

An Anti-jamming Power Control Algorithm for Wireless Communication System Based on Disturbance Observer
-
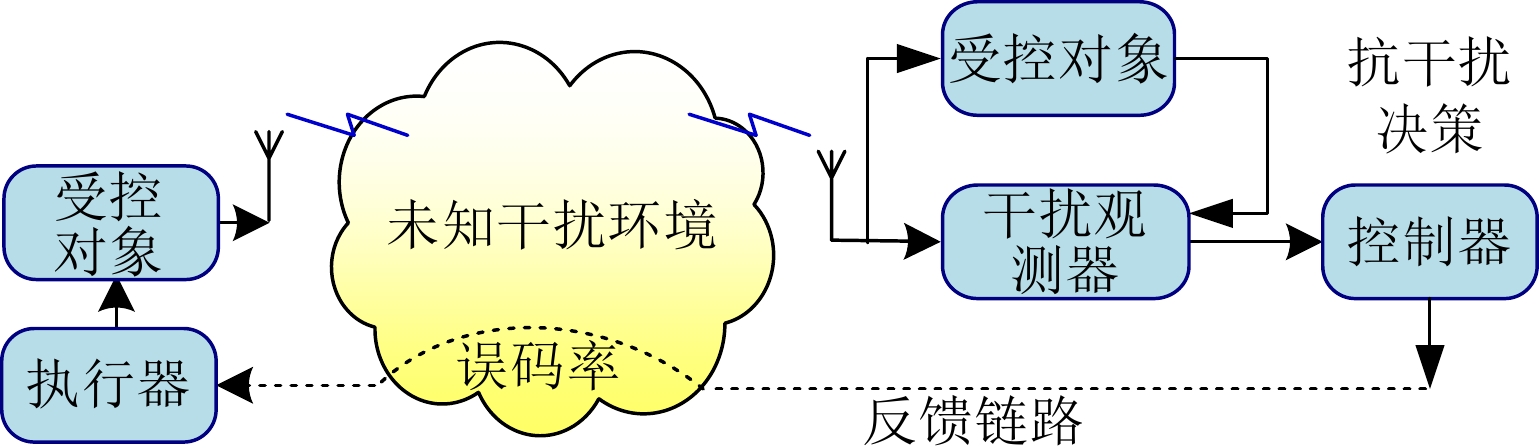
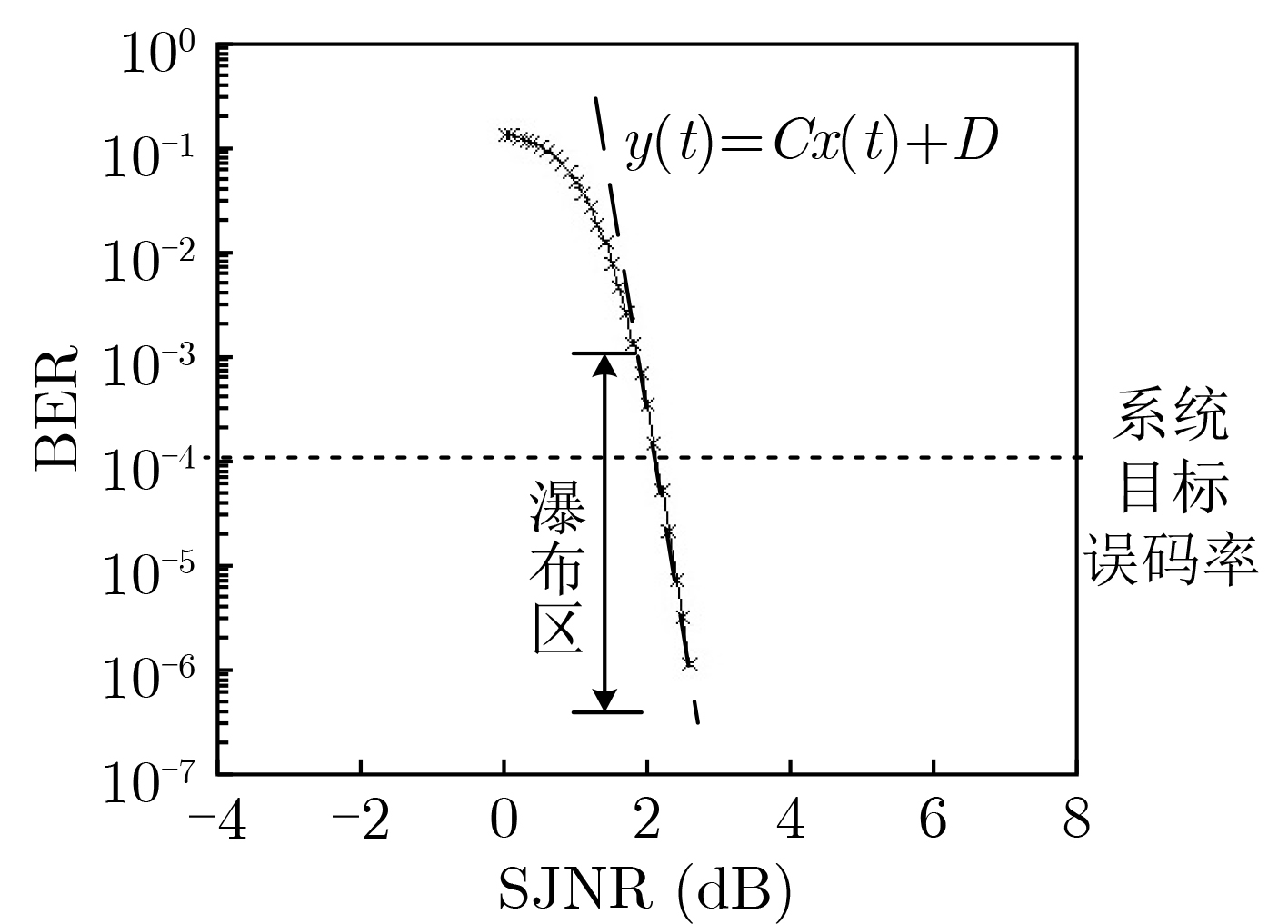
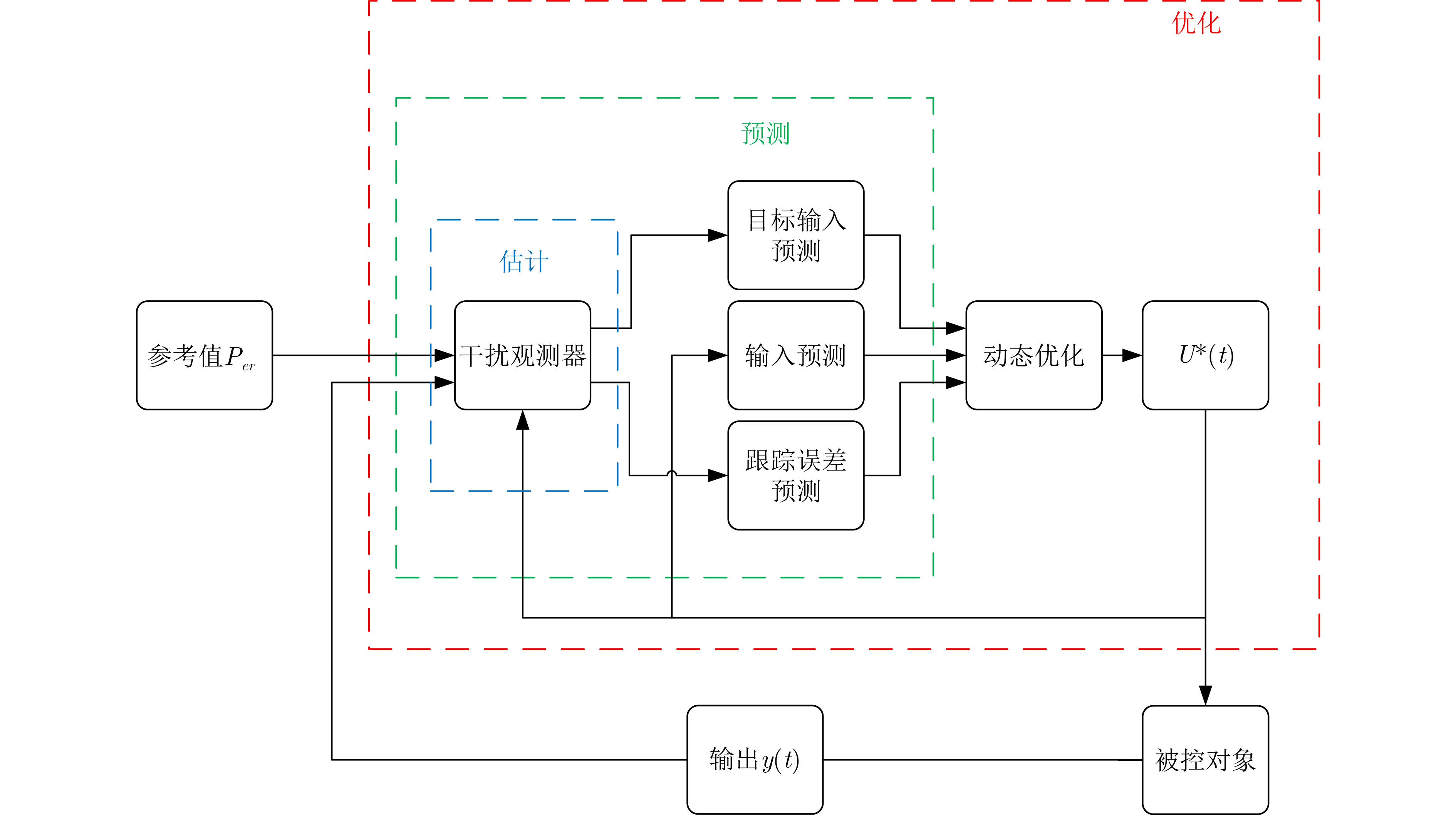
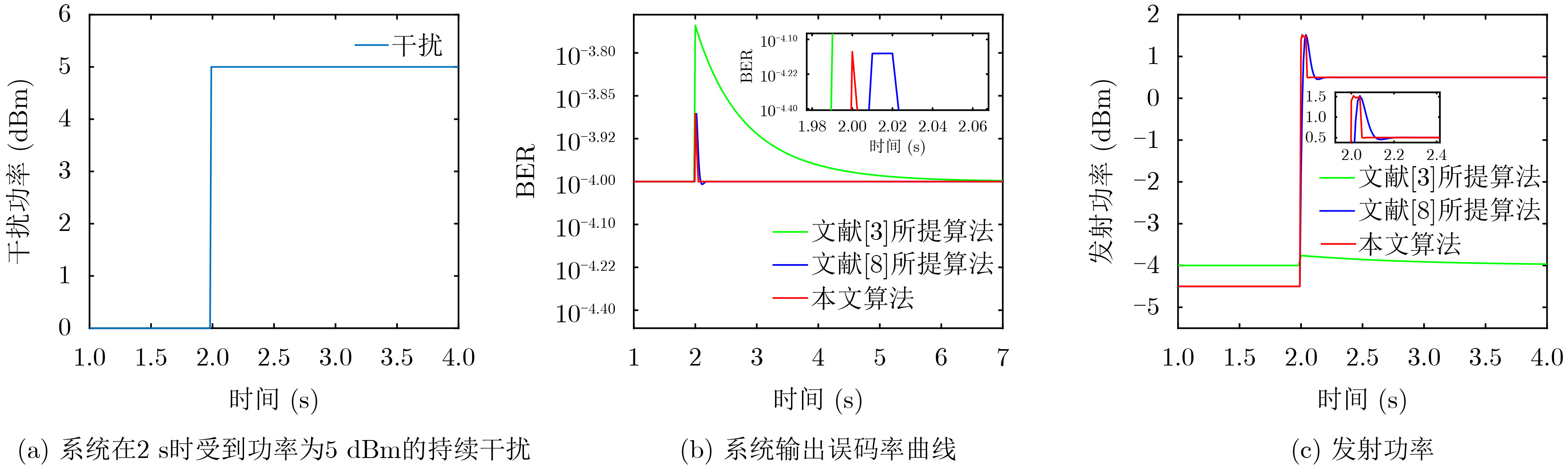
摘要: 在快速变化的干扰环境下,无线通信系统传输可靠性会受到很大影响。为提升快速时变干扰环境下无线通信系统传输的可靠性,该文提出一种基于干扰观测的无线通信系统抗干扰功率控制算法。该算法首先将受到干扰影响的无线通信系统建模为广义稳定性控制系统,并采用干扰观测器生成系统状态受干扰影响的估计值。然后通过利用估计值来预测未来的跟踪误差和稳态的控制输入,优化系统的控制策略以实现对干扰环境的自适应调整。最后仿真结果表明,与传统方法相比,所提算法能够快速响应干扰变化,显著提高系统在快速时变恶意干扰下传输的可靠性,提高了系统对干扰环境的适应能力。Abstract: In the rapidly changing jamming environment, the transmission reliability of wireless communication systems can be significantly impacted. To enhance the transmission reliability of wireless communication systems under such fast-changing jamming conditions, a disturbance observer-based anti-jamming power control algorithm is proposed. The proposed algorithm first models the wireless communication system affected by jamming as a generalized stability control system and utilizes a disturbance observer to generate estimated values of the system state impacted by jamming. Subsequently, by using these estimated values to predict future tracking errors and steady-state control inputs, the algorithm optimizes the system's control strategy to achieve adaptive adjustments in response to the jamming environment. The simulation results demonstrate that, compared to conventional methods, the proposed algorithm can rapidly respond to changes in jamming, significantly improving the system’s transmission reliability under rapidly changing malicious jamming, and enhancing the system’s adaptability to jamming environments.
-
Key words:
- Wireless communication /
- Anti-jamming /
- Stability control /
- Model predictive control
-
[1] 姚富强. 通信抗干扰工程与实践[M]. 2版. 北京: 电子工业出版社, 2012.YAO Fuqiang. Communication Anti-Jamming Engineering and Practice[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2012. [2] 杨正, 郑云, 余月好, 等. 基于自适应功率分裂的协作非正交多址接入无线携能通信网络性能分析[J]. 通信学报, 2023, 44(1): 177–188. doi: 10.11959/j.issn.1000−436x.2023004YANG Zheng, ZHENG Yun, YU Yuehao, et al. Performance analysis for cooperative NOMA networks based SWIPT with adaptive power splitting[J]. Journal on Communications, 2023, 44(1): 177–188. doi: 10.11959/j.issn.1000−436x.2023004 [3] 苏炎荣, 徐卓农, 吴舒辞. 一种功率自适应控制方案在移动自组网的应用[J]. 自动化技术与应用, 2008, 27(11): 60–62. doi: 10.3969/j.issn.1003-7241.2008.11.017SU Yanrong, XU Zhuonong, and WU Shuci. A power-adaptive control protocol for MANET[J]. Techniques of Automation and Applications, 2008, 27(11): 60–62. doi: 10.3969/j.issn.1003-7241.2008.11.017 [4] 苗丽娟, 李锦涛. 无线传感器网络功率自适应控制算法研究[J]. 信息技术与信息化, 2023(6): 214–217. doi: 10.3969/j.issn.1672-9528.2023.06.054MIAO Lijuan and LI Jintao. Research on power adaptive control algorithm for wireless sensor network[J]. Information Technology Informatization, 2023(6): 214–217. doi: 10.3969/j.issn.1672-9528.2023.06.054 [5] 陈文泰. 基于机器学习的蜂窝网络D2D通信频谱分配与功率控制算法研究[D]. [硕士论文], 东南大学, 2019.CHEN Wentai. A study on machine learning based spectrum allocation and power control algorithms for D2D communications underlaying cellular networks[D]. [Master dissertation], Southeast University, 2019. [6] ZHOU Quan, NIU Yingtao, XIANG Peng, et al. Intra-domain knowledge reuse assisted reinforcement learning for fast anti-jamming communication[J]. IEEE Transactions on Information Forensics and Security, 2023, 18: 4707–4720. doi: 10.1109/TIFS.2023.3284611 [7] JIA Ruibao, LIU Liu, ZHENG Xufei, et al. Multi-agent deep reinforcement learning for uplink power control in multi-cell systems[C]. 2022 IEEE International Conference on Communications Workshops, Seoul, South, Korea, 2022: 324–330. [8] TONG Tingting, SONG Xiaoqin, NIU Yingtao, et al. Stability control of power adaptation in wireless communication system[C]. 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer, Shenyang, China, 2013: 287–291. [9] SONG Xiaoqin, DONG Li, LI Wenfa, et al. Stability control of multi-parameter adaptive wireless communication systems based on multi-Lyapunov function[J]. High Technology Letters, 2017, 23(4): 375–383. doi: 10.3772/j.issn.1006-6748.2017.04.005 [10] YAN Yunda, YANG Jun, SUN Zhenxing, et al. Non-linear-disturbance-observer-enhanced MPC for motion control systems with multiple disturbances[J]. IET Control Theory & Applications, 2020, 14(1): 63–72. doi: 10.1049/iet-cta.2018.5821 [11] ZHANG Lu, YANG Jun, LI Shihua, et al. Invariant manifold based output-feedback sliding mode control for systems with mismatched disturbances[J]. IEEE Transactions on Circuits and Systems II:Express Briefs, 2021, 68(3): 933–937. doi: 10.1109/TCSII.2020.3011458 [12] PANNOCCHIA G and BEMPORAD A. Combined design of disturbance model and observer for offset-free model predictive control[J]. IEEE Transactions on Automatic Control, 2007, 52(6): 1048–1053. doi: 10.1109/TAC.2007.899096 [13] YANG Jun, ZHENG Weixing, LI Shihua, et al. Design of a prediction-accuracy-enhanced continuous-time MPC for disturbed systems via a disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5807–5816. doi: 10.1109/TIE.2015.2450736 [14] CHEN Wenhua, BALANCE D J, and GAWTHROP P J. Optimal control of nonlinear systems: A predictive control approach[J]. Automatica, 2003, 39(4): 633–641. doi: 10.1016/S0005-1098(02)00272-8 [15] LEVANT A. Higher-order sliding modes, differentiation and output-feedback control[J]. International Journal of Control, 2003, 76(9/10): 924–941. doi: 10.1080/0020717031000099029 -

 下载:
下载:




图(6)
计量
- 文章访问数: 1127
- HTML全文浏览量: 821
- PDF下载量: 118
- 被引次数: 0
