

Spectrum Map Construction Algorithm Based on Tensor Tucker Decomposition
-
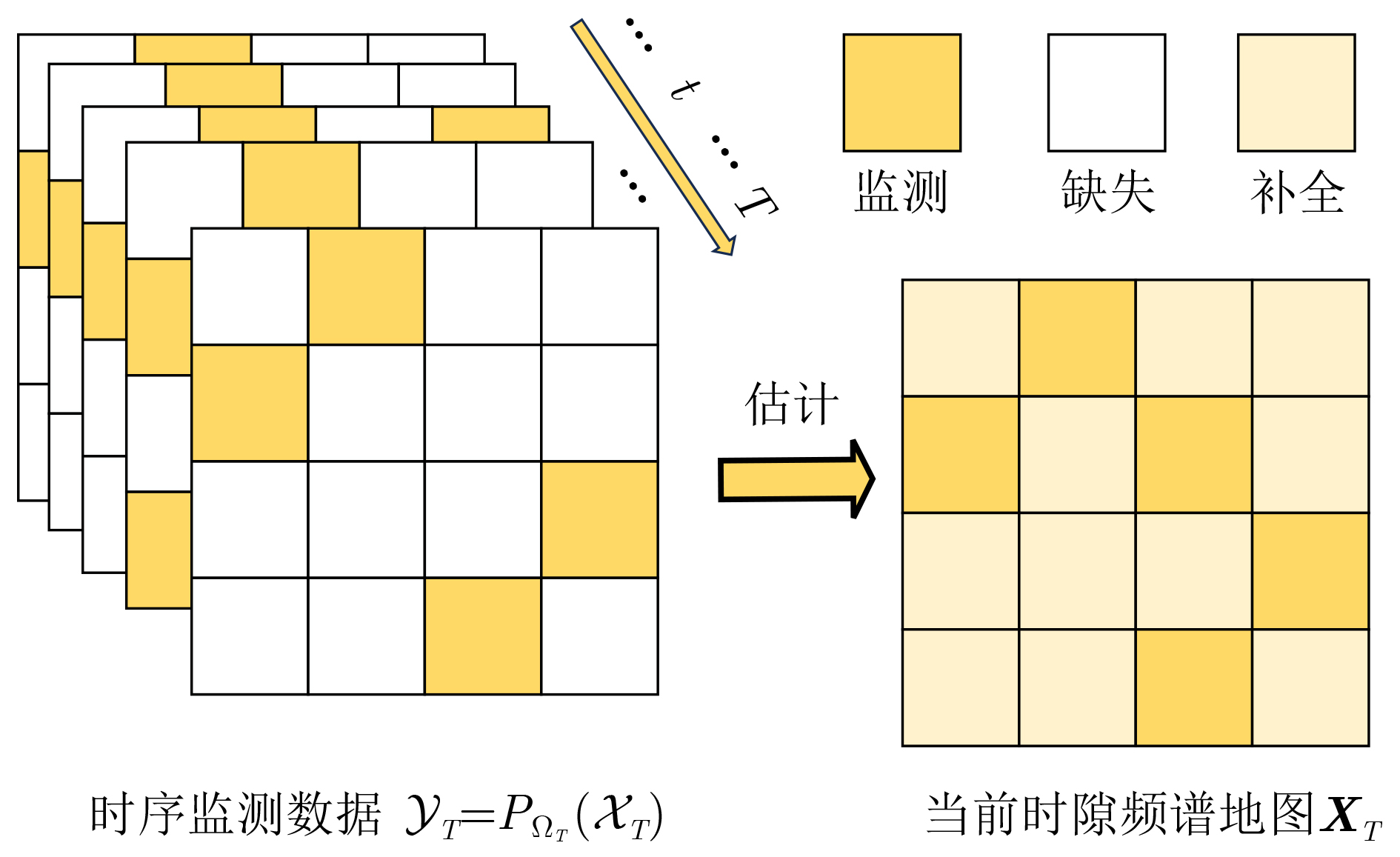
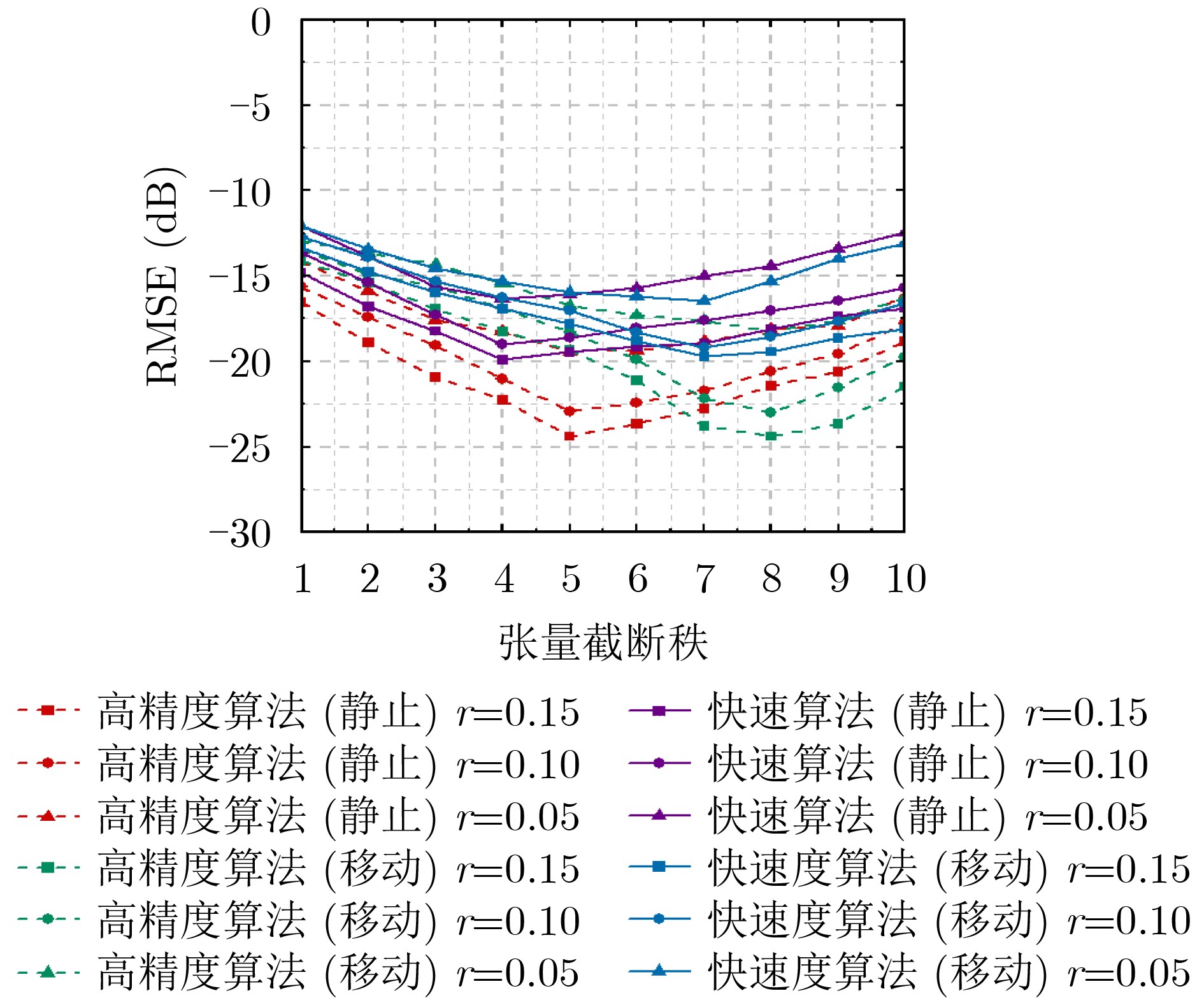
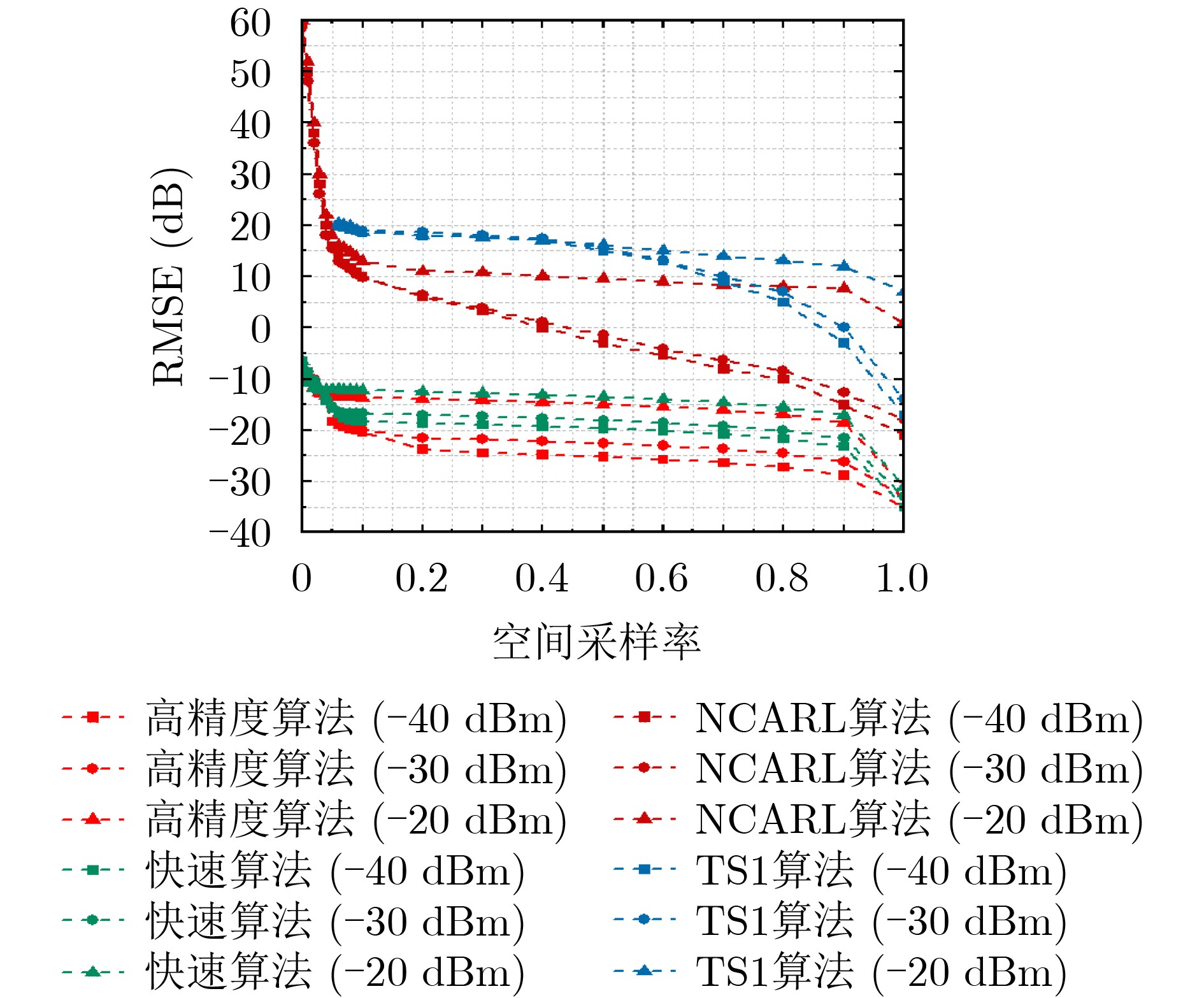
摘要: 该文研究使用少量监测样本数据构建动态电磁环境频谱地图。首先,将动态电磁环境的时变频谱地图建模为3维频谱张量,通过张量Tucker分解提取出具有物理意义的核张量和因子矩阵等低维特征。其次,根据频谱张量时域、空域、频域之间的相关性以及监测样本数据的稀疏性,设计一种基于Tucker分解的低秩张量补全模型,将频谱地图构建任务转化为数据缺失的低秩张量补全问题,并提出两种无需先验信息的频谱地图构建算法:高精度频谱地图构建算法和快速频谱地图构建算法。前者采用交替最小二乘法对核张量和因子矩阵交替求解,通过“补全-分解”的迭代过程实现对频谱地图的高精度构建。后者采用序列截断高阶奇异值分解法,对潜在多个低秩近似张量加权平均,该算法具有收敛快速和计算复杂度低的优势,在牺牲少量构建精度的情况下能够快速构建频谱地图。仿真实验结果表明,该文提出的两种算法能够精确构建频谱地图,在构建精度、运行时间消耗和噪声鲁棒性上均优于对比算法。Abstract: This paper investigates the construction of dynamic electromagnetic spectrum maps using a limited amount of monitored sample data. First, the time-varying spectrum maps of the dynamic electromagnetic environment are modeled as three-dimensional spectrum tensors. The tensor Tucker decomposition is then employed to extract low-dimensional features, including physically meaningful core tensors and factor matrices. Second, a low-rank tensor completion model based on the Tucker decomposition is designed considering the correlation between the temporal, spatial, and frequency domains of the spectrum tensorand and the sparsity of the monitored sample data. This model transforms the spectrum map construction task into an optimization problem of completing low-rank tensors with missing data. To address this problem, this paper proposes two spectrum map construction algorithms that do not rely on prior information: high-precision and fast spectrum map construction algorithms. The former employs an alternating least squares method for iteratively solving the core tensor and factor matrices, achieving high-precision spectrum map construction through a “completion-decomposition” process. Meanwhile, the latter employs a sequential truncated higher-order singular value decomposition method for averaging multiple low-rank approximate tensors, offering rapid convergence and low computational complexity. Therefore, this algorithm can quickly construct spectrum maps by sacrificing a small amount of construction accuracy. The simulation results show that the proposed algorithms can accurately construct spectrum maps and outperform comparative algorithms in terms of construction accuracy, runtime consumption, and noise robustness.
-
Key words:
- Spectrum map /
- Tensor completion /
- Tensor decomposition /
- Tucker decomposition
-
算法 1 基于迭代交替最小二乘法的高精度频谱地图构建算法 输入: $ \mathcal{X} \in {\mathbb{R}^{L \times F \times T}} $,采样索引 ${\varOmega _T}$,截断秩 $\left( {{R_1},{R_2},{R_3}} \right)$ 输出: $ \hat {\mathcal{X}} $,核张量 $ \mathcal{G} $,因子矩阵 $ {\boldsymbol{S}},\; {\boldsymbol{U}}\;{\boldsymbol{V}} $, $t$时隙频谱地图 $ {{\boldsymbol{X}}_T} $ 初始化: $ {\mathcal{X}^0} = {P_{{\Omega _T}}}\left( \mathcal{X} \right) $, ${\mathcal{D}_0} \leftarrow \mathcal{O}$, $i \leftarrow 0$,初始化因子矩阵
$ {\boldsymbol{S}}\in {{\mathbb{R}}}^{S\times {R}_{1}}, {\boldsymbol{U}}\in {{\mathbb{R}}}^{F\times {R}_{2}},{\boldsymbol{V}}\in {{\mathbb{R}}}^{T\times {R}_{3}} $Repeat $ {\mathcal{Z}^i} \leftarrow {\mathcal{X}^i}{ \times _2}{{\boldsymbol{U}}^{\text{T}}}{ \times _3}{{\boldsymbol{V}}^{\text{T}}} $ ${\boldsymbol{S}} \leftarrow {\boldsymbol{Z}}_i^{(1)}$前 ${R_1}$个左奇异值向量 $ {\mathcal{Z}^i} \leftarrow {\mathcal{X}^i}{ \times _1}{{\boldsymbol{S}}^{\text{T}}}{ \times _3}{{\boldsymbol{V}}^{\text{T}}} $ ${\boldsymbol{U}} \leftarrow {\boldsymbol{Z}}_i^{(2)}$前 ${R_2}$个左奇异值向量 $ {\mathcal{Z}^i} \leftarrow {\mathcal{X}^i}{ \times _1}{{\boldsymbol{S}}^{\text{T}}}{ \times _2}{{\boldsymbol{U}}^{\text{T}}} $ ${\boldsymbol{V}} \leftarrow {\boldsymbol{Z}}_i^{(3)}$前 ${R_3}$个左奇异值向量 $ \mathcal{G}\text{ }\leftarrow {\mathcal{X}}^{i}{\times }_{1}{{\boldsymbol{S}}}^{\text{T}}{\times }_{2}{{\boldsymbol{U}}}^{\text{T}}{\times }_{3}{{\boldsymbol{V}}}^{\text{T}} $ $ {\mathcal{D}^i} \leftarrow \mathcal{G}{ \times _1}{\boldsymbol{S}}{ \times _2}{\boldsymbol{U}}{ \times _3}{\boldsymbol{V}} $ 更新对缺失数据的估计: $ {\hat {\mathcal{X}}^i} \leftarrow {P_{{\Omega _T}}}\left( {{\mathcal{X}^0}} \right) + {P_{\left( { \sim {\Omega _T}} \right)}}\left( {{\mathcal{D}^i}} \right) $ $i \leftarrow i + 1$ Until $ \frac{{\left\| {{{\hat {\mathcal{X}}}^i} - {{\hat {\mathcal{X}}}^{i - 1}}} \right\|_{\text{F}}^2}}{{\left\| {{{\hat {\mathcal{X}}}^i}} \right\|_{\text{F}}^2}} < \varepsilon $or $i > maxiterationtimes$ $ \hat {\mathcal{X}} \leftarrow {\hat{ \mathcal{X}}^i} $ $ {{\boldsymbol{X}}_T} = {\hat {\mathcal{X}}_{:,:,T}} $  下载: 导出CSV
下载: 导出CSV
算法2 基于序列截断高阶奇异值分解的快速频谱地图构建算法 输入: $ {\hat {\mathcal{X}}_{T - 1}} $, $ {P_{{\Omega _T}}}\left( {{{\boldsymbol{X}}_T}} \right) $,截断秩 $\left( {{R_1},{R_2},{R_3}} \right)$ 输出: $ {\hat {\mathcal{X}}_T} $, $t$时隙频谱地图 $ {{\boldsymbol{X}}_T} $ 初始化: $ {\mathcal{X}^0} = \left[ {{{\hat {\mathcal{X}}}_{T - 1}},{P_{{\Omega _T}}}\left( {{{\boldsymbol{X}}_T}} \right)} \right] $, ${\mathcal{D}^0} \leftarrow \mathcal{O}$, $i \leftarrow 0$ Repeat 使用HOSVD算法,对 $ {\mathcal{X}^i} $依据截断秩进行分解,得到因子矩
阵 $ {\boldsymbol{S}}\in {{\mathbb{R}}}^{S\times {R}_{1}},\;{\boldsymbol{U}}\in {{\mathbb{R}}}^{F\times {R}_{2}},\,{\boldsymbol{V}}\in {{\mathbb{R}}}^{T\times {R}_{3}} $,临时核张量
$ {\mathcal{G}^1} \leftarrow {\mathcal{X}^i}{ \times _1}{\boldsymbol{S}} $根据式(11)计算张量 $ {\mathcal{X}_T} $的第1个低秩近似 $ {\hat {\mathcal{T}}^1} $ 临时核张量 $ {\mathcal{G}^2} \leftarrow {\mathcal{X}^i}{ \times _1}{\boldsymbol{S}}{ \times _2}{\boldsymbol{U}} $ 根据式(12)计算张量 $ {\mathcal{X}_T} $的第2个低秩近似 $ {\hat {\mathcal{T}}^2} $ 临时核张量 $ {\mathcal{G}^3} \leftarrow {\mathcal{X}^i}{ \times _1}{\boldsymbol{S}}{ \times _2}{\boldsymbol{U}}{ \times _3}{\boldsymbol{V}} $ 根据式(13)计算张量 $ {\mathcal{X}_T} $的第3个低秩近似 $ {\hat {\mathcal{T}}^3} $ 计算低秩近似的平均值 $ {\mathcal{D}^i} = \dfrac{1}{3}\left( {{{\hat {\mathcal{T}}}^1} + {{\hat {\mathcal{T}}}^2} + {{\hat {\mathcal{T}}}^3}} \right) $ 更新对缺失数据的估计: $ {\hat {\mathcal{X}}^i} = {P_{{\Omega _T}}}\left( {{\mathcal{X}^0}} \right) + {P_{( \sim {\Omega _T})}}\left( {{\mathcal{D}^i}} \right) $ Until $ \frac{{\left\| {{{\hat {\mathcal{X}}}^i} - {{\hat {\mathcal{X}}}^{i - 1}}} \right\|_{\text{F}}^2}}{{\left\| {{{\hat {\mathcal{X}}}^i}} \right\|_{\text{F}}^2}} < \varepsilon $ or $i > {\rm{maxiterationtimes}}$ $ {\hat {\mathcal{X}}_T} \leftarrow {\hat {\mathcal{X}}^i} $ $ {{\boldsymbol{X}}_T} \leftarrow \hat {\mathcal{X}}_{:,:,T}^i $
下载: 导出CSV
-
[1] SHEN Feng, DING Guoru, WU Qihui, et al. Compressed wideband spectrum mapping in 3D spectrum-heterogeneous environment[J]. IEEE Transactions on Vehicular Technology, 2023, 72(4): 4875–4886. doi: 10.1109/TVT.2022.3227168 [2] ATANASOVSKI V, VAN DE BEEK J, DEJONGHE A, et al. Constructing radio environment maps with heterogeneous spectrum sensors[C]. 2011 IEEE International Symposium on Dynamic Spectrum Access Networks, Aachen, Germany, 2011: 660–661. [3] ROMERO D, KIM S J, and GIANNAKIS G B. Stochastic semiparametric regression for spectrum cartography[C]. The 2015 IEEE 6th International Workshop on Computational Advances in Multi-Sensor Adaptive Processing, Cancun, Mexico, 2015: 513–516. [4] HAMID M and BEFERULL-LOZANO B. Non-parametric spectrum cartography using adaptive radial basis functions[C]. 2017 IEEE International Conference on Acoustics, Speech and Signal Processing, New Orleans, USA, 2017: 3599–3603. [5] ROMERO D, SHRESTHA R, TEGANYA Y, et al. Aerial spectrum surveying: Radio map estimation with autonomous UAVs[C]. The 2020 IEEE 30th International Workshop on Machine Learning for Signal Processing, Espoo, Finland, 2020: 1–6. [6] KIM S J and GIANNAKIS G B. Cognitive radio spectrum prediction using dictionary learning[C]. 2013 IEEE Global Communications Conference, Atlanta, USA, 2013: 3206–3211. [7] HUANG D H, WU S H, WU Wenrong, et al. Cooperative radio source positioning and power map reconstruction: A sparse Bayesian learning approach[J]. IEEE Transactions on Vehicular Technology, 2015, 64(6): 2318–2332. doi: 10.1109/TVT.2014.2345738 [8] HU Yongli, ZHOU Wei, WEN Zheng, et al. Efficient radio map construction based on low-rank approximation for indoor positioning[J]. Mathematical Problems in Engineering, 2013, 2013: 461089. doi: 10.1155/2013/461089 [9] KRIJESTORAC E, HANNA S, and CABRIC D. Spatial signal strength prediction using 3D maps and deep learning[C]. 2021 IEEE International Conference on Communications, Montreal, Canada, 2021: 1–6. [10] TEGANYA Y and ROMERO D. Deep completion autoencoders for radio map estimation[J]. IEEE Transactions on Wireless Communications, 2022, 21(3): 1710–1724. doi: 10.1109/TWC.2021.3106154 [11] SHEN Feng, WANG Zheng, DING Guoru, et al. 3D compressed spectrum mapping with sampling locations optimization in spectrum-heterogeneous environment[J]. IEEE Transactions on Wireless Communications, 2022, 21(1): 326–338. doi: 10.1109/TWC.2021.3095342 [12] SHRESTHA R, ROMERO D, and CHEPURI S P. Spectrum surveying: Active radio map estimation with autonomous UAVs[J]. IEEE Transactions on Wireless Communications, 2023, 22(1): 627–641. doi: 10.1109/TWC.2022.3197087 [13] SHEN Feng, DING Guoru, and WU Qihui. Efficient remote compressed spectrum mapping in 3-D spectrum-heterogeneous environment with inaccessible areas[J]. IEEE Wireless Communications Letters, 2022, 11(7): 1488–1492. doi: 10.1109/LWC.2022.3175820 [14] LI Xi, WANG Xin, SONG Tiecheng, et al. Robust online prediction of spectrum map with incomplete and corrupted observations[J]. IEEE Transactions on Mobile Computing, 2022, 21(12): 4583–4594. doi: 10.1109/TMC.2021.3081715 [15] LI Qun, SHI Xiangqiong, and SCHONFELD D. Robust HOSVD-based higher-order data indexing and retrieval[J]. IEEE Signal Processing Letters, 2013, 20(10): 984–987. doi: 10.1109/LSP.2013.2277861 [16] LI Xuelong, ZHANG Hongyuan, and ZHANG Rui. Matrix completion via non-convex relaxation and adaptive correlation learning[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(2): 1981–1991. doi: 10.1109/TPAMI.2022.3157083 [17] ZHANG Shuai, YIN Penghang, and XIN J. Transformed Schatten-1 iterative thresholding algorithms for low rank matrix completion[J]. Communications in Mathematical Sciences, 2017, 15(3): 839–862. doi: 10.4310/CMS.2017.v15.n3.a12 -


 下载:
下载:





图(7) / 表(2)
计量
- 文章访问数: 1323
- HTML全文浏览量: 990
- PDF下载量: 143
- 被引次数: 0
