雷达脉冲回波信号 ${\chi _{\mathrm{r}}} = 0{\text{ dB}}$ 路径损耗指数 $ {\partial _1} = {\partial _2} = {\partial _3} = 3 $ 小区半径 $500{\text{ m}}$ 载波频率 $ 2{\text{ GHz}} $ 带宽 $ 4{\text{ MHz}} $ 车道数量 $ 6 $ 车速 $ 70{\text{ km/h}} $ 车道宽度 $ 4{\text{ m}} $ 车辆之间的平均距离 $ 2.5{\text{ }}v{\text{, }}v{\text{ in m/s}} $ 噪声功率($ {\sigma ^2} $) $ - 114{\text{ dBm}} $ 车辆掉落模型 空间泊松过程
下载: 导出CSV
-
[1] MENG Kaitao, WU Qingqing, CHEN Wen, et al. Sensing-assisted communication in vehicular networks with intelligent surface[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1): 876–893. doi: 10.1109/TVT.2023.3307100. [2] TAN Xiaobin, MENG Qiushi, WANG Mingyang, et al. Digital twin-based cloud-native vehicular networks architecture for intelligent driving[J]. IEEE Network, 2024, 38(1): 69–76. doi: 10.1109/MNET.2023.3337271. [3] HASAN M, MOHAN S, SHIMIZU T, et al. Securing Vehicle-to-Everything (V2X) communication platforms[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(4): 693–713. doi: 10.1109/TIV.2020.2987430. [4] LIU Fan, ZHOU Longfei, MASOUROS C, et al. Toward dual-functional radar-communication systems: Optimal waveform design[J]. IEEE Transactions on Signal Processing, 2018, 66(16): 4264–4279. doi: 10.1109/TSP.2018.2847648. [5] PEI Yiyang, HOANG A T, and LIANG Yingchang Sensing-throughput tradeoff in cognitive radio networks: How frequently should spectrum sensing be carried out[C]. The 18th International Symposium on Personal, Indoor and Mobile Radio Communications, Athens, Greece, 2017: 1–5. doi: 10.1109/PIMRC.2007.4394632. [6] SINGH K, BISWAS S, RATNARAJAH T, et al. Transceiver design and power allocation for full-duplex MIMO communication systems with spectrum sharing radar[J]. IEEE Transactions on Cognitive Communications and Networking, 2018, 4(3): 556–566. doi: 10.1109/TCCN.2018.2830758. [7] DUGGAL G, RAM S S, and MISHRA K V. Micro-range detection via Doppler-resilient 802.11ad-based vehicle-to-pedestrian radar[C]. 2019 IEEE Radar Conference, Boston, USA, 2019: 1–6. doi: 10.1109/RADAR.2019.8835525. [8] HASHIDA H, KAWAMOTO Y, KATO N, et al. Mobility-aware user association strategy for IRS-aided mm-Wave multibeam transmission towards 6G[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(5): 1667–1678. doi: 10.1109/JSAC.2022.3143216. [9] VERMA S, KAWAMOTO Y, and KATO N. A network-aware internet-wide scan for security maximization of IPv6-enabled WLAN IoT devices[J]. IEEE Internet of Things Journal, 2021, 8(10): 8411–8422. doi: 10.1109/JIOT.2020.3045733. [10] WU Qingqing and ZHANG Rui. Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network[J]. IEEE Communications Magazine, 2020, 58(1): 106–112. doi: 10.1109/MCOM.001.1900107. [11] LYU Bin, HOANG D T, GONG Shimin, et al. IRS-based wireless jamming attacks: When jammers can attack without power[J]. IEEE Wireless Communications Letters, 2020, 9(10): 1663–1667. doi: 10.1109/LWC.2020.3000892. [12] CUI Tiejun, QI Meiqing, WAN Xiang, et al. Coding metamaterials, digital metamaterials and programmable metamaterials[J]. Light: Science & Applications, 2014, 3(10): e218. doi 10.1038/lsa.2014.99. [13] BASAR E, DI RENZO M, DE ROSNY J, et al. Wireless communications through reconfigurable intelligent surfaces[J]. IEEE Access, 2019, 7: 116753–116773. doi: 10.1109/ACCESS.2019.2935192. [14] 仲伟志, 何艺, 段洪涛, 等. 可重构智能表面辅助的V2I通信系统联合波束赋形算法[J]. 电子与信息学报, 2024, 46(8): 3117–3125. doi: 10.11999/JEIT231324.ZHONG Weizhi, HE Yi, DUAN Hongtao, et al. Joint beamforming algorithm for reconfigurable intelligent surface-aided V2I communication system[J]. Journal of Electronics & Information Technology, 2024, 46(8): 3117–3125. doi: 10.11999/JEIT231324. [15] NGUYEN N T, VU Q D, LEE K, et al. Hybrid relay-reflecting intelligent surface-assisted wireless communications[J]. IEEE Transactions on Vehicular Technology, 2022, 71(6): 6228–6244. doi: 10.1109/TVT.2022.3158686. [16] BJÖRNSON E, ÖZDOGAN Ö, and LARSSON E G. Intelligent reflecting surface versus decode-and-forward: How large surfaces are needed to beat relaying[J]. IEEE Wireless Communications Letters, 2020, 9(2): 244–248. doi: 10.1109/LWC.2019.2950624. [17] HUANG Ao, GUO Li, MU Xidong, et al. Coexisting passive RIS and active relay-assisted NOMA systems[J]. IEEE Transactions on Wireless Communications, 2023, 22(3): 1948–1963. doi: 10.1109/TWC.2022.3208006. [18] LI Qiang, BAI Song, LI Jun, et al. RIS-assisted joint active and passive transmission with distributed reception[J]. IEEE Transactions on Vehicular Technology, 2023, 72(5): 6805–6809. doi: 10.1109/TVT.2022.3229494. [19] NGUYEN N T, NGUYEN V D, VAN NGUYEN H, et al. Fairness enhancement of UAV systems with hybrid active-passive RIS[J]. IEEE Transactions on Wireless Communications, 2024, 23(5): 4379–4396. doi: 10.1109/TWC.2023.3317934. [20] LIU Zhipeng, LI Xi, JI Hong, et al. Toward STAR-RIS-empowered integrated sensing and communications: Joint active and passive beamforming design[J]. IEEE Transactions on Vehicular Technology, 2023, 72(12): 15991–16005. doi: 10.1109/TVT.2023.3294338. [21] ZHANG Zijian, DAI Linglong, CHEN Xibi, et al. Active RIS vs. passive RIS: Which will prevail in 6G?[J]. IEEE Transactions on Communications, 2023, 71(3): 1707–1725. doi: 10.1109/TCOMM.2022.3231893. [22] JEBBAR Y, PROMWONGSA N, BELQASMI F, et al. A case study on the deployment of a tactile internet application in a hybrid cloud, edge, and mobile ad hoc cloud environment[J]. IEEE Systems Journal, 2022, 16(1): 1182–1193. doi: 10.1109/JSYST.2021.3074095. [23] 董裕民, 张静, 谢昌佐, 等. 云边端架构下边缘智能计算关键问题综述: 计算优化与计算卸载[J]. 电子与信息学报, 2024, 46(3): 765–776. doi: 10.11999/JEIT230390.DONG Yumin, ZHANG Jing, XIE Changzuo, et al. A survey of key issues in edge intelligent computing under cloud-edge-terminal architecture: Computing optimization and computing offloading[J]. Journal of Electronics & Information Technology, 2024, 46(3): 765–776. doi: 10.11999/JEIT230390. [24] DAI Penglin, HU Kaiwen, WU Xiao, et al. A probabilistic approach for cooperative computation offloading in MEC-assisted vehicular networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 899–911. doi: 10.1109/TITS.2020.3017172. [25] LIU Qian, LIANG Hairong, LUO Rui, et al. Energy-efficiency computation offloading strategy in UAV aided V2X network with integrated sensing and communication[J]. IEEE Open Journal of the Communications Society, 2022, 3: 1337–1346. doi: 10.1109/OJCOMS.2022.3195703. [26] MICHAILIDIS E T, VOLAKAKI M G, MIRIDAKIS N I, et al. Optimization of secure computation efficiency in UAV-enabled RIS-assisted MEC-IoT networks with aerial and ground eavesdroppers[J]. IEEE Transactions on Communications, 2024, 72(7): 3994–4009. doi: 10.1109/TCOMM.2024.3372877. [27] XIE Hao, LI Dong, and GU Bowen. Exploring hybrid active-passive RIS-aided MEC systems: From the mode-switching perspective[J]. IEEE Transactions on Wireless Communications, 2024, 23(9): 11291–11308. doi: 10.1109/TWC.2024.3380841. [28] BIAN Mengqi, SHI Yunmei, HUANG Yi, et al. QoS-aware energy storage maximization in the RIS-aided joint-SWIPT-MEC system[J]. IEEE Communications Letters, 2023, 27(12): 3434–3438. doi: 10.1109/LCOMM.2023.3324716. [29] MALIK R and VU M. Optimal transmission using a self-sustained relay in a full-duplex MIMO system[J]. IEEE Journal on Selected Areas in Communications, 2019, 37(2): 374–390. doi: 10.1109/JSAC.2018.2872617. [30] XU Sai, DU Yanan, ZHANG Jiliang, et al. An IRS backscatter enabled integrated sensing, communication and computation system[J]. arXiv: 2207.10219, 2022. [31] 姜南. 基于雷达检测的认知车联网关键技术研究[D]. [硕士论文], 北京邮电大学, 2020.JIANG Nan. Research on key technologies of cognitive vehicular ad hoc network based on radar detection[D]. [Master dissertation], Beijing University of Posts and Telecommunications, 2020. [32] GRANT M and BOYD S. CVX: MATLAB software for disciplined convex programming, Version 2.2[EB/OL]. http://cvxr.com/cvx, 2020. [33] BOYD S and VANDENBERGHE L. Convex Optimization[M]. Cambridge: Cambridge University Press, 2004. [34] BEN-TAL A and NEMIROVSKI A. Lectures on Modern Convex Optimization: Analysis, Algorithms, and Engineering Applications[M]. Philadelphia: SIAM, 2001. [35] WANG Kunyu, SO A M C, CHANG T H, et al. Outage constrained robust transmit optimization for multiuser MISO downlinks: Tractable approximations by conic optimization[J]. IEEE Transactions on Signal Processing, 2014, 62(21): 5690–5705. doi: 10.1109/TSP.2014.2354312. [36] 徐勇军, 谷博文, 谢豪, 等. 全双工中继协作下的移动边缘计算系统能耗优化算法[J]. 电子与信息学报, 2021, 43(12): 3621–3628. doi: 10.11999/JEIT200937.XU Yongjun, GU Bowen, XIE Hao, et al. Energy consumption optimization algorithm for full-duplex relay-assisted mobile edge computing systems[J]. Journal of Electronics & Information Technology, 2021, 43(12): 3621–3628. doi: 10.11999/JEIT200937. -


 下载:
下载:









图(11) / 表(5)
计量
- 文章访问数: 1187
- HTML全文浏览量: 621
- PDF下载量: 126
- 被引次数: 0
