

Resource Allocation Algorithm of Space-Air-Ground Integrated Network for Dense Scenarios
-
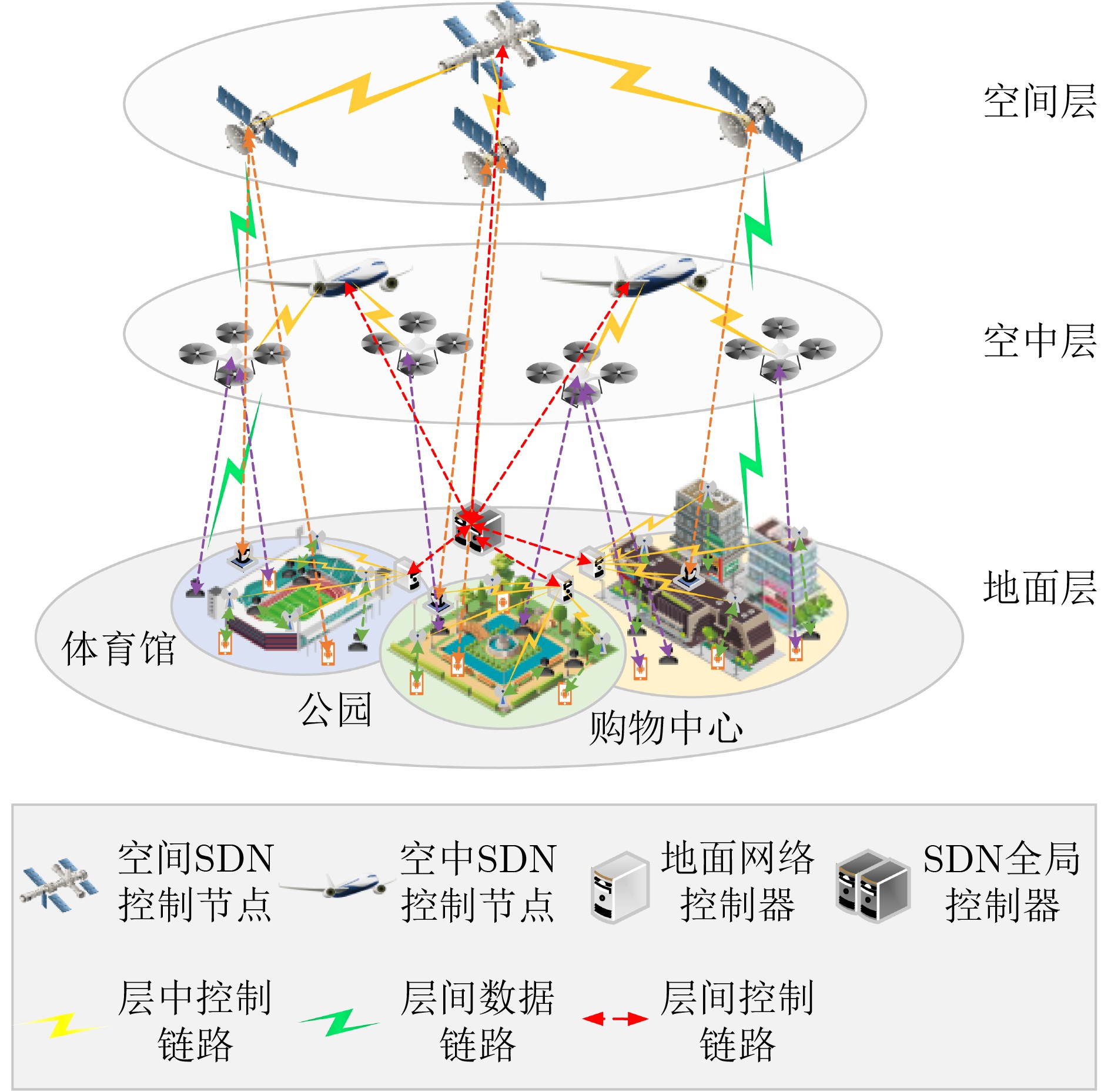
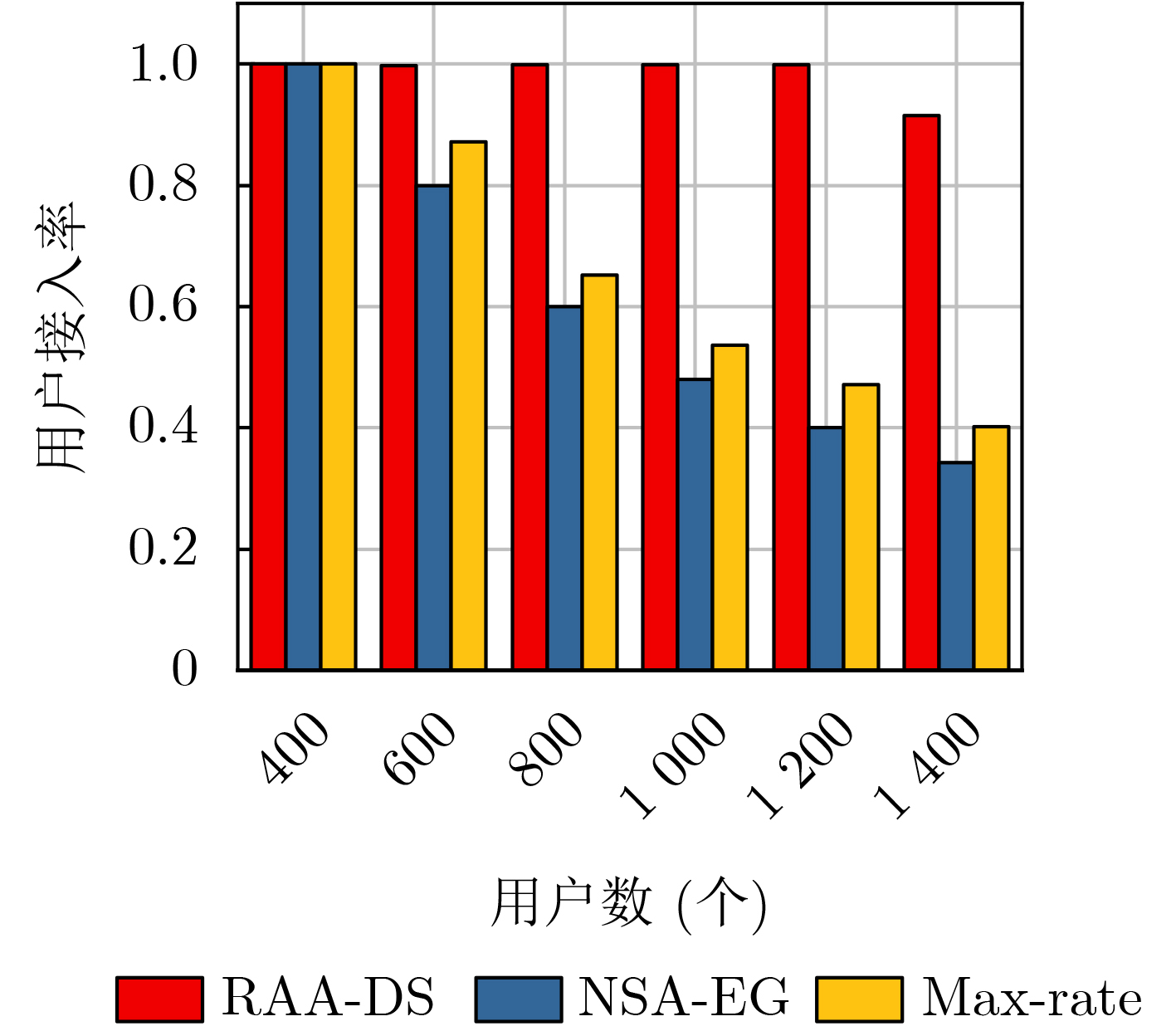
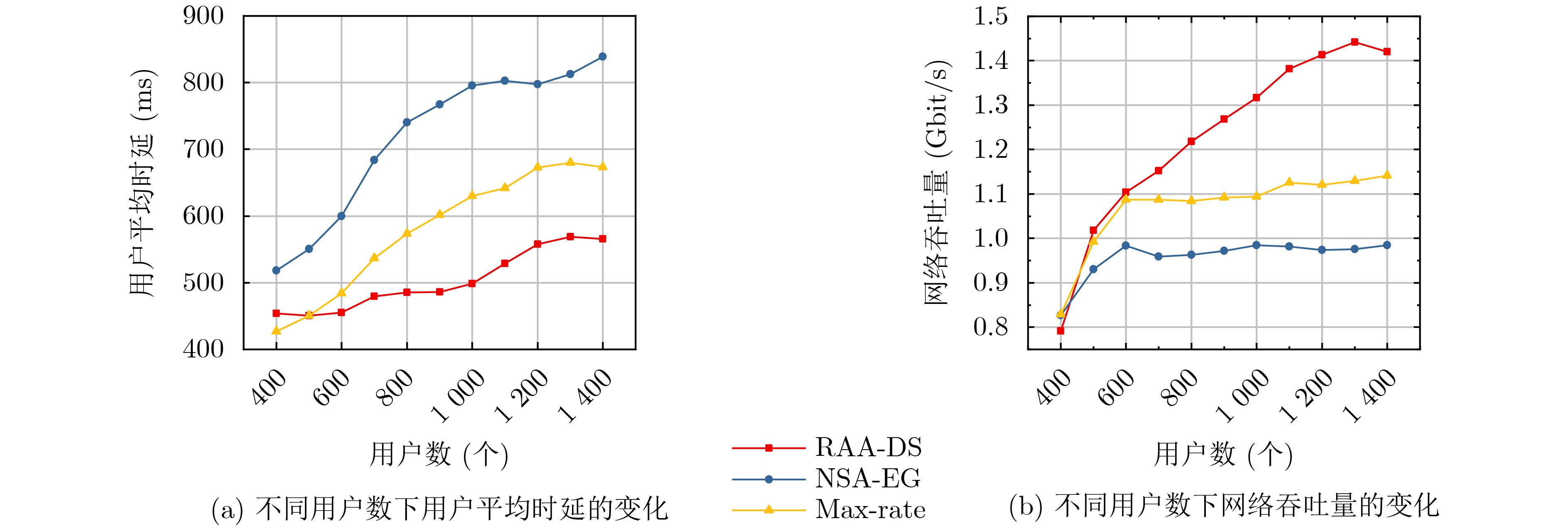
摘要: 空天地网络具有覆盖范围大、吞吐量高、弹性强等优点。该文针对大量用户并发接入、网络负载不均衡所引发的网络拥塞、服务质量恶化等问题,提出一种面向密集场景的资源分配算法。首先以用户需求为中心,根据不同类型用户任务的偏好来构建用户效用函数,然后基于匹配博弈的网络选择算法和结合对偶上升法的功率控制算法来实现负载均衡,优化资源分配方案。实验表明,相较于传统策略,所提策略整体用户接入率至少提高35%,时延和吞吐量方面性能提升超过50%;在密集场景下,能更有效地均衡负载,提升网络性能。Abstract: Space-air-ground integrated network has the advantages of extensive coverage, high throughput, and strong elasticity. A resource allocation algorithm for dense scenarios is proposed to solve the problems of network congestion and deterioration of service quality caused by concurrent access of many users and network load imbalance. Firstly, the user utility function is constructed based on the user demand and the preferences of different types of user tasks. Then, load balancing is realized based on the matching game network selection algorithm and the power control algorithm combined with the dual ascending method, and the resource allocation scheme is optimized. Experimental results show that compared with the traditional strategy, the proposed strategy increases the overall user access rate by at least 35%, and improves the performance of delay and throughput by more than 50%. Load balancing is more effective in dense scenarios and network performance is improved.
-
1 基于匹配博弈的网络选择算法
输入:用户效用值集合$ {U^{{\text{user}}}} $,偏好列表$ {{\mathrm{PL}}^{{\text{user}}}} $和$ {{\mathrm{PL}}^{{\text{dev}}}} $,数据
平面设备子信道数输出:网络选择结果矩阵$ {\text{\{}}{\mathbf{x}}{\text{\} }} $ (1) 初始化:未匹配的用户集合$ {\mathrm{PU}} $ (2) while $ {\mathrm{PU}} \notin \varnothing $ 或设备$ j $容量未满 do (3) 用户$ i $对$ {\mathrm{PL}}_i^{{\text{user}}} $中的设备进行评分,并向其中排列第一的
设备发起接入申请;(4) 设备$ j $根据$ {\mathrm{PL}}_j^{{\text{dev}}} $对发出请求的用户进行排序和评分; (5) if 设备$ j $容量未满 do (6) 根据剩余容量大小,让排名靠前的用户进入候补列表; (7) end if (8) if 用户$ i $已接入 do (9) 将用户$ i $从$ {{\mathrm{PL}}^{{\text{user}}}} $, $ {{\mathrm{PL}}^{{\text{dev}}}} $和$ {\mathrm{PU}} $中删除; (10) else if用户$ i $被设备$ j $拒绝 (11) 将设备$ j $从$ {\mathrm{PL}}_i^{{\text{user}}} $中删除,用户$ i $进入下一轮匹配; (12) end (13) if 设备$ j $容量已满 do (14) 设备$ j $只接收偏好顺位大于候补列表中最低偏好顺位的
用户,并拒绝该用户;(15) end  下载: 导出CSV
下载: 导出CSV
2 基于对偶上升法的功率控制算法
输入:网络选择结果矩阵$ {\text{\{ }}{\mathbf{x}}{\text{\} }} $ 输出:功率分配矩阵$ {{\{ }}{\mathbf{p}}{\text{\} }} $ (1) 初始化:${p_{i,j}} = \ln \left( {p_{\text{G}}^{\max }/{I_{\text{G}}}} \right)$, $ {\kappa _1},{\kappa _2},{\kappa _3} = 1 $, $ \varepsilon = 0.0001 $,
$ {\varepsilon _1} = 0.001 $,收敛阈值$\varDelta $,最大迭代次数$ {\mathrm{MIT}} $, $ t = 0 $;(2) for $ t{\text{ = }}1:{\mathrm{MIT}} $ do (3) for $ j = 1:N $ do (4) for $ i = 1:{\mathrm{IN}} $ do (5) 计算式(30),再通过式(33)计算出拉格朗日函数的部分
子式;(6) 通过式(35)迭代更新${p_{i,j}}$; (7) end for (8) end for (9) 结合上面算出的子式,通过式(33)计算出拉格朗日函数值; (10) for $ i = 1:{\mathrm{IN}} $ do (11) if 用户成功接入基站 do (12) 通过式(36)来迭代更新$ {\kappa _1},{\kappa _2} $; (13) end if (14) end for (15) for $ j = 1:N $ do (16) 通过式(36)来更新$ {\kappa _3} $; (17) end for (18) if $ \left| {F\left( {{p_{i,j}}} \right) - L\left( {{p_{i,j}},{\kappa _1},{\kappa _2},{\kappa _3}} \right)} \right| < \varDelta $ do (19) 结束迭代; (20) end if (21)$ t{\text{ = }}t + 1 $; (22)end for
下载: 导出CSV
3 面向密集场景的资源分配算法(RAA-DS)
(1) 初始化:用户集合$ \mathcal{I} $,微基站集合$ \mathcal{N} $,无人机集合$ \mathcal{M} $,卫星
集合$ \mathcal{S} $。(2) 通过层次分析法得到用户任务的偏好权重$ {a_i} $, $ {b_i} $, $ {c_i} $ (3) 通过用户效用函数(24)求得用户效用值,并将其从小到大排
序得到用户偏好列表$ {{\mathrm{PL}}^{{\text{user}}}} $(4) 通过设备效用函数(25)求得设备效用值,并将其从大到小排
序得到设备偏好列表$ {{\mathrm{PL}}^{{\text{dev}}}} $(5) 根据算法1进行网络选择,得到网络选择结果矩阵 (6) 将网络选择结果矩阵输入进算法2,得到功率分配结果 (7) 输出网络选择结果矩阵$ {{\{ }}{\mathbf{x}}{{\} }} $,功率分配矩阵$ {\text{\{}}{\mathbf{p}}{\text{\} }} $
下载: 导出CSV
表 1 仿真参数设置
参数设定 参考数值 参数设定 参考数值 微基站子信道数量(个) 120 无人机飞行高度(m) 500 微基站发射总功率(W) 60 卫星子信道数量(个) 200 微基站总带宽 (MHz) 20 卫星发射总功率(W) 600 无人机子信道数量(个) 300 卫星总带宽(MHz) 150 无人机发射总功率(W) 450 卫星天线增益(dB) 40 无人机总带宽(MHz) 200 用户接收天线增益(dB) 3 无人机天线增益(dB) 53 附加损耗因子(dB) 1.5
下载: 导出CSV
-
[1] WU Dapeng, SI Shushan, WU Shaoen, et al. Dynamic trust relationships aware data privacy protection in mobile crowd-sensing[J]. IEEE Internet of Things Journal, 2018, 5(4): 2958–2970. doi: 10.1109/JIOT.2017.2768073. [2] WU Dapeng, LIU Qianru, WANG Honggang, et al. Socially aware energy-efficient mobile edge collaboration for video distribution[J]. IEEE Transactions on Multimedia, 2017, 19(10): 2197–2209. doi: 10.1109/TMM.2017.2733300. [3] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789.CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics & Information Technology, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789. [4] 沈学民, 承楠, 周海波, 等. 空天地一体化网络技术: 探索与展望[J]. 物联网学报, 2020, 4(3): 1–19. doi: 10.11959/j.issn.2096-3750.2020.00142.SHEN Xuemin, CHENG Nan, ZHOU Haibo, et al. Space-air-ground integrated networks: Review and prospect[J]. Chinese Journal on Internet of Things, 2020, 4(3): 1–19. doi: 10.11959/j.issn.2096-3750.2020.00142. [5] 徐晓斌, 王琪, 范存群, 等. 面向空天地一体化信息网络的边缘计算资源融合管理方法[J]. 计算机学报, 2023, 46(4): 690–710. doi: 10.11897/SP.J.1016.2023.00690.XU Xiaobin, WANG Qi, FAN Cunqun, et al. An aggregated edge computing resource management method for space-air-ground integrated information networks[J]. Chinese Journal of Computers, 2023, 46(4): 690–710. doi: 10.11897/SP.J.1016.2023.00690. [6] HE Jingchao, CHENG Nan, YIN Zhisheng, et al. Service-oriented network resource orchestration in space-air-ground integrated network[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1): 1162–1174. doi: 10.1109/TVT.2023.3301676. [7] GUO Chao, GONG Cheng, XU Haitao, et al. A dynamic handover software-defined transmission control scheme in space-air-ground integrated networks[J]. IEEE Transactions on Wireless Communications, 2022, 21(8): 6110–6124. doi: 10.1109/TWC.2022.3146452. [8] CAO Bin, ZHANG Jintong, LIU Xin, et al. Edge–cloud resource scheduling in space–air–ground-integrated networks for internet of vehicles[J]. IEEE Internet of Things Journal, 2022, 9(8): 5765–5772. doi: 10.1109/JIOT.2021.3065583. [9] SUN Jinlong, LIU Fan, ZHOU Yuzhi, et al. Surveillance plane aided air-ground integrated vehicular networks: Architectures, applications, and potential[J]. IEEE Wireless Communications, 2020, 27(6): 122–128. doi: 10.1109/MWC.001.2000079. [10] LI Ruidong, MATSUZONO K, ASAEDA H, et al. Achieving high throughput for heterogeneous networks with consecutive caching and adaptive retrieval[J]. IEEE Transactions on Network Science and Engineering, 2020, 7(4): 2443–2455. doi: 10.1109/TNSE.2020.3010939. [11] ZHU Yun, LI Jiade, HUANG Qiuyuan, et al. Game theoretic approach for network access control in heterogeneous networks[J]. IEEE Transactions on Vehicular Technology, 2018, 67(10): 9856–9866. doi: 10.1109/TVT.2018.2856752. [12] FAN Kexin, FENG Bowen, ZHANG Xilin, et al. Network selection based on evolutionary game and deep reinforcement learning in space-air-ground integrated network[J]. IEEE Transactions on Network Science and Engineering, 2022, 9(3): 1802–1812. doi: 10.1109/TNSE.2022.3153480. [13] CHEN Qian, MENG Weixiao, HAN Shuai, et al. Service-oriented fair resource allocation and auction for civil aircrafts augmented space-air-ground integrated networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 13658–13672. doi: 10.1109/TVT.2020.3021423. [14] 谭诗翰, 金凤林, 顿聪颖. 面向用户需求的空天地一体化车载网络任务分配策略[J]. 系统工程与电子技术, 2022, 44(5): 1717–1727. doi: 10.12305/j.issn.1001-506X.2022.05.35.TAN Shihan, JIN Fenglin, and DUN Congying. Task assignment strategy for space-air-ground integrated vehicular networks oriented to user demand[J]. Systems Engineering and Electronics, 2022, 44(5): 1717–1727. doi: 10.12305/j.issn.1001-506X.2022.05.35. [15] 3GPP. TS 38.901 Study on channel model for frequencies from 0.5 to 100 GHz[EB/OL]. https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3173, 2022. [16] GU Shushi, SUN Xinyi, YANG Zhihua, et al. Energy-aware coded caching strategy design with resource optimization for satellite-UAV-vehicle-integrated networks[J]. IEEE Internet of Things Journal, 2022, 9(8): 5799–5811. doi: 10.1109/JIOT.2021.3065664. [17] ZENG Yong, XU Jie, and ZHANG Rui. Energy minimization for wireless communication with rotary-wing UAV[J]. IEEE Transactions on Wireless Communications, 2019, 18(4): 2329–2345. doi: 10.1109/TWC.2019.2902559. [18] GOYAL R K and KAUSHAL S. Network selection using AHP for fast moving vehicles in heterogeneous networks[M]. CHAKI R, CORTESI A, SAEED K, et al. Advanced Computing and Systems for Security: Volume 1. New Delhi: Springer, 2016: 235–243. doi: 10.1007/978-81-322-2650-5_15. [19] 张红旗, 黄睿, 常德显. 一种基于匹配博弈的服务链协同映射方法[J]. 电子与信息学报, 2019, 41(2): 385–393. doi: 10.11999/JEIT180385.ZHANG Hongqi, HUANG Rui, and CHANG Dexian. A collaborative mapping method for service chain based on matching game[J]. Journal of Electronics & Information Technology, 2019, 41(2): 385–393. doi: 10.11999/JEIT180385. -

 下载:
下载:


图(6) / 表(4)
计量
- 文章访问数: 843
- HTML全文浏览量: 775
- PDF下载量: 81
- 被引次数: 0
