

Joint Multi-UAV Trajectory Design for Power Line Inspection
-
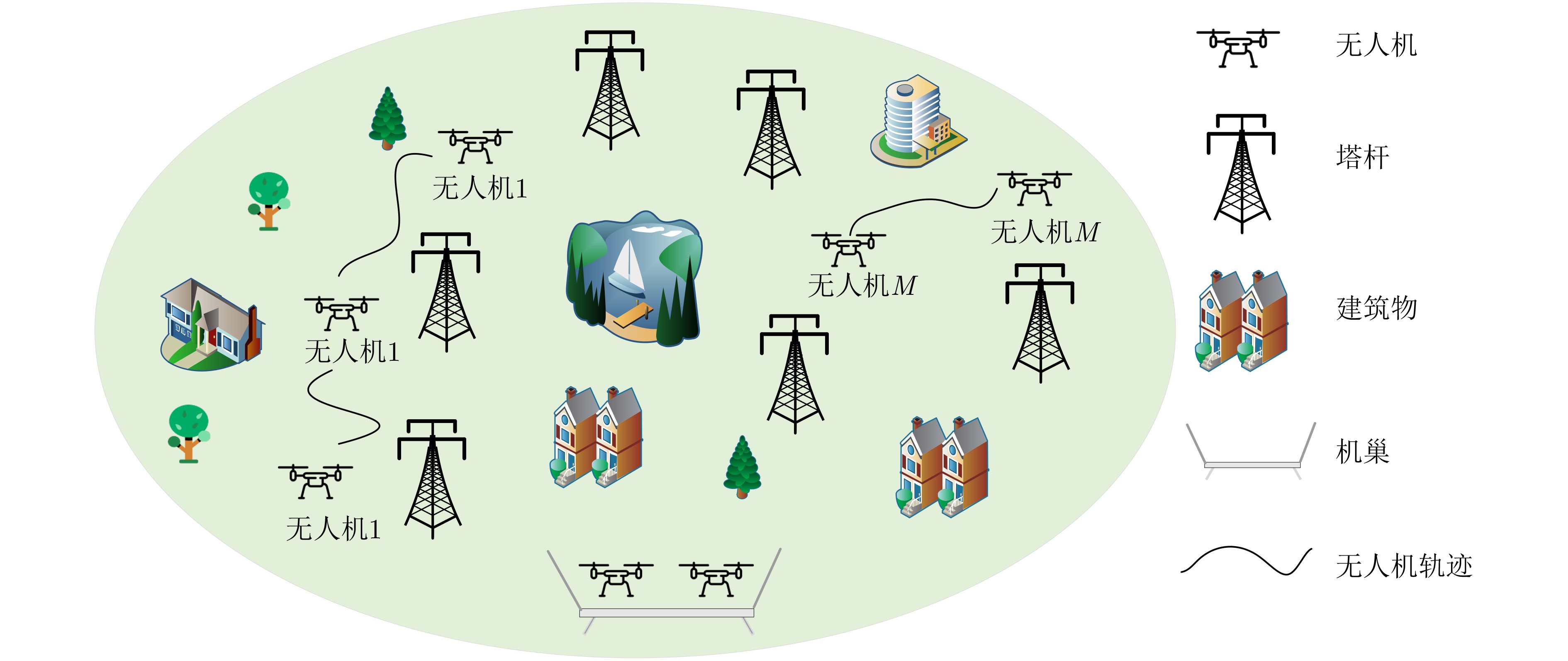
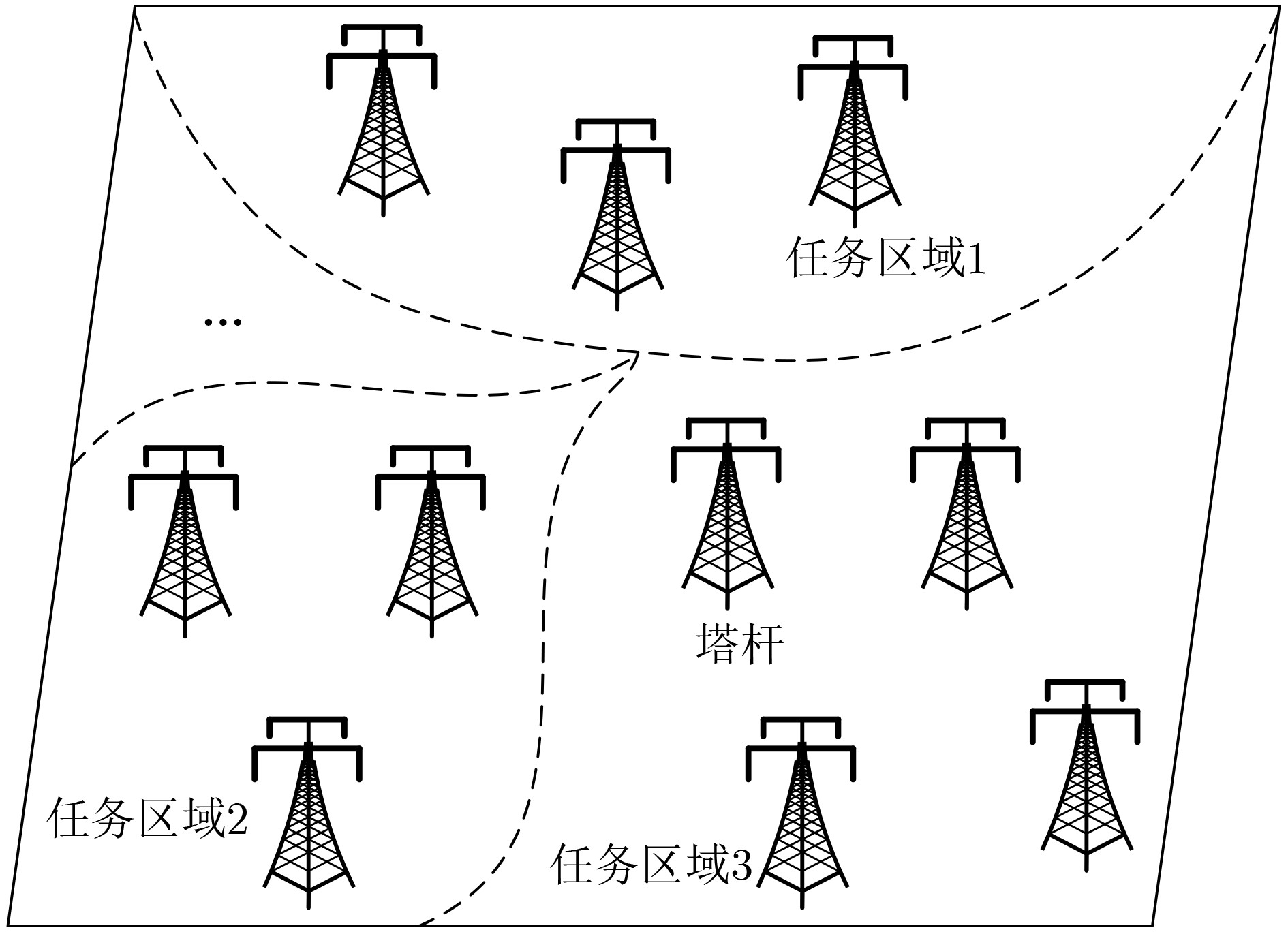
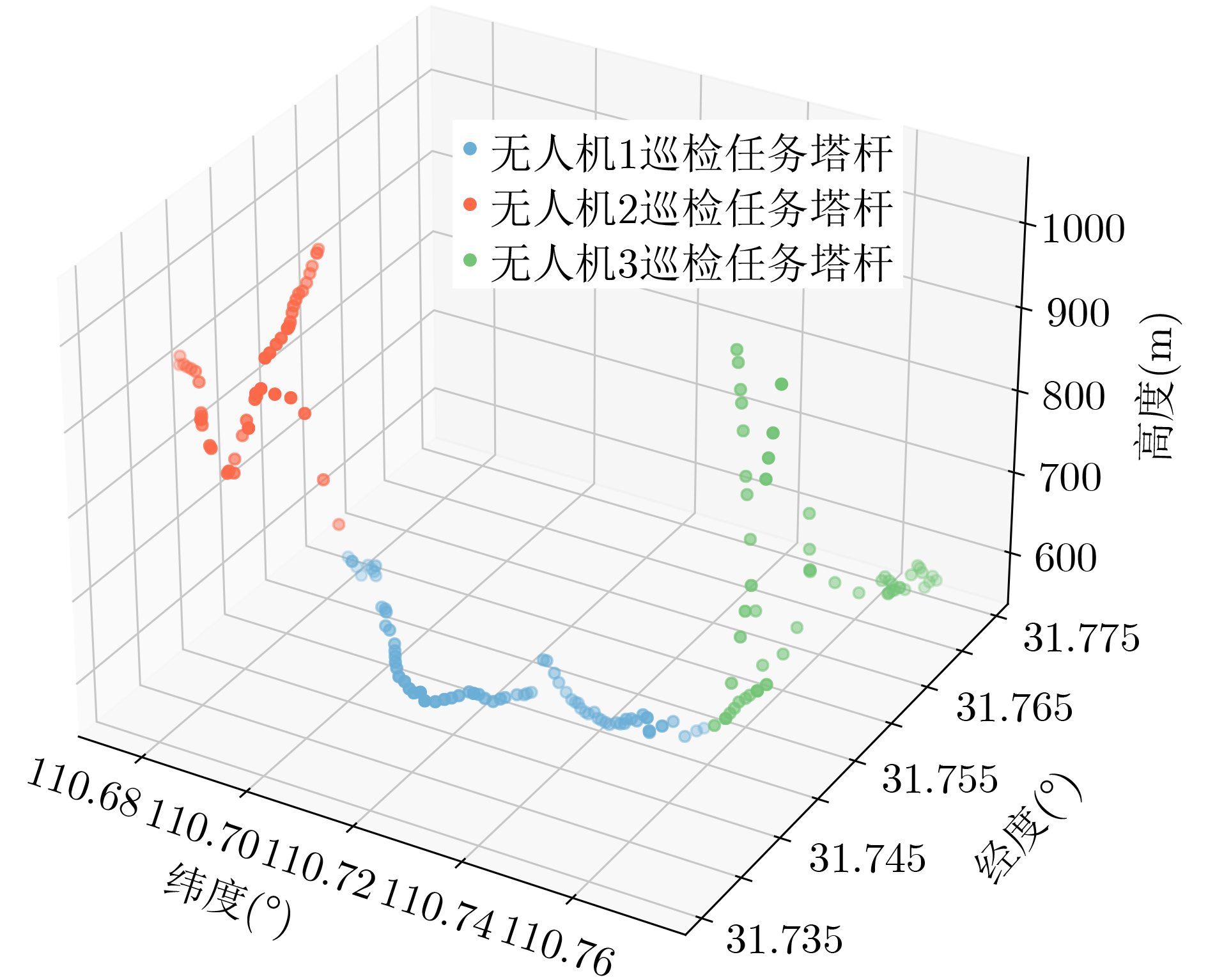
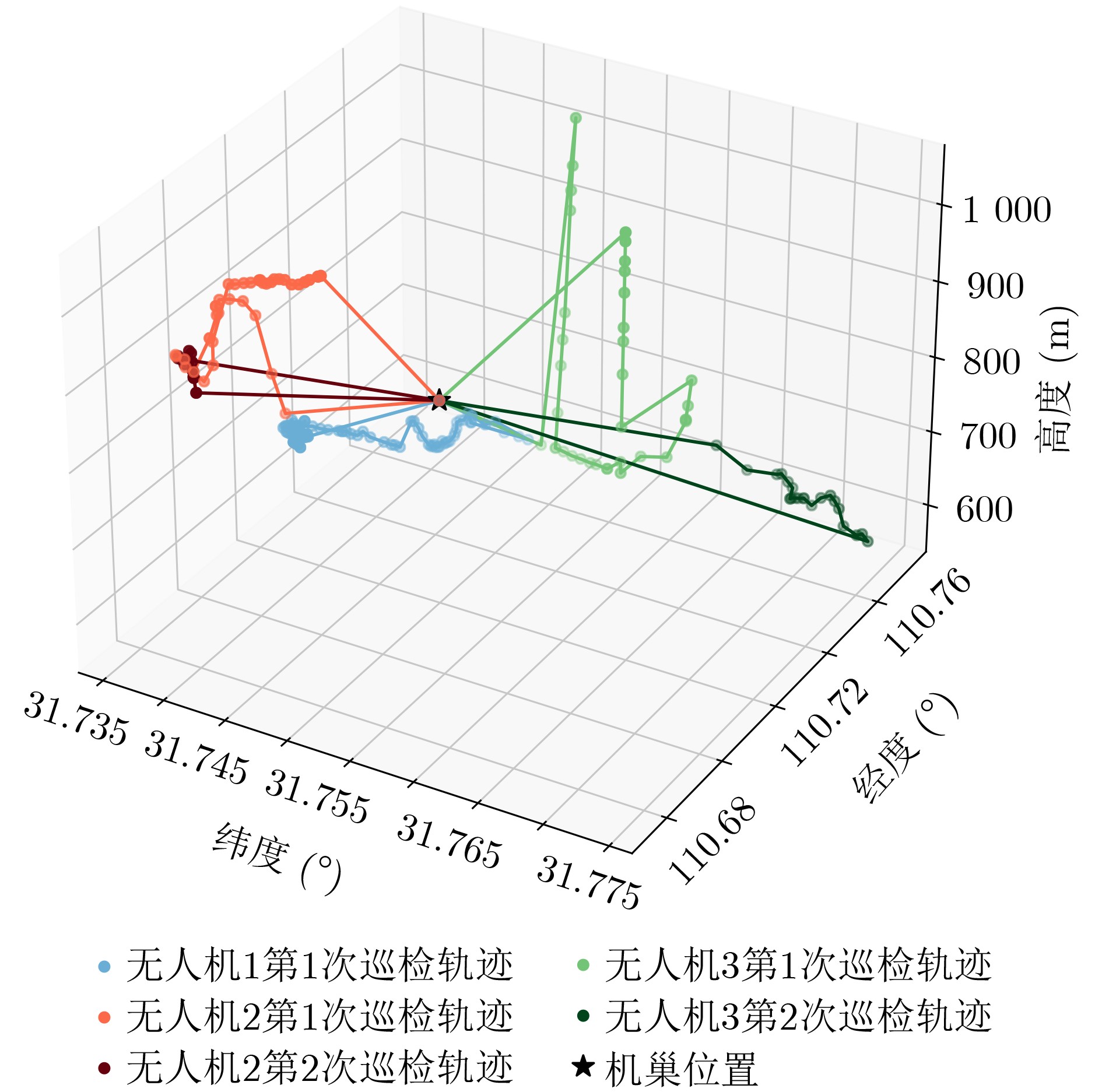
摘要: 无人机(UAV)技术在输电线路自动巡检的应用中具有重要的意义和广阔的应用空间。考虑到无人机的续航能力受限,无人机需要在电量耗尽前从机巢飞往指定巡检区域,完成输电塔杆的巡检,再安全返回机巢。为此,针对大范围输电线路巡检场景,该文以最小化巡检时间为优化目标,提出一种支持大范围输电线路多无人机巡检方法。具体而言,首先通过k-means++算法合理分配无人机巡检任务,再在巡检电池能量的约束下基于改进的模拟退火算法优化无人机巡检轨迹来提升巡检效率。最后,基于模拟真实环境中塔杆的分布数据,对所提出的无人机任务分配和轨迹设计算法进行仿真分析。仿真结果验证了所提算法通过多无人机巡检任务分配和轨迹设计可显著减少总的巡检时间。Abstract: Unmanned Aerial Vehicles (UAV) technology holds significant importance and offers extensive potential for application in the field of inspection. Taking into account the limited endurance of the UAV, it needs to fly from the nest to the designated inspection area, complete the inspection of the transmission tower, and then return to the nest safely before the battery is exhausted. For large-scale inspection scenarios, a multi-UAV inspection method is proposed to minimize the inspection time. In detail, the k-means++ algorithm is used to optimize task allocation of the UAVs and the modified simulated annealing algorithm is utilized to optimize the inspection trajectory to improve the inspection efficiency. Finally, based on the tower pole distribution data from a simulated real-world environment, the proposed algorithm is employed to assign tasks of the UAVs and design trajectories. The simulation results confirm that the proposed algorithm can significantly reduce the total inspection time through multi-UAV task allocation and trajectory design.
-
Key words:
- UAV inspection /
- Trajectory design /
- Inspection task allocation
-
1 K-means++算法流程
初始化: 设定$ K $值 迭代 (1)从数据集$ \left\{ {{{\boldsymbol{\alpha}} _1},{{\boldsymbol{\alpha}} _2}, \cdots ,{{\boldsymbol{\alpha}} _M}} \right\} $中随机选择一个样本点作为第一个初始聚类中心$ {{\boldsymbol{u}}_1} $; (2)对于数据集中的每一个数据$ {{\boldsymbol{\alpha}} _m} $,计算其到已选择的中心点中最近中心点的距离平方。$ D\left( {{{\boldsymbol{\alpha}} _m}} \right) = {\min _{{{\boldsymbol{u}}_k} \in U}}{\left\| {{{\boldsymbol{\alpha}} _m} - {{\boldsymbol{u}}_k}} \right\|^2} $,其中$ U $表
示已选择的中心点的集合;(3)选择一个新的数据点$ {{\boldsymbol{u}}_k} $作为新的中心,选择的概率为$ P\left( {{{\boldsymbol{u}}_k}} \right) = \dfrac{{D{{\left( {{{\boldsymbol{u}}_k}} \right)}^2}}}{{\displaystyle\sum\nolimits_{{{\boldsymbol{u}}_k} \in U} {D{{\left( {{{\boldsymbol{u}}_k}} \right)}^2}} }} $; (4)如果选择了$ K $个聚类中心,则停止迭代;否则返回(1)。  下载: 导出CSV
下载: 导出CSV
2 基于2-opt模拟退火算法无人机轨迹优化
输入:初始轨迹$ {{\boldsymbol{q}}_{{\text{current}}}} $,初始温度$ {T_{{\text{initial}}}} $,冷却率$ \rho $,终止温度
$ {T_{{\text{final}}}} $,目标函数$ f\left( {\boldsymbol{q}} \right) $输出:最优轨迹$ {{\boldsymbol{q}}_{{\text{best}}}} $ (1)设置$ T = {T_{{\text{initial}}}} $,$ {{\boldsymbol{q}}_{{\text{best}}}} $=$ {{\boldsymbol{q}}_{{\text{current}}}} $ (2)While $ T > {T_{{\text{final}}}} $ do (3) 随机交换当前轨迹$ {{\boldsymbol{q}}_{{\text{current}}}} $两个坐标点产生新的轨迹$ {\boldsymbol{q}}'_{{\text{current}}} $ (4) 通过2-opt算法对$ {\boldsymbol{q}}_{{\text{current}}}{{'}} $进行优化并产生新轨迹$ {{\boldsymbol{q}}_{{\text{new}}}} $ (5) 计算目标函数的差异$ \Delta E = f\left( {{{\boldsymbol{q}}_{{\text{new}}}}} \right) - f\left( {{{\boldsymbol{q}}_{{\text{current}}}}} \right) $ (6) If $ \Delta E < 0 $或$ {\text{random}}\left( {0,1} \right) < \exp ( - \Delta E/T) $ then (7) $ {{\boldsymbol{q}}_{{\text{current}}}} $=$ {{\boldsymbol{q}}_{{\text{new}}}} $ (8) If $ f\left( {{{\boldsymbol{q}}_{{\text{new}}}}} \right) $<$ f\left( {{{\boldsymbol{q}}_{{\text{best}}}}} \right) $ then (9) $ {{\boldsymbol{q}}_{{\text{best}}}} $=$ {{\boldsymbol{q}}_{{\text{new}}}} $ (10) End if (11) End if (12) 更新温度$ T = \rho * T $ (13) Return $ {{\boldsymbol{q}}_{{\text{best}}}} $
下载: 导出CSV
-
[1] YANG Lei, FAN Junfeng, LIU Yanhong, et al. A review on state-of-the-art power line inspection techniques[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(12): 9350–9365. doi: 10.1109/TIM.2020.3031194. [2] VLAHINIĆ S, FRANKOVIĆ D, ĐUROVIĆ M Ž, et al. Measurement uncertainty evaluation of transmission line parameters[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 9002407. doi: 10.1109/TIM.2021.3070600. [3] KATRASNIK J, PERNUS F, and LIKAR B. A survey of mobile robots for distribution power line inspection[J]. IEEE Transactions on Power Delivery, 2010, 25(1): 485–493. doi: 10.1109/TPWRD.2009.2035427. [4] DAI Lei, QI Juntong, HAN Jianda, et al. Camera selection for unmanned helicopter power line inspection[C]. IEEE PES Innovative Smart Grid Technologies, Tianjin, China, 2012: 1–4. doi: 10.1109/ISGT-Asia.2012.6303238. [5] SHAHRAKI A, TAHERKORDI A, HAUGEN O, et al. A survey and future directions on clustering: From WSNs to IoT and modern networking paradigms[J]. IEEE Transactions on Network and Service Management, 2021, 18(2): 2242–2274. doi: 10.1109/tnsm.2020.3035315. [6] XING Liudong. Reliability in internet of things: Current status and future perspectives[J]. IEEE Internet of Things Journal, 2020, 7(8): 6704–6721. doi: 10.1109/JIOT.2020.2993216. [7] 徐常志, 靳一, 李立, 等. 面向6G的星地融合无线传输技术[J]. 电子与信息学报, 2021, 43(1): 28–36. doi: 10.11999/JEIT200363.XU Changzhi, JIN Yi, LI Li, et al. Wireless transmission technology of satellite-terrestrial integration for 6G mobile communication[J]. Journal of Electronics & Information Technology, 2021, 43(1): 28–36. doi: 10.11999/JEIT200363. [8] DI FRANCO C and BUTTAZZO G. Coverage path planning for UAVs photogrammetry with energy and resolution constraints[J]. Journal of Intelligent & Robotic Systems, 2016, 83(3): 445–462. doi: 10.1007/s10846-016-0348-x. [9] LI Yan, CHEN Hai, ER M J, et al. Coverage path planning for UAVs based on enhanced exact cellular decomposition method[J]. Mechatronics, 2011, 21(5): 876–885. doi: 10.1016/j.mechatronics.2010.10.009. [10] CABREIRA T M, DI FRANCO C, FERREIRA P R, et al. Energy-aware spiral coverage path planning for UAV photogrammetric applications[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 3662–3668. doi: 10.1109/LRA.2018.2854967. [11] ZHOU Zhenyu, ZHANG Chuntian, XU Chen, et al. Energy-efficient industrial internet of UAVs for power line inspection in smart grid[J]. IEEE Transactions on Industrial Informatics, 2018, 14(6): 2705–2714. doi: 10.1109/TII.2018.2794320. [12] 吴官翰, 贾维敏, 赵建伟, 等. 基于多智能体强化学习的混合博弈模式下多无人机辅助通信系统设计[J]. 电子与信息学报, 2022, 44(3): 940–950. doi: 10.11999/JEIT210662.WU Guanhan, JIA Weimin, ZHAO Jianwei, et al. MARL-based design of multi-unmanned aerial vehicle assisted communication system with hybrid gaming mode[J]. Journal of Electronics & Information Technology, 2022, 44(3): 940–950. doi: 10.11999/JEIT210662. [13] 张广驰, 严雨琳, 崔苗, 等. 无人机基站的飞行路线在线优化设计[J]. 电子与信息学报, 2021, 43(12): 3605–3611. doi: 10.11999/JEIT200525.ZHANG Guangchi, YAN Yulin, CUI Miao, et al. Online trajectory optimization for the UAV-mounted base stations[J]. Journal of Electronics & Information Technology, 2021, 43(12): 3605–3611. doi: 10.11999/JEIT200525. [14] ZHAN Cheng and ZENG Yong. Energy minimization for cellular-connected UAV: From optimization to deep reinforcement learning[J]. IEEE Transactions on Wireless Communications, 2022, 21(7): 5541–5555. doi: 10.1109/TWC.2022.3142018. [15] ZHANG Wei, YANG Dingcheng, WU Fahui, et al. Trajectory design for UAV-based inspection system: A deep reinforcement learning approach[C]. 2023 IEEE International Conference on Communications Workshops (ICC Workshops), Rome, Italy, 2023: 1654–1659. doi: 10.1109/ICCWorkshops57953.2023.10283670. [16] ZHANG Yu, LI Junfeng, ZHANG Litong, et al. Energy consumption optimal design of power grid inspection trajectory for UAV mobile edge computing node[C]. 2021 6th Asia Conference on Power and Electrical Engineering (ACPEE), Chongqing, China, 2021: 1316–1321. doi: 10.1109/ACPEE51499.2021.9436834. [17] CAO Peng, LIU Yi, QIU Ming, et al. MEC-driven UAV routine inspection system in wind farm under wind influence[C]. 2019 12th International Conference on Intelligent Computation Technology and Automation (ICICTA), Xiangtan, China, 2019: 672–677. doi: 10.1109/ICICTA49267.2019.00148. [18] MONWAR M, SEMIARI O, and SAAD W. Optimized path planning for inspection by unmanned aerial vehicles swarm with energy constraints[C]. 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 2018: 1–6,doi: 10.1109/GLOCOM.2018.8647342. [19] ZENG Yong, XU Jie, and ZHANG Rui. Energy minimization for wireless communication with rotary-wing UAV[J]. IEEE Transactions on Wireless Communications, 2019, 18(4): 2329–2345. doi: 10.1109/TWC.2019.2902559. -

 下载:
下载:



图(11) / 表(3)
计量
- 文章访问数: 1217
- HTML全文浏览量: 1341
- PDF下载量: 147
- 被引次数: 0
