

Pedestrian Trajectory Prediction Method Based on Information Fractals
-
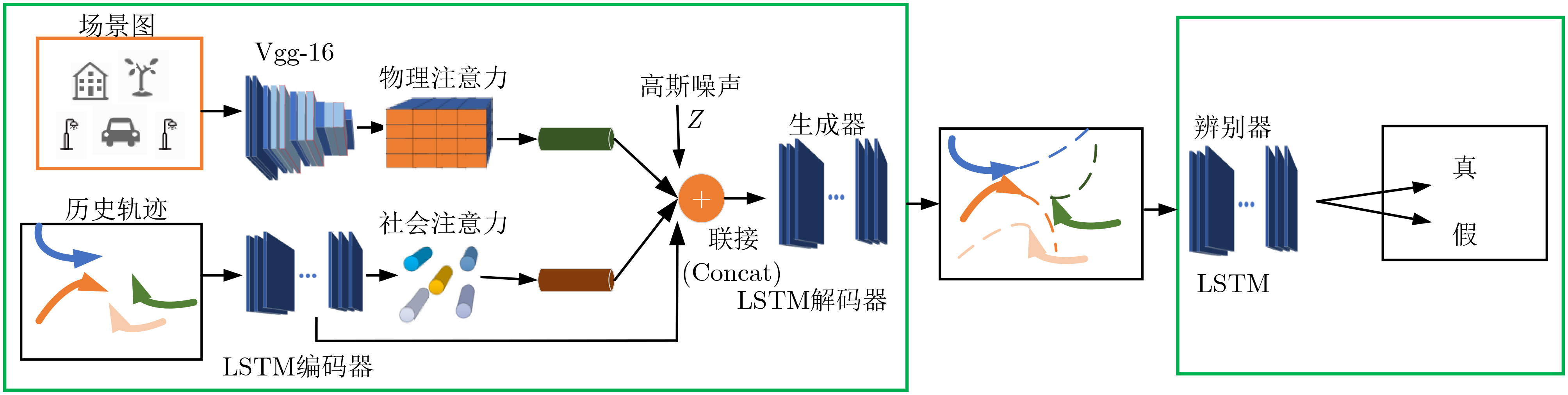
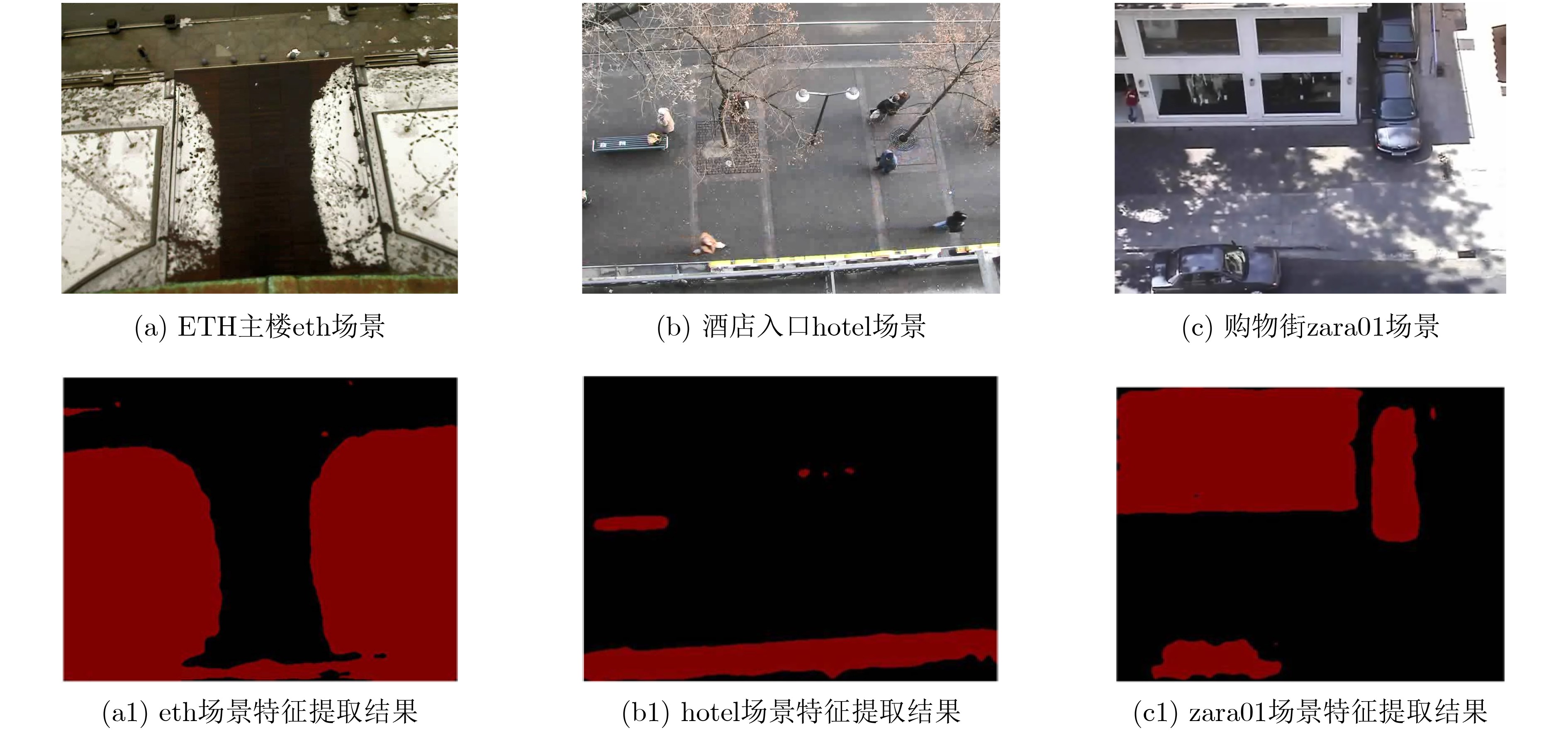
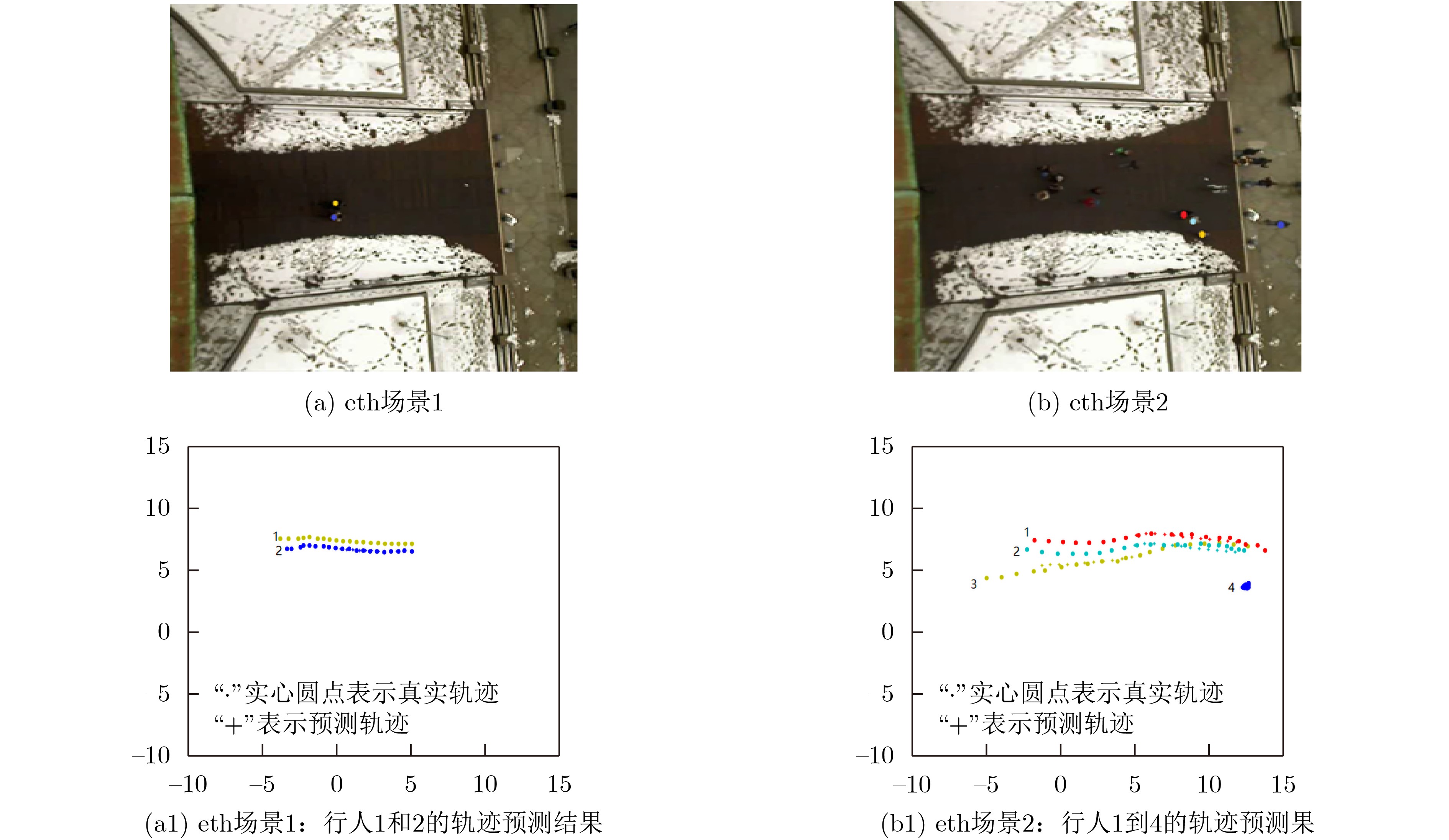
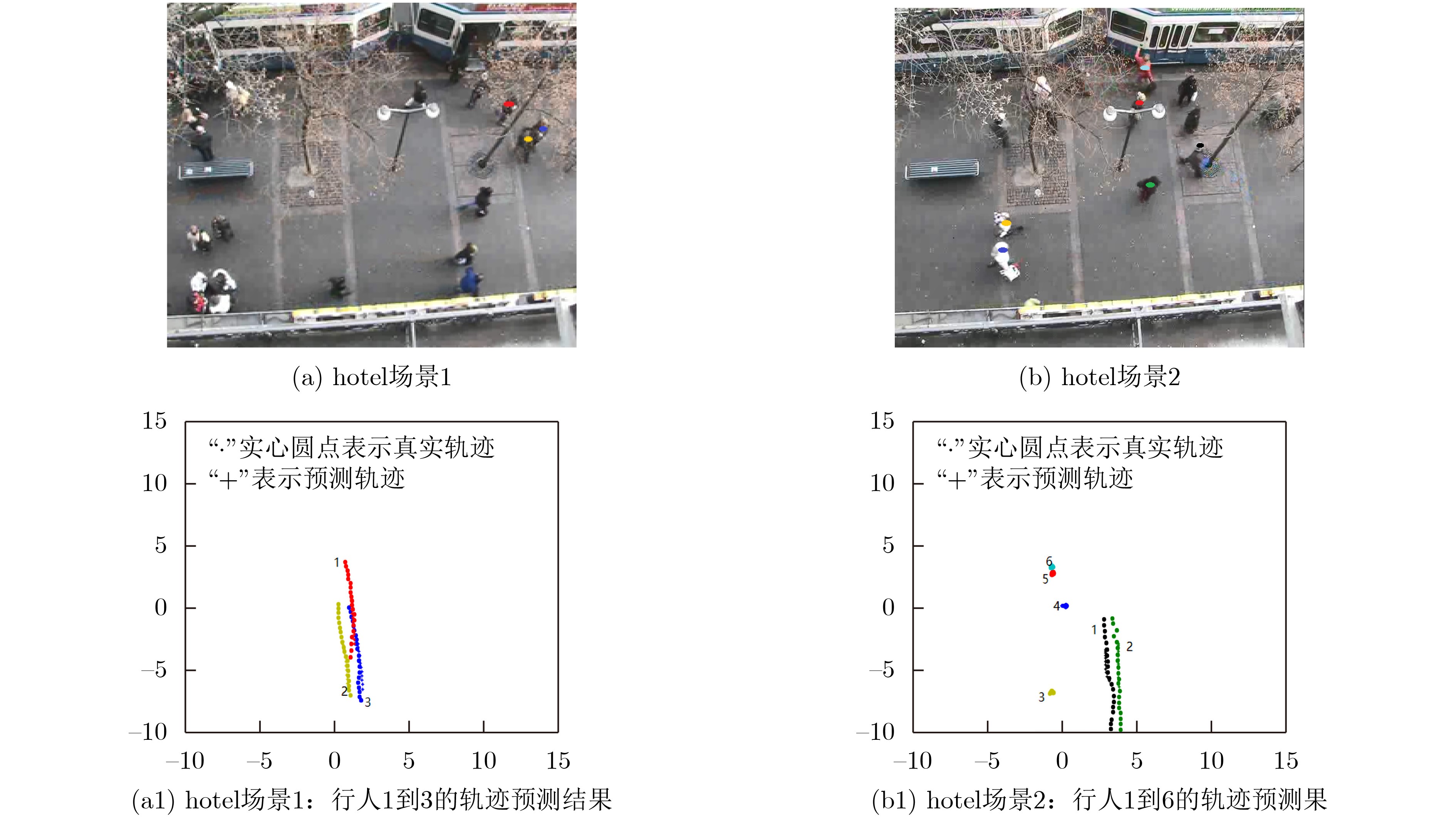
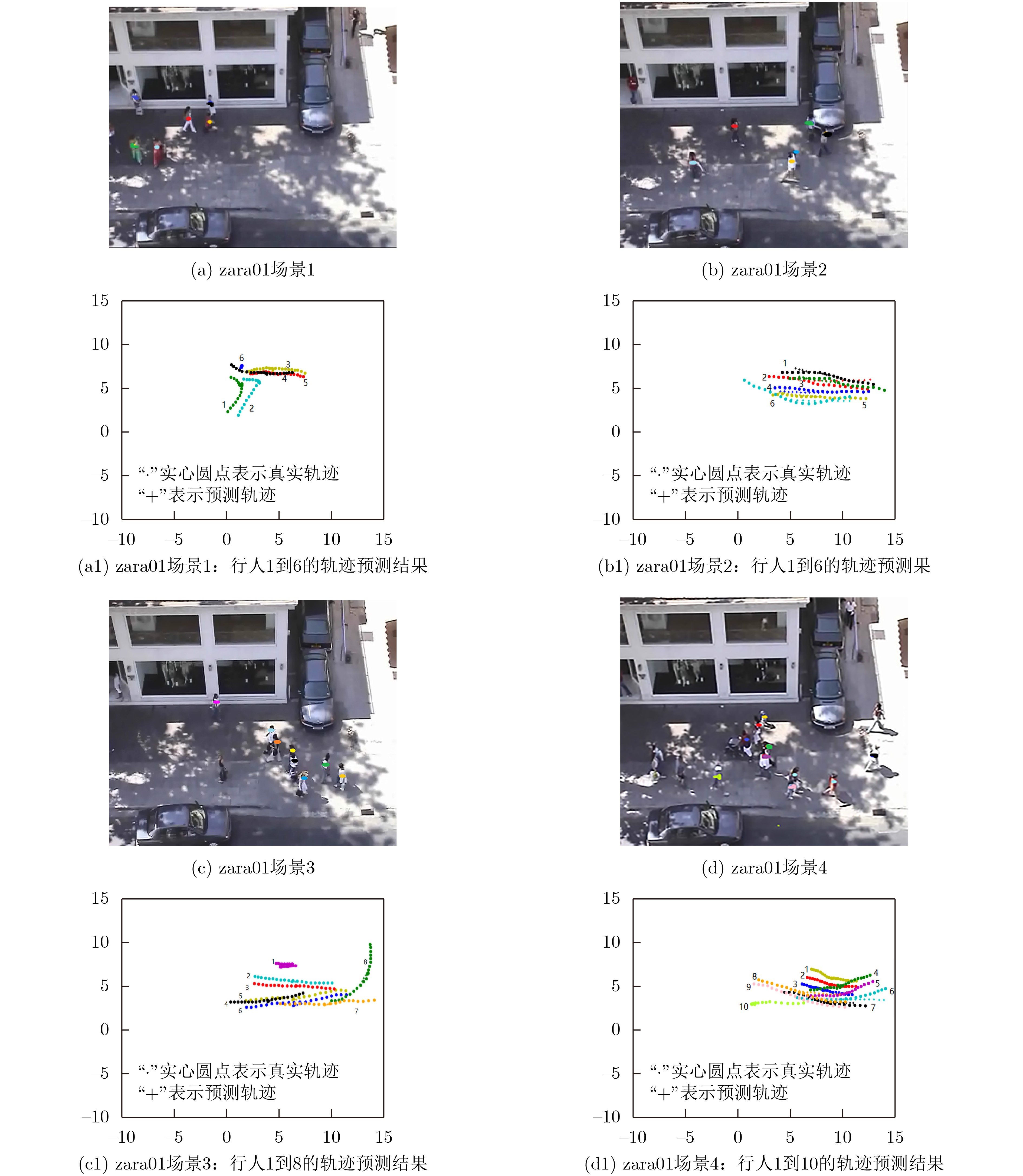
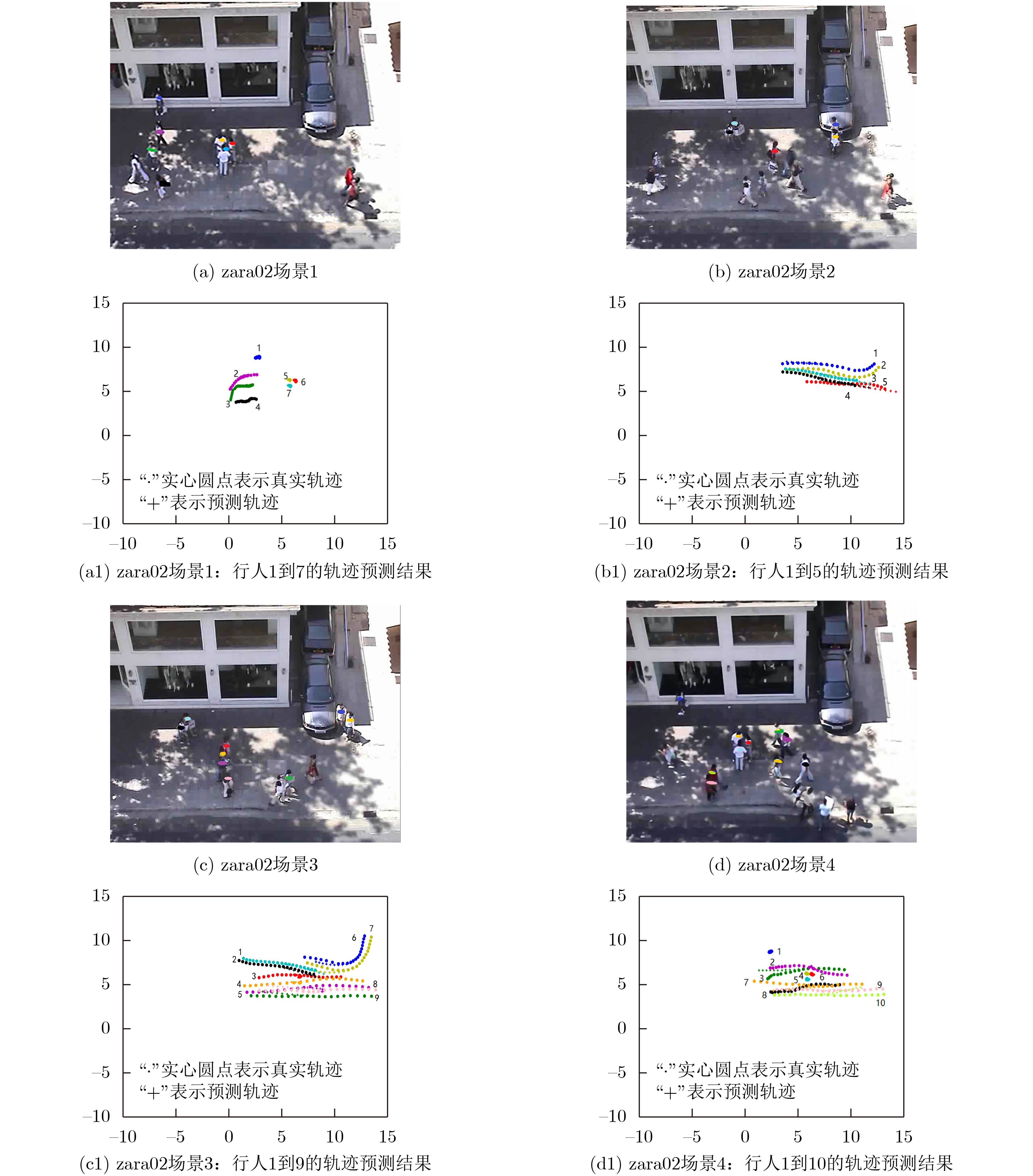
摘要: 行人轨迹预测应用十分广泛,比如自动驾驶、机器人导航等。在轨迹预测中,一些不确定信息给轨迹预测任务带来了挑战,比如判别器中对轨迹信息判别的不确定,复杂的交互信息。在不确定信息处理科学领域,信息分形能有效处理不确定信息的不确定性和复杂性。受此启发,为了充分处理判别器中轨迹信息判别的不确定性,提升预测精度,该文提出了基于信息分形的轨迹预测方法。首先,场景信息和历史轨迹信息被特征提取模块提取。然后,通过注意力模块获取到场景-行人之间的交互信息与行人-行人之间的交互信息。最后基于生成对抗网络和信息分形生成合理的轨迹。在两个公共数据集ETH/UCY上实验表明,该方法能有效处理轨迹信息的不确定性,提高轨迹预测的精度。比如突然转弯、从后方超越前人、避让等行为的轨迹都能有效预测。在平均位移误差(ADE)和终点位移误差(FDE)上相比基准模型误差平均降低了11.11%和23.48%。Abstract: Pedestrian trajectory prediction has been widely used in several fields, such as autonomous driving and robot navigation. In trajectory prediction, some uncertain information, such as the uncertainty of trajectory information discrimination in the discriminator and complex interactive information, bring challenges to the trajectory prediction task. In the field of uncertain information processing, information fractals can effectively deal with the uncertainty and complexity of uncertain information. Inspired by this, a trajectory prediction method based on the information fractal is proposed to fully deal with the uncertainty of trajectory information discrimination in the discriminator and improve the prediction accuracy. First, the scene and historical trajectory information are extracted by the feature extraction module. Subsequently, the scene-pedestrian interaction and pedestrian-pedestrian interaction information are obtained through the attention module. Finally, reasonable trajectories are generated using generative adversarial networks and information fractals. Experiments on the two public datasets ETH and UCY reveal that the proposed method can effectively deal with the uncertainty of trajectory information and improve the accuracy of trajectory prediction. For example, the trajectories of sudden turns, overtaking, avoidance, and other behaviors can be effectively predicted. Moreover, the Average Displacement Error (ADE) and Final Displacement Error (FDE) are reduced by an average of 11.11% and 23.48%, respectively compared with the benchmark model error.
-
表 1 轨迹预测的平均位移误差ADE(m)
基准模型\数据集 ETH主楼
eth酒店入口hotel 校园路口univ 购物街zara01 购物街zara02 平均误差AVG BR-GAN 0.73 0.55 0.53 0.35 0.35 0.50 SRAI-LSTM 0.59 0.29 0.55 0.37 0.43 0.45 VAEpsp 0.75 0.60 0.53 0.30 0.34 0.50 SCAN 0.79 0.37 0.58 0.37 0.31 0.48 S-GAN 0.81 0.72 0.60 0.34 0.42 0.58 Sophie 0.70 0.76 0.54 0.30 0.38 0.54 本方法 0.76 0.48 0.45 0.35 0.34 0.48  下载: 导出CSV
下载: 导出CSV
表 2 轨迹预测的终点位移误差FDE(m)
基准模型\数据集 ETH主楼eth 酒店入口hotel 校园路口univ 购物街zara01 购物街zara02 平均误差AVG BR-GAN 1.37 1.13 1.07 0.71 0.72 1.00 SRAI-LSTM 1.16 0.56 1.19 0.82 0.93 0.93 VAEpsp 1.62 1.28 1.35 0.79 0.91 1.19 SCAN 1.49 0.74 1.23 0.78 0.66 0.98 S-GAN 1.52 1.61 1.26 0.69 0.84 1.18 Sophie 1.43 1.67 1.24 0.63 0.78 1.15 本方法 1.26 0.87 0.86 0.71 0.69 0.88
下载: 导出CSV
表 3 消融模型及完整模型轨迹预测的平均位移误差ADE(m)/终点位移误差FDE(m)
基准模型\数据集 ETH主楼
eth酒店入口hotel 校园路口univ 购物街zara01 购物街zara02 平均误差AVG 消融模型 0.75/1.40 0.78/1.47 0.66/1.27 0.37/0.76 0.35/0.74 0.58/1.13 完整模型 0.76/1.26 0.48/0.87 0.45/0.86 0.35/0.71 0.34/0.69 0.48/0.88
下载: 导出CSV
表 4 模型参数表
模型\性能 预测耗时(s) 训练耗时(s) 参数总数(MB) Sophie 242.924 108193.49 137.43 本方法 136.948 68595.78 132.30
下载: 导出CSV
-
[1] PANG Shumin, CAO Jinxin, JIAN Meiying, et al. BR-GAN: A pedestrian trajectory prediction model combined with behavior recognition[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24609–24620. doi: 10.1109/TITS.2022.3193442. [2] 孔玮, 刘云, 李辉, 等. 基于深度学习的行人轨迹预测方法综述[J]. 控制与决策, 2021, 36(12): 2841–2850. doi: 10.13195/j.kzyjc.2020.1841.KONG Wei, LIU Yun, LI Hui, et al. Survey of pedestrian trajectory prediction methods based on deep learning[J]. Control and Decision, 2021, 36(12): 2841–2850. doi: 10.13195/j.kzyjc.2020.1841. [3] WANG Meiming and REN Jing. Neither too much nor too little: Leveraging moderate data in pedestrian trajectory prediction[C]. Proceedings of 2020 International Conference on Artificial Intelligence and Computer Engineering, Beijing, China, 2020: 444–448. doi: 10.1109/ICAICE51518.2020.00093. [4] CHEN Kai, SONG Xiao, and REN Xiaoxiang. Pedestrian trajectory prediction in heterogeneous traffic using pose keypoints-based convolutional encoder-decoder network[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2021, 31(5): 1764–1775. doi: 10.1109/TCSVT.2020.3013254. [5] CAI Yingfeng, DAI Lei, WANG Hai, et al. Pedestrian motion trajectory prediction in intelligent driving from far shot first-person perspective video[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5298–5313. doi: 10.1109/TITS.2021.3052908. [6] ZHU Q. Hidden Markov model for dynamic obstacle avoidance of mobile robot navigation[J]. IEEE Transactions on Robotics and Automation, 1991, 7(3): 390–397. doi: 10.1109/70.88149. [7] HELBING D and MOLNAR P. Social force model for pedestrian dynamics[J]. Physical Review E, 1995, 51(5): 4282–4286. doi: 10.1103/PhysRevE.51.4282. [8] WANG Chuhua, WANG Chuhua, XU Mingze, et al. Stepwise goal-driven networks for trajectory prediction[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2716–2723. doi: 10.1109/LRA.2022.3145090. [9] SADEGHIAN A, KOSARAJU V, SADEGHIAN A, et al. SoPhie: An attentive GAN for predicting paths compliant to social and physical constraints[C]. Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 1349–1358. doi: 10.1109/CVPR.2019.00144. [10] GUPTA A, JOHNSON J, FEI-FEI L, et al. Social GAN: Socially acceptable trajectories with generative adversarial networks[C]. Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 2255–2264. doi: 10.1109/CVPR.2018.00240. [11] 李琳辉, 周彬, 连静, 等. 基于社会注意力机制的行人轨迹预测方法研究[J]. 通信学报, 2020, 41(6): 175–183. doi: 10.11959/j.issn.1000-436x.2020100.LI Linhui, ZHOU Bin, and LIAN Jing, et al. Research on pedestrian trajectory prediction method based on social attention mechanism[J]. Journal on Communications, 2020, 41(6): 175–183. doi: 10.11959/j.issn.1000-436x.2020100. [12] LIAN Jing, REN Weiwei, LI Linhui, et al. PTP-STGCN: Pedestrian trajectory prediction based on a spatio-temporal graph convolutional neural network[J]. Applied Intelligence, 2023, 53(3): 2862–2878. doi: 10.1007/s10489-022-03524-1. [13] SYED A and MORRIS B T. SSeg-LSTM: Semantic scene segmentation for trajectory prediction[C]. Proceedings of 2019 IEEE Intelligent Vehicles Symposium, Paris, France, 2019: 2504–2509. doi: 10.1109/IVS.2019.8813801. [14] HU Hongyu, WANG Qi, DU Laigang, et al. Vehicle trajectory prediction considering aleatoric uncertainty[J]. Knowledge-Based Systems, 2022, 255: 109617. doi: 10.1016/j.knosys.2022.109617. [15] XIAO Fuyuan and PEDRYCZ W. Negation of the quantum mass function for multisource quantum information fusion with its application to pattern classification[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(2): 2054–2070. doi: 10.1109/TPAMI.2022.3167045. [16] XIAO Fuyuan, CAO Zehong, and LIN C T. A complex weighted discounting multisource information fusion with its application in pattern classification[J]. IEEE Transactions on Knowledge and Data Engineering, 2023, 35(8): 7609–7623. doi: 10.1109/TKDE.2022.3206871. [17] XIAO Fuyuan. CEQD: A complex mass function to predict interference effects[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 7402–7414. doi: 10.1109/TCYB.2020.3040770. [18] DENG Yong. Information volume of mass function[J]. International Journal of Computers Communications & Control, 2020, 15(6): 3983. [19] DEMPSTER A P. Upper and lower probabilities induced by a multivalued mapping[J]. The Annals of Mathematical Statistics, 1967, 38(2): 325–339. doi: 10.1214/aoms/1177698950. [20] DENG Yong. Random permutation set[J]. International Journal of Computers Communications & Control, 2022, 17(1): 4542. doi: 10.15837/ijccc.2022.1.4542. [21] QIANG Chenhui, DENG Yong, and CHEONG K H. Information fractal dimension of mass function[J]. Fractals, 2022, 30(6): 2250110. doi: 10.1142/S0218348X22501109. [22] CASTILLO O and MELIN P. Forecasting of COVID-19 time series for countries in the world based on a hybrid approach combining the fractal dimension and fuzzy logic[J]. Chaos, Solitons & Fractals, 2020, 140: 110242. doi: 10.1016/j.chaos.2020.110242. [23] CASTILLO O and MELIN P. A new approach for plant monitoring using type-2 fuzzy logic and fractal theory[J]. International Journal of General Systems, 2004, 33(2/3): 305–319. doi: 10.1080/03081070310001633617. [24] 刘云, 薛盼盼, 李辉, 等. 基于深度学习的关节点行为识别综述[J]. 电子与信息学报, 2021, 43(6): 1789–1802. doi: 10.11999/JEIT 200267.LIU Yun, XUE Panpan, LI Hui, et al. A review of action recognition using joints based on deep learning[J]. Journal of Electronics & Information Technology, 2021, 43(6): 1789–1802. doi: 10.11999/JEIT200267. [25] DENG Yong. Deng entropy[J]. Chaos, Solitons & Fractals, 2016, 91: 549–553. doi: 10.1016/j.chaos.2016.07.014. [26] PENG Yusheng, ZHANG Gaofeng, SHI Jun, et al. SRAI-LSTM: A social relation attention-based interaction-aware LSTM for human trajectory prediction[J]. Neurocomputing, 2022, 490: 258–268. doi: 10.1016/j.neucom.2021.11.089. [27] Syed A and Morris B T. Semantic scene upgrades for trajectory prediction[J]. Machine Vision and Applications, 2023, 34(2): 23. doi: 10.1007/s00138-022-01357-z. [28] SEKHON J and FLEMING C. SCAN: A spatial context attentive network for joint multi-agent intent prediction[C]. Proceedings of the 35th AAAI Conference on Artificial Intelligence, Palo Alto, USA, 2021: 6119–6127. doi: 10.1609/aaai.v35i7.16762. -

 下载:
下载:


图(6) / 表(4)
计量
- 文章访问数: 1066
- HTML全文浏览量: 912
- PDF下载量: 97
- 被引次数: 0
