

Anomaly Detection of Small Targets on Sea Surface Based on Deep Graph Infomax
-
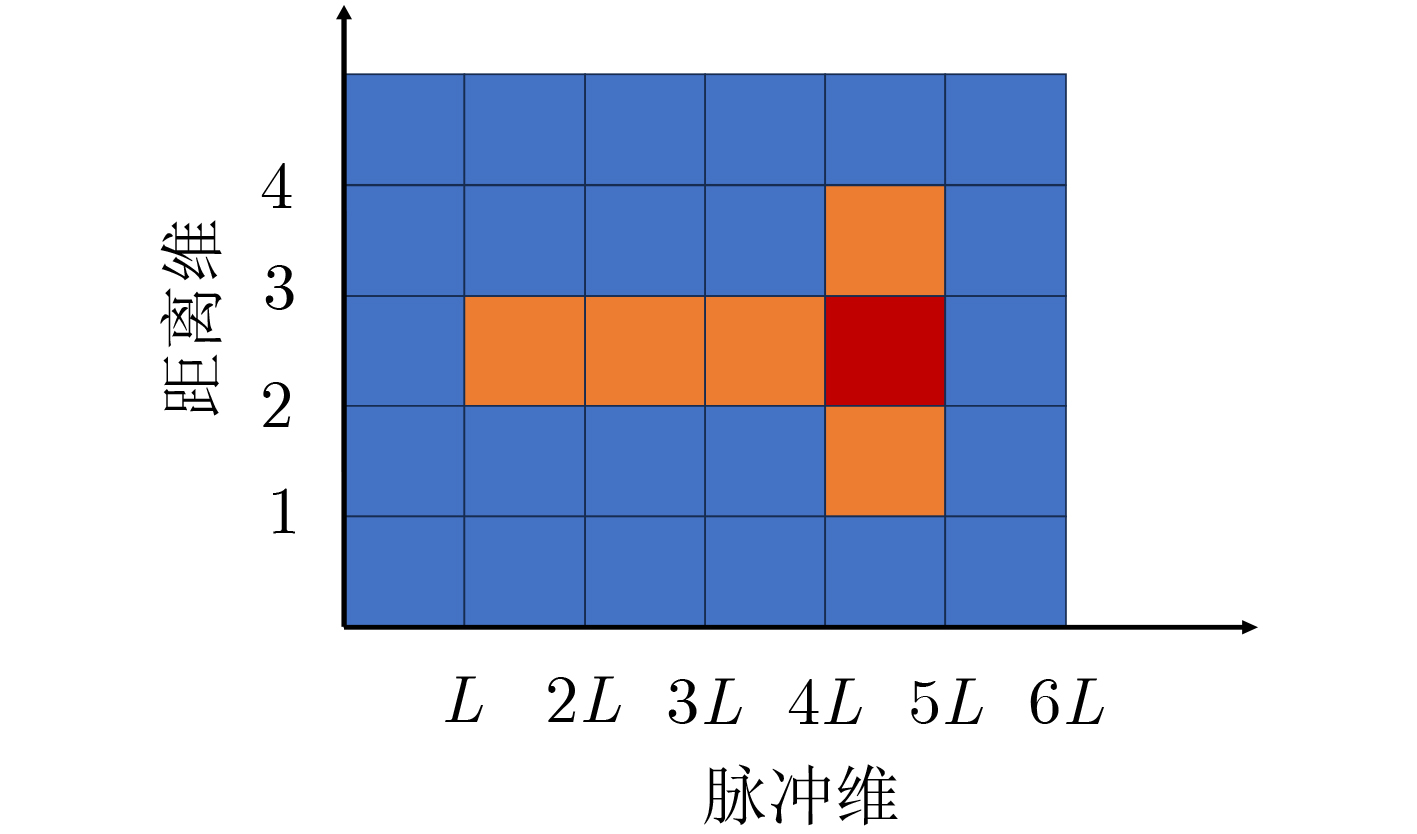
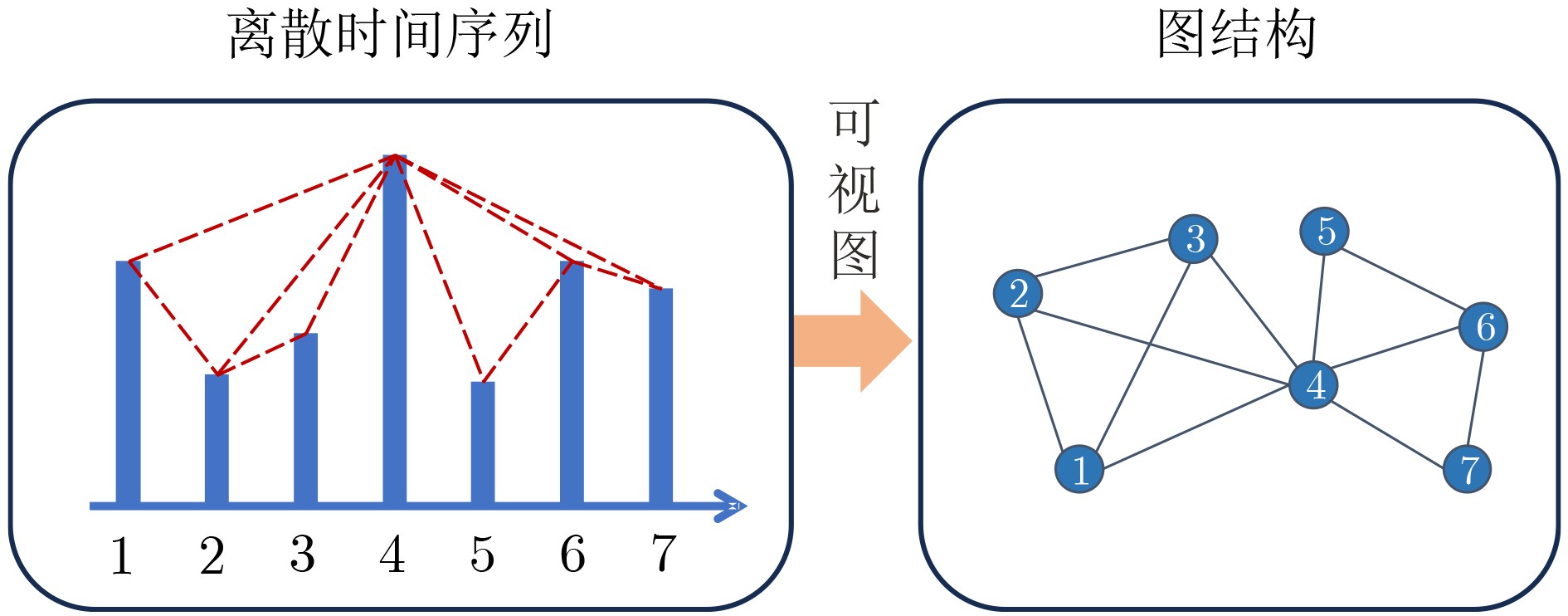
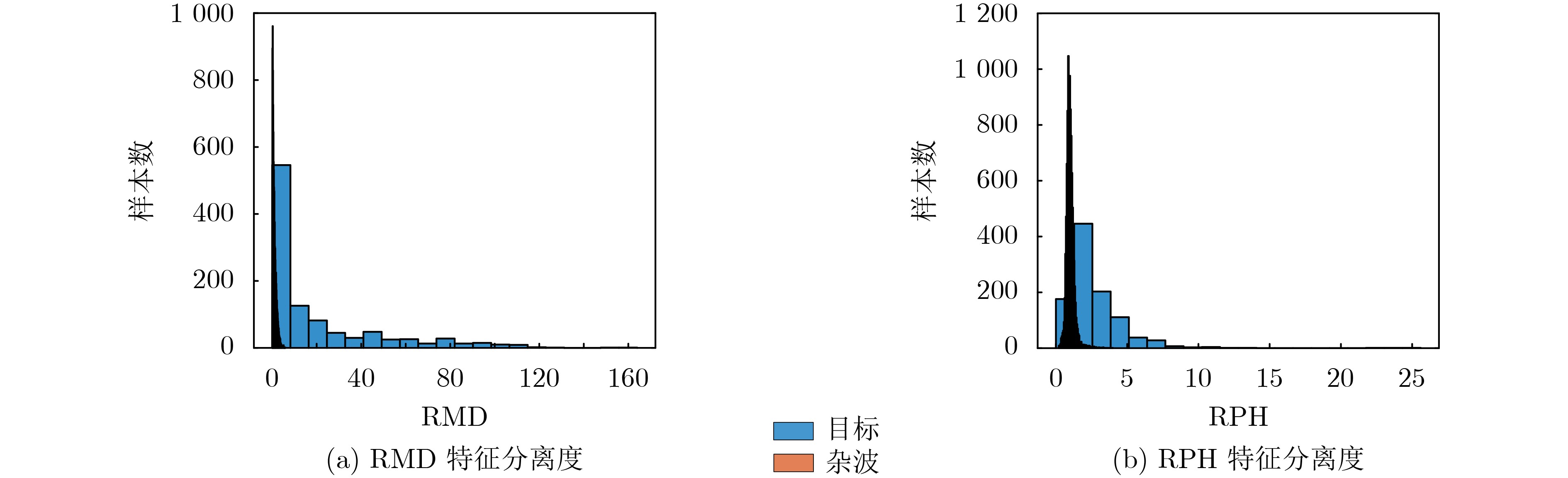
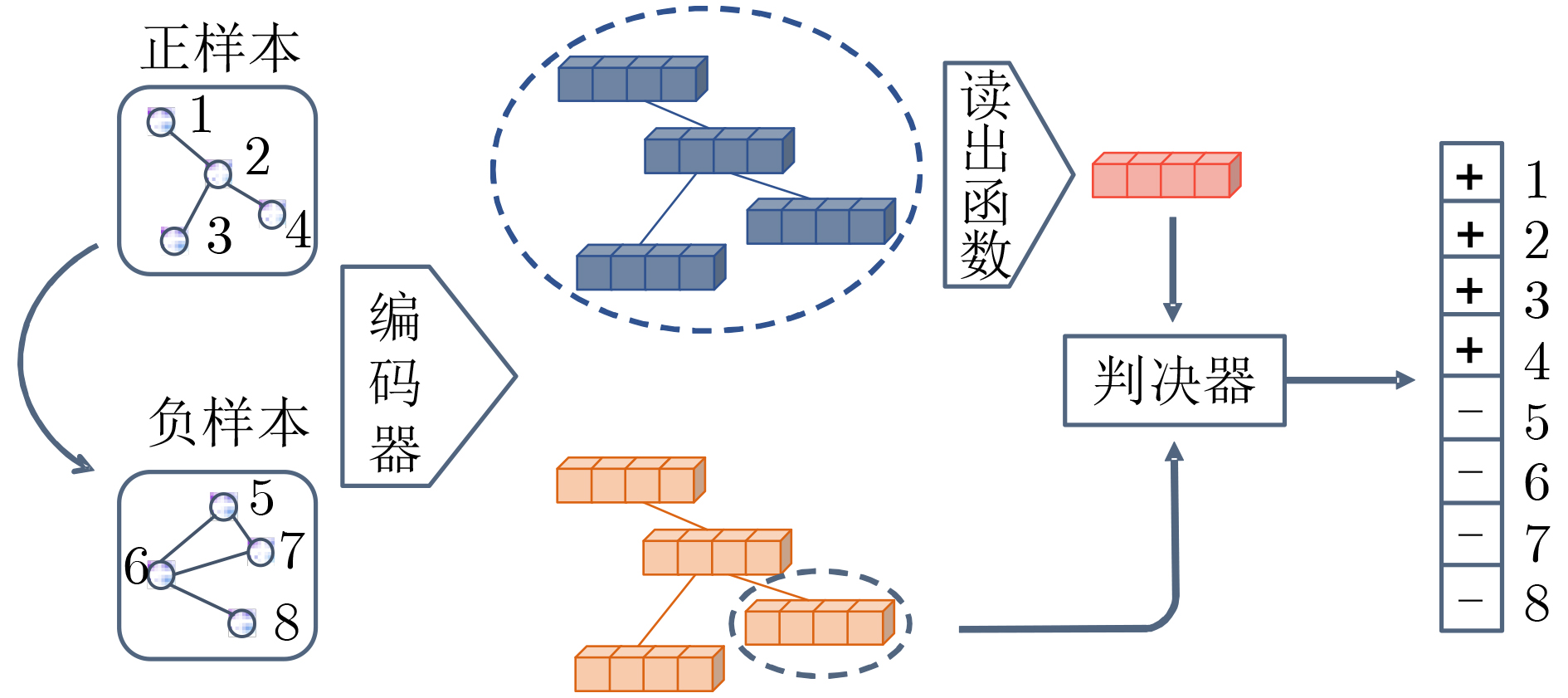
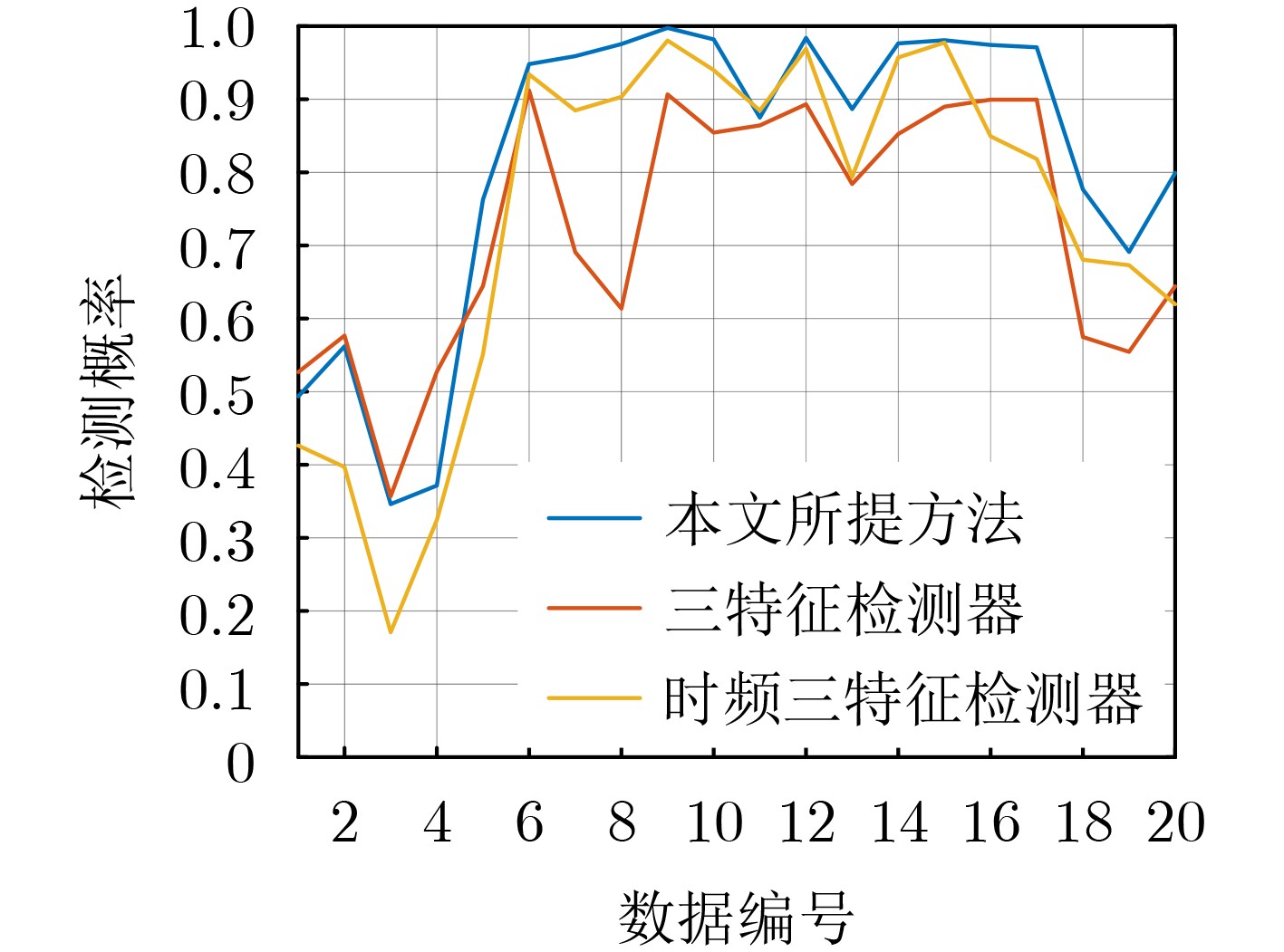
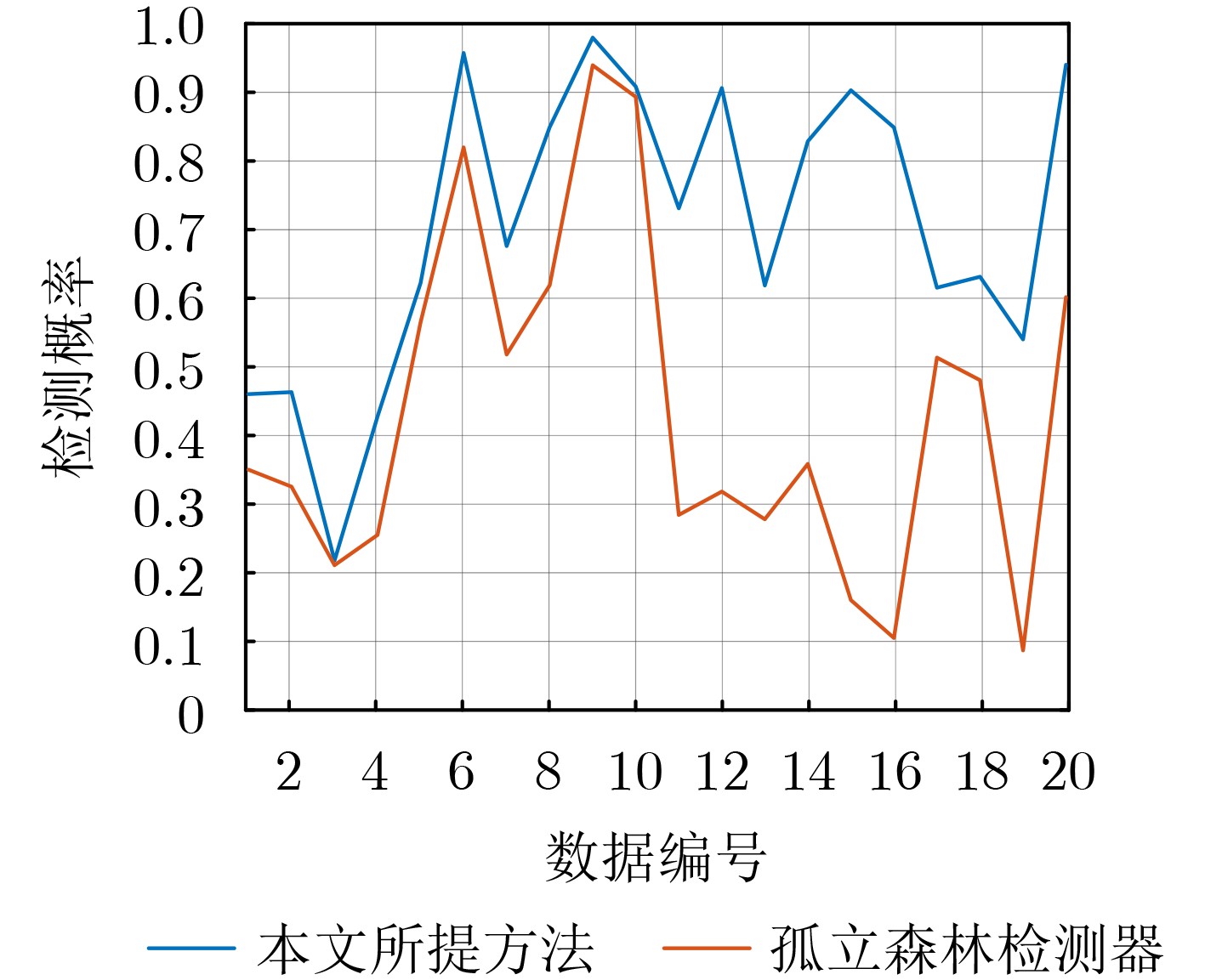
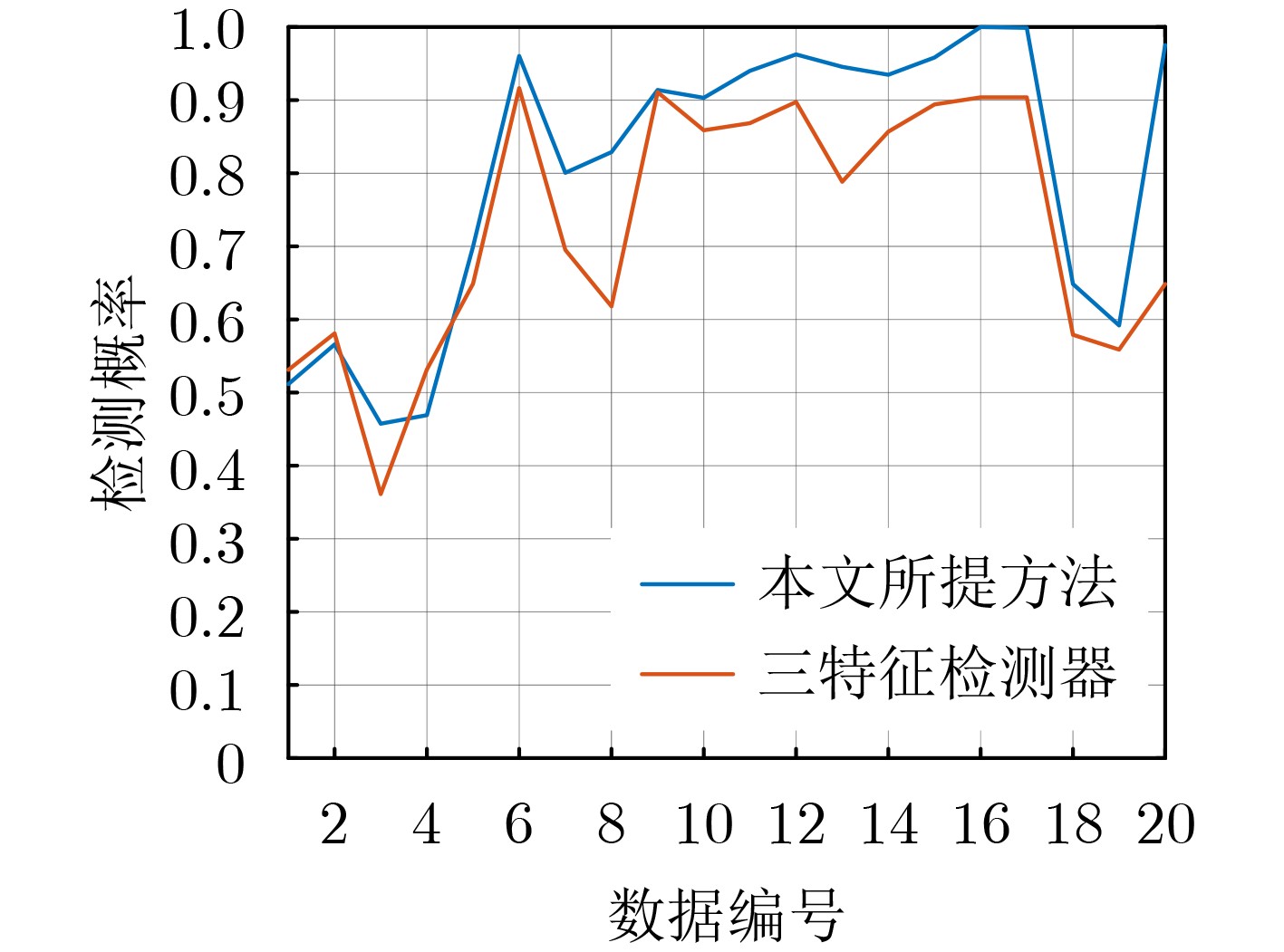
摘要: 受到复杂海洋环境的影响,雷达对海面慢速小目标难以实现高性能检测。对于这类目标,传统的基于能量的统计检测方法存在着严重的性能损失。针对这一问题,该文提出了基于互信息最大化框架下的海面小目标检测方法,实现海杂波背景下的无监督目标异常检测任务。首先,考虑到高分辨雷达回波不满足传统神经网络对样本独立同分布的假设,该文从图的角度重新建模数据,利用回波的空时相关特性来构建图拓扑结构。该文提出相对最大节点度并联合7个已有特征作为节点的初始表示向量。接下来,采用图注意力网络作为互信息最大化框架中的编码器学习节点表示向量。最后,使用异常检测算法进行目标检测,并实现虚警可控。经实测数据验证,使用快速凸包学习算法时,相比三特征检测器,所提检测器性能提升了9.2%;相比时频三特征检测器,性能提升了7.9%。当网络输出更高维的表示向量时,使用孤立森林算法的检测器的性能提升了27.4%。Abstract: Due to the complex marine environment, it is difficult for a maritime radar to achieve high-performance detection of slow and small targets on the sea surface. For such targets, the traditional energy-based statistical detection algorithms suffer from serious performance loss. Confronted with this problem, a detection algorithm of small targets based on Deep Graph Infomax framework is proposed to realize unsupervised target anomaly detection in the background of sea clutter. In the traditional neural networks, there is an assumption that the samples are independent and identically distributed, which, however, the high-resolution radar echo does not meet. Therefore, this paper re-models the data from the perspective of graph and constructs the graph topological structure according to the correlation characteristics of the echo. Moreover, this paper puts forward the relative maximum node degree, and combines it with the relative average amplitude and the relative Doppler vector entropy to be the initial representation vectors of the graph nodes. With the graph modeling done, the graph attention network is used as the encoder in the Deep Graph Infomax framework to learn representation vectors. Finally, the anomaly detection algorithm is used to detect the targets, and the false alarm can be controlled. The detection result on the measured datasets shows that the performance of the proposed detector is improved by 9.2% compared to the three-feature detector when using the fast convex hull learning algorithm. Compared to the time-frequency three-feature detector, the performance is improved by 7.9%. When the network outputs a higher-dimensional representation vectors, the performance of the detector using the isolated forest algorithm is improved by 27.4%.
-
Key words:
- Sea clutter /
- Target detection /
- Graph neural network /
- Unsupervised learning
-
表 1 快速凸包算法在IPIX数据集20组数据不同极化情况下平均检测概率
检测器 HH HV VH VV 平均 三特征检测器 0.6544 0.7825 0.8222 0.6343 0.7234 时频三特征检测器 0.6961 0.7911 0.8173 0.6426 0.7368 本文所提检测器 0.7800 0.8505 0.8749 0.7574 0.8157  下载: 导出CSV
下载: 导出CSV
表 2 孤立森林算法在IPIX数据集20组数据不同极化情况下平均检测概率
检测器 HH HV VH VV 平均 8特征孤立森林检测器 0.3269 0.5085 0.5623 0.2998 0.4244 本文所提检测器 0.5965 0.8001 0.8252 0.5716 0.6983
下载: 导出CSV
-
[1] 许述文, 白晓惠, 郭子薰, 等. 海杂波背景下雷达目标特征检测方法的现状与展望[J]. 雷达学报, 2020, 9(4): 684–714. doi: 10.12000/JR20084.XU Shuwen, BAI Xiaohui, GUO Zixun, et al. Status and prospects of feature-based detection methods for floating targets on the sea surface[J]. Journal of Radars, 2020, 9(4): 684–714. doi: 10.12000/JR20084. [2] HU Jing, TUNG W W, and GAO Jianbo. Detection of low observable targets within sea clutter by structure function based multifractal analysis[J]. IEEE Transactions on Antennas and Propagation, 2006, 54(1): 136–143. doi: 10.1109/TAP.2005.861541. [3] SHI Sainan and SHUI Penglang. Sea-surface floating small target detection by one-class classifier in time-frequency feature space[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(11): 6395–6411. doi: 10.1109/TGRS.2018.2838260. [4] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/taes.2014.120657. [5] LI Yuzhou, XIE Pengcheng, TANG Zeshen, et al. SVM-based sea-surface small target detection: A false-alarm-rate-controllable approach[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(8): 1225–1229. doi: 10.1109/LGRS.2019.2894385. [6] 郭子薰, 水鹏朗, 白晓惠, 等. 海杂波中基于可控虚警K近邻的海面小目标检测[J]. 雷达学报, 2020, 9(4): 654–663. doi: 10.12000/JR20055.GUO Zixun, SHUI Penglang, BAI Xiaohui, et al. Sea-Surface small target detection based on K-NN with controlled false alarm rate in sea clutter[J]. Journal of Radars, 2020, 9(4): 654–663. doi: 10.12000/JR20055. [7] 苏宁远, 陈小龙, 陈宝欣, 等. 雷达海上目标双通道卷积神经网络特征融合智能检测方法[J]. 现代雷达, 2019, 41(10): 47–52,57. doi: 10.16592/j.cnki.1004-7859.2019.10.009.SU Ningyuan, CHEN Xiaolong, CHEN Baoxin, et al. Dual-channel convolutional neural networks feature fusion method for radar maritime target intelligent detection[J]. Modern Radar, 2019, 41(10): 47–52,57. doi: 10.16592/j.cnki.1004-7859.2019.10.009. [8] WAN Hao, TIAN Xiaoqing, LIANG Jing, et al. Sequence-feature detection of small targets in sea clutter based on Bi-LSTM[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 4208811. doi: 10.1109/TGRS.2022.3198124. [9] YAN Kun, BAI Yu, WU H C, et al. Robust target detection within sea clutter based on graphs[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(9): 7093–7103. doi: 10.1109/TGRS.2019.2911451. [10] 时艳玲, 姚婷婷, 郭亚星. 基于图连通密度的海面漂浮小目标检测[J]. 电子与信息学报, 2021, 43(11): 3185–3192. doi: 10.11999/JEIT201028.SHI Yanling, YAO Tingting, and GUO Yaxing. Floating small target detection based on graph connected density in sea surface[J]. Journal of Electronics & Information Technology, 2021, 43(11): 3185–3192. doi: 10.11999/JEIT201028. [11] 许述文, 焦银萍, 白晓惠, 等. 基于频域多通道图特征感知的海面小目标检测[J]. 电子与信息学报, 2023, 45(5): 1567–1574. doi: 10.11999/JEIT220188.XU Shuwen, JIAO Yinping, BAI Xiaohui, et al. Small target detection based on frequency domain multichannel graph feature perception on sea surface[J]. Journal of Electronics & Information Technology, 2023, 45(5): 1567–1574. doi: 10.11999/JEIT220188. [12] SU Ningyuan, CHEN Xiaolong, GUAN Jian, et al. Maritime target detection based on radar graph data and graph convolutional network[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4019705. doi: 10.1109/lgrs.2021.3133473. [13] CHEN Simin, FENG Chen, HUANG Yong, et al. Small target detection in x-band sea clutter using the visibility graph[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5115011. doi: 10.1109/TGRS.2022.3186283. [14] VELIČKOVIĆ P, FEDUS W, HAMILTON W L, et al. Deep graph infomax[J]. arXiv: 1809.10341, 2018. doi: 10.48550/arXiv.1809.10341. [15] VELIČKOVIĆ P, CUCURULL G, CASANOVA A, et al. Graph attention networks[C]. Proceedings of the 6th International Conference on Learning Representations, Vancouver, BC, Canada, 2018. [16] LACASA L, LUQUE B, BALLESTEROS F, et al. From time series to complex networks: The visibility graph[J]. Proceedings of the National Academy of Sciences of the United States of America, 2008, 105(13): 4972–4975. doi: 10.1073/pnas.07092471. [17] BRUNA J, ZAREMBA W, SZLAM A, et al. Spectral networks and locally connected networks on graphs[J]. arXiv: 1312.6203, 2013. doi: 10.48550/arXiv.1312.6203. [18] DEFFERRARD M, BRESSON X, and VANDERGHEYNST P. Convolutional neural networks on graphs with fast localized spectral filtering[C]. Proceedings of the 30th International Conference on Neural Information Processing Systems, Barcelona, Spain, 2016. [19] KIPF T N and WELLING M. Semi-supervised classification with graph convolutional networks[C]. Proceedings of the 5th International Conference on Learning Representations, Toulon, France, 2017. [20] LIU F T, TING Kaiming, and ZHOU Zhihua. Isolation forest[C]. Proceedings of the 8th IEEE International Conference on Data Mining, Pisa, Italy, 2008: 413–422. doi: 10.1109/ICDM.2008.17. [21] XU Shuwen, ZHU Jianan, JING Junzheng, et al. Sea-surface floating small target detection by multifeature detector based on isolation forest[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 704–715. doi: 10.1109/JSTARS.2020.3033063. [22] ECHARD J D. Estimation of radar detection and false alarm probability[J]. IEEE Transactions on Aerospace and Electronic Systems, 1991, 27(2): 255–260. doi: 10.1109/7.78300. -

 下载:
下载:



图(12) / 表(2)
计量
- 文章访问数: 865
- HTML全文浏览量: 509
- PDF下载量: 105
- 被引次数: 0
