

Improved Adaptive IMM-UKF Algorithm Based on Monotonous Transformation of Model Probability
-
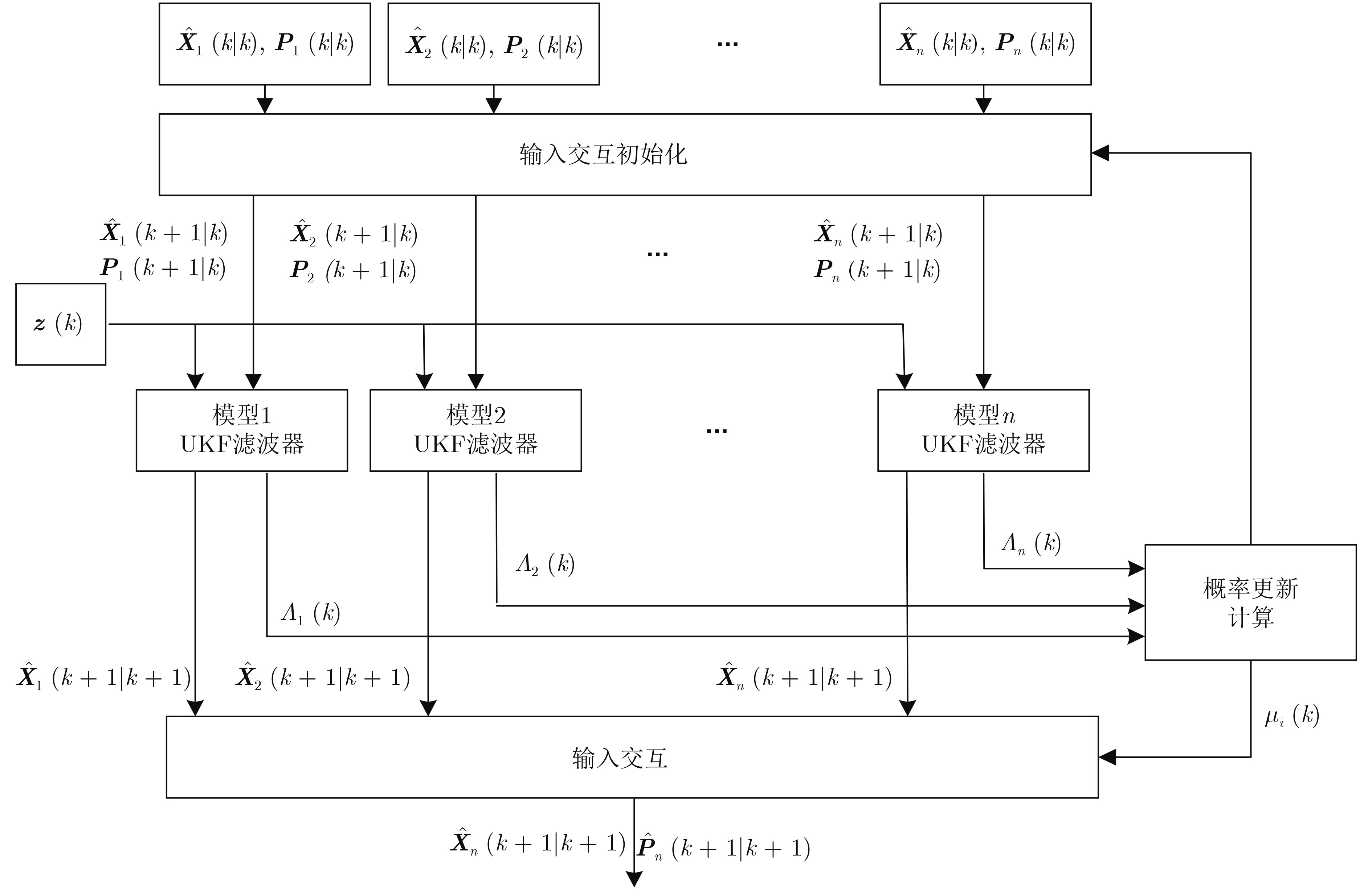
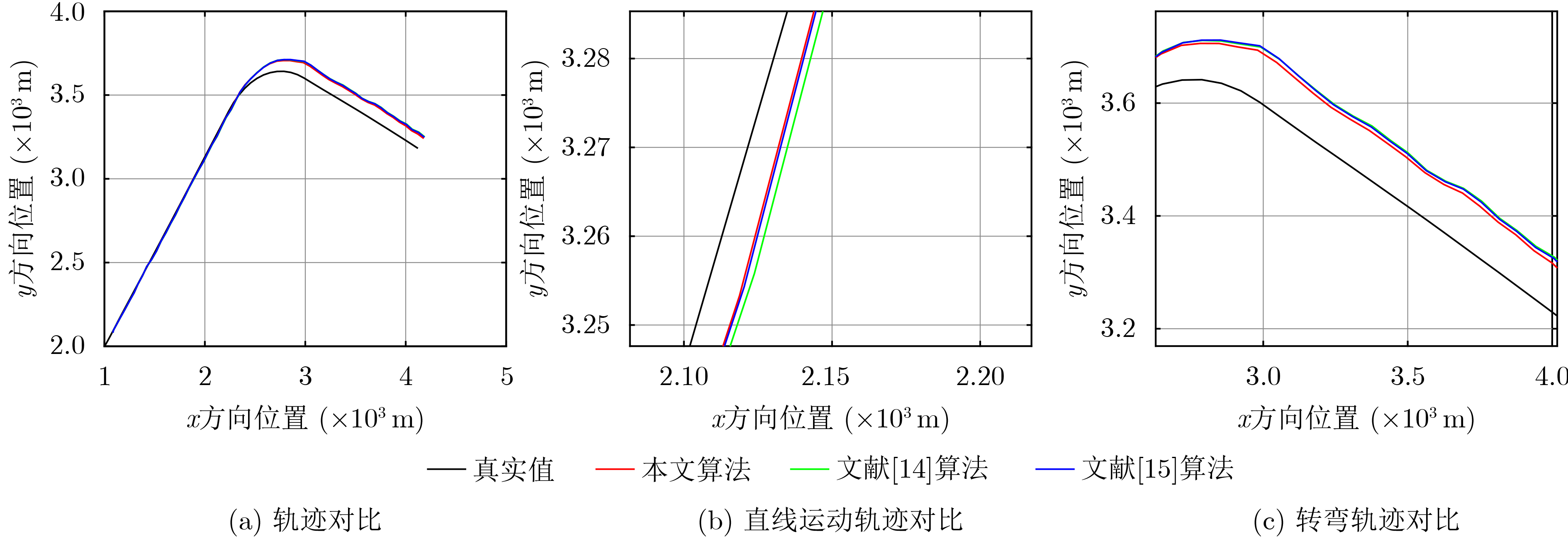
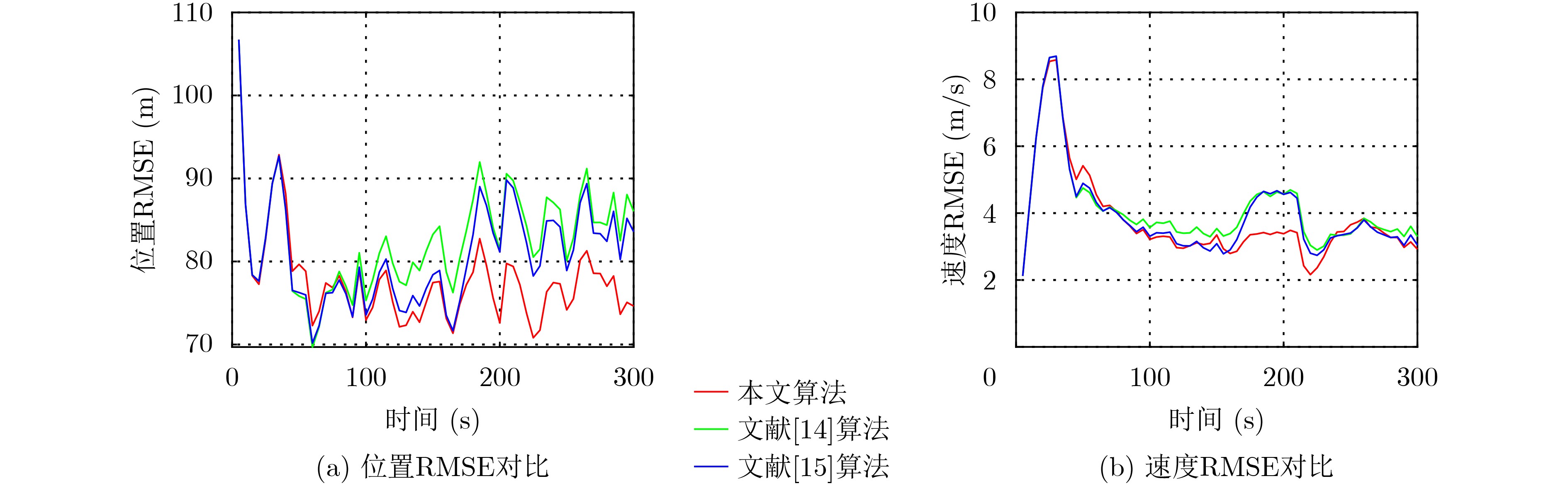
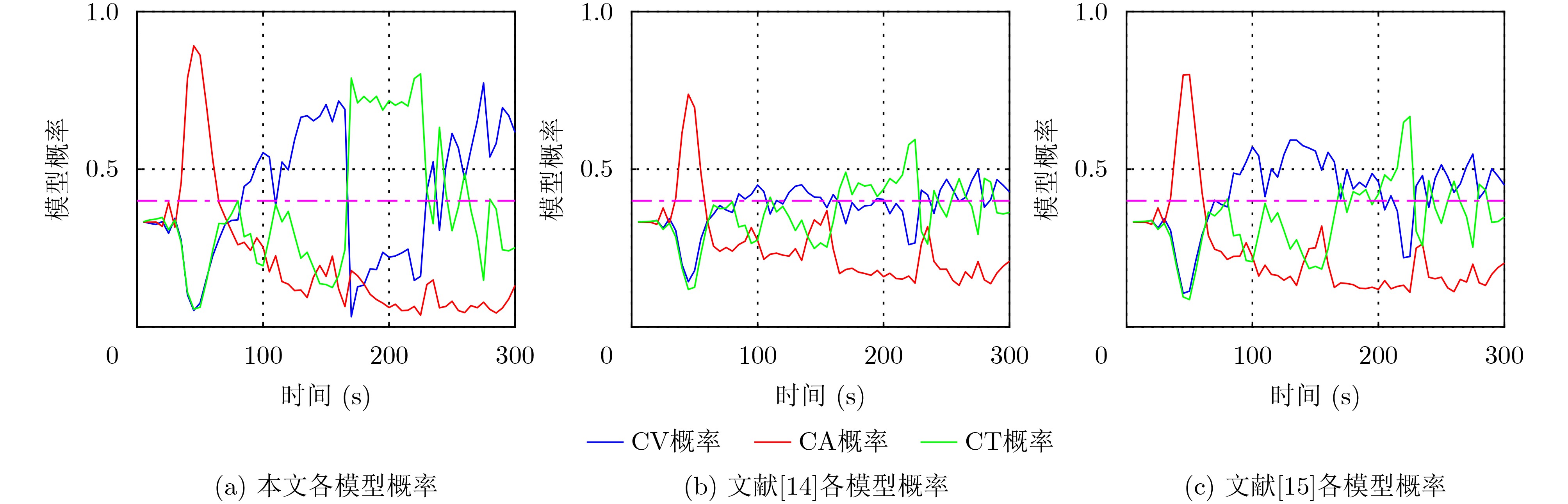
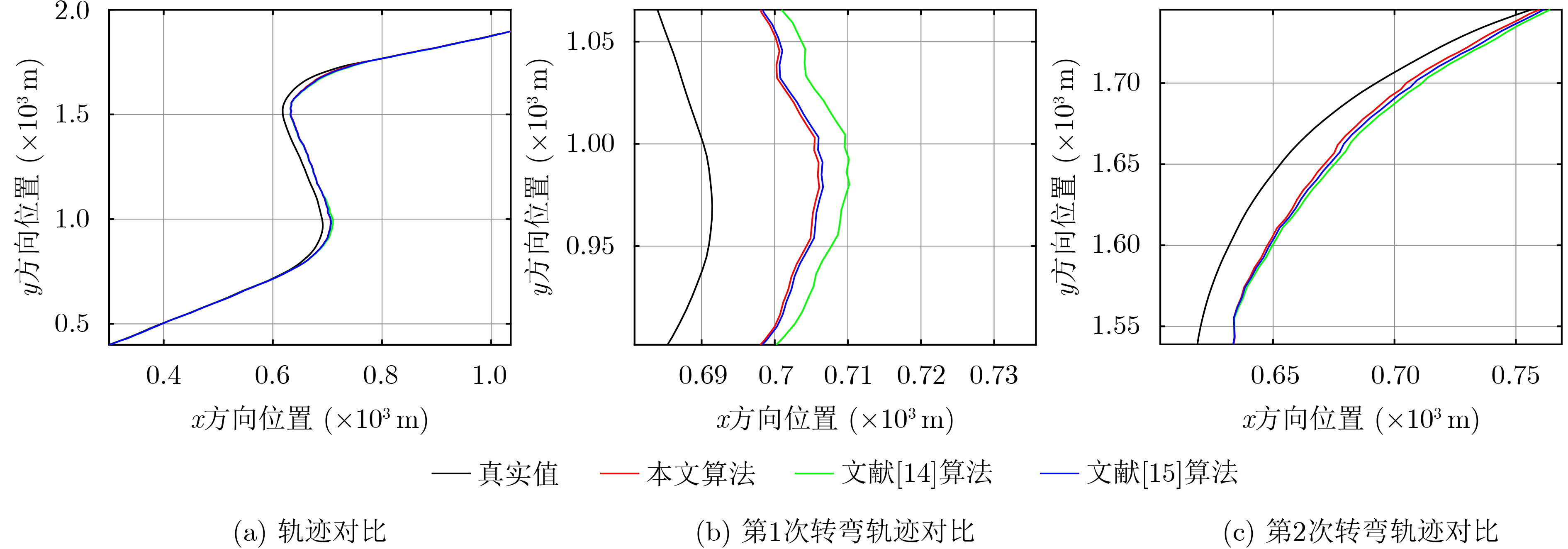
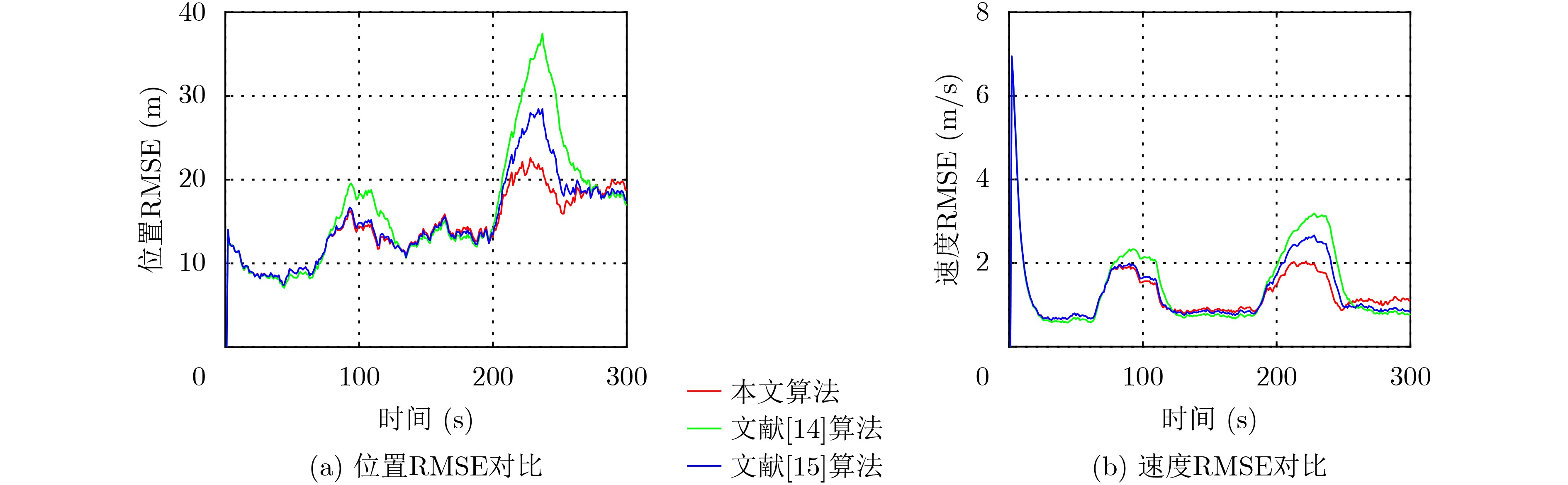
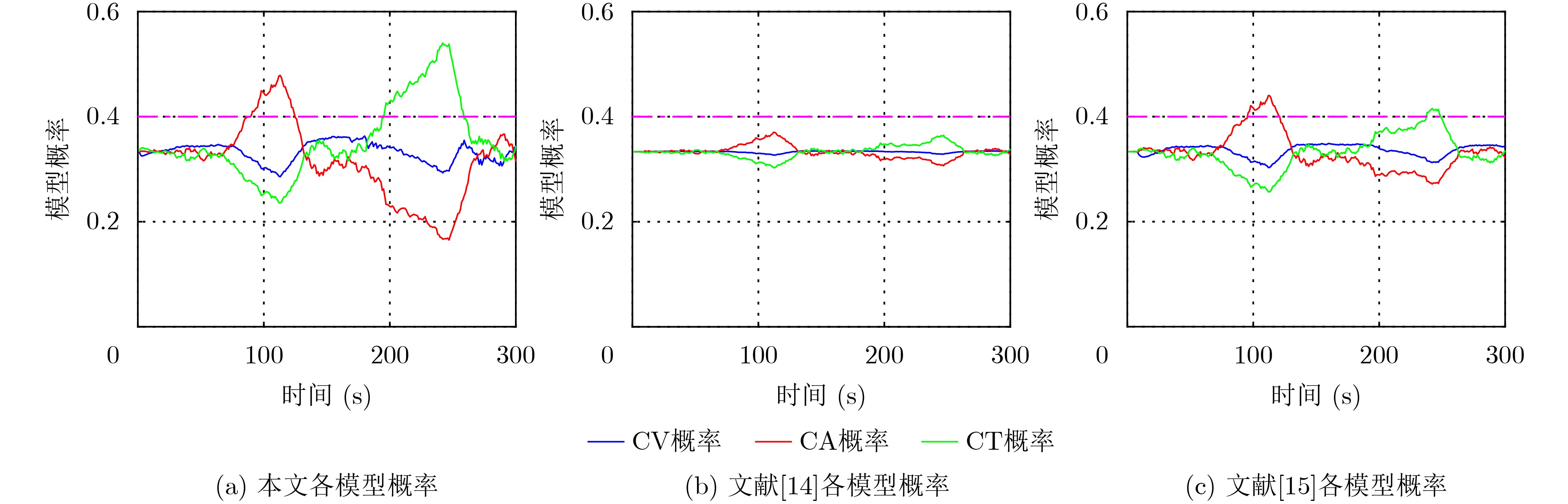
摘要: 针对现有交互式多模型(IMM)算法模型间切换迟滞和转换速率慢的缺点,提出一种基于模型概率单调性变化的自适应交互式多模型无迹卡尔曼滤波改进算法(mIMM-UKF)。该算法利用后验信息模型概率的单调性,对马尔可夫转移概率矩阵及模型估计概率进行二次修正,加快了匹配模型的切换速度及转换速率。仿真结果表明,与现有算法相比,该算法通过快速切换匹配模型,有效提高了水下目标跟踪精度。Abstract: Considering the hysteresis of model switching and the slow conversion rate of existing adaptive interacting multiple models, an improved algorithm of adaptive interacting multiple models with an unscented Kalman filter based on monotone transformation of model probability (mIMM-UKF) is proposed. In this algorithm, the monotonicity of the model probability in the posterior information is used, and this algorithm makes a secondary modification to the Markov probability transition matrix and model estimation probability is introduced. Consequently, an accelerated switching speed and conversion rate of the matching model are obtained. The simulation results show that compared to existing algorithms, this algorithm significantly improves the accuracy of target tracking by enabling swift switching of matching models.
-
表 1 CA-CV-CT轨迹3种算法ARMSE对比
 下载: 导出CSV
下载: 导出CSV
-
[1] MAZOR E, AVERBUCH A, BAR-SHALOM Y, et al. Interacting multiple model methods in target tracking: A survey[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(1): 103–123. doi: 10.1109/7.640267 [2] LI Yi, CHEN Xinhua, and SUN Changyu. A tracking method based on particle filter for multistatic sonar system[C]. Proceedings of 2014 IEEE International Conference on Signal Processing, Communications and Computing, Guilin, China, 2014: 162–165. [3] FOO P H. Combining the interacting multiple model method with particle filters for manoeuvring target tracking with a multistatic radar system[J]. IET Radar, Sonar & Navigation, 2011, 5(7): 697–706. doi: 10.1049/iet-rsn.2010.0357 [4] 张文, 孙瑞胜. EKF与UKF的性能比较及应用[J]. 南京理工大学学报, 2015, 39(5): 614–618. doi: 10.14177/j.cnki.32-1397n.2015.39.05.017ZHANG Wen and SUN Ruisheng. Research on performance comparison of EKF and UKF and their application[J]. Journal of Nanjing University of Science and Technology, 2015, 39(5): 614–618. doi: 10.14177/j.cnki.32-1397n.2015.39.05.017 [5] 万莉, 刘焰春, 皮亦鸣. EKF、UKF、PF目标跟踪性能的比较[J]. 雷达科学与技术, 2007, 5(1): 13–16. doi: 10.3969/j.issn.1672-2337.2007.01.003WAN Li, LIU Yanchun, and PI Yiming. Comparing of target-tracking performances of EKF, UKF and PF[J]. Radar Science and Technology, 2007, 5(1): 13–16. doi: 10.3969/j.issn.1672-2337.2007.01.003 [6] JULIER S J and UHLMANN J. The scaled unscented transformation (Author’s Comments)[J]. IEEE Transactions on Automatic Control, 2002, 47: 1408–1409. doi: 10.1109/TAC.2002.800741 [7] 仇世刚, 汪圣利. 模型转移概率自适应的交互式多模型UKF算法[J]. 自动化技术与应用, 2008, 27(6): 61–66,56. doi: 10.3969/j.issn.1003-7241.2008.06.017QIU Shigang and WANG Shengli. An interacting multiple model UKF algorithm with adaptive Markov transition probabilities[J]. Techniques of Automation and Applications, 2008, 27(6): 61–66,56. doi: 10.3969/j.issn.1003-7241.2008.06.017 [8] 苗伟, 李昌玺, 吴聪. 基于修正转弯模型的交互多模型跟踪算法[J]. 现代防御技术, 2015, 43(3): 113–118. doi: 10.3969/j.issn.1009-086X.2015.03.021MIAO Wei, LI Changxi, and WU Cong. Interactive multiple model tracking algorithm based on the modified model of turning[J]. Modern Defense Technology, 2015, 43(3): 113–118. doi: 10.3969/j.issn.1009-086X.2015.03.021 [9] 马天力, 张扬, 高嵩, 等. 具有噪声信息与状态模型不确定系统的IMM自适应滤波[J]. 控制与决策, 2023.MA Tianli, ZHANG Yang, GAO Song, et al. Interactive multiple model adaptive filter for system with uncertain state model and noise information[J]. Control and Decision, 2023. [10] 李明, 柴洪洲, 靳凯迪, 等. 改进的强跟踪自适应UKF算法及其在大方位失准角对准中的应用[J]. 导航定位学报, 2022, 10(6): 165–172. doi: 10.3969/j.issn.2095-4999.2022.06.022LI Ming, CHAI Hongzhou, JIN Kaidi, et al. Improved strong tracking adaptive UKF algorithm and its application in large azimuth misalignment[J]. Journal of Navigation and Positioning, 2022, 10(6): 165–172. doi: 10.3969/j.issn.2095-4999.2022.06.022 [11] ZHU Hongfeng, XIONG Wei, and CUI Yaqi. An adaptive interactive multiple-model algorithm based on end-to-end learning[J]. Chinese Journal of Electronics, 2023, 32(4): 1–13. doi: 10.23919/cje.2021.00.442 [12] 李昊润, 卜凡康, 周剑雄. 修正的马尔科夫转移矩阵自适应IMM算法[J]. 火力与指挥控制, 2021, 46(9): 118–124,132. doi: 10.3969/j.issn.1002-0640.2021.09.021LI Haorun, BU Fankang, and ZHOU Jianxiong. Improved adaptive Markov matrix IMM algorithm[J]. Fire Control &Command Control, 2021, 46(9): 118–124,132. doi: 10.3969/j.issn.1002-0640.2021.09.021 [13] 封普文, 黄长强, 曹林平, 等. 马尔可夫矩阵修正IMM跟踪算法[J]. 系统工程与电子技术, 2013, 35(11): 2269–2274. doi: 10.3969/j.issn.1001-506X.2013.11.07FENG Puwen, HUANG Changqiang, CAO Linping, et al. Research on adaptive Markov matrix IMM tracking algorithm[J]. Systems Engineering and Electronics, 2013, 35(11): 2269–2274. doi: 10.3969/j.issn.1001-506X.2013.11.07 [14] 叶瑾, 许枫, 杨娟, 等. 一种改进的时变转移概率AIMM跟踪算法[J]. 应用声学, 2020, 39(2): 246–252. doi: 10.11684/j.issn.1000-310X.2020.02.011YE Jin, XU Feng, YANG Juan, et al. An improved AIMM tracking algorithm based on adaptive transition probability[J]. Journal of Applied Acoustics, 2020, 39(2): 246–252. doi: 10.11684/j.issn.1000-310X.2020.02.011 [15] 王平波, 刘杨. 基于改进自适应IMM-UKF算法的水下目标跟踪[J]. 电子与信息学报, 2022, 44(6): 1999–2005. doi: 10.11999/JEIT211128WANG Pingbo and LIU Yang. Underwater target tracking algorithm based on improved adaptive IMM-UKF[J]. Journal of Electronics &Information Technology, 2022, 44(6): 1999–2005. doi: 10.11999/JEIT211128 -

 下载:
下载:


图(7) / 表(2)
计量
- 文章访问数: 1253
- HTML全文浏览量: 608
- PDF下载量: 128
- 被引次数: 0
