

Wide-Area Multilateration Time Synchronization Method Based on Signal Arrival Time Modeling
-
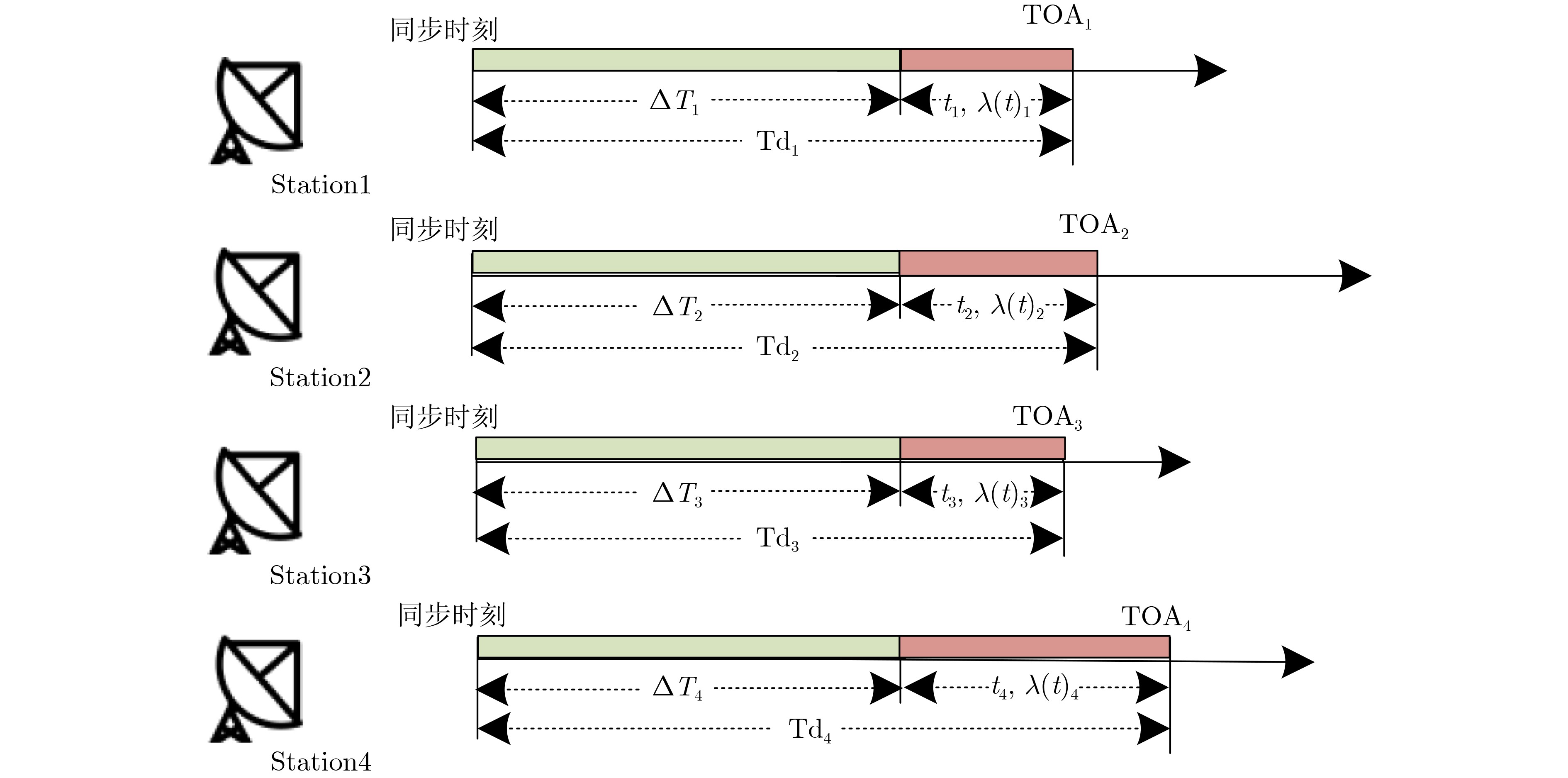
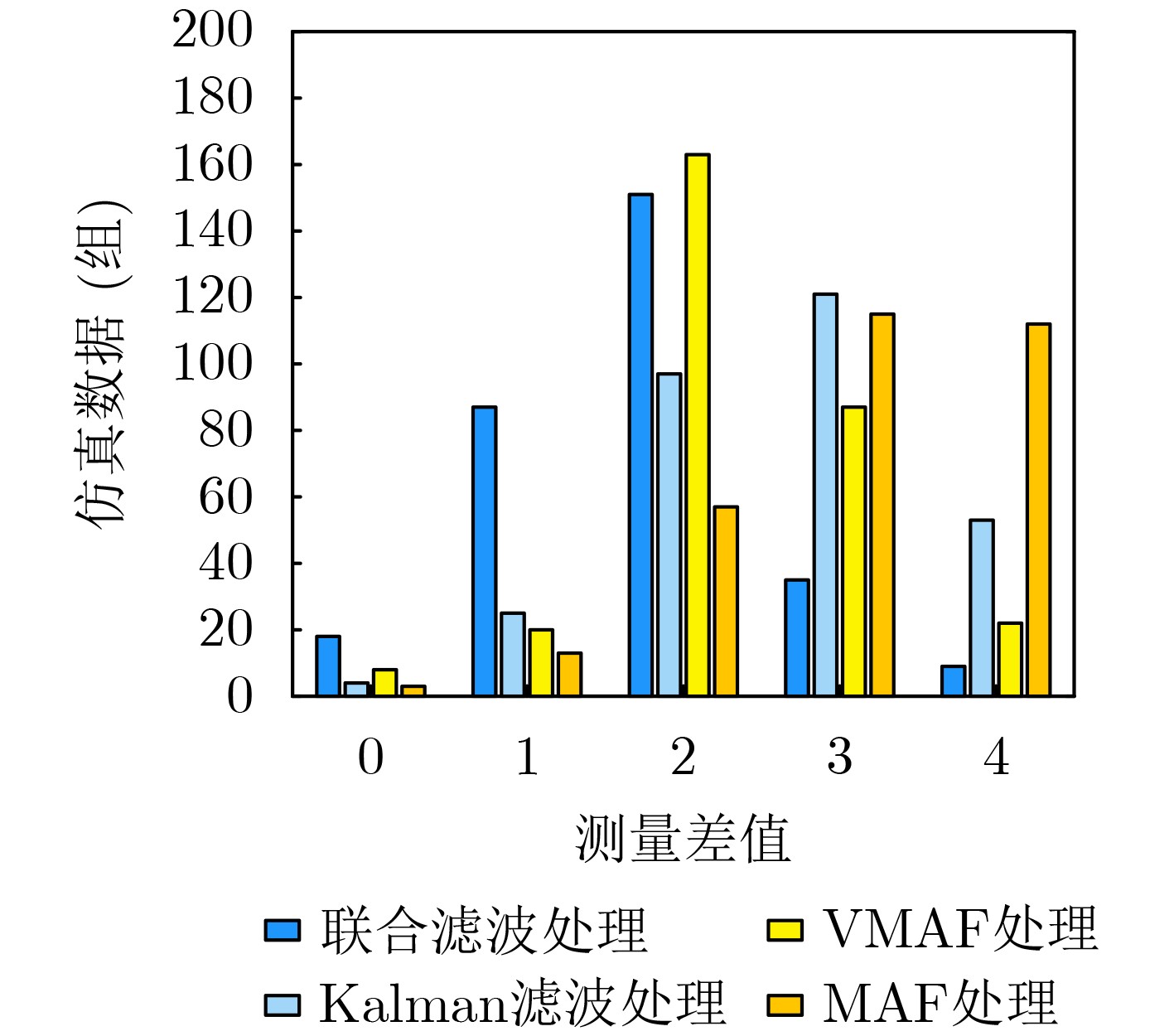
摘要: 针对低空监视技术广域多点定位(WAM)时间同步困难或复杂度高,影响定位精度的问题,该文构建了基于到达时间(TOA)的时间同步及“同一消息”提取的数学模型,通过计算地面传感器的“同步启动时间”完成同步,计算复杂度低且易于实现。在此基础上,利用同一消息提取模型筛选出TOA用于定位计算。为了提高TOA估计值的精度,减小同步误差。提出了可变滑动滤波与卡尔曼滤波结合 (VMAF-Kalman)的联合滤波方法,提高可编程门阵列 (FPGA)基准时钟的稳定性,减小时钟延迟引起的TOA计数误差。仿真结果表明,联合滤波比单一滤波算法效果更好,TOA计数误差分别降低36.84%和25.36%。对无人机和民航飞机的定位测验结果都表现出较高的定位准确率,定位误差和位置更新速率符合标准要求,证明该文所提模型,具有实用性且有较好的同步精度。Abstract:
Objective Wide-Area Multilateration (WAM), a high-precision positioning technology currently under nationwide deployment, is widely applied in aircraft positioning on airport surfaces and in terminal areas. However, as WAM depends on collaborative signal processing across multiple stations, challenges such as time synchronization and computational complexity continue to constrain positioning accuracy. This study develops a mathematical model for time synchronization and “same-message” extraction based on Time Of Arrival (TOA), achieving synchronization by calculating the “synchronized start time” of ground sensors. The proposed method offers low computational complexity and is straightforward to implement. To enhance TOA estimation accuracy and reduce synchronization error, a joint filtering strategy—Variable Moving Average Filtering and Kalman (VMAF-Kalman)—is proposed to minimize TOA counting deviations introduced by clock drift. The model addresses synchronization challenges in distributed station deployments and employs joint filtering to correct initial clock source deviations. Methods This study addresses the challenge of high-precision TOA acquisition by proposing a joint filtering method that combines VMAF-Kalman. This approach filters the phase difference count between the GPS 1 Pulse Per Second (1PPS) signal and the local crystal oscillator 1PPS signal, producing a stable reference clock to mitigate the effects of noise and oscillator aging that induce clock drift. Therefore, stable TOA counting with a precision of 2.5 ns is achieved in Field-Programmable Gate Arrays (FPGAs). To resolve synchronization issues in distributed WAM systems, a time synchronization model based on TOA is proposed, which determines the synchronized start time of remote stations. Additionally, a same-message extraction model is developed to identify the TOA of identical messages, enabling accurate multilateration positioning. Results and Discussions Two experiments evaluate the proposed method and model: a filtering performance comparison and an actual flight trajectory positioning experiment for time synchronization validation. The latter includes two simulation scenarios: Scenario 1 consists of drone positioning tests, and Scenario 2 consists of civil aviation aircraft positioning tests. The simulation results indicate that the joint filtering method outperforms single filtering approaches, reducing TOA counting errors by 36.84% and 25.36% in the respective scenarios. Both the drone and civil aviation tests demonstrate high positioning accuracy, with errors and update rates meeting standard requirements. These findings confirm the practicality of the proposed method and the improved synchronization accuracy of the model. Conclusions Firstly, the proposed VMAF-Kalman joint filtering method demonstrates clear advantages over single filtering algorithms in both performance and hardware efficiency. Simulation results show that the output of the PID controller remains within a narrower fluctuation range, while TOA counting errors are reduced by 36.84% and 25.36%, respectively. These findings confirm that joint filtering stabilizes clock signals, improves TOA counting accuracy in FPGAs, and reduces synchronization errors. Secondly, the time synchronization and same-message extraction models developed in this study simplify existing synchronization methods by enabling WAM synchronization and TOA extraction through algorithmic computation alone. Simulations incorporating actual flight data in low-altitude airspace, verified across multiple positioning algorithms, further validate the model. Drone test results show that vertical Root Mean Square Error (RMSE) and deviation remain within 20 m, with horizontal RMSE below 10 m. For civil aviation aircraft, all algorithms achieved accuracy rates above 80%, with average errors under 300 m and position update intervals within 5 s, meeting established standards. The experimental outcomes confirm the feasibility and applicability of the proposed model for high-precision WAM time synchronization. -
表 1 MAF和VMAF滤波结果
N=8 N=16 N=32 MAF-SD/s (s) 4.977 6×10–11 4.763 2×10–11 4.658 2×10–11 VMAF-SD/s (s) 4.794 5×10–11 4.706 2×10–11 4.646 1×10–11 MAF-OF 9.726 5×10–4 1.017 7×10–3 1.040 7×10–3 VMAF-OF 9.704 4×10–4 9.836 2×10–4 1.031 5×10–3  下载: 导出CSV
下载: 导出CSV
表 2 不同滤波算法的TOA计数差值
滤波方法 TOA计数平均差值
(时钟周期)(个)TOA计数平均差值
(时间)(ns)联合滤波 1.56 3.902 Kalman滤波 2.47 6.175 VMAF 2.09 5.225
下载: 导出CSV
表 3 不同定位算法定位结果
Chan算法 Chan-Taylor组合算法 Fang算法 $ {\bar s_{\mathrm{h}}} $(m) 136.630 8 101.571 8 120.481 2 $ {\bar s_{\mathrm{v}}} $(m) 174.502 6 131.751 7 160.341 8 $ \eta $(%) 80.44 87.02 82.58 $ t $(s) 3.42 4.18 3.73
下载: 导出CSV
-
[1] Santos D. Falcão D, Pinto A, et al. Effect of membrane electrode assembly characteristics on the performance of a proton exchange membrane fuel cell stack designed for unmanned aerial vehicle applications[J]. International Journal of Green Energy, 2024, 21(6): 1226–1237. doi: 10.1080/15435075.2023.2244062. [2] H. Miyazaki, T. Koga, E. Ueda, Y. Kakubari and S. Nihei, Development of high performance WAM system[C]. 2011 Tyrrhenian International Workshop on Digital Communications - Enhanced Surveillance of Aircraft and Vehicles, Capri, Italy, 2011, pp. 237–240. [3] M. Monteiro et al., Detecting malicious ADS-B broadcasts using wide area multilateration[J]. 2015 IEEE/AIAA 34th Digital Avionics Systems Conference (DASC), Prague, Czech Republic, 2015, pp. 4A3-1–4A3-12. doi: 10.1109/DASC.2015.7311413. [4] H. Khudov, A. Fedorov, D. Holovniak and G. Misiyuk, Improving the Efficiency of Radar Control of Airspace with the Multilateration System Use[C]. 2018 International Scientific-Practical Conference Problems of Infocommunications. Science and Technology (PIC S&T), Kharkiv, Ukraine, 2018, pp. 680-684. doi: 10.1109/INFOCOMMST.2018.8632141. [5] Jheng S L, Jan S S, Chen Y H, et al. 1090 MHz ADS-B-based wide area multilateration system for alternative positioning navigation and timing[J]. IEEE sensors journal, 2020, 20(16): 9490–9501. doi: 10.1109/JSEN.2020.2988514. [6] E. Widdison and D. G. Long, A Review of Linear Multilateration Techniques and Applications[J]. IEEE Access, vol. 12, pp. 26251–26266, 2024, DOI: 10.1109/ACCESS.2024.3361835. [7] Neven W, Quilter T J, Weedon R, et al. Wide area multilateration report on EATMP TRS 131/04[M]. Brussels: European Organization for the Safety of Air Navigation, 2004. [8] Jiang Chaoshu, Liu Changzhong and Wang Xuegang, GPS synchronized wide area multilateration system[C]. 2009 International Conference on Communications, Circuits and Systems, Milpitas, CA, USA, 2009, pp. 457–459, DOI: 10.1109/ICCCAS.2009.5250465. [9] Leonardi, M., Bellipanni, L., Galati, G. (2010). All satellites in view: GNSS-based synchronization for wide area multilateration[C]. The European Navigation Conference Global Navigation Satellite Systems ENC GNSS 2010. Deutsche Gesellschaft für Ortung und Navigation e. V. (DGON). [10] R. Seller and Á. Szüllő, Wide area multilateration demonstration system[C]. ICECom 2013, Dubrovnik, Croatia, 2013, pp. 1–5. doi: 10.1109/ICECom.2013.6684741. [11] M. Pelant and V. Stejskal, Multilateration system time synchronization via over-determination of TDOA measurements[C]. 2011 Tyrrhenian International Workshop on Digital Communications - Enhanced Surveillance of Aircraft and Vehicles, Capri, Italy, 2011, pp. 179–183. [12] D. Eier and M. Sharples, Method for GPS and GNSS Independent MLAT System Synchronization[C]. 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 2019, pp. 1–6. doi: 10.1109/ICNSURV.2019.8735228. [13] 马永圣, 张敏, 郭福成. 基于ADS-B的多站时间同步系统的偏差联合估计方法[J]. 系统工程与电子技术, 2018, 40(04): 726–732. doi: 10.3969/j.issn.1001-506X.2018.04.02.MA Yongsheng, ZHANG Min, GuoFucheng. Joint bias estimation method for multi-station time synchronization system based on ADS-B[J]. Systems Engineering and Electronics, 2018, 40(04): 726–732. doi: 10.3969/j.issn.1001-506X.2018.04.02. [14] Xu H, Wang G, Guo L, et al. Implementation of field programmable Gate array-based clock synchronization in the fiber channel communication system[J]. The Review of scientific instruments, 2024, 95(3). [15] 吴文臻. 基于改进时间同步的矿井UWB优化定位方法[J]. 工矿自动化, 2024, 50(S1): 34–38.WU Wenzhen. Research on mine UWB optimized positioning method based on improved time synchronization[J]. Journal of Mine Automation, 2024, 50(S1): 34–38. [16] 胡爱华, 邓中亮, 张耀. 基于改进TPSN和卡尔曼滤波的时间同步算法[J]. 现代电子技术, 2018, 41(13): 5–9. doi: 10.16652/j.issn.1004-373x.2018.13.002.HU Aihua1, DENG Zhongliang, ZHANG Yao. Time synchronization algorithm based on improved TPSN and Kalman filtering[J]. Modern Electronics Technique, 2018, 41(13): 5–9. doi: 10.16652/j.issn.1004-373x.2018.13.002. [17] 王义君, 钱志鸿. 自适应高效无线传感器网络时间同步优化算法[J]. 电子与信息学报, 2022, 44(08): 2802–2813. doi: 10.11999/JEIT210533.WANG Yijun, QIANZhihong. Adaptive and Efficient Time Synchronization Optimization Algorithm in Wireless Sensor Networks[J]. Journal of Electronics & Information Technology, 2022, 44(08): 2802–2813. doi: 10.11999/JEIT210533. [18] 周华勇, 陈珍萍. 基于群智慧对选择算法的分布式一致性时间同步方法[J]. 传感技术学报, 2023, 36(08): 1296–1302. doi: 10.3969/j.issn.1004-1699.2023.08.017.ZHOU Huayong, CHEN Zhenping. Distributed Consensus Time Synchronization Method Based on Group-Wise Pair Selection Algorithm[J]. CHINESE JOURNAL OF SENSORS AND ACTUATORS, 2023, 36(08): 1296–1302. doi: 10.3969/j.issn.1004-1699.2023.08.017. [19] Jacek Stefanski, Asynchronous wide area multilateration system[J]. Aerospace Science and Technology, Volume 36, 2014, Pages 94-102, ISSN 1270-9638, https://doi.org/10.1016/j.ast.2014.03.016. [20] Stefanski, J. , Sadowski, J. TDOA versus ATDOA for wide area multilateration system[J]. Wireless Com Network, 2018, 179 (2018). https://doi.org/10.1186/s13638-018-1191-5. [21] Sadowski J, Stefanski J. Asynchronous WAM with Irregular Pulse Repetition[J]. Journal of Navigation, 2019;72(1): 85-100. doi: 10.1017/S0373463318000607. [22] Vyskocil P, Sebesta J. Relative timing characteristics of GPS timing modules for time synchronization application[C]. 2009 International Workshop on Satellite and Space Communications. https://doi.org/10.1109/iwssc.2009.5286378. [23] 吴红卫, 李铎, 顾思洪. 小波滤波在时间同步系统中应用研究[J]. 仪器仪表学报, 2019, 40(02): 182–189. doi: 10.19650/j.cnki.cjsi.J1804233.Wu Hongwei, Li Duo, Gu Sihong. Application research of wavelet filtering in time synchronization system[J]. Chinese Journal of Scientific Instrument, 2019, 40(02): 182–189. doi: 10.19650/j.cnki.cjsi.J1804233. [24] Xiong H, Chen Z, Yang B, et al. TDOA localization algorithm with compensation of clock offset for wireless sensor networks[J]. China Communications, 2015. DOI: 10.1109. [25] 丁勇, 王慧聪, 高伟, 等. 基于北斗导航的时钟驯服导航接收机设 计[C]. 第十四届中国卫星导航年会论文集; 2024: 6. DOI: 10.26914/c.cnkihy.2024.000088.Yong Ding, Huicong Wang, Wei Gao, et al. Design of Disciplined Clock Navigation Receiver based on Beidou Navigation[C]. Proceedings of the 14th Annual China Satellite Navigation Conference; 2024: 6. DOI:10.26914 /c.cnkihy. 2024.000088. [26] 张国琴, 吴玉蓉. 基于GPS校准晶振的高精度时钟的设计[J]. 仪表技术, 2010(04): 23–24+27. doi: 10.19432/j.cnki.issn1006-2394.2010.04.008.Zhang Guoqin, Wu Yurong. Design of High Precision Clock Based on the GPS Disciplined Oscillator[J]. Instrumentation Technology, 2010(04): 23–24+27. doi: 10.19432/j.cnki.issn1006-2394.2010.04.008. [27] WILLNER A N, LIAO P, ZOU K, et al. Scalable and reconfigurable optical tapped-delay-line for multichannel equalization and correlation using nonlinear wave mixing and a Kerr frequency comb[J]. Optics Letters, 2018, 43(22): 5563–5566. doi: 10.1364/OL.43.005563. [28] 刘典, 汤新民. 基于分布式授时的多点定位接收机设计[J]. 测控技术, 2023, 42(08): 76–82. doi: 10.19708/j.ckjs.2023.08.012.LIU Dian, TANG Xinmin. Design of Multi-Point Position Receiver Based on Distributed Timing[J]. Measurement & Control Technology, 2023, 42(08): 76–82. doi: 10.19708/j.ckjs.2023.08.012. [29] 宫峰勋, 第五瑶光. 低信噪比S模式信号到达时间估计联合算法[J/OL]. 北京航空航天大学学报, 1–13. [2024-05-23]. https://doi.org/10.13700/j.bh.1001-5965.2023.0027.Gong Fengxun, DIWU Yaoguang. Time of arrival estimation of S-mode signals under low SNR by joint algorithm[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, 1–13[2024-05-23]. https://doi.org/10.13700/j.bh.1001-5965.2023.0027. [30] 陈甲. 工业控制中PID的参数整定方法[J]. 自动化应用, 2023, 64(23): 50–52.CHEN Jia. Parameter Tuning Method for PID in Industrial Control[J]. Application of Automation, 2023, 64(23): 50–52. [31] 任宣铭, 汤新民, 刘雨生, 等. 基于INT-VSMM算法的目标航迹跟踪和外推[J/OL]. 北京航空航天大学学报, 1–17. [2024-04-22]. https://doi.org/10.13700/j.bh.1001-5965.2023.0724.REN Xuanming, TANG Xinmin, LIU Yusheng, et al. Target trajectory tracking and extrapolation based on the INT-VSMM algorithm[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, 1–17 [2024-04-22]. https://doi.org/10.13700/j. bh.1001-5965.2023.0724. [32] Jianhua Zhang, Feng Gao, Yang Li, et al. Simulation of multilateration system based on Chan algorithm and conjugate gradient optimization algorithm[J]. International Journal of Simulation and Process Modelling, 2019, 14(5). [33] R. Zhou, H. Sun, H. Li and W. Luo, Time-difference-of-arrival Location Method of UAV Swarms Based on Chan-Taylor[C]. 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 2020, pp. 1161-1166, doi: 10.1109/ICUS50048.2020.9274877. [34] 陈思涵. 基于Fang算法的TDOA室内定位技术[J]. 太赫兹科学与电子信息学报, 2017, 15(5): 752. doi: 10.11805/TKYDA201705.0752.CHEN Sihan. TDOA indoor location technology based on Fang algorithm[J]. Journal of terahertz science and electronic information technology, 2017, 15(5): 752. doi: 10.11805/TKYDA201705.0752. [35] 邱志豪. 场面和广域多点定位系统技术要求的差异性阐述[J]. 科教导刊(下旬), 2017(21): 35–36. DOI:10.16400 / j. cnki. Kjd kx.2017.07.017. doi: 10.16400/j.cnki.Kjdkx.2017.07.017.QIU ZhiHao. Explaining the Differences of Technical Requirement between MLAT and WAM[J]. Disciplines Exploration, 2017(21): 35–36. DOI:10.16400/j. cnki.kjdkx. 2017. 07.017. doi: 10.16400/j.cnki.Kjdkx.2017.07.017. -


 下载:
下载:

















图(18) / 表(3)
计量
- 文章访问数: 631
- HTML全文浏览量: 478
- PDF下载量: 66
- 被引次数: 0
