

An Intelligent Reflecting Surface Assisted Covert Communication System with a Cooperative Unmanned Aerial Vehicle
-
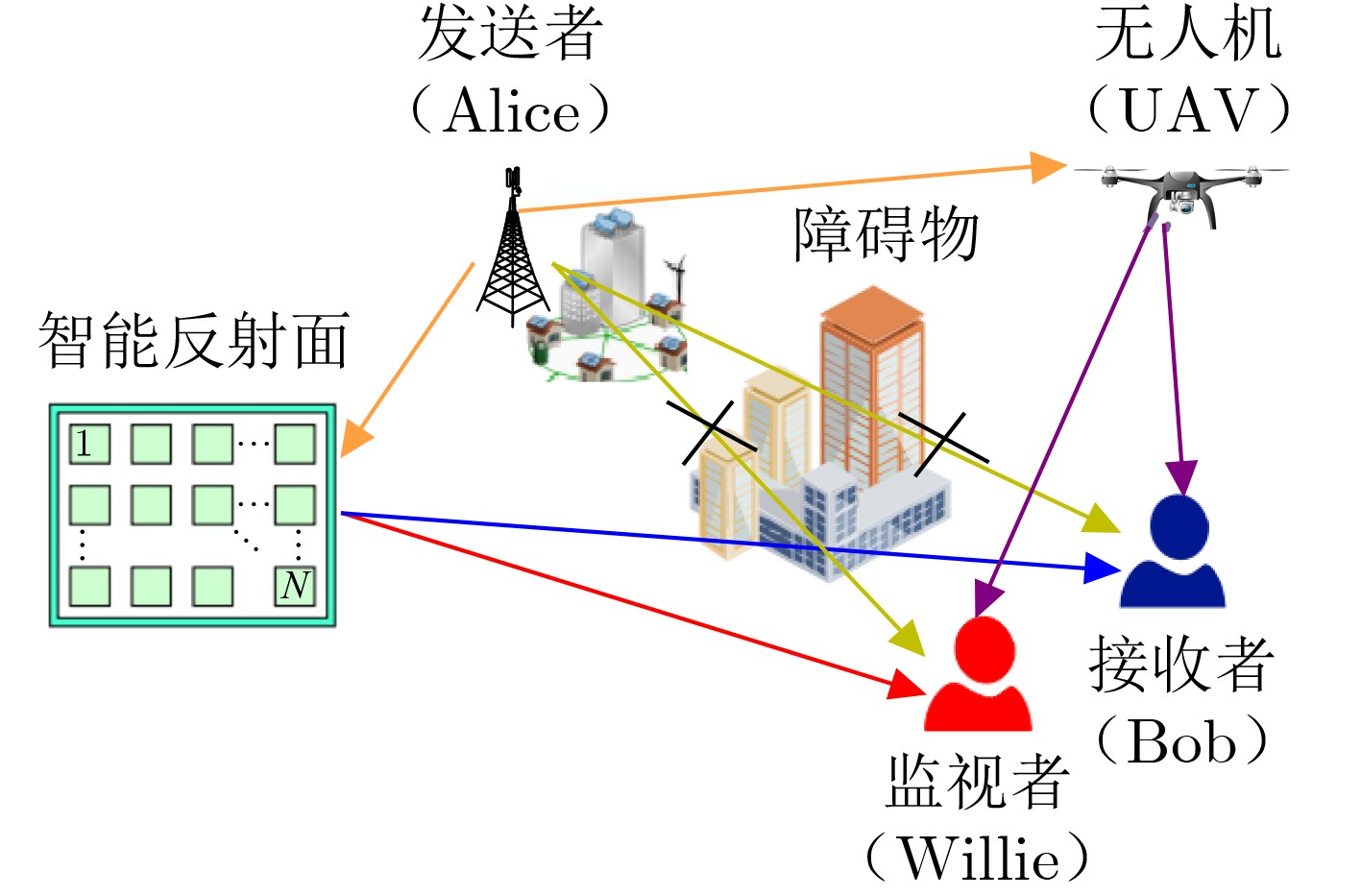
摘要: 隐蔽通信可以在被监控的情况下安全传输数据,是网络安全领域重要分支。然而,实际通信系统具有通信环境复杂、覆盖范围广等特点,这使得隐蔽通信很难部署。为此,该文提出一种基于智能反射面(IRS)与无人机(UAV)辅助的无线隐蔽通信系统。引入智能反射面作为中继节点转发发送者的信号,使用无人机作为发送者的友元节点,该友元节点通过发送人工噪声来干扰恶意用户对隐蔽通信的检测。在监听者接收噪声不确定的情况下,推导了最小错误检测概率,并与中断概率作为约束,以最大化隐蔽通信速率为目标 ,建立了系统的优化问题,采用Dinkelbach算法求解。仿真结果表明,当智能反射阵元的相位、干扰无人机的发射能量取得最优时,所提系统的隐蔽通信速率比单独配置智能反射面的无线通信系统平均提高了37.9%,比单独配置无人机的系统评价速率提高了1.17倍。Abstract:
Objective: Covert communication is a crucial area within network security, facilitating secure data transmission in monitored environments. Nevertheless, practical communication systems face challenges such as complex communication environments and extensive coverage areas. In recent years, Unmanned Aerial Vehicles (UAVs) have gained popularity in both commercial and military applications due to their flexibility, cost-effectiveness, and diverse applications. Additionally, Intelligent Reflection Surface (IRS)-assisted wireless communications have attracted significant attention, as IRS can be deployed in hostile communication environments while ensuring reliable transmission. Consequently, the exploration of hybrid IRS and UAV systems for the design of covert wireless communication systems presents a promising research avenue. Methods: This paper proposes a wireless covert communication system enhanced by an IRS and a UAV. In this configuration, the IRS functions as a relay node to transmit signals from the transmitter. The UAV serves as a cooperative relay node, facilitating not only the forwarding of covert messages to the intended receiver but also generating artificial noise to impede the detection of covert communication by malicious users. Under conditions of uncertainty regarding the received noise at the receiver, the minimum error detection probability is derived, and the system optimization problem is formulated with the objective of maximizing the covert communication rate while treating interruption probability as a constraint. Subsequently, the Dinkelbach-based approach is utilized to address the optimization problem. Results and Discussions: The key contributions of this research are as follows. First, a wireless covert communication system is developed using an IRS and an UAV. In this system, the IRS forwards covert messages from the transmitter to the receiver, while the UAV disrupts potential adversaries attempting to intercept secure communications. The integration of the IRS improves the covert communication rate, and the UAV-assisted design provides flexibility for deployment across diverse environments. The transmitter serves as the coordinator, managing both the UAV and IRS by transmitting control commands and collecting operational parameters. Second, the minimum detection error probability is derived under conditions of receiver uncertainty regarding noise, with the coordinates of the UAV and the transmitter assumed to be known. This derivation includes calculations of the False Alarm Probability (FAP) and the Missed Detection Probability (MDP) associated with the monitoring process. Third, a joint optimization problem is formulated to maximize the covert rate of the communication system. This problem optimizes the UAV’s trajectory, the IRS phase, and the transmit power while satisfying constraints related to the derived minimum detection error probability, maximum transmit power, and UAV mobility. The problem is restructured into a convex formulation by dividing it into two steps: optimization of the transmit power and UAV trajectory. Fourth, an iterative algorithm is developed to address the optimization challenge, employing the Successive Convex Approximation (SCA) and Dinkelbach methods. The Dinkelbach method is used to reformulate the upper bound of the optimization variables into a convex problem. Simulation results demonstrate that the maximum covert rate is achieved when the IRS phase, UAV trajectory, and transmit power are jointly optimized. Conclusions: In conclusion, the research establishes the implementation of an IRS-aided covert communication system utilizing a cooperative UAV, suitable for deployment in complex environments. Additionally, a closed-form expression for the Directly Emitted Power (DEP) of covert communication for the monitoring device has been derived, taking into account the uncertainty of transmit power. A joint optimization problem has been formulated to optimize the phases of the IRS units, the jamming power of the UAV, and the transmitting power of the transmitter, while satisfying constraints related to the optimal DEP of Willie, the transmit power of the transmitter, and the transmit power of the AN. Simulation results indicate that the system’s covertness and covert rate improve with an increased number of IRS units, extended UAV flight time, and higher interference power. Future research should also explore the deployment of this system in complex environments, focusing on the dynamic adjustment of the IRS phase units in conjunction with UAVs. -
1 基于SCA和Dinkelbach技术的交替优化算法
(1) 初始化,RB,0, $ \eta $和迭代索引参数k=1; (2) 利用式(26)得到最优$ {\boldsymbol{\varTheta}} $。 (3) 重复 (4) 通过得到$ \left( {{{\boldsymbol{Q}}_{k - 1}},{\boldsymbol{\varTheta}} } \right) $,解决式(33)更新$ \left( {{P_k},{{\hat P}_{{\text{U}},k}}} \right) $; (5) 根据求出的$ \left( {{P_k},{{\hat P}_{{\text{U}},k}}} \right) $,利用式(31)更新因子$ \eta $; (6) 通过得到的$ \left( {{\boldsymbol{\varTheta}} ,{P_k},{{\hat P}_{{\text{U}},k}}} \right) $,利用式(24a)更新RB,k; (7) 设置k$ \leftarrow $k+1; (8) 直到$ \left| {{R_{{\mathrm{B}},k}} - {R_{{\mathrm{B}},k - 1}}} \right| \le \kappa $。  下载: 导出CSV
下载: 导出CSV
表 1 仿真的具体参数设置
参数 参数描述 取值 N 无人机飞行时间 30 s T 无人机飞行时隙个数 30 L 每个时隙持续时间 1 s H 无人机的固定飞行高度 50 m M 智能反射面反射单元个数 30 Vmax 无人机的最大飞行速度 50 m/s D 无人机每个时隙最大移动距离 50 m β0 信道距离为1米时的信道增益 –50 dB $ \alpha $ 路径损耗指数 2.2 D 天线间距 $ {\lambda \mathord{\left/ {\vphantom {\lambda 2}} \right. } 2} $ Pmax Alice的发射功率上限 1 W $ {\hat P_{{\text{U}},\max }} $ 无人机的最大AN功率上限 1 W $ \sigma _{\text{W}}^2 $ Willie处噪声功率方差 –120 dBm $ \sigma _{\text{B}}^2 $ Bob处噪声功率方差 –120 dBm $ \varepsilon $ Willie确定所需隐蔽性的特定值 0.01 $ \kappa $ 循环阈值 10–5 wB Bob的地面坐标(m) [–100,100]T wW Willie的地面坐标(m) [100,100]T wA 基站的地面坐标(m) [–100,0]T qA 无人机起点坐标(m) [–300,20]T qF 无人机终点坐标(m) [300,20]T
下载: 导出CSV
-
[1] YAN Shihao, ZHOU Xiangyun, HU Jinsong, et al. Low probability of detection communication: Opportunities and challenges[J]. IEEE Wireless Communications, 2019, 26(5): 19–25. doi: 10.1109/MWC.001.1900057. [2] BASH B A, GOECKEL D, and TOWSLEY D. Limits of reliable communication with low probability of detection on AWGN channels[J]. IEEE Journal on Selected Areas in Communications, 2013, 31(9): 1921–1930. doi: 10.1109/JSAC.2013.130923. [3] 王承祥, 黄杰, 王海明, 等. 面向6G的无线通信信道特性分析与建模[J]. 物联网学报, 2020, 4(1): 19–32. doi: 10.11959/j.issn.2096-3750.2020.00155.WANG Chengxiang, HUANG Jie, WANG Haiming, et al. 6G oriented wireless communication channel characteristics analysis and modeling[J]. Chinese Journal on Internet of Things, 2020, 4(1): 19–32. doi: 10.11959/j.issn.2096-3750.2020.00155. [4] KONG J, DAGEFUS F T, CHOI J, et al. Intelligent reflecting surface assisted covert communication with transmission probability optimization[J]. IEEE Wireless Communications Letters, 2021, 10(8): 1825–1829. doi: 10.1109/LWC.2021.3082841. [5] ZHOU Xiaobo, YAN Shihao, WU Qingqing, et al. Joint transmit power and reflection beamforming design for IRS-aided covert communications[C]. 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 2021: 1–6. doi: 10.1109/GLOBECOM46510.2021.9685483. [6] DONG Limeng and WANG Huiming. Secure MIMO transmission via intelligent reflecting surface[J]. IEEE Transactions on Wireless Communications 2020, 9(6): 787–790. doi: 10.1109/TWC.2020.3012721. [7] CHEN Xin, ZHENG Tongxing, DONG Limeng, et al. Enhancing MIMO covert communications via intelligent reflecting surface[J]. IEEE Wireless Communications Letters, 2022, 11(1): 33–37. doi: 10.1109/LWC.2021.3119687. [8] LV Lu, WU Qingqing, LI Zan, et al. Achieving covert communication by IRS-NOMA[C]. 2021 IEEE/CIC International Conference on Communications in China (ICCC), Xiamen, China, 2021: 421–426. doi: 10.1109/ICCC52777.2021.9580320. [9] LV Lu, WU Qingqing, LI Zan, et al. Covert communication in intelligent reflecting surface-assisted NOMA systems: Design, analysis, and optimization[J]. IEEE Transactions on Wireless Communications, 2022, 21(3): 1735–1750. doi: 10.1109/TWC.2021.3106346. [10] WU Yingjie, WANG Shilian, LUO Junshan, et al. Passive covert communications based on reconfigurable intelligent surface[J]. IEEE Wireless Communications Letters, 2022, 11(11): 2445–2449. doi: 10.1109/LWC.2022.3206229. [11] 徐勇军, 高正念, 王茜竹, 等. 基于智能反射面辅助的无线供电通信网络鲁棒能效最大化算法[J]. 电子与信息学报, 2022, 44(7): 2317–2324. doi: 10.11999/JEIT210714.XU Yongjun, GAO Zhengnian, WANG Qianzhu, et al. Robust energy efficiency maximization algorithm for intelligent reflecting surface-aided wireless powered-communication networks[J]. Journal of Electronics & Information Technology, 2022, 44(7): 2317–2324. doi: 10.11999/JEIT210714. [12] ZENG Yong, ZHANG Rui, and LIM T J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges[J]. IEEE Communications Magazine, 2016, 54(5): 36–42. doi: 10.1109/MCOM.2016.7470933. [13] WANG Haichao, WANG Jinlong, CHEN Jin, et al. Network-connected UAV communications: Potentials and challenges[J]. China Communications, 2018, 15(12): 111–121. doi: 10.12676/j.cc.2018.12.009. [14] LIU Xuemin, SONG Yaoliang, CHEN Kuiyu, et al. Modulation recognition of low-SNR UAV radar signals based on bispectral slices and GA-BP neural network[J]. Drones, 2023, 7(7): 472. doi: 10.3390/drones7070472. [15] ZHOU Xiaobo, YAN Shihao, HU Jinsong, et al. Joint optimization of a UAV's trajectory and transmit power for covert communications[J]. IEEE Transactions on Signal Processing, 2019, 67(16): 4276–4290. doi: 10.1109/TSP.2019.2928949. [16] JIANG Xu, YANG Zhutian, ZHAO Nan, et al. Resource allocation and trajectory optimization for UAV-enabled multi-user covert communications[J]. IEEE Transactions on Vehicular Technology, 2021, 70(2): 1989–1994. doi: 10.1109/TVT.2021.3053936. [17] CHEN Xinying, CHANG Zheng, TANG Jie, et al. UAV-aided multi-antenna covert communication against multiple wardens[C]. The ICC 2021-IEEE International Conference on Communications, Montreal, Canada, 2021: 1–6. doi: 10.1109/ICC42927.2021.9500951. [18] ZHENG Tongxing, YANG Ziteng, WANG Chao, et al. Wireless covert communications aided by distributed cooperative jamming over slow fading channels[J]. IEEE Transactions on Wireless Communications, 2021, 20(11): 7026–7039. doi: 10.1109/TWC.2021.3080382. [19] DU Hongyang, NIYATO D, XIE Yuanai, et al. Covert communication for jammer-aided multi-antenna UAV networks[C]. The ICC 2022 - IEEE International Conference on Communications, Seoul, Korea, 2022: 91–96. doi: 10.1109/ICC45855.2022.9838318. [20] ZHANG Ran, CHEN Xinying, LIU Mingqian, et al. UAV relay assisted cooperative jamming for covert communications over Rician fading[J]. IEEE Transactions on Vehicular Technology, 2022, 71(7): 7936–7941. doi: 10.1109/TVT.2022.3164051. [21] 周小波, 于辉, 彭旭, 等. 智能反射面辅助及人工噪声增强的无线隐蔽通信[J]. 电子与信息学报, 2022, 44(7): 2392–2399. doi: 10.11999/JEIT211618.ZHOU Xiaobo, YU Hui, PENG Xu, et al. Wireless covert communications based on intelligent reflecting surface aided and artificial noise enhanced[J]. Journal of Electronics & Information Technology, 2022, 44(7): 2392–2399. doi: 10.11999/JEIT211618. [22] WU Chaoyi, YAN Shihao, ZHOU Xiaobo, et al. Intelligent reflecting surface (IRS)-aided covert communication with warden’s statistical CSI[J]. IEEE Wireless Communications Letters, 2021, 10(7): 1449–1453. doi: 10.1109/LWC.2021.3069778. -

 下载:
下载:





图(4) / 表(2)
计量
- 文章访问数: 1481
- HTML全文浏览量: 655
- PDF下载量: 156
- 被引次数: 0
