

Low-Rank Regularized Joint Sparsity Modeling for Image Denoising
-
摘要: 非局部稀疏表示模型,如联合稀疏(JS)模型、低秩(LR)模型和组稀疏表示(GSR)模型,通过有效利用图像的非局部自相似(NSS)属性,在图像去噪研究中展现出巨大的潜力。流行的基于字典的JS算法在其目标函数中利用松驰的凸惩罚,避免了NP-hard稀疏编码,但只能得到近似的稀疏表示。这种近似的JS模型未能对潜在的图像数据施加低秩性,从而导致图像去噪质量降低。该文提出一种新颖的低秩正则联合稀疏(LRJS)模型,用于求解图像去噪问题。提出的LRJS模型同时利用非局部相似块的LR和JS先验信息,可以增强非局部相似块之间的相关性(即低秩性),从而可以更好地抑制噪声,提升去噪图像的质量。为了提高优化过程的可处理性和鲁棒性,该文设计了一种具有自适应参数调整策略的交替最小化算法来求解目标函数。在两个图像去噪问题(包括高斯噪声去除和泊松噪声去除)上的实验结果表明,提出的LRJS方法在客观度量和视觉感知上均优于许多现有的流行或先进的图像去噪算法,特别是在处理具有高度自相似性的图像数据时表现更为出色。提出的LRJS图像去噪算法的源代码通过以下链接下载:
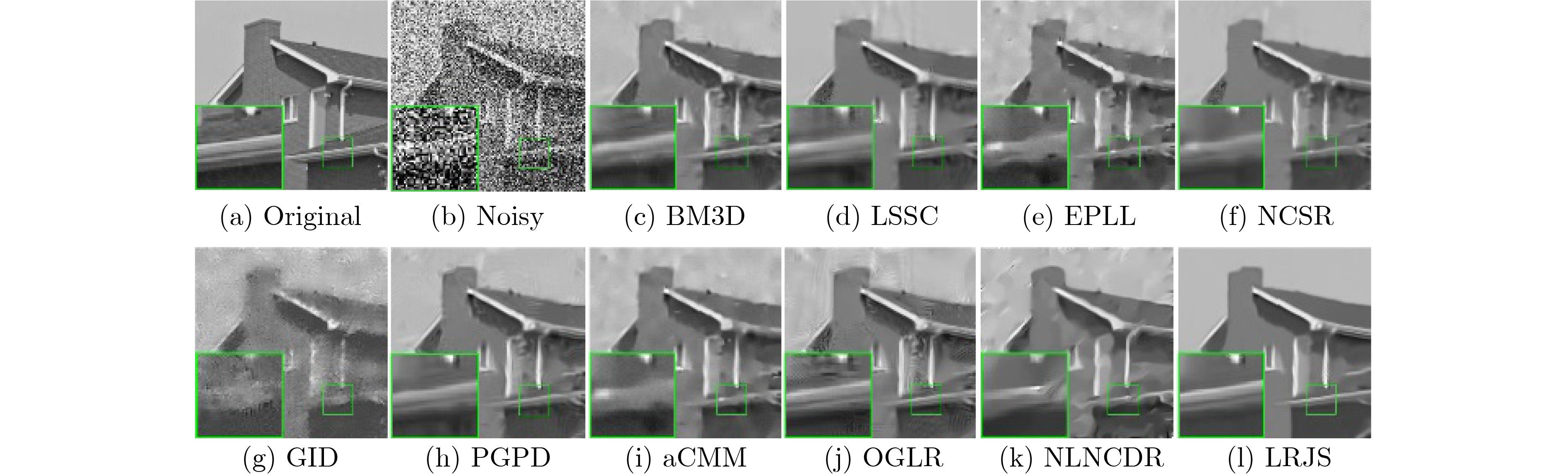
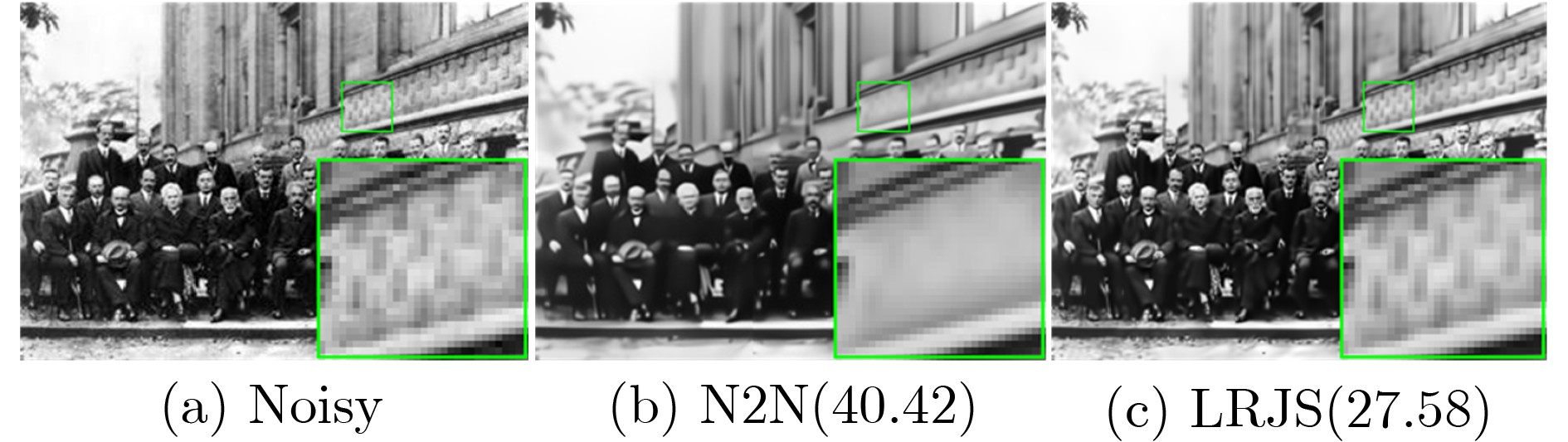
https://pan.baidu.com/s/14bt6u94NBTZXxhWjBHxn6A?pwd=1234 ,提取码:1234。Abstract:Objective Image denoising aims to reduce unwanted noise in images, which has been a long-standing issue in imaging science. Noise significantly degrades image quality, affecting their use in applications such as medical imaging, remote sensing, and image reconstruction. Over recent decades, various image prior models have been developed to address this problem, focusing on different image characteristics. These models, utilizing priors like sparsity, Low-Rankness (LR), and Nonlocal Self-Similarity (NSS), have proven highly effective. Nonlocal sparse representation models, including Joint Sparsity (JS), LR, and Group Sparse Representation (GSR), effectively leverage the NSS property of images. They capture the structural similarity of image patches, even when spatially distant. Popular dictionary-based JS algorithms use a relaxed convex penalty to avoid NP-hard sparse coding, leading to an approximately sparse representation. However, these approximations fail to enforce LR on the image data, reducing denoising quality, especially in cases of complex noise patterns or high self-similarity. This paper proposes a novel Low-Rank Regularized Joint Sparsity (LRJS) model for image denoising, integrating the benefits of LR and JS priors. The LRJS model enhances denoising performance, particularly where traditional methods underperform. By exploiting the NSS in images, the LRJS model better preserves fine details and structures, offering a robust solution for real-world applications. Methods The proposed LRJS model integrates low-rank and JS priors to enhance image denoising performance. By exploiting the NSS property of images, the LRJS model strengthens the dependency between nonlocal similar patches, improving image structure representation and noise suppression. The low-rank prior reflects the smoothness and regularity inherent in the image, whereas the JS prior captures the sparsity of the image patches. Incorporating these priors ensures a more accurate representation of the underlying clean image, enhancing denoising performance. An alternating minimization algorithm is proposed to solve this optimization problem, alternating between the low-rank and JS terms to simplify the optimization process. Additionally, an adaptive parameter adjustment strategy dynamically tunes the regularization parameters, balancing LR and sparsity throughout the optimization. The LRJS model offers an effective approach for image denoising by combining low-rank and JS priors, solved using an alternating minimization framework with adaptive parameter tuning. Results and Discussions Experimental results on two image denoising tasks, Gaussian noise removal ( Fig. 4 ,Fig. 5 ,Table 1 ,Table 2 ) and Poisson denoising (Fig. 6 ,Table 3 ), demonstrate that the proposed LRJS method outperforms several popular and state-of-the-art denoising algorithms in both objective metrics and visual perceptual quality, particularly for images with high self-similarity. In Gaussian noise removal, the LRJS method achieves significant improvements, especially with highly self-similar images. This improvement results from LRJS effectively leveraging the NSS prior, which strengthens the dependencies among similar patches, leading to better noise suppression while preserving image details. Compared with other methods, LRJS demonstrates greater robustness, particularly in retaining fine details and structures often lost with traditional denoising techniques. For Poisson denoising, the LRJS method also yields notable performance gains. It better manages the complexity of Poisson noise compared with other approaches, highlighting its versatility and robustness across different noise types. The visual quality of the denoised images shows fewer artifacts and more accurate recovery of details. Quantitative results in terms of PSNR and SSIM further validate the effectiveness of LRJS, positioning it as a competitive solution in image denoising. Overall, these experimental findings confirm that LRJS offers a reliable and effective approach, particularly for images with high self-similarity and complex noise models.Conclusions The LRJS model proposed in this paper improves image denoising performance by combining LR and JS priors. This dual-prior framework better captures the underlying image structure while suppressing noise, particularly benefiting images with high self-similarity. Experimental results demonstrate that the LRJS method not only outperforms traditional denoising techniques but also exceeds many state-of-the-art algorithms in both objective metrics and visual quality. By leveraging the NSS property of image patches, the LRJS model enhances the dependencies among similar patches, making it particularly effective for tasks requiring the preservation of fine details and structures. The LRJS method significantly enhances the quality of denoised images, especially in complex noise scenarios such as Gaussian and Poisson noise. Its robust alternating minimization algorithm with adaptive parameter adjustment ensures effective optimization, contributing to superior performance. The results further highlight the LRJS model’s ability to preserve image edges, textures, and other fine details often degraded in other denoising algorithms. Compared with existing techniques, the LRJS method demonstrates superior performance in handling high noise levels while maintaining image clarity and detail, making it a promising tool for applications such as medical imaging, remote sensing, and image restoration. Future research could focus on optimizing the model for more complex noise environments, such as mixed noise or real-world noise that is challenging to model. Additionally, exploring more efficient algorithms and integrating advanced techniques, such as deep learning, may further improve the LRJS model’s capability and applicability to diverse denoising tasks. -
1 基于LRJS的高斯噪声去除算法
输入:噪声图像$ {\boldsymbol{y}} $。 初始化:$ {\sigma _n} $, $ {\hat {\boldsymbol{x}}^0} = {\boldsymbol{y}} $, $ {{\boldsymbol{y}}^0} = {\boldsymbol{y }}$。 For $ k = 1 $ do 迭代正则调整: $ {\boldsymbol{{y}}^k} = {\hat {\boldsymbol{x}}^{(k - 1)}} + \gamma ({\boldsymbol{y}} - {\hat {\boldsymbol{x}}^{(k - 1)}}) $。 更新噪声标准差$ {\sigma _e} $通过式(26)。 For 噪声图像$ {\boldsymbol{y}} $中每个块$ {y_i} $ do 收集相似块生成一个组$ {{\boldsymbol{Y}}_i} $。 使用PCA从组$ {{\boldsymbol{Y}}_i} $中学习一个字典$ {{\boldsymbol{D}}_i} $。 获得组稀疏$ {{\boldsymbol{A}}_i} $通过计算$ {{\boldsymbol{A}}_i} = {\boldsymbol{D}}_i^{\mathrm{T}}{{\boldsymbol{Y}}_i} $。 对组稀疏$ {{\boldsymbol{A}}_i} $执行SVD:$ [{{\boldsymbol{U}}_i},{\Delta _i},{{\boldsymbol{V}}_i}] = {\text{SVD}}({{\boldsymbol{A}}_i}) $。 更新参数$ \mu $通过计算式(25)。 更新参数$ \tau $通过计算式(28)。 估计LR矩阵$ {\hat {\boldsymbol{L}}_i} $通过计算式(9)。 更新参数$ \eta $通过计算式(25)。 更新参数$ \lambda $通过计算式(28)。 估计组稀疏系数$ {\hat {\boldsymbol{A}}_i} $通过计算式(5)。 End for 估计噪声图像$ \hat {\boldsymbol{x}} $通过计算式(13)。 End for 输出:最终的去噪图像$ \hat {\boldsymbol{x}} $。  下载: 导出CSV
下载: 导出CSV
2 基于LRJS的泊松噪声去除算法
输入:噪声图像${\boldsymbol{ y}} $。 初始化:估计$ {\sigma _n} $通过计算式(27),$ {\hat {\boldsymbol{x}}^0} = {\boldsymbol{y}} $,$ {{\boldsymbol{y}}^0} = {\boldsymbol{y}} $。 For $ k = 1 $ do 迭代正则调整: $ {{\boldsymbol{y}}^k} = {\hat {\boldsymbol{x}}^{(k - 1)}} + \gamma ({\boldsymbol{y}} - {\hat {\boldsymbol{x}}^{(k - 1)}}) $。 更新噪声标准差$ {\sigma _e} $通过式(26)。 For 噪声图像$ {\boldsymbol{y}} $中每个块$ {y_i} $ do 收集相似块生成一个组$ {{\boldsymbol{Y}}_i} $。 使用PCA从组$ {{\boldsymbol{Y}}_i} $中学习一个字典$ {{\boldsymbol{D}}_i} $。 获得组稀疏$ {{\boldsymbol{A}}_i} $通过计算$ {{\boldsymbol{A}}_i} = {\boldsymbol{D}}_i^{\mathrm{T}}{{\boldsymbol{Y}}_i} $。 对组稀疏$ {{\boldsymbol{A}}_i} $执行SVD:$ [{{\boldsymbol{U}}_i},{\Delta _i},{{\boldsymbol{V}}_i}] = {\text{SVD}}({{\boldsymbol{A}}_i}) $。 更新参数$ \mu $通过计算式(25)。 更新参数$ \tau $通过计算式(28)。 估计LR矩阵$ {\hat {\boldsymbol{L}}_i} $通过计算式(9)。 更新参数$ \eta $通过计算式(25)。 更新参数$ \lambda $通过计算式(28)。 估计组稀疏系数$ {\hat {\boldsymbol{A}}_i} $通过计算式(5)。 End for 调用ADMM算法: 初始化:$ {\boldsymbol{g }}= {{\textit{0}}} $,${\boldsymbol{ z}} = {\hat {\boldsymbol{x}}^{(k)}} $。 更新$ \hat {\boldsymbol{z}} $通过计算式(21)。 更新$ \hat {\boldsymbol{x}} $通过计算式(24)。 更新$ \hat {\boldsymbol{g}} $通过计算式(20)。 End for 输出:最终的去噪图像$ \hat {\boldsymbol{x}} $。
下载: 导出CSV
表 1 不同方法用于高斯噪声去除的平均PSNR比较结果(dB)
$ {\sigma _{\boldsymbol{n}}} $ BM3D LSSC EPLL NCSR GID PGPD aGMM OGLR NLNCDR LRJS 20 31.20 31.36 30.72 31.26 30.25 31.30 31.04 31.05 30.44 31.56 40 27.53 27.77 27.16 27.66 26.65 27.79 27.37 27.69 27.04 28.02 75 24.66 24.56 24.01 24.47 23.20 24.71 24.17 24.41 24.02 24.90 100 23.30 23.09 22.66 23.00 21.56 23.36 22.81 22.69 22.72 23.62
下载: 导出CSV
表 2 不同方法测试Urban100数据集用于高斯噪声去除的平均PSNR比较结果(dB)
$ {\sigma _{\boldsymbol{n}}} $ BM3D NCSR PGPD OGLR Dn-CNN IRCNN FFDNet LRJS 10 33.39 33.66 33.40 32.94 33.83 33.65 33.42 34.25 20 29.50 29.68 29.47 29.27 29.75 29.64 29.61 30.16 30 27.33 27.39 27.19 27.18 27.44 27.40 27.49 27.85 40 25.44 25.77 25.70 25.67 25.86 25.90 26.03 26.28 50 24.55 24.59 24.59 24.51 24.77 24.75 24.93 25.07 平均 28.04 28.22 28.07 27.91 28.33 28.27 28.30 28.72
下载: 导出CSV
表 3 不同方法用于泊松噪声去除的平均PSNR比较结果(dB)
$ P $ TNRD Dn-CNN IRCNN LRPD LRS LRJS 5 19.50 22.31 22.78 21.66 22.23 23.56 10 23.58 23.22 24.67 23.63 24.61 25.44 15 24.11 25.47 25.81 24.29 25.93 26.54 20 24.40 25.95 26.54 25.39 26.83 27.44
下载: 导出CSV
表 4 消融学习:JS和提出的LRJS模型在Set12数据集上用于图像去噪的平均PSNR结果(dB)
高斯噪声去除 泊松噪声去除 $ {\sigma _{\boldsymbol{n}}} $ 10 20 30 40 50 75 100 平均 $ P $ 1 5 10 15 20 25 30 平均 JS 34.30 31.02 29.06 27.78 26.74 24.96 23.68 28.22 JS 19.37 23.65 25.10 26.29 27.01 27.58 27.93 25.28 LRJS 34.54 31.14 29.21 27.87 26.80 24.98 23.73 28.32 LRJS 20.07 23.86 25.40 26.41 27.14 27.69 28.09 25.52
下载: 导出CSV
-
[1] OSHER S, BURGER M, GOLDFARB D, et al. An iterative regularization method for total variation-based image restoration[J]. Multiscale Modeling & Simulation, 2005, 4(2): 460–489. doi: 10.1137/040605412. [2] AHARON M, ELAD M, and BRUCKSTEIN A. K-SVD: An algorithm for designing overcomplete dictionaries for sparse representation[J]. IEEE Transactions on Signal Processing, 2006, 54(11): 4311–4322. doi: 10.1109/TSP.2006.881199. [3] BUADES A, COLL B, and MOREL J M. A non-local algorithm for image denoising[C]. IEEE Conference on Computer Vision and Pattern Recognition, San Diego, USA, 2005: 60–65. doi: 10.1109/CVPR.2005.38. [4] ELAD M, KAWAR B, and VAKSMAN G. Image denoising: The deep learning revolution and beyond—a survey paper[J]. SIAM Journal on Imaging Sciences, 2023, 16(3): 1594–1654. doi: 10.1137/23M1545859. [5] 赵冬冬, 叶逸飞, 陈朋, 等. 基于残差和注意力网络的声呐图像去噪方法[J]. 光电工程, 2023, 50(6): 230017. doi: 10.12086/oee.2023.230017.ZHAO Dongdong, YE Yifei, CHEN Peng, et al. Sonar image denoising method based on residual and attention network[J]. Opto-Electronic Engineering, 2023, 50(6): 230017. doi: 10.12086/oee.2023.230017. [6] 周建新, 周凤祺. 基于改进协同量子粒子群的小波去噪分析研究[J]. 电光与控制, 2022, 29(1): 47–50. doi: 10.3969/j.issn.1671-637x.2022.01.010.ZHOU Jianxin and ZHOU Fengqi. Wavelet denoising analysis based on cooperative quantum-behaved particle swarm optimization[J]. Electronics Optics & Control, 2022, 29(1): 47–50. doi: 10.3969/j.issn.1671-637x.2022.01.010. [7] DABOV K, FOI A, KATKOVNIK V, et al. Image denoising by sparse 3-D transform-domain collaborative filtering[J]. IEEE Transactions on Image Processing, 2007, 16(8): 2080–2095. doi: 10.1109/TIP.2007.901238. [8] 罗亮, 冯象初, 张选德, 等. 基于非局部双边随机投影低秩逼近图像去噪算法[J]. 电子与信息学报, 2013, 35(1): 99–105. doi: 10.3724/SP.J.1146.2012.00819.LUO Liang, FENG Xiangchu, ZHANG Xuande, et al. An image denoising method based on non-local two-side random projection and low rank approximation[J]. Journal of Electronics & Information Technology, 2013, 35(1): 99–105. doi: 10.3724/SP.J.1146.2012.00819. [9] ZHANG Jian, ZHAO Debin, and GAO Wen. Group-based sparse representation for image restoration[J]. IEEE Transactions on Image Processing, 2014, 23(8): 3336–3351. doi: 10.1109/TIP.2014.2323127. [10] XU Jun, ZHANG Lei, ZUO Wangmeng, et al. Patch group based nonlocal self-similarity prior learning for image denoising[C]. IEEE International Conference on Computer Vision, Santiago, Chile, 2015: 244–252. doi: 10.1109/ICCV.2015.36. [11] ZHA Zhiyuan, YUAN Xin, WEN Bihan, et al. A benchmark for sparse coding: When group sparsity meets rank minimization[J]. IEEE Transactions on Image Processing, 2020, 29: 5094–5109. doi: 10.1109/TIP.2020.2972109. [12] MAIRAL J, BACH F, PONCE J, et al. Non-local sparse models for image restoration[C]. 12th IEEE International Conference on Computer Vision, Kyoto, Japan, 2009: 2272–2279. doi: 10.1109/ICCV.2009.5459452. [13] ZHANG Chengfang, ZHANG Ziyou, FENG Ziliang, et al. Joint sparse model with coupled dictionary for medical image fusion[J]. Biomedical Signal Processing and Control, 2023, 79: 104030. doi: 10.1016/j.bspc.2022.104030. [14] LI Chunzhi and CHEN Xiaohua. A staged approach with structural sparsity for hyperspectral unmixing[J]. IEEE Sensors Journal, 2023, 23(12): 13248–13260. doi: 10.1109/JSEN.2023.3270885. [15] ZHA Zhiyuan, WEN Bihan, YUAN Xin, et al. Low-rank regularized joint sparsity for image denoising[C]. IEEE International Conference on Image Processing, Anchorage, USA, 2021: 1644–1648. doi: 10.1109/ICIP42928.2021.9506726. [16] ZHANG Kai, ZUO Wangmeng, CHEN Yunjin, et al. Beyond a Gaussian denoiser: Residual learning of deep CNN for image denoising[J]. IEEE Transactions on Image Processing, 2017, 26(7): 3142–3155. doi: 10.1109/TIP.2017.2662206. [17] ZHANG Kai, ZUO Wangmeng, GU Shuhang, et al. Learning deep CNN denoiser prior for image restoration[C]. IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 2808–2817. doi: 10.1109/CVPR.2017.300. [18] ZHANG Kai, ZUO Wangmeng, and ZHANG Lei. FFDNet: Toward a fast and flexible solution for CNN-based image denoising[J]. IEEE Transactions on Image Processing, 2018, 27(9): 4608–4622. doi: 10.1109/TIP.2018.2839891. [19] ZHAO Mingchao, WEN Youwei, NG M, et al. A nonlocal low rank model for Poisson noise removal[J]. Inverse Problems and Imaging, 2021, 15(3): 519–537. doi: 10.3934/ipi.2021003. [20] CHEN Yunjin and PORK T. Trainable nonlinear reaction diffusion: A flexible framework for fast and effective image restoration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1256–1272. doi: 10.1109/TPAMI.2016.2596743. [21] ELAD M and YAVNEH I. A plurality of sparse representations is better than the sparsest one alone[J]. IEEE Transactions on Information Theory, 2009, 55(10): 4701–4714. doi: 10.1109/TIT.2009.2027565. [22] DONG Weisheng, ZHANG Lei, SHI Guangming, et al. Nonlocally centralized sparse representation for image restoration[J]. IEEE Transactions on Image Processing, 2013, 22(4): 1620–1630. doi: 10.1109/TIP.2012.2235847. [23] CHEN Yong, HE Wei, YOKOYA N, et al. Hyperspectral image restoration using weighted group sparsity-regularized low-rank tensor decomposition[J]. IEEE Transactions on Cybernetics, 2020, 50(8): 3556–3570. doi: 10.1109/TCYB.2019.2936042. [24] CAI Jianfeng, CANDÈS E J, and SHEN Zuowei. A singular value thresholding algorithm for matrix completion[J]. SIAM Journal on Optimization, 2010, 20(4): 1956–1982. doi: 10.1137/080738970. [25] KUMAR G P and SAHAY R R. Low rank Poisson denoising (LRPD): A low rank approach using split Bregman algorithm for Poisson noise removal from images[C]. IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, USA, 2019: 1907–1916. doi: 10.1109/CVPRW.2019.00242. [26] BOYD S, PARIKH N, CHU E, et al. Distributed optimization and statistical learning via the alternating direction method of multipliers[J]. Foundations and Trends® in Machine Learning, 2011, 3(1): 1–122. doi: 10.1561/2200000016. [27] WEN Youwei and CHAN R H. Parameter selection for total-variation-based image restoration using discrepancy principle[J]. IEEE Transactions on Image Processing, 2012, 21(4): 1770–1781. doi: 10.1109/TIP.2011.2181401. [28] ZORAN D and WEISS Y. From learning models of natural image patches to whole image restoration[C]. IEEE International Conference on Computer Vision, Barcelona, Spain, 2011: 479–486. doi: 10.1109/ICCV.2011.6126278. [29] TALEBI H and MILANFAR P. Global image denoising[J]. IEEE Transactions on Image Processing, 2014, 23(2): 755–768. doi: 10.1109/TIP.2013.2293425. [30] LUO Enming, CHAN S H, and NGUYEN T Q. Adaptive image denoising by mixture adaptation[J]. IEEE Transactions on Image Processing, 2016, 25(10): 4489–4503. doi: 10.1109/TIP.2016.2590318. [31] PANG Jiahao and CHEUNG G. Graph Laplacian regularization for image denoising: Analysis in the continuous domain[J]. IEEE Transactions on Image Processing, 2017, 26(4): 1770–1785. doi: 10.1109/TIP.2017.2651400. [32] LIU Haosen and TAN Shan. Image regularizations based on the sparsity of corner points[J]. IEEE Transactions on Image Processing, 2019, 28(1): 72–87. doi: 10.1109/TIP.2018.2862357. [33] HUANG Jiabin, SINGH A, and AHUJA N. Single image super-resolution from transformed self-exemplars[C]. IEEE Conference on Computer Vision and Pattern Recognition, Boston, USA, 2015: 5197–5206. doi: 10.1109/CVPR.2015.7299156. [34] AZZARI L and FOI A. Variance stabilization for noisy+estimate combination in iterative Poisson denoising[J]. IEEE Signal Processing Letters, 2016, 23(8): 1086–1090. doi: 10.1109/LSP.2016.2580600. [35] LEHTINEN J, MUNKBERG J, HASSELGREN J, et al. Noise2Noise: Learning image restoration without clean data[C]. Proceedings of the 35th International Conference on Machine Learning, Stockholm, Sweden, 2018: 2965–2974. [36] MITTAL A, MOORTHY A K, and BOVIK A C. No-reference image quality assessment in the spatial domain[J]. IEEE Transactions on Image Processing, 2012, 21(12): 4695–4708. doi: 10.1109/TIP.2012.2214050. -


 下载:
下载:







图(8) / 表(6)
计量
- 文章访问数: 1366
- HTML全文浏览量: 742
- PDF下载量: 123
- 被引次数: 0
