

Unmanned Aerial Vehicle Detection and Recognition Method Based on Multi-dimensional Signal Feature
-
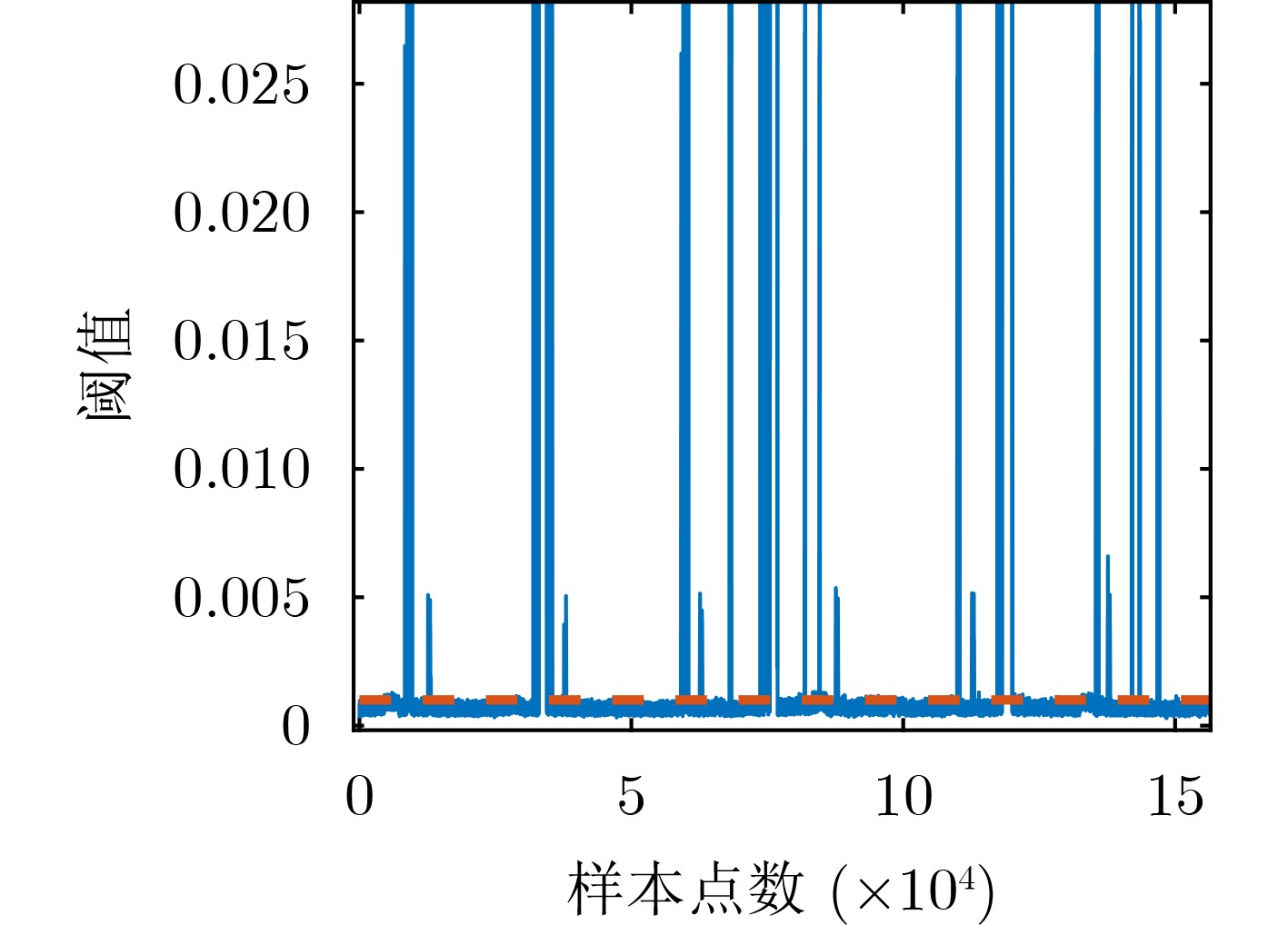
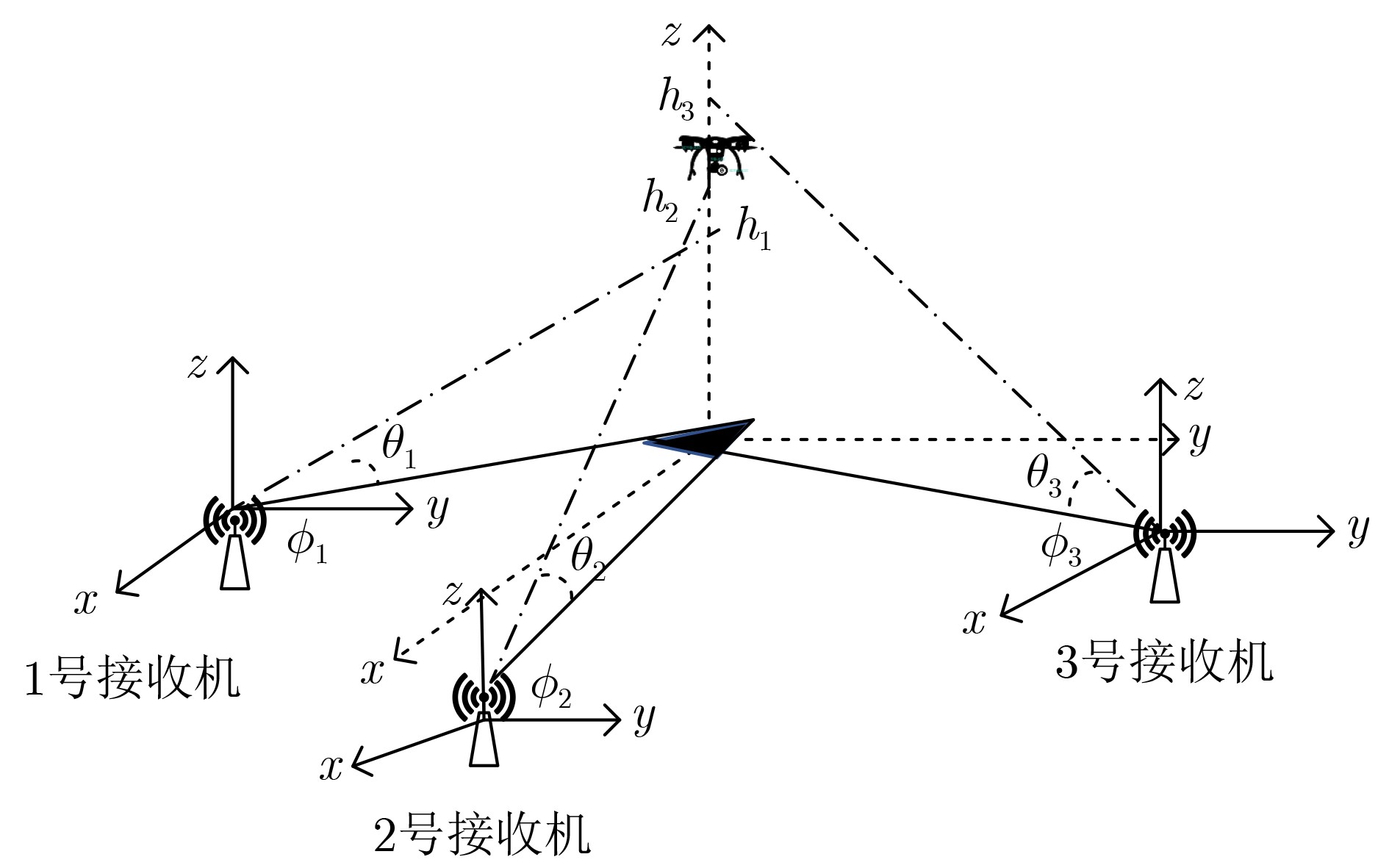
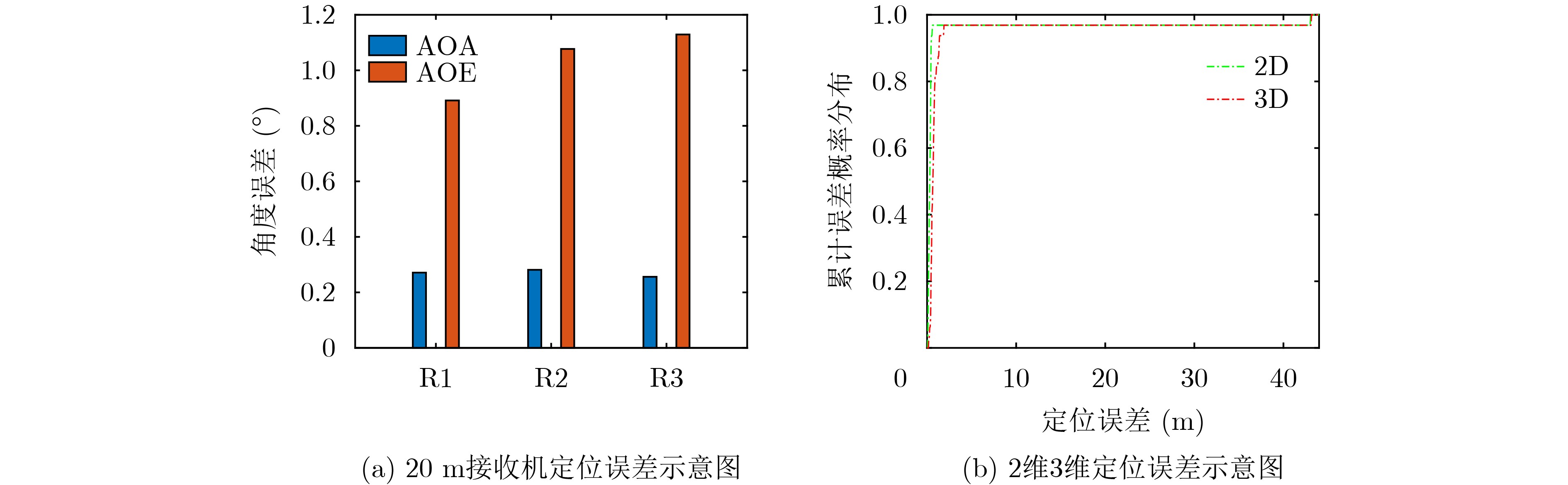
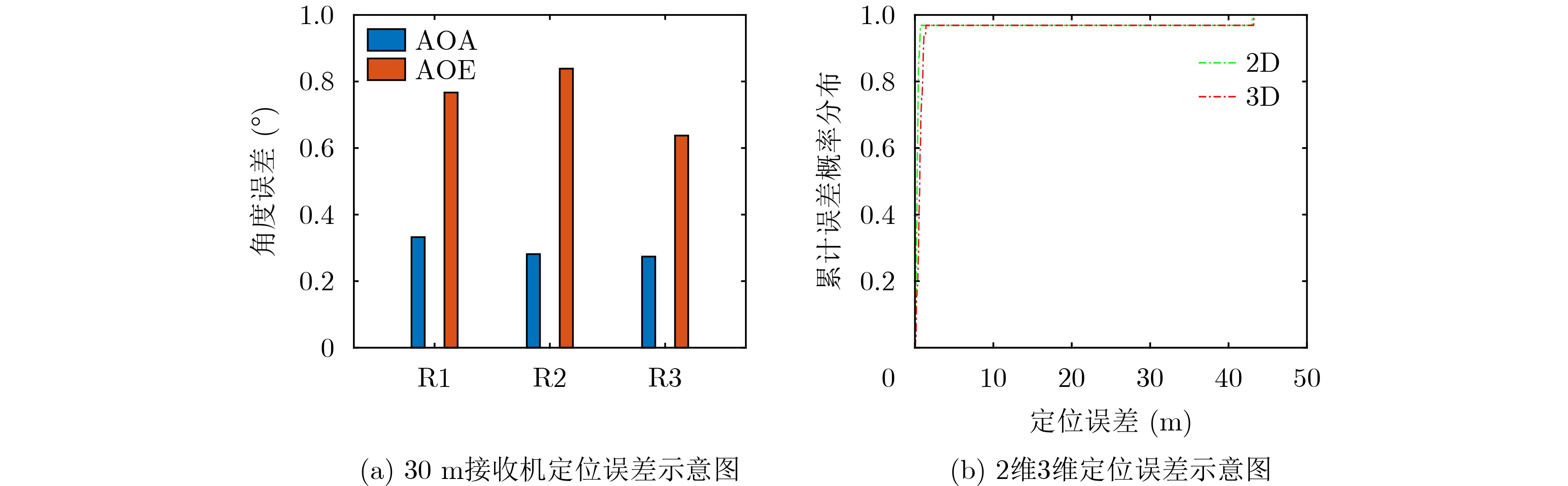
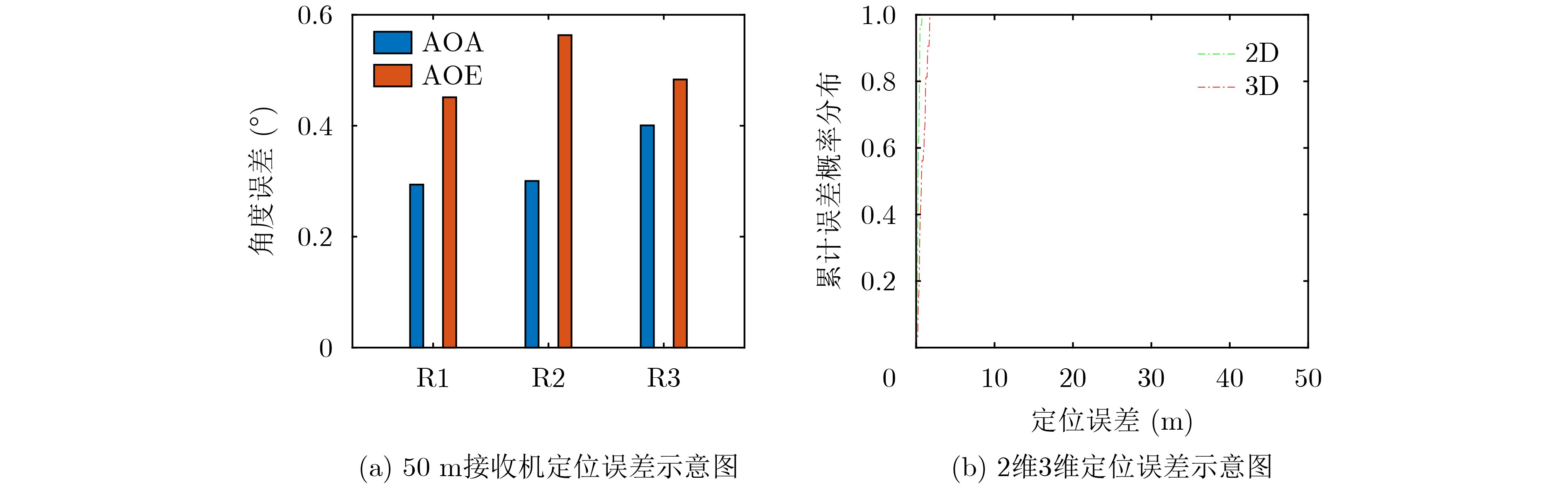
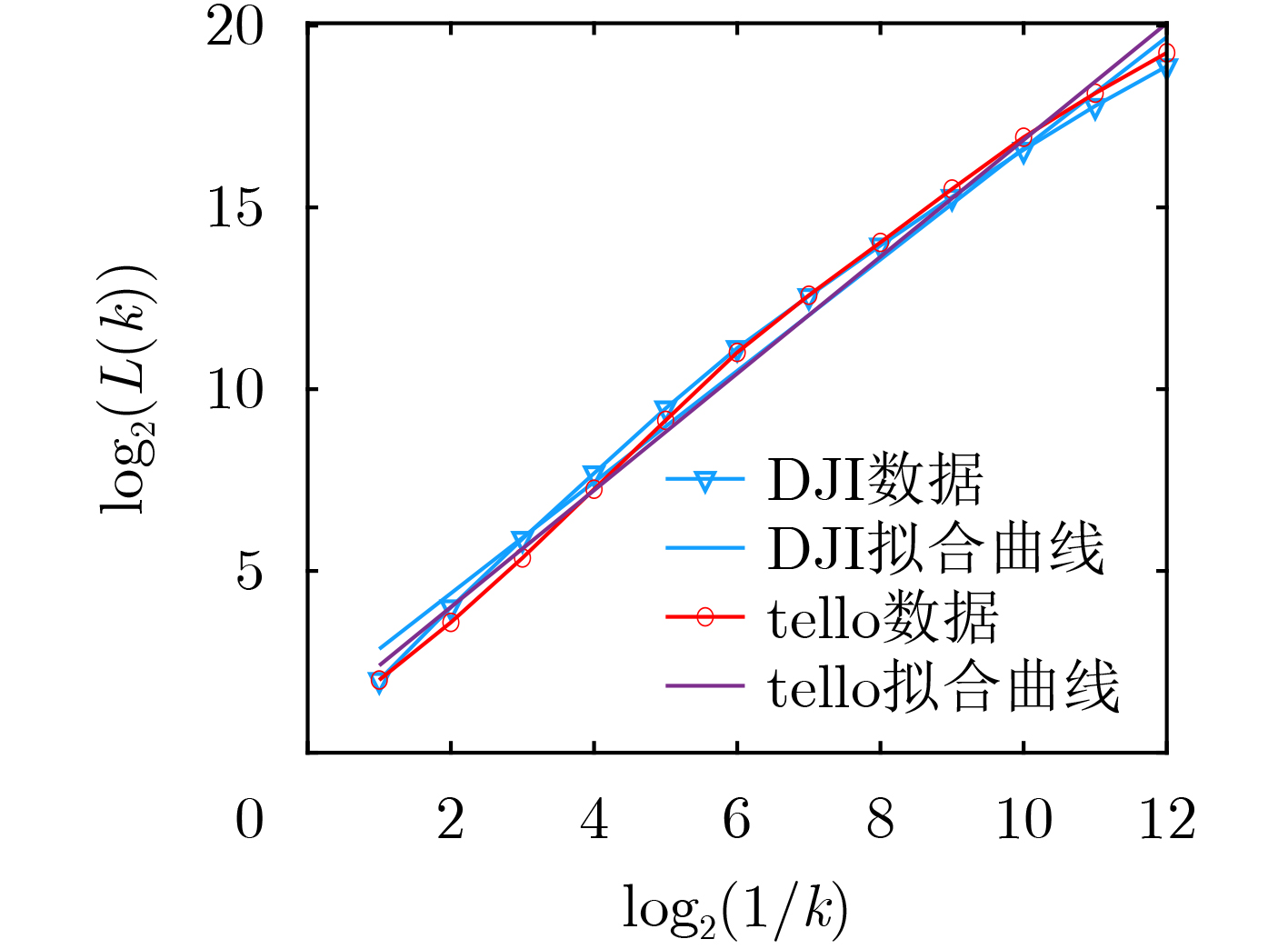
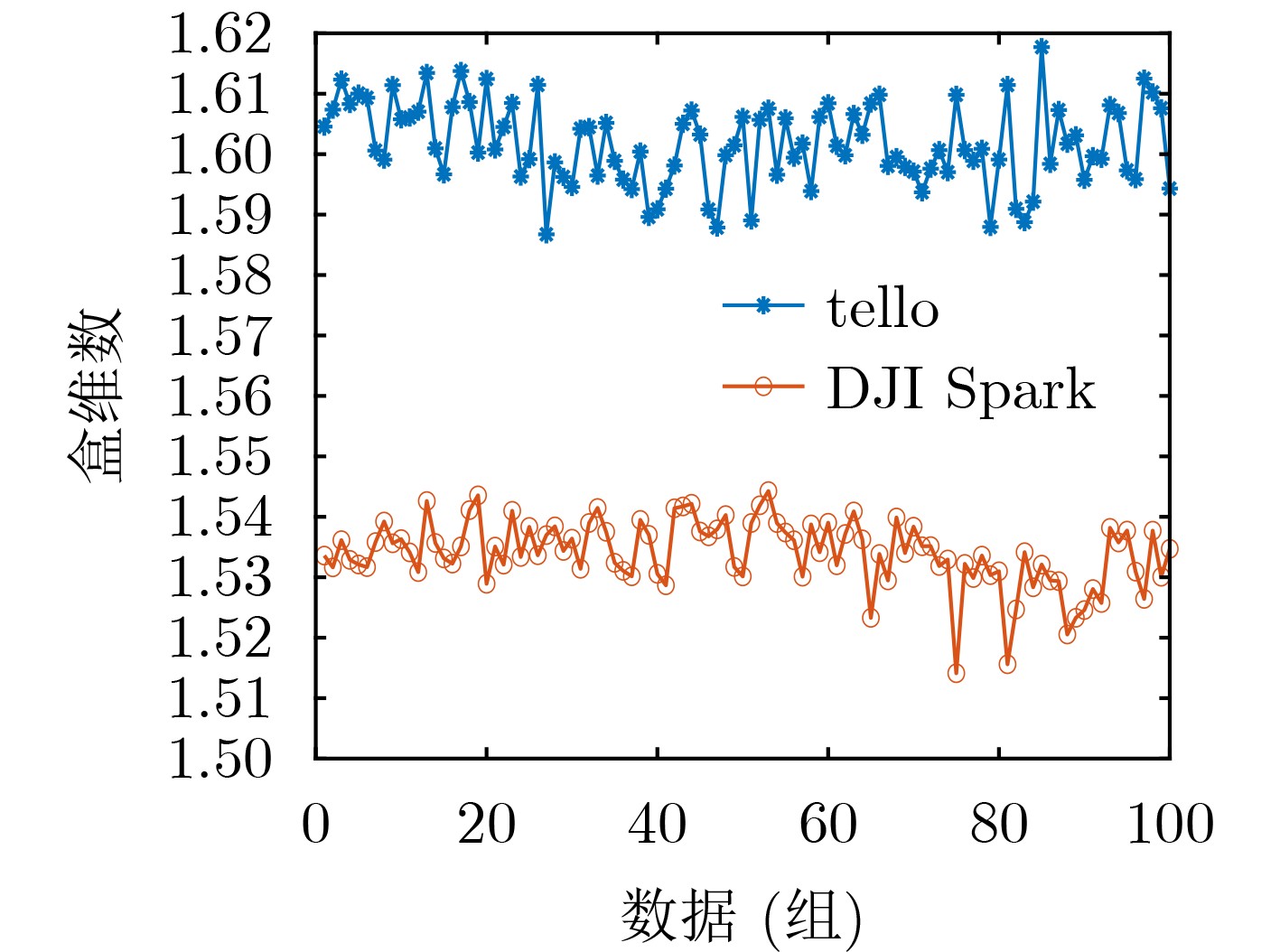
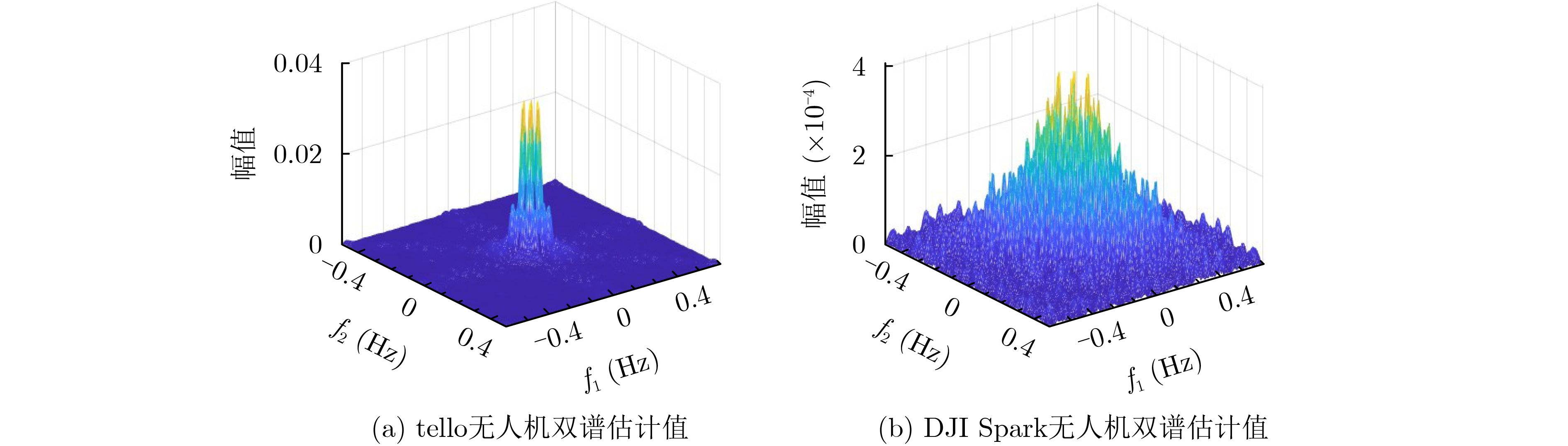
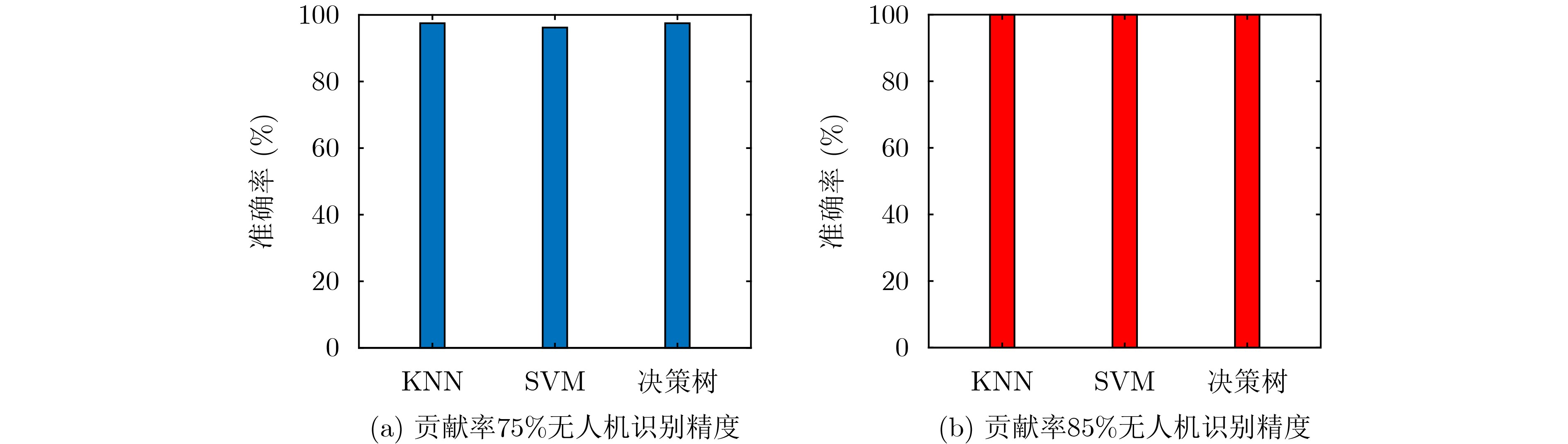
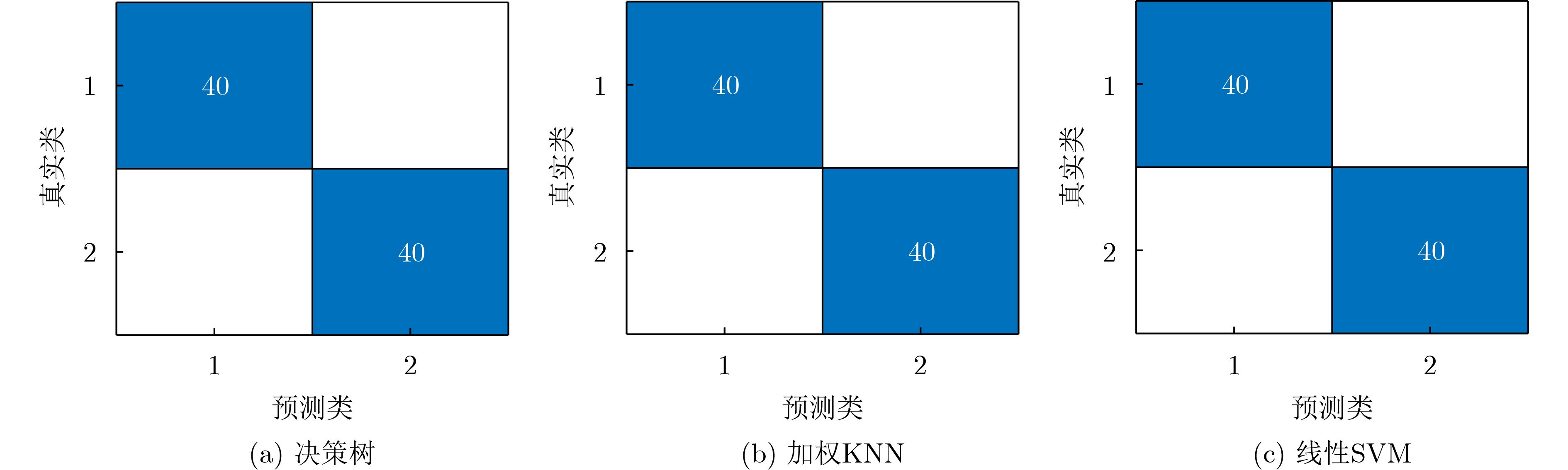
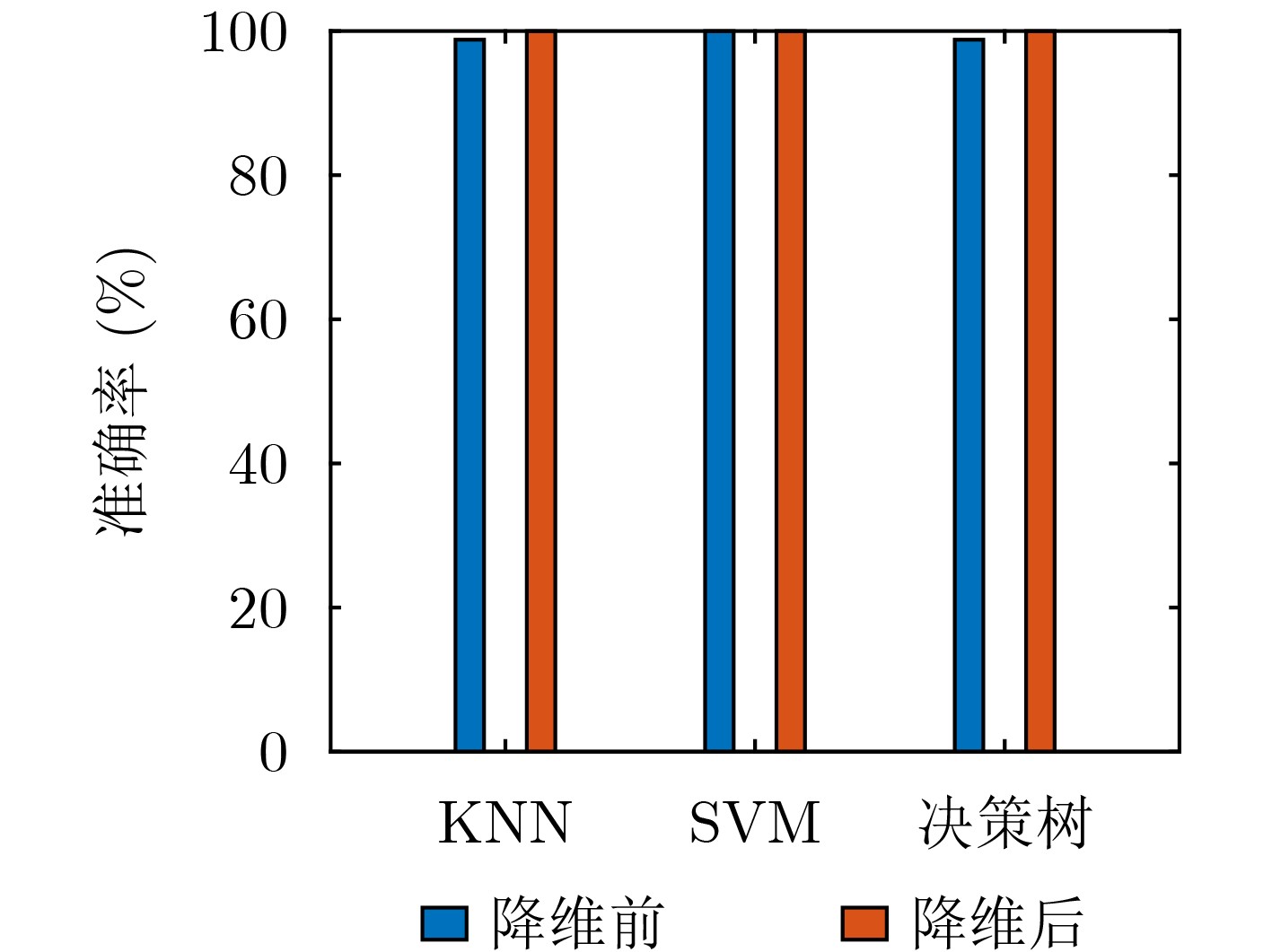
摘要: 如今,无人机(UAVs)在军用民用领域得到大规模应用,在无人机带来便利的同时也带来了巨大的安全隐患。针对无人机的探测识别技术逐渐成为研究热点,传统的无人机探测方法主要是通过获取雷达回波信号、无人机声音信号和光电信号的方式对无人机进行探测。然而,这类方法往往容易受到环境影响具有一定的局限性,无法对无人机进行精确的定位和识别。该文提出一种基于多维信号特征的无人机识别方法,该方法首先通过自适应三角阈值法从接收到的无线信号中探测并筛选出无人机信号,同时解析获取的无线信号的信道状态信息(CSI)。然后,利用正交匹配追踪算法(OMP)进行参数估计来获取无人机的位置信息对无人机进行定位。最后,提取无人机信号中的盒维数和径向积分双谱(RIB)来对无人机进行分类识别。通过实验,该方法对无人机的3维定位精度小于1 m,对无人机的分类识别精度最高能达到100%。Abstract: Nowadays, Unmanned Aerial Vehicles (UAVs) are widely used in military and civilian fields. While UAVs bring convenience, they also bring huge security risks. The detection and identification technology for UAVs has gradually become a research hotspot. The traditional UAV detection method mainly detects UAVs by obtaining radar echoes, UAV sound signals and photoelectric signals. However, such methods are often susceptible to environmental influences and have certain limitations, and cannot accurately locate and identify UAVs. A UAV identification method based on multi-dimensional signal features is proposed in this paper. Firstly, UAV signals from the received wireless signals through the adaptive triangular threshold method are detected and screened, and at the same time the Channel Status Information (CSI) of the acquired wireless signals is analyzed. Then, the Orthogonal Matching Pursuit (OMP) algorithm is used for parameter estimation to obtain the position information of the UAV to locate the UAV. Finally, the box dimension and Radial Integral Bispectrum (RIB) in UAV signals are extracted to classify and identify UAVs. Through experiments, the method's three-dimensional positioning accuracy for UAVs is less than 1 m, and the classification and recognition accuracy for UAVs can reach up to 100%.
-
[1] FU Fang, JIAO Qi, YU F R, et al. Securing UAV-to-vehicle communications: A curiosity-driven deep Q-learning network (C-DQN) approach[C]. 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, Canada, 2021: 1–6. [2] ZHANG Qian, MIAO Jiansong, ZHANG Zhicai, et al. Energy-efficient video streaming in UAV-enabled wireless networks: A safe-DQN approach[C]. GLOBECOM 2020–2020 IEEE Global Communications Conference, Taipei, China, 2020: 1–7. [3] ZHANG Zhicai, WANG Ru, YU F R, et al. QoS aware transcoding for live streaming in edge-clouds aided HetNets: An enhanced actor-critic approach[J]. IEEE Transactions on Vehicular Technology, 2019, 68(11): 11295–11308. doi: 10.1109/TVT.2019.2942629. [4] FU Fang, KANG Yunpeng, ZHANG Zhicai, et al. Soft actor–critic DRL for live transcoding and streaming in vehicular fog-computing-enabled IoV[J]. IEEE Internet of Things Journal, 2021, 8(3): 1308–1321. doi: 10.1109/JIOT.2020.3003398. [5] AKTER R, GOLAM M, LEE J M, et al. Doppler radar-based real-time drone surveillance system using convolution neural network[C]. 2021 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 2021: 474–476. [6] YAACOUB M, YOUNES H, and RIZK M. Acoustic drone detection based on transfer learning and frequency domain features[C]. 2022 International Conference on Smart Systems and Power Management (IC2SPM), Beirut, Lebanon, 2022: 47–51. [7] YAN Jiading, XIE Haibin, and LI Jie. Modeling and optimization of deploying anti-UAV swarm detection systems based on the mixed genetic and monte carlo algorithm[C]. 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 2021: 773–779. [8] JEON S, SHIN J W, LEE Y J, et al. Empirical study of drone sound detection in real-life environment with deep neural networks[C]. 2017 25th European Signal Processing Conference (EUSIPCO), Kos, Greece, 2017: 1858–1862. [9] SALMAN S, MIR J, FAROOQ M T, et al. Machine learning inspired efficient audio drone detection using acoustic features[C]. 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 2021: 335–339. [10] LOU Changyu, ZHAO Jingcheng, ZHANG Ke, et al. UAV detection and positioning based on 5G base station real aperture in 5G network[C]. 2022 International Conference on Information Processing and Network Provisioning (ICIPNP), Beijing, China, 2022: 82–86. [11] OH B S and LIN Zhiping. Extraction of global and local micro-Doppler signature features from FMCW radar returns for UAV detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(2): 1351–1360. doi: 10.1109/TAES.2020.3034020. [12] HALL J, BARBEAU M, and KRANAKIS E. Detection of transient in radio frequency fingerprinting using signal phase[C]. IASTED International Conference on Wireless and Optical Communications, Banff, Canada, 2003: 13–18. [13] 余沁, 程伟, 李敬文. 利用小波变换特征提取的通信辐射源个体识别方法[J]. 信号处理, 2018, 34(9): 1076–1085. doi: 10.16798/j.issn.1003-0530.2018.09.008.YU Qin, CHENG Wei, and LI Jingwen. Specific emitter identification using wavelet transform feature extraction[J]. Journal of Signal Processing, 2018, 34(9): 1076–1085. doi: 10.16798/j.issn.1003-0530.2018.09.008. [14] 刘传波. 一种基于稀疏表示的雷达辐射源识别方法[J]. 舰船电子工程, 2020, 40(10): 72–75. doi: 10.3969/j.issn.1672-9730.2020.10.018.LIU Chuanbo. A radar emitter recognition method based on sparse representation[J]. Ship Electronic Engineering, 2020, 40(10): 72–75. doi: 10.3969/j.issn.1672-9730.2020.10.018. [15] DANEV B and CAPKUN S. Transient-based identification of wireless sensor nodes[C]. 2009 International Conference on Information Processing in Sensor Networks, San Francisco, USA, 2009: 25–36. [16] 王培. 基于稳态信号的射频指纹算法的研究[D]. [硕士论文], 电子科技大学, 2020.WANG Pei. Research on RF fingerprint algorithm based on steady state signal[D]. [Master dissertation], University of Electronic Science and Technology of China, 2020. [17] PENG Linning, ZHANG Junqing, LIU Ming, et al. Deep learning based RF fingerprint identification using differential constellation trace figure[J]. IEEE Transactions on Vehicular Technology, 2020, 69(1): 1091–1095. doi: 10.1109/TVT.2019.2950670. [18] HUANG Guangquan, YUAN Yingjun, WANG Xiang, et al. Specific emitter identification based on nonlinear dynamical characteristics[J]. Canadian Journal of Electrical and Computer Engineering, 2016, 39(1): 34–41. doi: 10.1109/CJECE.2015.2496143. [19] ZACK G W, ROGERS W E, and LATT S A. Automatic measurement of sister chromatid exchange frequency[J]. Journal of Histochemistry & Cytochemistry, 1977, 25(7): 741–753. doi: 10.1177/25.7.70454. [20] OBEIDAT H A, OBEIDAT O A, MOSLEH M F, et al. Verifying received power predictions of wireless insite software in indoor environments at WLAN frequencies[J]. The Applied Computational Electromagnetics Society Journal (ACES), 2020, 35(10): 1119–1126. doi: 10.47037/2020.ACES.J.351003. [21] 刘寅. 基于稀疏信号重构的空间谱估计算法研究[D]. [博士论文], 西安电子科技大学, 2012.LIU Yin. Research on algorithms of spatial spectrum estimation based on sparse signal reconstruction[D]. [Ph. D. dissertation], Xidian University, 2012. [22] HIGUCHI T. Approach to an irregular time series on the basis of the fractal theory[J]. Physica D:Nonlinear Phenomena, 1988, 31(2): 277–283. doi: 10.1016/0167-2789(88)90081-4. [23] NIKIAS C L and RAGHUVEER M R. Bispectrum estimation: A digital signal processing framework[J]. Proceedings of the IEEE, 1987, 75(7): 869–891. doi: 10.1109/PROC.1987.13824. [24] CHANDRAN V and ELGAR S L. Pattern recognition using invariants defined from higher order spectra-one dimensional inputs[J]. IEEE Transactions on Signal Processing, 1993, 41(1): 205–212. doi: 10.1109/TSP.1993.193139. [25] 于凤楠. 双谱分析方法在水下目标特征提取中的应用[D]. [硕士论文], 哈尔滨工程大学, 2010.YU Fengnan. Bispectrum analysis method applied to extraction of features of underwater target[D]. [Master dissertation], Harbin Engineering University, 2010. -

 下载:
下载:



图(13) / 表(3)
计量
- 文章访问数: 2227
- HTML全文浏览量: 1527
- PDF下载量: 441
- 被引次数: 0
