

Wireless Energy Harvest and Inter-Cluster Load Balancing-Enabled UAV-Assisted Data Scheduling and Trajectory Optimization Algorithms
-
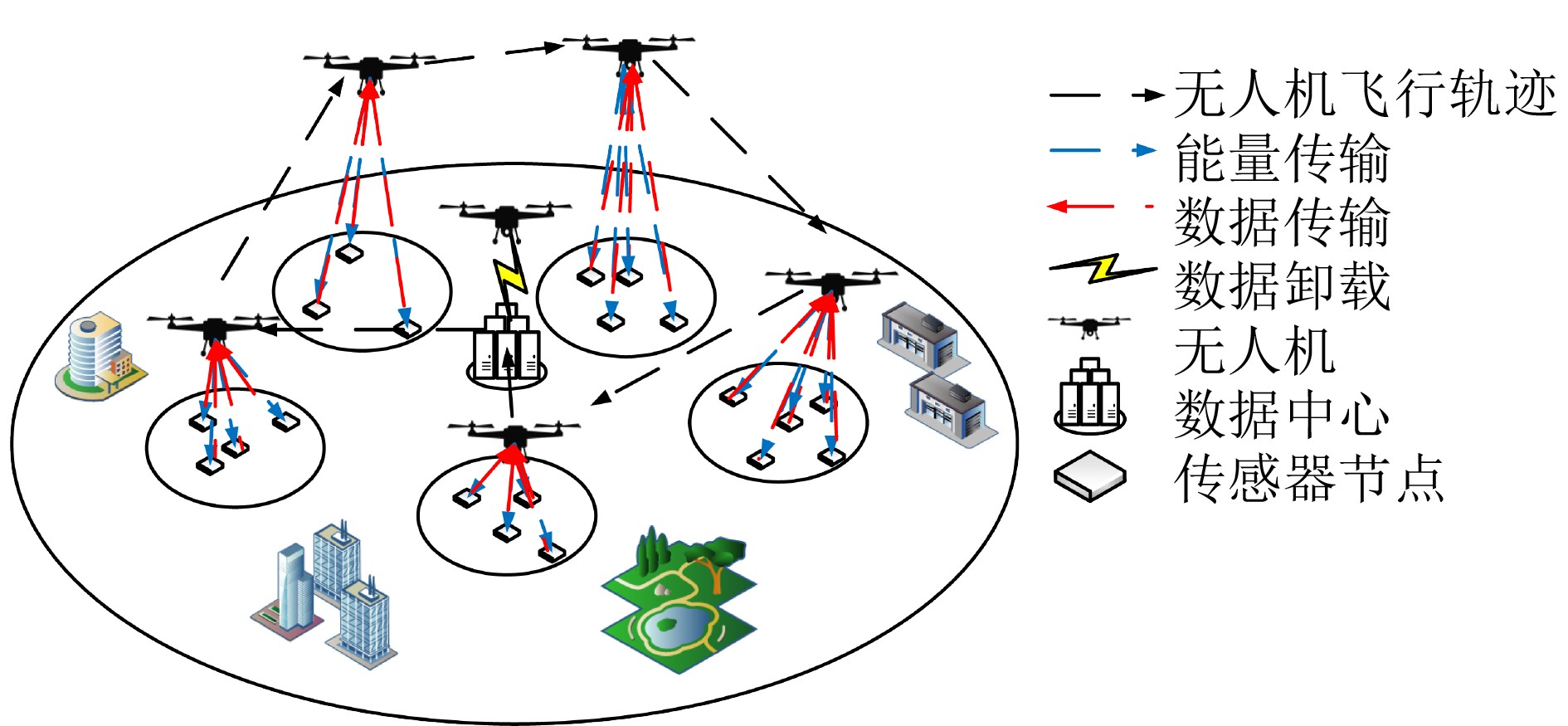
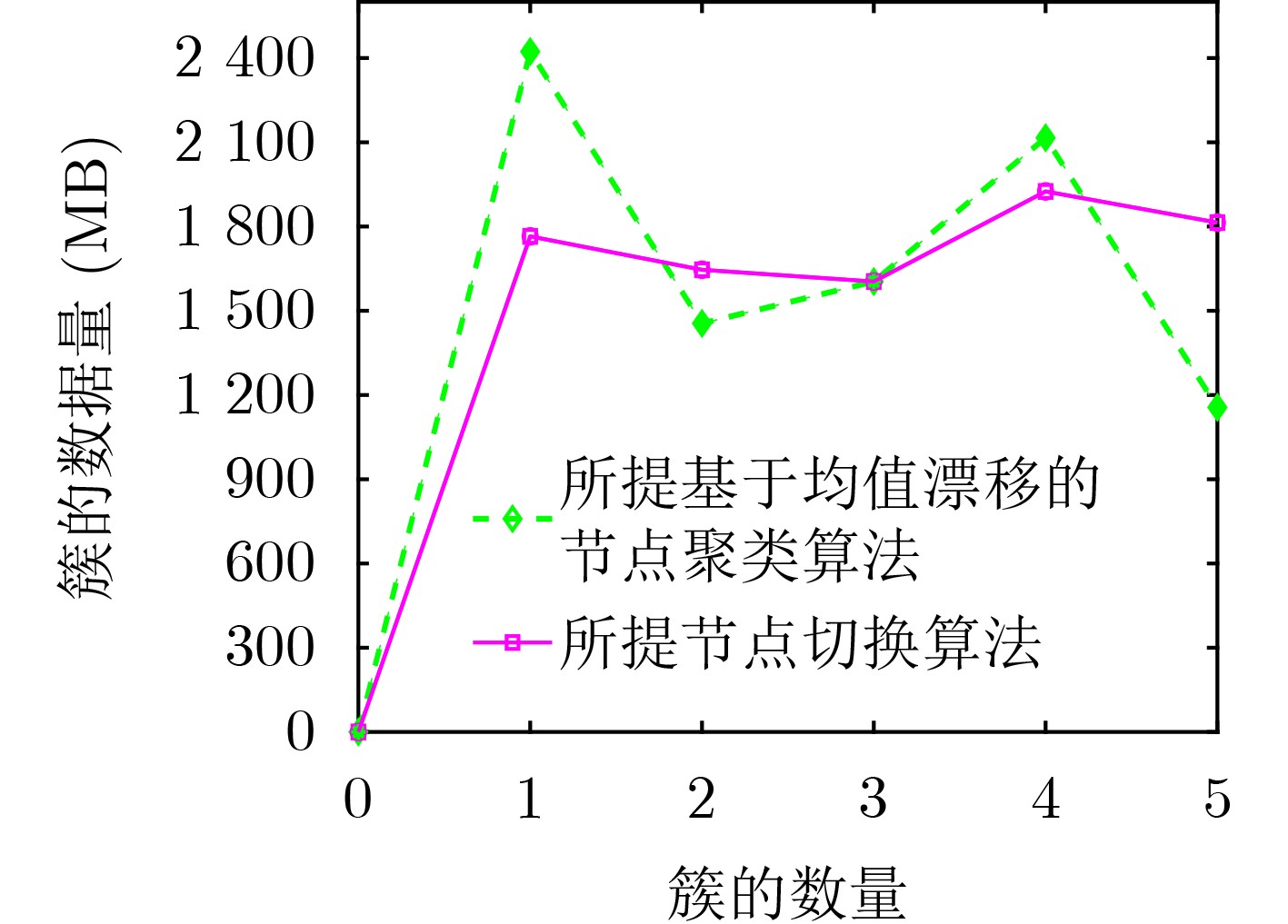
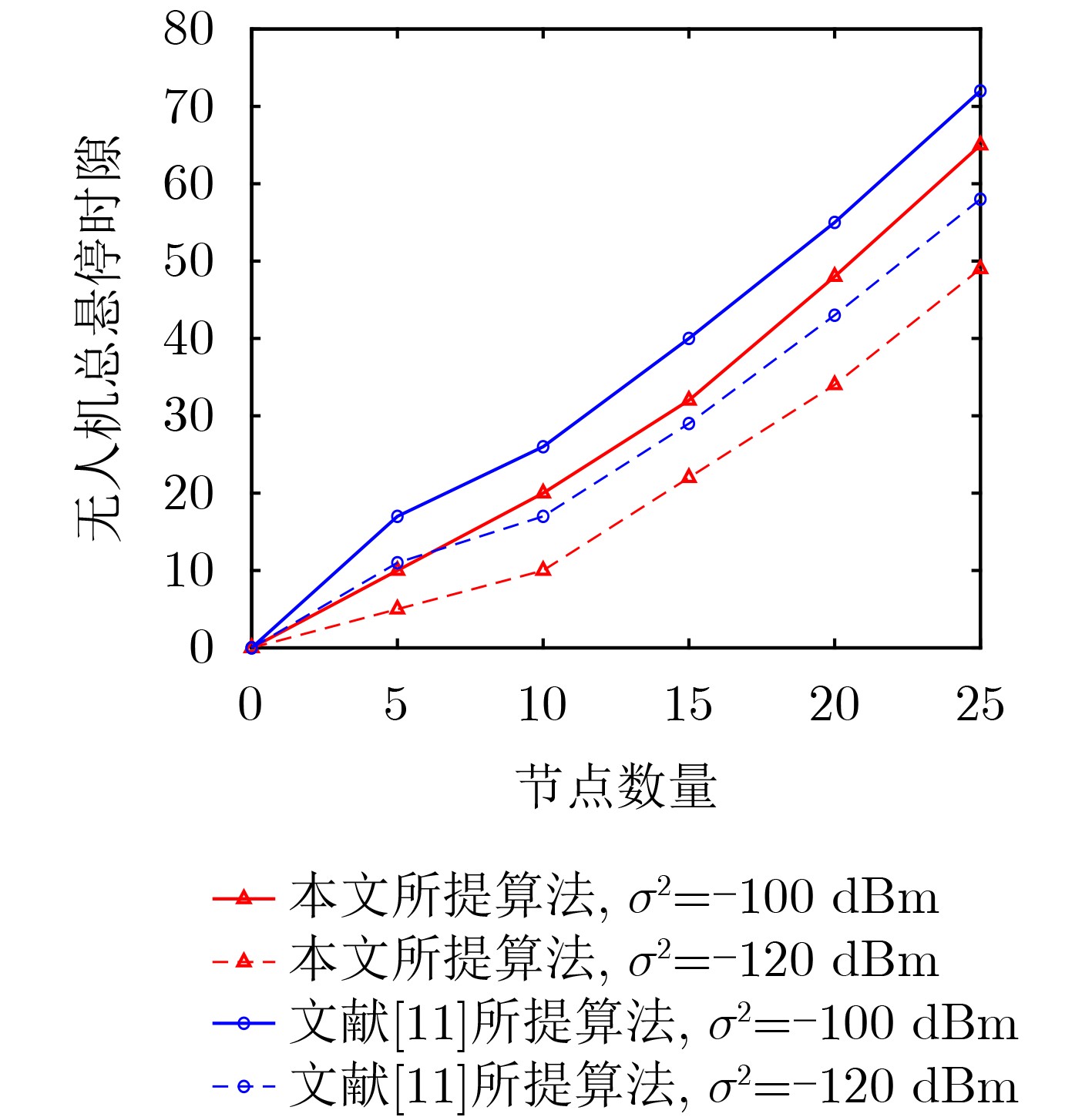
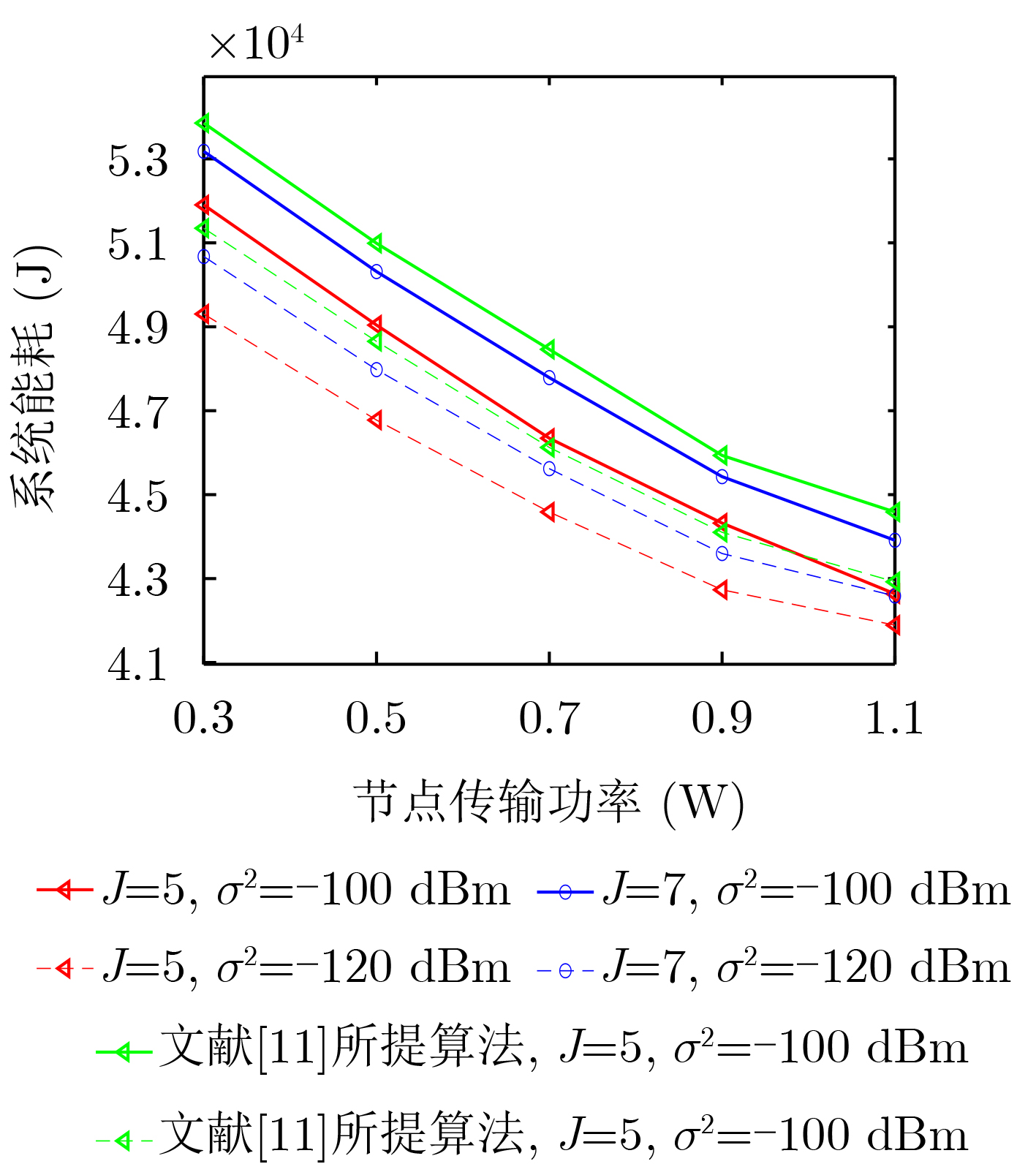
摘要: 该文研究了无人机(UAV)辅助无线传感器网络的数据收集问题。首先提出基于均值漂移算法的传感器节点(SN)初始分簇策略,进而以簇间负载均衡为目标,设计SN切换算法。基于所得成簇策略,将UAV数据收集及轨迹规划问题建模为系统能耗最小化问题。由于该问题是一个非凸问题,难以直接求解,将其分为两个子问题,即数据调度子问题及UAV轨迹规划子问题。针对数据调度子问题,提出一种基于多时隙库恩-蒙克雷斯算法的时频资源调度策略。针对UAV轨迹规划子问题,将其建模为马尔可夫决策过程,并提出一种基于深度Q网络的UAV轨迹规划算法。仿真结果验证了所提算法的有效性。Abstract: Data collection problem in an Unmanned Aerial Vehicle (UAV)-assisted wireless sensor network is addressed. Firstly, an initial Sensor Node (SN) clustering strategy is proposed based on the mean drift algorithm, then an SN switching algorithm is designed to achieve load balancing between clusters. Based on the obtained clustering strategy, the UAV data collection and trajectory planning problem is formulated as a system energy consumption minimization problem. Since the formulated problem is a non-convex problem and is difficult to solve directly, it is decoupled into two subproblems, namely data scheduling subproblem and UAV trajectory planning subproblem. To tackle the data scheduling subproblem, a multi-slot Kuhn-Munkres algorithm-based time-frequency resource scheduling strategy is proposed. To solve the UAV trajectory planning subproblem, the problem is modeled as a Markov decision-making process, and a deep Q-network-based algorithm is proposed. Simulation results verify the effectiveness of the proposed algorithm.
-
Key words:
- Unmanned aerial vehicle /
- Data collection /
- Trajectory planning /
- Markov decision process
-
表 1 仿真参数设置
仿真参数 数值 SN数据量$ {\varphi _k} $ [0, 1024 ] MB载波频率Cf [1, 3] GHz 节点可用带宽B 1 MHz SN发射功率pc 0.1 W UAV飞行高度H 70 m UAV飞行速度v 10 m/s UAV平均转子诱导速度v0 4.03 m/s 空气密度ρ 1.225 km/m3 转子盘面积Sr 0.503 m2  下载: 导出CSV
下载: 导出CSV
-
[1] 孙利民, 张书钦, 李志, 等. 无线传感器网络: 理论及应用[M]. 北京: 清华大学出版社, 2018: 5–18.SUN Limin, ZHANG Shuqin, LI Zhi, et al. Wireless Sensor Networks: Theory and Applications[M]. Beijing: Tsinghua University Press, 2018: 5–18. [2] ZENG Yong, ZHANG Rui, and LIM T J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges[J]. IEEE Communications Magazine, 2016, 54(5): 36–42. doi: 10.1109/MCOM.2016.7470933. [3] WEI Zhiqing, ZHU Mingyue, ZHANG Ning, et al. UAV-assisted data collection for Internet of things: A survey[J]. IEEE Internet of Things Journal, 2022, 9(17): 15460–15483. doi: 10.1109/JIOT.2022.3176903. [4] AHANI G, YUAN Di, and ZHAO Yixin. Age-optimal UAV scheduling for data collection with battery recharging[J]. IEEE Communications Letters, 2021, 25(4): 1254–1258. doi: 10.1109/LCOMM.2020.3047909. [5] SAMIR M, ASSI C, SHARAFEDDINE S, et al. Online altitude control and scheduling policy for minimizing AoI in UAV-assisted IoT wireless networks[J]. IEEE Transactions on Mobile Computing, 2022, 21(7): 2493–2505. doi: 10.1109/TMC.2020.3042925. [6] LUAN Qiuji, CUI Hongyan, ZHANG Lifeng, et al. A hierarchical hybrid subtask scheduling algorithm in UAV-assisted MEC emergency network[J]. IEEE Internet of Things Journal, 2022, 9(14): 12737–12753. doi: 10.1109/JIOT.2021.3138263. [7] ZHU Botao, BEDEER E, NGUYEN H H, et al. UAV trajectory planning for AoI-minimal data collection in UAV-aided IoT networks by transformer[J]. IEEE Transactions on Wireless Communications, 2023, 22(2): 1343–1358. doi: 10.1109/TWC.2022.3204438. [8] INDU, SINGH R P, CHOUDHARY H R, et al. Trajectory design for UAV-to-ground communication with energy optimization using genetic algorithm for agriculture application[J]. IEEE Sensors Journal, 2021, 21(16): 17548–17555. doi: 10.1109/JSEN.2020.3046463. [9] CHEN Jinchao, DU Chenglie, ZHANG Ying, et al. A clustering-based coverage path planning method for autonomous heterogeneous UAVs[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 25546–25556. doi: 10.1109/TITS.2021.3066240. [10] SHEN Kun, SHIVGAN R, MEDINA J, et al. Multidepot drone path planning with collision avoidance[J]. IEEE Internet of Things Journal, 2022, 9(17): 16297–16307. doi: 10.1109/JIOT.2022.3151791. [11] MA Ting, ZHOU Haibo, QIAN Bo, et al. UAV-LEO integrated backbone: A ubiquitous data collection approach for B5G internet of remote things networks[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3491–3505. doi: 10.1109/JSAC.2021.3088626. [12] YUAN Xiaopeng, HU Yulin, ZHANG Jian, et al. Joint user scheduling and UAV trajectory design on completion time minimization for UAV-aided data collection[J]. IEEE Transactions on Wireless Communications, 2023, 22(6): 3884–3898. doi: 10.1109/TWC.2022.3222067. [13] LIU Wentao, LI Dong, LIANG Tianhao, et al. Joint trajectory and scheduling optimization for age of synchronization minimization in UAV-assisted networks with random updates[J]. IEEE Transactions on Communications, 2023, 71(11): 6633–6646. doi: 10.1109/TCOMM.2023.3297198. [14] CHAI Shuqi and LAU V K N. Multi-UAV trajectory and power optimization for cached UAV wireless networks with energy and content recharging-demand driven deep learning approach[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(10): 3208–3224. doi: 10.1109/JSAC.2021.3088694. [15] WANG Jun, NA Zhenyu, and LIU Xin. Collaborative design of multi-UAV trajectory and resource scheduling for 6G-enabled Internet of things[J]. IEEE Internet of Things Journal, 2021, 8(20): 15096–15106. doi: 10.1109/JIOT.2020.3031622. -

 下载:
下载:



图(5) / 表(1)
计量
- 文章访问数: 911
- HTML全文浏览量: 414
- PDF下载量: 63
- 被引次数: 0
