

Sonar Image Underwater Target Recognition: A Comprehensive Overview and Prospects
-
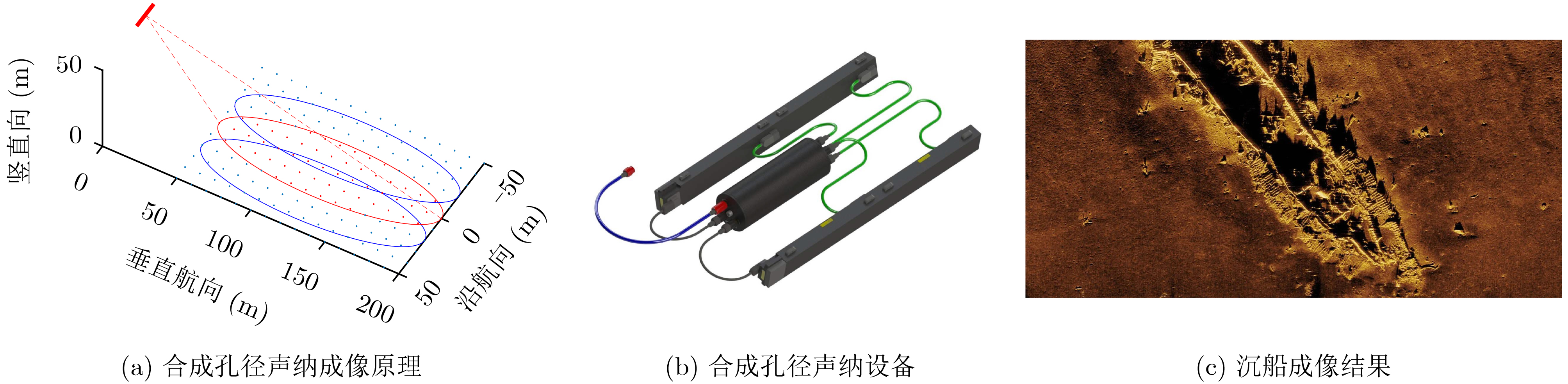
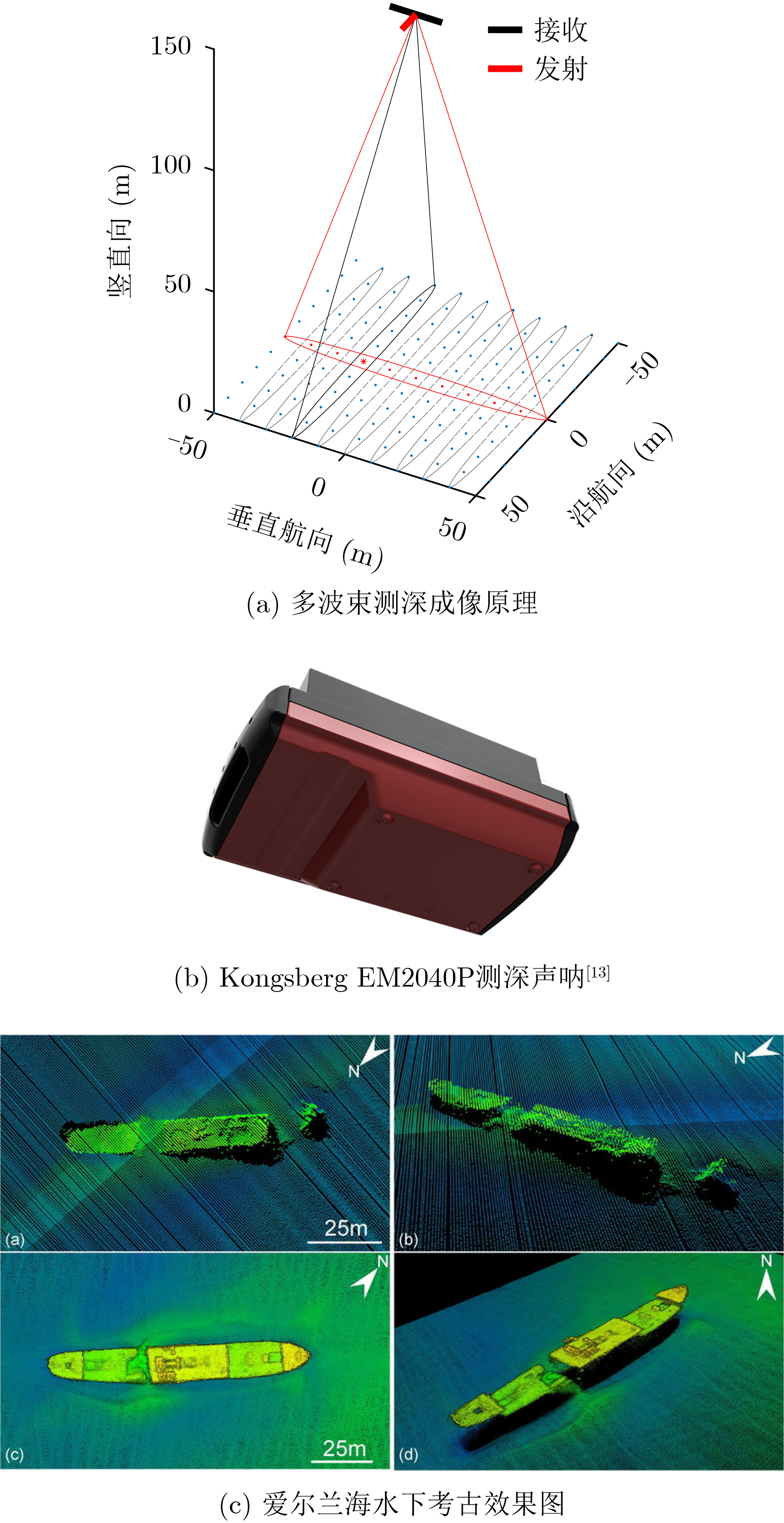
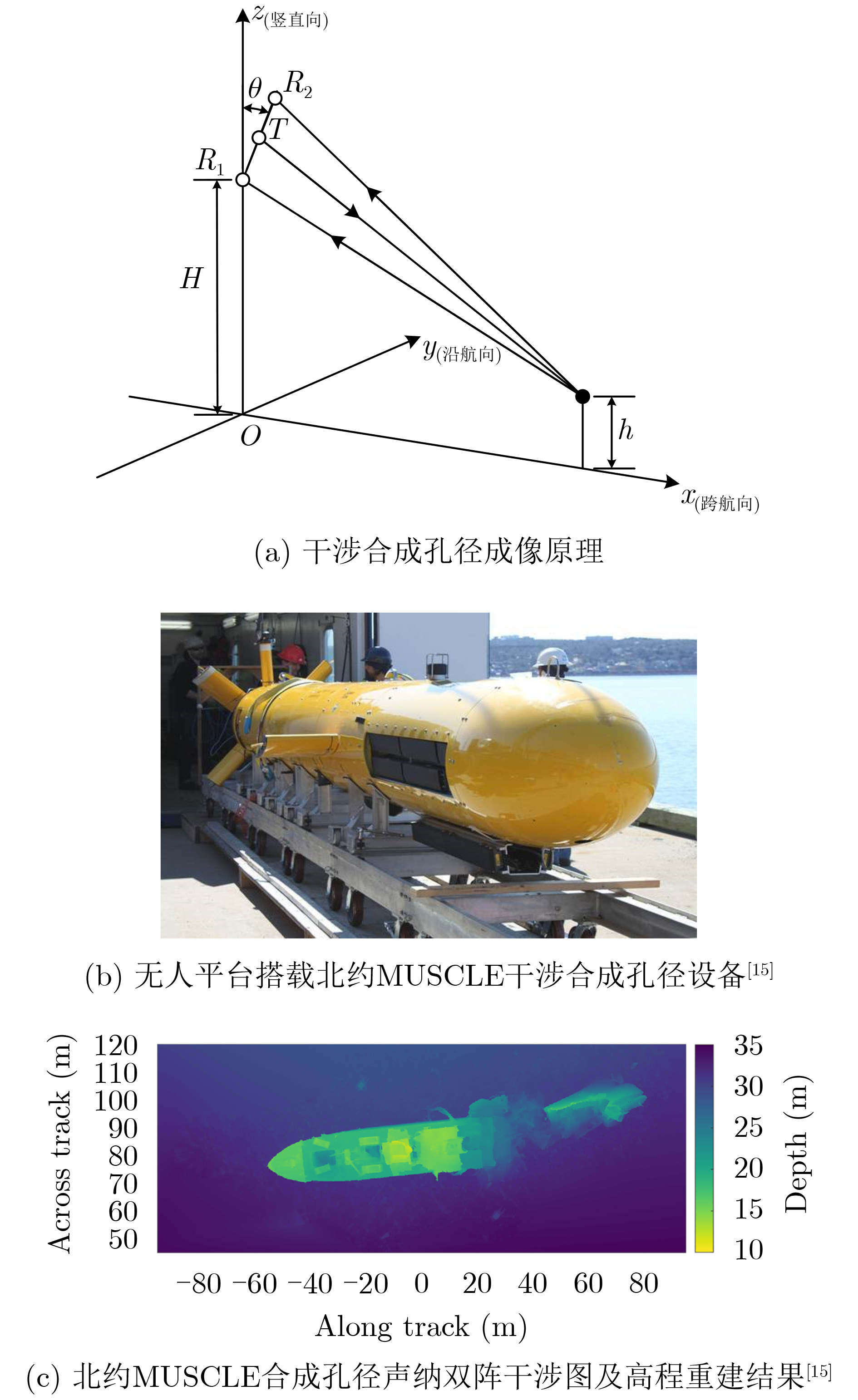
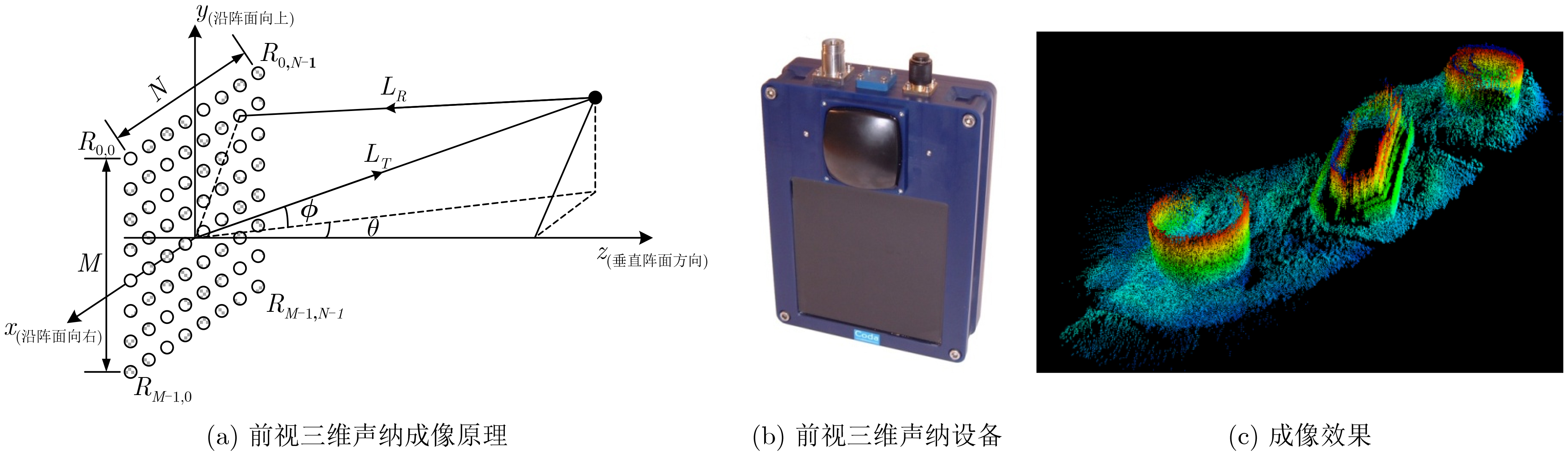
摘要: 随着海洋资源开发和水下作业的增加,声呐图像水下目标识别已成为热门研究领域。该文全面回顾了该领域的现状和未来趋势。首先,强调了声呐图像水下目标识别的背景和重要性,指出水下环境复杂和样本稀缺增加了任务难度。其次,深入探讨了典型的成像声呐技术,包括前视声呐、侧扫声呐、合成孔径声呐、多波束测深仪、干涉合成孔径声呐和前视三维声呐等。接下来,系统地审视了二维和三维声呐图像水下目标识别方法,比较了不同算法的优劣,还讨论了声呐图像序列的关联识别方法。最后,总结了当前领域的主要挑战,展望了未来研究方向,旨在促进水下声呐目标识别领域的发展。Abstract: With the increasing development of marine resources and underwater operations, sonar image-based underwater target recognition has become a hot research area. This article provides a comprehensive review of the current status and future trends in this field. Initially, the background and significance of sonar image-based underwater target recognition are emphasized, noting that the complexity of the underwater environment and the scarcity of samples increase the task difficulty. Subsequently, typical imaging sonar technologies are delved, including forward-looking sonar, side-scan sonar, synthetic aperture sonar, multibeam echo sounder, interferometric synthetic aperture sonar, and forward-looking 3D sonar. Following that, 2D and 3D sonar image-based underwater target recognition methods are systematically examined, the strengths and weaknesses of different algorithms are compared, and methods for the correlated recognition of sonar image sequences are discussed. Finally, the major challenges in the current field and future research directions are summarized, aiming to foster the development of the underwater sonar target recognition field.
-
表 1 二维声呐图像目标识别方法比较
类别 文献索引 优点 缺点 传统识别方法 模板匹配[25–28] 计算速度快,不需要训练数据 需要目标先验知识 多源/多特征[30–38] 性能优于单源数据 数据差异大,易误判;特征维数过高易性能下降 统计分析[39–41] 不需要训练数据 模型与数据不匹配时,性能下降 深度学习分类 小型网络[42] 对数据需求小 性能不高 迁移学习[43–49] 对待识别数据需求较小 利用数据和领域相似性不合理,性能下降 大型网络改进[57–59] 特征提取能力强、分类准确 需要大量声图数据 深度学习检测 文献[60–67] 性能优、定位精度高 需要大量声图数据、检测速度与网络模型和声图尺寸相关 样本扩充 成像仿真模拟[50,51] 生成过程
可解译,不需要样本真实场景仿真复杂度高,与真实场景还有差距 图像生成[51,55,56] 与真实声图场景差距较小 需要训练数据,生成过程不可解译  下载: 导出CSV
下载: 导出CSV
表 2 三维声呐图像目标识别方法比较
类型 方法 优点 缺点 二维化 图像分割、手工特征及统计学习[69-72];二维目标检测网络及语义分割网络[73-77] 应用条件和二维声图像识别相似,研究工作相对成熟;参数规模和训练成本较低。 对空间关系的利用不足;不同成像类型的处理方法差异大,视角选择对识别结果影响显著;难以适用于具备穿透作用的低频声呐。 体素 浅层神经网络[79];3D-UNet及3D-VNet[78] 信息完整,对空间关联的描述清晰;适用于具备穿透作用的低频声呐;可以面向语义分割。 计算量大;对部分成像声呐数据冗余计算多;非直接获得的体素数据,网格分辨率影响识别结果;对小目标适应性不足。 点云 点云抽稀、聚类分割[80];浅层神经网络[83];三维点云检测网络(PointNet等)[81,82,84] 计算规模可控;信息相对完整,表达方式接近多波束成像的本质。 需克服点云排列顺序的影响(无序性);点云滤波算法对识别结果和计算规模有较大影响;
下载: 导出CSV
-
[1] STEINIGER Y, KRAUS D, and MEISEN T. Survey on deep learning based computer vision for sonar imagery[J]. Engineering Applications of Artificial Intelligence, 2022, 114: 105157. doi: 10.1016/j.engappai.2022.105157. [2] 李宝奇, 黄海宁, 刘纪元, 等. 基于改进SSD的合成孔径声呐图像水下多尺度目标轻量化检测模型[J]. 电子与信息学报, 2021, 43(10): 2854–2862. doi: 10.11999/JEIT201042.LI Baoqi, HUANG Haining, LIU Jiyuan, et al. Synthetic aperture sonar underwater multi-scale target efficient detection model based on improved single shot detector[J]. Journal of Electronics & Information Technology, 2021, 43(10): 2854–2862. doi: 10.11999/JEIT201042. [3] 罗逸豪, 刘奇佩, 张吟, 等. 基于深度学习的水下图像目标检测综述[J]. 电子与信息学报, 2023, 45(10): 3468–3482. doi: 10.11999/JEIT221402.LUO Yihao, LIU Qipei, ZHANG Yin, et al. Review of underwater image object detection based on deep learning[J]. Journal of Electronics & Information Technology, 2023, 45(10): 3468–3482. doi: 10.11999/JEIT221402. [4] LECUN Y, BENGIO Y, and HINTON G. Deep learning[J]. Nature, 2015, 521(7553): 436–444. doi: 10.1038/nature14539. [5] SCHMIDHUBER J. Deep learning in neural networks: An overview[J]. Neural Networks, 2015, 61: 85–117. doi: 10.1016/j.neunet.2014.09.003. [6] HINTON G. Where do features come from?[J]. Cognitive Science, 2014, 38(6): 1078–1101. doi: 10.1111/cogs.12049. [7] CHEW J L and CHITRE M. Object detection with sector scanning sonar[C]. 2013 OCEANS-San Diego, San Diego, USA, 2013: 1–8. doi: 10.23919/OCEANS.2013.6741056. [8] Teledyne Maritime: BlueView M450 Mk2[EB/OL]. https://www.teledynemarine.com/en-us/products/Pages/BlueView-M450-Mk2.aspx. [9] JOHNSON H P and HELFERTY M. The geological interpretation of side-scan sonar[J]. Reviews of Geophysics, 1990, 28(4): 357–380. doi: 10.1029/RG028i004p00357. [10] EdgeTech 4125i: Ultra high resolution lightweight, portable[EB/OL].https://www.edgetech.com/product/4125-ultra-high-resolution-lightweight-portable/. [11] HAYES M P and GOUGH P T. Synthetic aperture sonar: A review of current status[J]. IEEE Journal of Oceanic Engineering, 2009, 34(3): 207–224. doi: 10.1109/JOE.2009.2020853. [12] WESTLEY K, PLETS R, QUINN R, et al. Optimising protocols for high-definition imaging of historic shipwrecks using multibeam echosounder[J]. Archaeological and Anthropological Sciences, 2019, 11(7): 3629–3645. doi: 10.1007/s12520-019-00831-6. [13] Kongsberg Maritime: EM2040P MKII Multibeam echosounder[EB/OL].https://www.kongsberg.com/discovery/seafloor-mapping/EM2040P-MkII/. [14] SÆBØ T O, SYNNES S A V, and HANSEN R E. Wideband interferometry in synthetic aperture sonar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(8): 4450–4459. doi: 10.1109/TGRS.2013.2244900. [15] THOMAS B W and HUNTER A J. Interferometric synthetic aperture sonar large scale simulated data benchmark of a ship wreck[J]. Electronics Letters, 2023, 59(10): e12810. doi: 10.1049/ell2.12810. [16] DAVIS A and LUGSDIN A. High speed underwater inspection for port and harbour security using Coda Echoscope 3D sonar[C]. Proceedings of OCEANS 2005 MTS/IEEE, Washington, USA, 2005: 2006–2011. doi: 10.1109/OCEANS.2005.1640053. [17] Kraken Sub-Bottom Imager (SBI)[EB/OL]. https://krakenrobotics.com/our-services/sub-bottom-imager/. [18] FEI Tai, KRAUS D, and ZOUBIR A M. Contributions to automatic target recognition systems for underwater mine classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(1): 505–518. doi: 10.1109/TGRS.2014.2324971. [19] SCHOCK S G, WULF J, QUENTIN G, et al. Synthetic aperture processing of buried object scanning sonar data[C]. Proceedings of OCEANS 2005 MTS/IEEE, Washington, USA, 2005: 2236–2241. doi: 10.1109/OCEANS.2005.1640098. [20] REED S, PETILOT Y, and BELL J. A model based approach to mine detection and classification in sidescan sonar[C]. Oceans 2003. Celebrating the Past . . Teaming Toward the Future, San Diego, USA, 2003: 1402–1407. doi: 10.1109/OCEANS.2003.178066. [21] REED S, PETILLOT Y, and BELL J. Automated approach to classification of mine-like objects in sidescan sonar using highlight and shadow information[J]. IEE Proceedings-Radar, Sonar and Navigation, 2004, 151(1): 48–56. doi: 10.1049/ip-rsn:20040117. [22] BELL J M, PETILLOT Y R, LEBART K, et al. Target recognition in synthetic aperture and high resolution sidescan sonar[C]. 2006 IET Seminar on High Resolution Imaging and Target Classification, London, UK, 2010: 99–106. [23] 孙宝申. 高分辨侧扫及合成孔径声呐图像与回波中类似水雷目标计算机检测与分类[J]. 应用声学, 2013, 32(4): 305–311.SUN Baoshen. Computer aided detection and classification of mine-like objects in high-resolution side scan and synthetic aperture sonar images and waveforms[J]. Applied Acoustics, 2013, 32(4): 305–311. [24] MYERS V and FAWCETT J. A template matching procedure for automatic target recognition in synthetic aperture sonar imagery[J]. IEEE Signal Processing Letters, 2010, 17(7): 683–686. doi: 10.1109/LSP.2010.2051574. [25] DOBECK G J, HYLAND J C, and SMEDLEY L D. Automated detection and classification of sea mines in sonar imagery[C]. Proceedings of the SPIE 3079, Detection and Remediation Technologies for Mines and Minelike Targets II, Orlando, USA, 1997: 90–110. doi: 10.1117/12.280846. [26] LOPERA O and DUPONT Y. Automated target recognition with SAS: Shadow and highlight-based classification[C]. 2012 Oceans, Hampton Roads, USA, 2012: 1–5. doi: 10.1109/OCEANS.2012.6405117. [27] WILLIAMS D P. Fast Target detection in synthetic aperture sonar imagery: A new algorithm and large-scale performance analysis[J]. IEEE Journal of Oceanic Engineering, 2015, 40(1): 71–92. doi: 10.1109/JOE.2013.2294532. [28] WILLIAMS D P. The mondrian detection algorithm for sonar imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(2): 1091–1102. doi: 10.1109/TGRS.2017.2758808. [29] HURTÓS N, PALOMERAS N, CARRERA A, et al. Autonomous detection, following and mapping of an underwater chain using sonar[J]. Ocean Engineering, 2017, 130: 336–350. doi: 10.1016/j.oceaneng.2016.11.072. [30] BARNGROVER C M. Automated detection of mine-like objects in side scan sonar imagery[D]. [Ph. D. dissertation], University of California, 2014. [31] BARNGROVER C, ALTHOFF A, DEGUZMAN P, et al. A brain-computer interface (BCI) for the detection of mine-like objects in sidescan sonar imagery[J]. IEEE Journal of Oceanic Engineering, 2016, 41(1): 123–138. doi: 10.1109/JOE.2015.2408471. [32] GALCERAN E, DJAPIC V, CARRERAS M, et al. A real-time underwater object detection algorithm for multi-beam forward looking sonar[J]. IFAC Proceedings Volumes, 2012, 45(5): 306–311. doi: 10.3182/20120410-3-PT-4028.00051. [33] FERREIRA F, DJAPIC V, MICHELI M, et al. Forward looking sonar mosaicing for mine countermeasures[J]. Annual Reviews in Control, 2015, 40: 212–226. doi: 10.1016/j.arcontrol.2015.09.014. [34] CHHABRA P S, PAILHAS Y, WALLACE A M, et al. Target classification in SAS imagery using orthogonal Basis Selection[C]. OCEANS 2017 - Aberdeen, Aberdeen, UK, 2017: 1–10. doi: 10.1109/OCEANSE.2017.8084647. [35] LI Shaobo, MA Jinfeng, WU Yunlong, et al. SSS small target detection via combining weighted sparse model with shadow characteristics[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5911711. doi: 10.1109/TGRS.2023.3285436. [36] AZIMI-SADJADI M R, KLAUSNER N, and KOPACZ J. Detection of underwater targets using a subspace-based method with learning[J]. IEEE Journal of Oceanic Engineering, 2017, 42(4): 869–879. doi: 10.1109/JOE.2016.2637138. [37] MCKAY J, MONGA V, and RAJ R G. Robust sonar ATR through Bayesian pose-corrected sparse classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(10): 5563–5576. doi: 10.1109/TGRS.2017.2710040. [38] BRANDES T S, BALLARD B, RAMAKRISHNAN S, et al. Environmentally adaptive automated recognition of underwater mines with synthetic aperture sonar imagery[J]. The Journal of the Acoustical Society of America, 2021, 150(2): 851–863. doi: 10.1121/10.0005811. [39] ACOSTA G G and VILLAR S A. Accumulated CA-CFAR process in 2-D for online object detection from sidescan sonar data[J]. IEEE Journal of Oceanic Engineering, 2015, 40(3): 558–569. doi: 10.1109/JOE.2014.2356951. [40] KLAUSNER N and AZIMI-SADJADI M R. Non-Gaussian target detection in sonar imagery using the multivariate laplace distribution[J]. IEEE Journal of Oceanic Engineering, 2015, 40(2): 452–464. doi: 10.1109/JOE.2014.2328211. [41] ABU A and DIAMANT R. A statistically-based method for the detection of underwater objects in sonar imagery[J]. IEEE Sensors Journal, 2019, 19(16): 6858–6871. doi: 10.1109/JSEN.2019.2912325. [42] WILLIAMS D P. Underwater target classification in synthetic aperture sonar imagery using deep convolutional neural networks[C]. 2016 23rd International Conference on Pattern Recognition, Cancun, Mexico, 2016: 2497–2502. doi: 10.1109/ICPR.2016.7900011. [43] MCKAY J, GERG I, MONGA V, et al. What's mine is yours: Pretrained CNNs for limited training sonar ATR[J]. OCEANS 2017 - Anchorage, Anchorage, USA, 2017: 1–7. [44] 朱可卿, 田杰, 黄海宁. 水下高分辨率声图中小目标的深度网络分类方法[J]. 声学学报, 2019, 44(4): 595–603. doi: 10.15949/j.cnki.0371-0025.2019.04.020.ZHU Keqing, TIAN Jie, and HUANG Haining. Underwater objects classification method in high-resolution sonar images using deep neural network[J]. Acta Acustica, 2019, 44(4): 595–603. doi: 10.15949/j.cnki.0371-0025.2019.04.020. [45] CHENG Zhen, HUO Guanying, and LI Haisen. A multi-domain collaborative transfer learning method with multi-scale repeated attention mechanism for underwater side-scan sonar image classification[J]. Remote Sensing, 2022, 14(2): 355. doi: 10.3390/rs14020355. [46] XU Huipu, YANG Linzhen, and LONG Xiangyang. Underwater sonar image classification with small samples based on parameter-based transfer learning and deep learning[C]. 2022 Global Conference on Robotics, Artificial Intelligence and Information Technology, Chicago, USA, 2022: 304–307. doi: 10.1109/GCRAIT55928.2022.00071. [47] OCHAL M, VAZQUEZ J, PETILLOT Y, et al. A comparison of few-shot learning methods for underwater optical and sonar image classification[C]. Global Oceans 2020: Singapore–U. S. Gulf Coast, Biloxi, USA, 2020: 1–10. doi: 10.1109/IEEECONF38699.2020.9389475. [48] 陈禹乐, 李博, 梁红, 等. 小样本下基于深度学习的声呐图像分类研究[J]. 西北工业大学学报, 2022, 40(4): 739–745. doi: 10.3969/j.issn.1000-2758.2022.04.004.CHEN Yule, LI Bo, LIANG Hong, et al. Research on sonar image few-shot classification based on deep learning[J]. Journal of Northwestern Polytechnical University, 2022, 40(4): 739–745. doi: 10.3969/j.issn.1000-2758.2022.04.004. [49] XU Huipu, YANG Linzhen, and ZHANG Meixiang. Unsupervised classification based on deep adaptation network for sonar images[J]. Journal of Electronic Imaging, 2023, 32(1): 013029. doi: 10.1117/1.JEI.32.1.013029. [50] BELL J M. A model for the simulation of sidescan sonar[D]. [Ph. D. dissertation], Heriot-Watt University, 1995. [51] BELL J M, DARLINGTON D J, and ELSTON G R. Techniques for the physical modelling of the sonar image generation process[C]. Proc. 1st Int. Symp. Physics Signal Image Processing (PSIP'99), 1999: 66–72. [52] CERQUEIRA R, TROCOLI T, NEVES G, et al. A novel GPU-based sonar simulator for real-time applications[J]. Computers & Graphics, 2017, 68: 66–76. doi: 10.1016/j.cag.2017.08.008. [53] CERQUEIRA R, TROCOLI T, ALBIEZ J, et al. A rasterized ray-tracer pipeline for real-time, multi-device sonar simulation[J]. Graphical Models, 2020, 111: 101086. doi: 10.1016/j.gmod.2020.101086. [54] 李响. 侧扫声呐图像目标样本生成和分类方法研究[D]. [硕士论文], 哈尔滨工程大学, 2020. doi: 10.27060/d.cnki.ghbcu.2020.000286.LI Xiang. Research on target sample generation and classification of side scan sonar image[D]. [Master dissertation], Harbin Engineering University, 2020. doi: 10.27060/d.cnki.ghbcu.2020.000286. [55] 李宝奇, 黄海宁, 刘纪元, 等. 基于改进CycleGAN的光学图像迁移生成水下小目标合成孔径声呐图像算法研究[J]. 电子学报, 2021, 49(9): 1746–1753. doi: 10.12263/DZXB.20200712.LI Baoqi, HUANG Haining, LIU Jiyuan, et al. Optical image-to-underwater small target synthetic aperture sonar image translation algorithm based on improved CycleGAN[J]. Acta Electronica Sinica, 2021, 49(9): 1746–1753. doi: 10.12263/DZXB.20200712. [56] HU Yuxiang, ZHANG Wu, LI Baoqi, et al. Self-perceptual generative adversarial network for synthetic aperture sonar image generation[C]. Proceedings of the SPIE 12705, 14th International Conference on Graphics and Image Processing, Nanjing, China, 2022: 127052M. doi: 10.1117/12.2680115. [57] DU Yunben, LIN Wei, ZHONG Weibo, et al. An effective approach for sonar image recognition with improved efficientdet and ensemble learning[C]. 2022 5th International Conference on Advanced Algorithms and Control Engineering, Sanya, China, 2022: 012038. doi: 10.1088/1742-6596/2258/1/012038. [58] LEI Can, WANG Huigang, and LEI Juan. Si-gat: A method based on improved graph attention network for sonar image classification[J]. arXiv preprint arXiv: 2211.15133, 2022. doi: 10.48550/arXiv.2211.15133. [59] RUAN Fengxue, DANG Lanxue, GE Qiang, et al. Dual-path residual “shrinkage” network for side-scan sonar image classification[J]. Computational Intelligence and Neuroscience, 2022, 2022: 6962838. doi: 10.1155/2022/6962838. [60] 汤寓麟, 李厚朴, 张卫东, 等. 侧扫声呐检测沉船目标的轻量化DETR-YOLO法[J]. 系统工程与电子技术, 2022, 44(8): 2427–2436. doi: 10.12305/j.issn.1001-506X.2022.08.06.TANG Yulin, LI Houpu, ZHANG Weidong, et al. Lightweight DETR-YOLO method for detecting shipwreck target in side-scan sonar[J]. Systems Engineering and Electronics, 2022, 44(8): 2427–2436. doi: 10.12305/j.issn.1001-506X.2022.08.06. [61] STEINIGER Y, GROEN J, STOPPE J, et al. A study on modern deep learning detection algorithms for automatic target recognition in sidescan sonar images[J]. Proceedings of Meetings on Acoustics, 2021, 44(1): 070010. doi: 10.1121/2.0001470. [62] YU Yongcan, ZHAO Jianhu, GONG Quanhua, et al. Real-time underwater maritime object detection in side-scan sonar images based on transformer-YOLOv5[J]. Remote Sensing, 2021, 13(18): 3555. doi: 10.3390/rs13183555. [63] 李宝奇, 黄海宁, 刘纪元, 等. 合成孔径声呐图像水下小目标检测方法及系统[P]. 中国, 202311062705.1, 2023.LI Baoqi, HUANG Haining, LIU Jiyuan, et al. Underwater small target detection method and system for synthetic aperture sonar image[P]. CN, 202311062705.1, 2023. [64] YANG Chao, LI Yongpeng, JIANG Longyu, et al. Foreground enhancement network for object detection in sonar images[J]. Machine Vision and Applications, 2023, 34(4): 56. doi: 10.1007/s00138-023-01406-1. [65] TANG Yulin, WANG Liming, LI Houpu, et al. Side-scan sonar underwater target segmentation using the BHP-UNet[J]. EURASIP Journal on Advances in Signal Processing, 2023, 2023(1): 76. doi: 10.1186/s13634-023-01040-z. [66] ER M J, CHEN Jie, and ZHANG Yani. Marine robotics 4.0: present and future of real-time detection techniques for underwater objects[C]. Industry 4.0—Perspectives and Applications. IntechOpen; Rijeka, Croatia, 2022: 8. [67] 李宝奇, 黄海宁, 刘纪元, 等. 复杂场景下合成孔径声呐图像多尺度目标检测方法及系统[P]. 中国, 202311061425.9, 2023.LI Baoqi, HUANG Haining, LIU Jiyuan, et al. Multi-scale target detection method and system for synthetic aperture sonar images in complex scenes[P]. CN, 202311061425.9, 2023. [68] TANG Yulin, WANG Liming, JIN Shaohua, et al. AUV-based side-scan sonar real-time method for underwater-target detection[J]. Journal of Marine Science and Engineering, 2023, 11(4): 690. doi: 10.3390/jmse11040690. [69] KONG Wanzeng, YU Jinshuai, CHENG Ying, et al. Automatic detection technology of sonar image target based on the three-dimensional imaging[J]. Journal of Sensors, 2017, 2017: 8231314. doi: 10.1155/2017/8231314. [70] GUERNEVE T, SUBR K, and PETILLOT Y. Underwater 3D structures as semantic landmarks in SONAR mapping[C]. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, Canada, 2017: 614–619. doi: 10.1109/IROS.2017.8202215. [71] 李志华, 李秋峦. 水下三维声呐目标在线运动监测与识别[J]. 船舶力学, 2015, 19(10): 1282–1288. doi: 10.3969/j.issn.1007-7294.2015.10.014.LI Zhihua and LI Qiuluan. On-line motion recognition for underwater 3-D sonar object[J]. Journal of Ship Mechanics, 2015, 19(10): 1282–1288. doi: 10.3969/j.issn.1007-7294.2015.10.014. [72] 钱威昆. 基于声呐图像的水下气体目标检测[D]. [硕士论文], 哈尔滨工程大学, 2021.QIAN Weikun. Underwater gas target detection based on sonar images[D]. [Master dissertation], Harbin Engineering University, 2021. [73] JIN Leilei, LIANG Hong, and YANG Changsheng. Accurate underwater ATR in forward-looking sonar imagery using deep convolutional neural networks[J]. IEEE Access, 2019, 7: 125522–125531. doi: 10.1109/ACCESS.2019.2939005. [74] XIONG Chunbao, LIAN Sida, and CHEN Wen. An ensemble method for automatic real-time detection, evaluation and position of exposed subsea pipelines based on 3D real-time sonar system[J]. Journal of Civil Structural Health Monitoring, 2023, 13(2/3): 485–504. doi: 10.1007/s13349-022-00654-5. [75] 黎宏涛. 基于多波束水体数据的落水集装箱识别及其三维重构研究[D]. [硕士论文], 东华理工大学, 2022.LI Hongtao. Identification of falling container and Its 3D reconstruction based on multibeam water body data[D]. [Master dissertation], East China University of Technology, 2022. [76] 李宝奇, 任露露, 陈发, 等. 基于前视三维声呐的轨条砦识别方法[J]. 水下无人系统学报, 2022, 30(6): 747–753. doi: 10.11993/j.issn.2096-3920.2022-0016.LI Baoqi, REN Lulu, CHEN Fa, et al. A method of erect rail barricade recognition based on forward-looking 3D sonar[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 747–753. doi: 10.11993/j.issn.2096-3920.2022-0016. [77] HOANG T, DALTON K S, GERG I D, et al. Resonant scattering-inspired deep networks for munition detection in 3D sonar imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5218317. doi: 10.1109/TGRS.2023.3324223. [78] HENLEY H, BERARD A, LAPISKY E, et al. Deep learning in shallow water: CNN-based 3D-FLS target recognition[C]. OCEANS 2018 MTS/IEEE Charleston, Charleston, USA, 2018: 1–7. doi: 10.1109/OCEANS.2018.8604518. [79] WILLIAMS D P and BROWN D C. Three-dimensional convolutional neural networks for target classification with volumetric sonar data[J]. Proceedings of Meetings on Acoustics, 2021, 44(1): 070005. doi: 10.1121/2.0001453. [80] 马鑫程, 张旭东, 贾旭. 基于三维声呐点云的水下沉井地形探测技术[J]. 海洋测绘, 2021, 41(6): 44–48. doi: 10.3969/j.issn.1671-3044.2021.06.010.MA Xincheng, ZHANG Xudong, and JIA Xu. Underwater caisson topography detection technology based on 3D sonar point clouds[J]. Hydrographic Surveying and Charting, 2021, 41(6): 44–48. doi: 10.3969/j.issn.1671-3044.2021.06.010. [81] SUNG M, KIM J, CHO H, et al. Underwater-sonar-image-based 3D point cloud reconstruction for high data utilization and object classification using a neural network[J]. Electronics, 2020, 9(11): 1763. doi: 10.3390/electronics9111763. [82] SADJOLI N, CAI Yiyu, SEET G, et al. PCD reconstruction, object classification and pose estimation for underwater vehicles using orthogonal multibeam forward looking sonar fusion[J]. Ocean Engineering, 2023, 288: 116019. doi: 10.1016/j.oceaneng.2023.116019. [83] DEBORTOLI R A. Deep perception without a camera: Enabling 3d reconstruction and object recognition using lidar and sonar sensing[D]. [Ph. D. dissertation], Oregon State University, 2021. [84] TSAI C M, LAI Y H, SUN Y D, et al. Multi-dimensional underwater point cloud detection based on deep learning[J]. Sensors, 2021, 21(3): 884. doi: 10.3390/s21030884. [85] CHENG Jingchun, TSAI Y H, WANG Shengjin, et al. SegFlow: Joint learning for video object segmentation and optical flow[C]. 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 2017: 686–695. doi: 10.1109/ICCV.2017.81. [86] LIANG Rui, YAN Lei, GAO Pengqi, et al. Aviation video moving-target detection with inter-frame difference[C]. 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 2010: 1494–1497. doi: 10.1109/CISP.2010.5646303. [87] CHAO Juan, JIANG Xinghao, and SUN Tanfeng. A novel video inter-frame forgery model detection scheme based on optical flow consistency[C]. Proceedings of the 11th International Workshop on Digital Watermarking, Shanghai, China, 2013: 267–281. doi: 10.1007/978-3-642-40099-5_22. [88] 崔杰, 胡长青, 徐海东. 基于帧差法的多波束前视声呐运动目标检测[J]. 仪器仪表学报, 2018, 39(2): 169–176. doi: 10.19650/j.cnki.cjsi.j1702414.CUI Jie, HU Changqing, and XU Haidong. Moving target detection for multi-beam forward-looking sonar based on frame-difference method[J]. Chinese Journal of Scientific Instrument, 2018, 39(2): 169–176. doi: 10.19650/j.cnki.cjsi.j1702414. [89] 范威, 朱代柱, 张德泽, 等. 混合高斯模型和Radon变换用于声呐图像背景抑制[J]. 水下无人系统学报, 2018, 26(5): 492–497. doi: 10.11993/j.issn.2096-3920.2018.05.018.FAN Wei, ZHU Daizhu, ZHANG Deze, et al. A method for background suppression of sonar image using gaussian mixture model and radon transform[J]. Journal of Unmanned Undersea Systems, 2018, 26(5): 492–497. doi: 10.11993/j.issn.2096-3920.2018.05.018. [90] LANE D M, CHANTLER M J, and DAI Dongyong. Robust tracking of multiple objects in sector-scan sonar image sequences using optical flow motion estimation[J]. IEEE Journal of Oceanic Engineering, 1998, 23(1): 31–46. doi: 10.1109/48.659448. [91] DEMARCO K J, WEST M E, and HOWARD A M. Sonar-based detection and tracking of a diver for underwater human-robot interaction scenarios[C]. 2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 2013: 2378–2383. doi: 10.1109/SMC.2013.406. [92] KAROUI I, QUIDU I, and LEGRIS M. Automatic sea-surface obstacle detection and tracking in forward-looking sonar image sequences[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(8): 4661–4669. doi: 10.1109/TGRS.2015.2405672. [93] REID D. An algorithm for tracking multiple targets[J]. IEEE Transactions on Automatic Control, 1979, 24(6): 843–854. doi: 10.1109/TAC.1979.1102177. [94] SINGER R A and STEIN J J. An optimal tracking filter for processing sensor data of imprecisely determined origin in surveillance systems[C]. 1971 IEEE Conference on Decision and Control, Miami Beach, USA, 1971: 171–175. doi: 10.1109/CDC.1971.270971. [95] CHANG K C and BAR-SHALOM Y. Joint probabilistic data association for multitarget tracking with possibly unresolved measurements and maneuvers[J]. IEEE Transactions on Automatic Control, 1984, 29(7): 585–594. doi: 10.1109/TAC.1984.1103597. [96] BAR-SHALOM Y and TSE E. Tracking in a cluttered environment with probabilistic data association[J]. Automatica, 1975, 11(5): 451–460. doi: 10.1016/0005-1098(75)90021-7. [97] ZHANG Tiedong, LIU Shuwei, HE Xiao, et al. Underwater target tracking using forward-looking sonar for autonomous underwater vehicles[J]. Sensors, 2020, 20(1): 102. doi: 10.3390/s20010102. [98] RODNINGSBY A and BAR-SHALOM Y. Tracking of divers using a probabilistic data association filter with a bubble model[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(3): 1181–1193. doi: 10.1109/TAES.2009.5259192. [99] CORALUPPI S and CARTHEL C. Multi-hypothesis sonar tracking[C]. Proceedings of the 7th International Conference on Information Fusion, 2004: 1–8. [100] CORALUPPI S P and CARTHEL C A. Multiple-hypothesis tracking for targets producing multiple measurements[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(3): 1485–1498. doi: 10.1109/TAES.2018.2796478. [101] BREKKE E, HALLINGSTAD O, and GLATTETRE J. Tracking small targets in heavy-tailed clutter using amplitude information[J]. IEEE Journal of Oceanic Engineering, 2010, 35(2): 314–329. doi: 10.1109/JOE.2010.2044670. [102] GEORGESCU R, WILLETT P, and SCHOENECKER S. GM-CPHD and ML-PDA applied to the Metron multi-static sonar dataset[C]. 2010 13th International Conference on Information Fusion, Edinburgh, UK, 2010: 1–8. doi: 10.1109/ICIF.2010.5711948. [103] WANG Xuezhi, MUSICKI D, ELLEM R, et al. Efficient and enhanced multi-target tracking with doppler measurements[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(4): 1400–1417. doi: 10.1109/TAES.2009.5310307. [104] DEMARCO K J, DU TOIT N E, and HOWARD A M. Tracking multiple fragmented objects with 2D imaging sonar[C]. OCEANS 2016 MTS/IEEE Monterey, Monterey, USA, 2016: 1–10. doi: 10.1109/OCEANS.2016.7761260. [105] WU Xia, PAN Han, XU Meng, et al. A unified framework for joint moving object detection and tracking in the sky and underwater[C]. Proceedings of the International Conference on Aerospace System Science and Engineering, Shanghai, China, 2023: 211–224. doi: 10.1007/978-981-16-8154-7_17. -


 下载:
下载:



图(7) / 表(3)
计量
- 文章访问数: 6032
- HTML全文浏览量: 3743
- PDF下载量: 1233
- 被引次数: 0
