

Precoding and Trajectory Design of Unmanned Aerial Vehicle Based on Joint Communication and Sensing
-
摘要: 无人机(UAVs)具有机动性强,低成本及易部署等特性,通过搭载通信及感知设备,支持通信与感知技术的高效资源共享,无人机可作为融合通信与传感技术的高性能空中平台。该文针对多输入多输出(MIMO)无人机使能的联合通信、感知场景,综合考虑无人机飞行能量、多天线传输及用户业务需求等限制条件,建模无人机通信、感知预编码及飞行轨迹联合优化问题为多目标优化问题,以实现通信用户最低速率最大化及目标最小发现概率最大化。由于通信用户最低速率最大化问题为非凸优化问题,难以直接求解,将原优化问题分解为通信预编码设计子问题及无人机轨迹设计子问题,并采用交替迭代法依次求解两个子问题直至算法收敛,其中,对于通信预编码设计子问题,提出一种基于迫零(ZF)算法的求解策略;对于无人机轨迹设计子问题,提出一种基于连续凸逼近(SCA)算法的求解策略。基于所得到的无人机最优轨迹,将无人机感知位置选择问题建模为加权距离和最小化问题,进而应用泛搜索算法优化确定目标感知位置,并设计基于ZF算法的通信感知预编码联合优化策略,以实现通信感知性能的联合优化。最后通过仿真验证了该文所提算法的有效性。Abstract: Benefited from the characteristics of high mobility, low cost and convenient deployment, by deploying communication and sensing equipment and supporting efficient resource sharing of communication and sensing technologies, Unmanned Aerial Vehicles (UAVs) are expected to act as high-performance aerial platforms which integrate communication and sensing technologies. In this paper, Multiple-Input-Multiple-Output (MIMO) UAV-enabled joint communication and sensing scenario is examined, the constraints of the flight energy of the UAV, multi-antenna transmission and user service requirement are jointly considered, the problem of UAV communication, sensing precoding and flight trajectory is formulated as a multi-objective optimization problem which jointly maximizes the minimum data rate of communication users and the minimum discovery probability of targets. Since the minimum rate maximization problem of communication users is a non-convex optimization problem, which is difficult to solve directly, the original optimization problem is decomposed into communication precoding design subproblem and UAV trajectory design subproblem. The two subproblems are solved successively by applying alternate iteration method until the algorithm reaches convergence. Specifically, a Zero-Forcing (ZF) algorithm is put forward for solving the communication precoding design subproblem. A Successive Convex Approximation (SCA) algorithm is applied to determine the optimal trajectory of the UAV. Based on the optimal trajectory of UAV, the sensing location selection problem is modeled as a weighted distance minimization problem, and then the extensive search algorithm is applied to obtain the optimal locations. Finally, a ZF algorithm-based joint communication and sensing precoding is presented. The effectiveness of the proposed algorithm is verified by simulations.
-
表 1 仿真参数设置
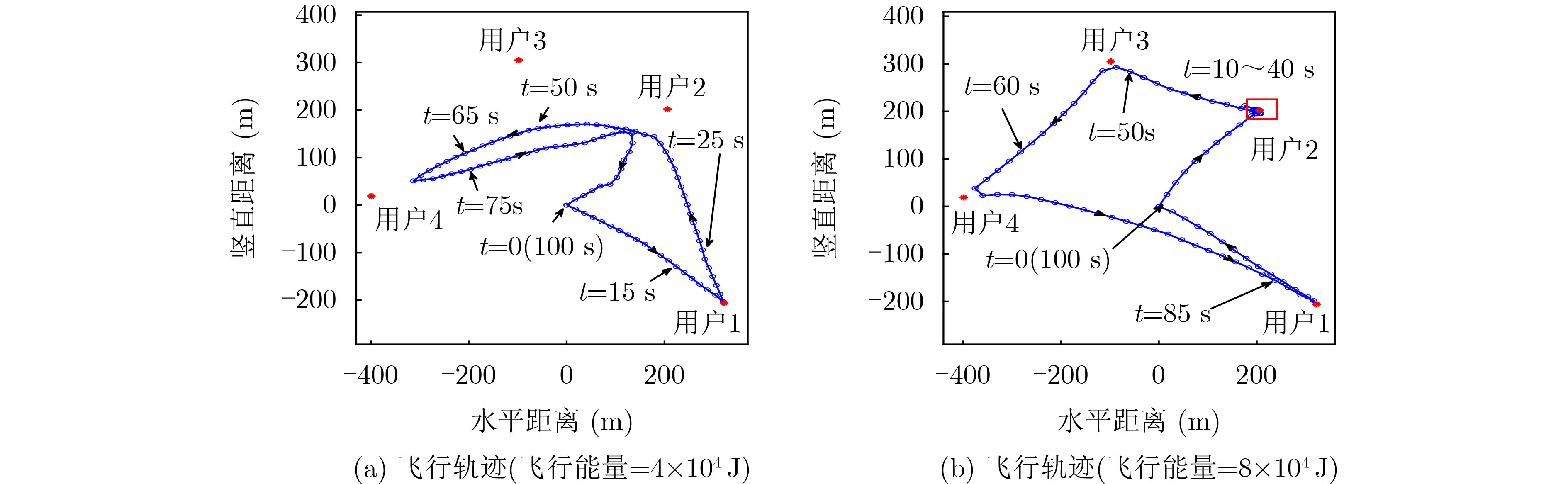
仿真参数 数值 LOS特性系数(ρ0) 10–2 飞行高度(L) 50 m 噪声标准差(σ2) 10–10 W 无人机速度上限(Vmax) 30 m/s 无人机飞行能量系数(k1,k2) 0.066 1, 15.97 飞行通信能量上限(Ec) 100 J 无人机飞行能量上限 4×104 J, 8×104 J 无人机通感联合能量上限(Es) 100 J 每时隙通信发射功率上限($ p_{\max }^{\text{c}} $) 1.5 W 每时隙感知发射功率上限($ p_{\max }^{\text{s}} $) 30 W 雷达最小接收灵敏度(Si min) –90 dBm  下载: 导出CSV
下载: 导出CSV
-
[1] ZHENG Le, LOPS M, ELDAR Y C, et al. Radar and communication coexistence: An overview: A review of recent methods[J]. IEEE Signal Processing Magazine, 2019, 36(5): 85–99. doi: 10.1109/MSP.2019.2907329. [2] ZHANG J A, HUANG Xiaojing, GUO Y J, et al. Multibeam for joint communication and radar sensing using steerable analog antenna arrays[J]. IEEE Transactions on Vehicular Technology, 2019, 68(1): 671–685. doi: 10.1109/TVT.2018.2883796. [3] YUAN Xin, FENG Zhiyong, ZHANG J A, et al. Spatio-temporal power optimization for MIMO joint communication and radio sensing systems with training overhead[J]. IEEE Transactions on Vehicular Technology, 2021, 70(1): 514–528. doi: 10.1109/TVT.2020.3046438. [4] 江源. 面向MU-MIMO的符号级预编码和接收波束赋形[D]. [硕士论文], 南京邮电大学, 2022. doi: 10.27251/d.cnki.gnjdc.2022.001094.JIANG Yuan. Symbol level precoding and receive beamforming for MU-MIMIO[D]. [Master dissertation], Nanjing University of Posts and Telecommunications, 2022. doi: 10.27251/d.cnki.gnjdc.2022.001094. [5] LIU Xiang, HUANG Tianyao, SHLEZINGER N, et al. Joint transmit beamforming for multiuser MIMO communications and MIMO radar[J]. IEEE Transactions on Signal Processing, 2020, 68: 3929–3944. doi: 10.1109/TSP.2020.3004739. [6] ZHOU Yifan, ZHOU Huilin, ZHOU Fuhui, et al. Resource allocation for a wireless powered integrated radar and communication system[J]. IEEE Wireless Communications Letters, 2019, 8(1): 253–256. doi: 10.1109/LWC.2018.2868819. [7] SAVKIN A V and HUANG Hailong. Deployment of unmanned aerial vehicle base stations for optimal quality of coverage[J]. IEEE Wireless Communications Letters, 2019, 8(1): 321–324. doi: 10.1109/LWC.2018.2872547. [8] SUN Jingcong and MASOUROS C. Deployment strategies of multiple aerial BSs for user coverage and power efficiency maximization[J]. IEEE Transactions on Communications, 2019, 67(4): 2981–2994. doi: 10.1109/TCOMM.2018.2889460. [9] SHABANIGHAZIKELAYEH M and KOYUNCU E. Outage-optimized deployment of UAVs[C]. The 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications, Istanbul, Turkey, 2019: 1–6. doi: 10.1109/PIMRC.2019.8904305. [10] WU Qingqing, ZENG Yong, and ZHANG Rui. Joint trajectory and communication design for multi-UAV enabled wireless networks[J]. IEEE Transactions on Wireless Communications, 2018, 17(3): 2109–2121. doi: 10.1109/TWC.2017.2789293. [11] WU Jun, LI Pei, BAO Jianrong, et al. Quick multiband spectrum sensing for delay-constraint cognitive UAV networks[J]. IEEE Sensors Journal, 2022, 22(19): 19088–19100. doi: 10.1109/JSEN.2022.3201006. [12] MENG Kaitao, LI Deshi, HE Xiaofan, et al. Space pruning based time minimization in delay constrained multi-task UAV-based sensing[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2836–2849. doi: 10.1109/TVT.2021.3061243. [13] MENG Kaitao, WU Qingqing, MA Shaodan, et al. Throughput maximization for UAV-enabled integrated periodic sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(1): 671–687. doi: 10.1109/TWC.2022.3197623. [14] MENG Kaitao, WU Qingqing, MA Shaodan, et al. UAV trajectory and beamforming optimization for integrated periodic sensing and communication[J]. IEEE Wireless Communications Letters, 2022, 11(6): 1211–1215. doi: 10.1109/LWC.2022.3161338. [15] 丁鹭飞, 耿富录. 雷达原理[M]. 3版. 西安: 西安电子科技大学出版社, 2002: 130–138.DING Lufei and GENG Fulu. Principle of Radar[M]. 3rd ed. Xi'an: Xidian University Press, 2002: 130–138. [16] JI Jiequ, ZHU Kun, YI Changyan, et al. Energy consumption minimization in UAV-assisted mobile-edge computing systems: Joint resource allocation and trajectory design[J]. IEEE Internet of Things Journal, 2021, 8(10): 8570–8584. doi: 10.1109/JIOT.2020.3046788. -


 下载:
下载:




图(6) / 表(1)
计量
- 文章访问数: 1355
- HTML全文浏览量: 674
- PDF下载量: 133
- 被引次数: 0
