

Virtualization of the Programmable Data Plane for Supporting Coexistence of Multiple Network Functions
-
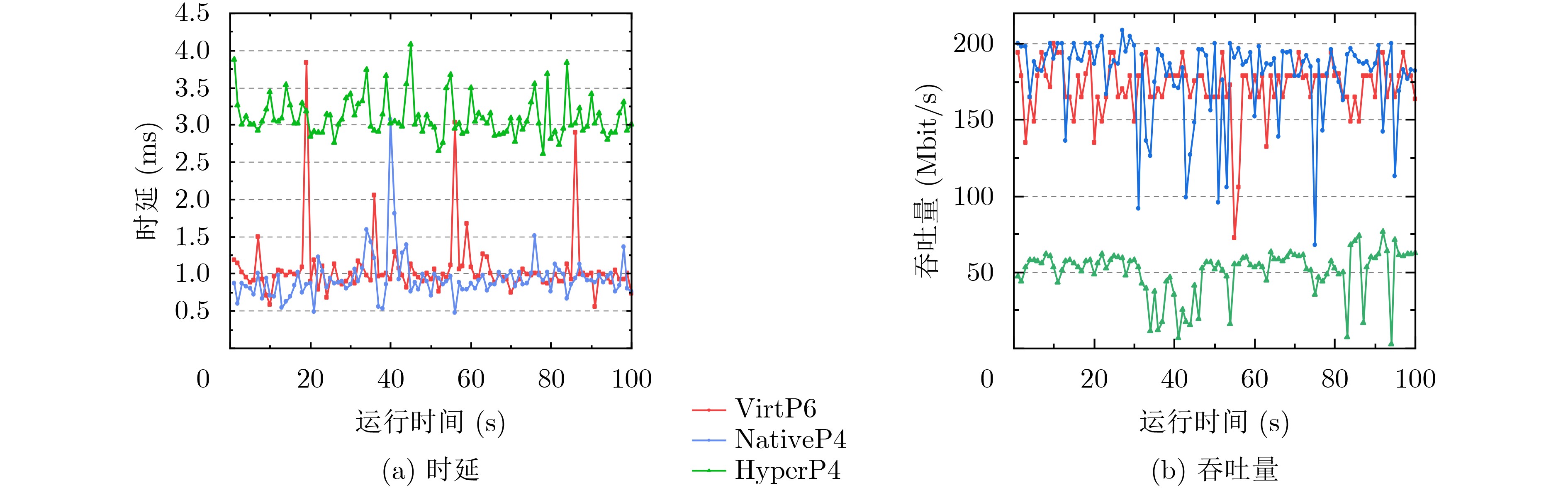
摘要: 网络虚拟化允许多个虚拟网络在同一物理基础设施上共存,有利于未来网络技术的增量部署。然而,当前可编程数据平面提供独占的数据平面抽象难以同时支持多个网络功能,该文提出一种支持并行流水线的虚拟化可编程数据平面结构(Virtualized P4-based Programmable Data Plane architecture with Parallel Pipeline,VirtP6),允许在单个物理设备上运行多个相互隔离的网络功能。VirtP6改变了可编程数据平面的单一流水线结构,引入并行的多个数据包处理流水线,实现了可编程数据平面的虚拟化,并保证了不同虚拟网络功能之间的资源隔离、流量隔离和访问隔离。最后,针对VirtP6的虚拟化开销、隔离性、可扩展性、网络适用性能进行实验评估。实验结果显示,与HyperP4相比,VirtP6大大降低了虚拟化开销,将延迟减少了68%,吞吐量提高了75%,具有良好的隔离性和扩展性。Abstract: Network virtualization allows multiple virtual networks to coexist on the same physical infrastructure, facilitating the incremental deployment of future network technology. However, the current programmable data plane provides exclusive data plane abstract that is difficult to support multiple network functions simultaneously. A Virtualized P4-based Programmable Data Plane architecture with Parallel Pipeline (VirtP6) is proposed, which allows multiple isolated virtual network functions to run on a single physical device. The single pipeline structure of the programmable data plane is changed. Then, multiple parallel packet processing pipelines are ensured to realize the virtualization of the programmable data plane, and resource isolation, traffic isolation and access isolation between different virtual network functions are introduced. Finally, the virtualization overhead, isolation, scalability, and network applicability of VirtP6 are evaluated. Experimental results show that compared with HyperP4, VirtP6 reduces greatly virtualization overhead, reduces latency by 68%, improves throughput by 75%, and has good isolation and scalability.
-
Key words:
- Programmable data plane /
- Network virtualization /
- Parallel pipeline /
- Network function
-
算法1 VirtP6管理程序结构体 struct standard_metadata_t { bit<32> virtual_function_id; } extern select_function (inout standard_metadata_t meta, in virtual_function_id VF_id) { meta.virtual_function_id = VF_id; } extern Virtual_Function_Pipeline{ Virtual_Function_Pipeline (in virtual_function_id ); } parser Parser<H, M>(packet_in b, out H parsed_hdr, inout M VF_meta, inout standard_metadata_t meta); control Ingress_Pipeline <H, M>(inout H hdr, inout M meta, inout standard_metadata_t meta); control Egress_Pipeline <H, M>(inout H hdr, inout M meta, inout standard_metadata_t meta); control Deparser<H>(packet_out b, in H hdr); package VirtP6_Pipeline (Parser<H, M> p, Ingress_Pipeline<H, M> ig, Virtual_Function_Pipeline vfp, Egress_Pipeline<H, M> eg, Deparser<H> dep);  下载: 导出CSV
下载: 导出CSV
算法2 网络功能流水线结构体 parser Parser<H, M>(packet_in b, out H parsed_hdr, inout M VF_meta, inout standard_metadata_t meta); control VF_Pipeline <H, M>(inout H hdr, inout M meta, inout standard_metadata_t meta); control Deparser<H>(packet_out b, in H hdr); package Virtual_Function_Pipeline( Parser<H, M> p, VF_Pipeline<IH, IM> ieg, Deparser<H> dep);
下载: 导出CSV
-
[1] KUMAR D, RAY S, and ADHIKARI S. Future communication networks: Architectures, protocols, and mechanisms for the next-generation internet[M]. KUMAR P, TOMAR A, and SHARMILA R. Emerging Technologies in Computing. New York: Chapman and Hall/CRC, 2021: 241–267. [2] ZHANG Hongke, QUAN Wei, CHAO H C, et al. Smart identifier network: A collaborative architecture for the future internet[J]. IEEE Network, 2016, 30(3): 46–51. doi: 10.1109/MNET.2016.7474343 [3] MAHMOOD Y and ABDULQADER A. A platform for porting IPv4 applications to IPv6[J]. International Journal of Computing and Digital Systems, 2021, 10(1): 501–509. doi: 10.12785/ijcds/100148 [4] DE JONG K, FAHRENFORT C, YOUNIS A, et al. Sharing digital object across data infrastructures using Named Data Networking (NDN)[C]. 20th IEEE/ACM International Symposium on Cluster, Cloud and Internet Computing (CCGRID), Melbourne, Australia, 2020: 873–880. [5] ULLAH A, CHEN Xiang, and YANG Jian. Design and implementation of MobilityFirst future internet testbed[C]. 2020 3rd International Conference on Hot Information-Centric Networking (HotICN), Hefei, China, 2020: 170–174. [6] FANG Dong, CHENG Chengqi, and GUO Shide. Design and research on GeoIP[C]. The 2010 14th International Conference on Computer Supported Cooperative Work in Design, Shanghai, China, 2010: 13–17. [7] HU Yuxiang, LI Dan, SUN Penghao, et al. Polymorphic smart network: An open, flexible and universal architecture for future heterogeneous networks[J]. IEEE Transactions on Network Science and Engineering, 2020, 7(4): 2515–2525. doi: 10.1109/TNSE.2020.3006249 [8] UNNIKRISHNAN D, VADLAMANI R, LIAO Yong, et al. Reconfigurable data planes for scalable network virtualization[J]. IEEE Transactions on Computers, 2013, 62(12): 2476–2488. doi: 10.1109/TC.2012.155 [9] KAUR S, KUMAR K, and AGGARWAL N. A review on P4-Programmable data planes: Architecture, research efforts, and future directions[J]. Computer Communications, 2021, 170: 109–129. doi: 10.1016/j.comcom.2021.01.027 [10] 祝现威, 常朝稳, 秦晰, 等. 面向安全协议的虚拟化可编程数据平面[J]. 电子与信息学报, 2021, 43(1): 226–233. doi: 10.11999/JEIT190720ZHU Xianwei, CHANG Chaowen, QIN Xi, et al. VCP4: Virtualization of the programmable data plane for security protocol[J]. Journal of Electronics &Information Technology, 2021, 43(1): 226–233. doi: 10.11999/JEIT190720 [11] RAJ S, MANGAL N, SAVITHA S, et al. Virtual machine migration in heterogeneous clouds-a practical approach[C]. 2020 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 2020: 1–6. [12] GAUTAM G, RATHEE S, PATIL P, et al. A scalable container-based virtualized data center emulation framework[C]. 14th International Conference on Communication Systems & Networks (COMSNETS), Bangalore, India, 2022: 452–454. [13] LEE K, HONG C H, HWANG J, et al. Dynamic network scheduling for virtual routers[J]. IEEE Systems Journal, 2020, 14(3): 3618–3629. doi: 10.1109/JSYST.2019.2939409 [14] HANCOCK D and VAN DER MERWE J. HyPer4: Using P4 to virtualize the programmable data plane[C]. Proceedings of the 12th International on Conference on emerging Networking Experiments and Technologies, Irvine, USA, 2016: 35–49. [15] ZHANG Cheng, BI Jun, ZHOU Yu, et al. HyperVDP: High-performance virtualization of the programmable data plane[J]. IEEE Journal on Selected Areas in Communications, 2019, 37(3): 556–569. doi: 10.1109/JSAC.2019.2894308 [16] ZHOU Yu and BI Jun. ClickP4: Towards modular programming of P4[C]. Posters and Demos Proceedings of the Conference of the ACM Special Interest Group on Data Communication, Los Angeles, USA, 2017: 100–102. [17] STOYANOV R and ZILBERMAN N. MTPSA: Multi-tenant programmable switches[C]. Proceedings of the 3rd P4 Workshop in Europe, Barcelona Spain, 2020: 43–48. [18] SAQUETTI M, BUENO G, CORDEIRO W, et al. P4VBox: Enabling P4-based switch virtualization[J]. IEEE Communications Letters, 2020, 24(1): 146–149. doi: 10.1109/LCOMM.2019.2953031 [19] BOSSHART P, DALY D, GIBB G, et al. P4: Programming protocol-independent packet processors[J]. ACM SIGCOMM Computer Communication Review, 2014, 44(3): 87–95. doi: 10.1145/2656877.2656890 [20] P4. org. Behavioral Model Targets. P4 Language Consortium[EB/OL]. https://github.com/p4lang/behavioral-model, 2016. [21] SHERWOOD R, GIBB G, YAP K K, et al. Flowvisor: A network virtualization layer[J]. OpenFlow Switch Consortium, Tech. Rep, 2009, 1: 132. [22] VICISANO L and BAS S. Announcing P4Runtime—A Contribution by the P4 API Working Group. P4 Language Consortium[EB/OL]. https://opennetworking.org/news-and-events/blog/announcing-p4runtime-a-contribution-by-the-p4-api-working-group/, 2017. [23] XIANG Zuo and SEELING P. Mininet: An instant virtual network on your computer[M]. FITZEK F H P, GRANELLI F, SEELING P. Computing in Communication Networks. Amsterdam: Academic Press, 2020: 219–230. -


 下载:
下载:






图(11) / 表(2)
计量
- 文章访问数: 706
- HTML全文浏览量: 688
- PDF下载量: 52
- 被引次数: 0
