

Target Association and Tracking Approach Based on Historical Kinematic Characteristics and SVM Spectrum Classification for Passive Sonar
-
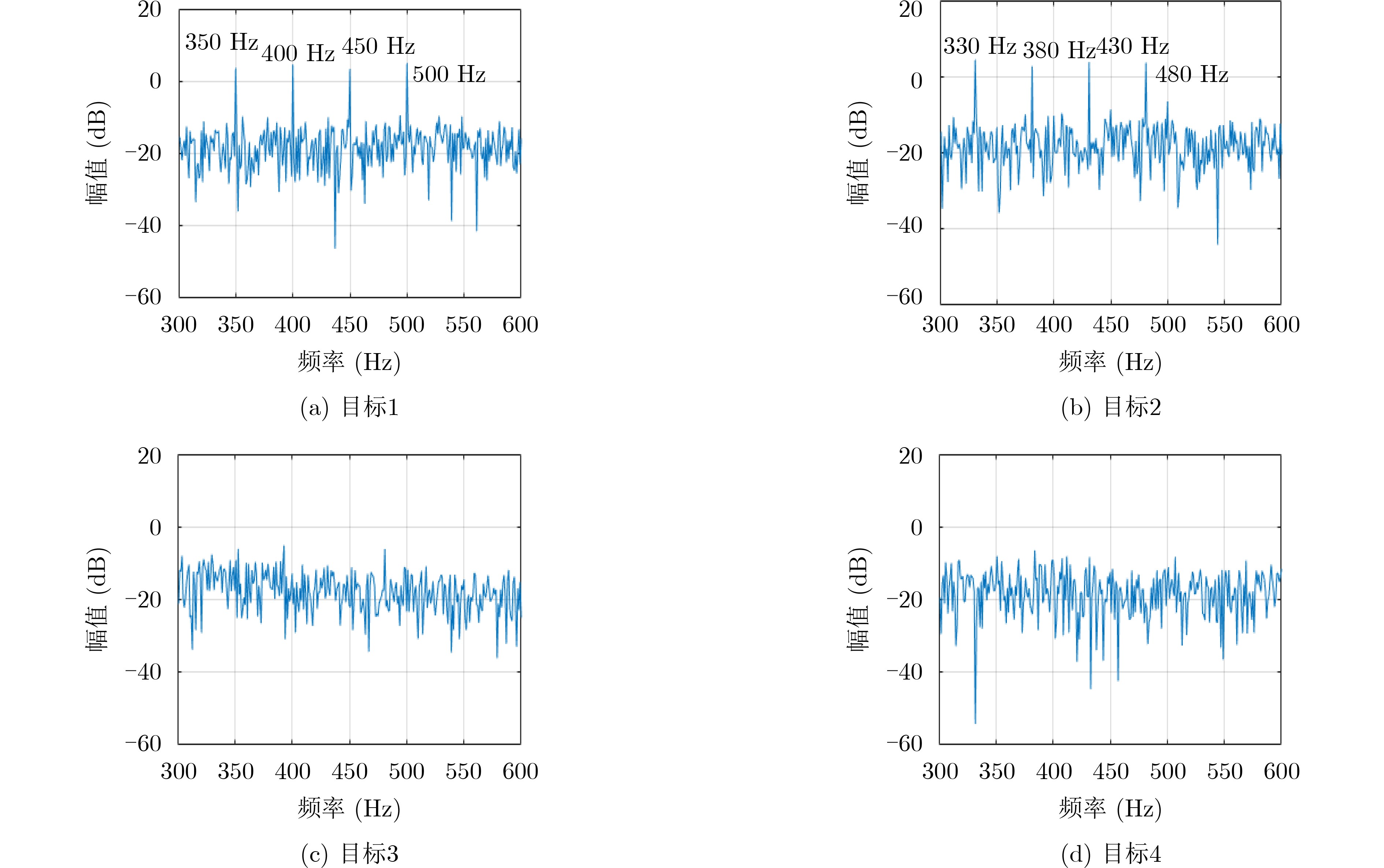
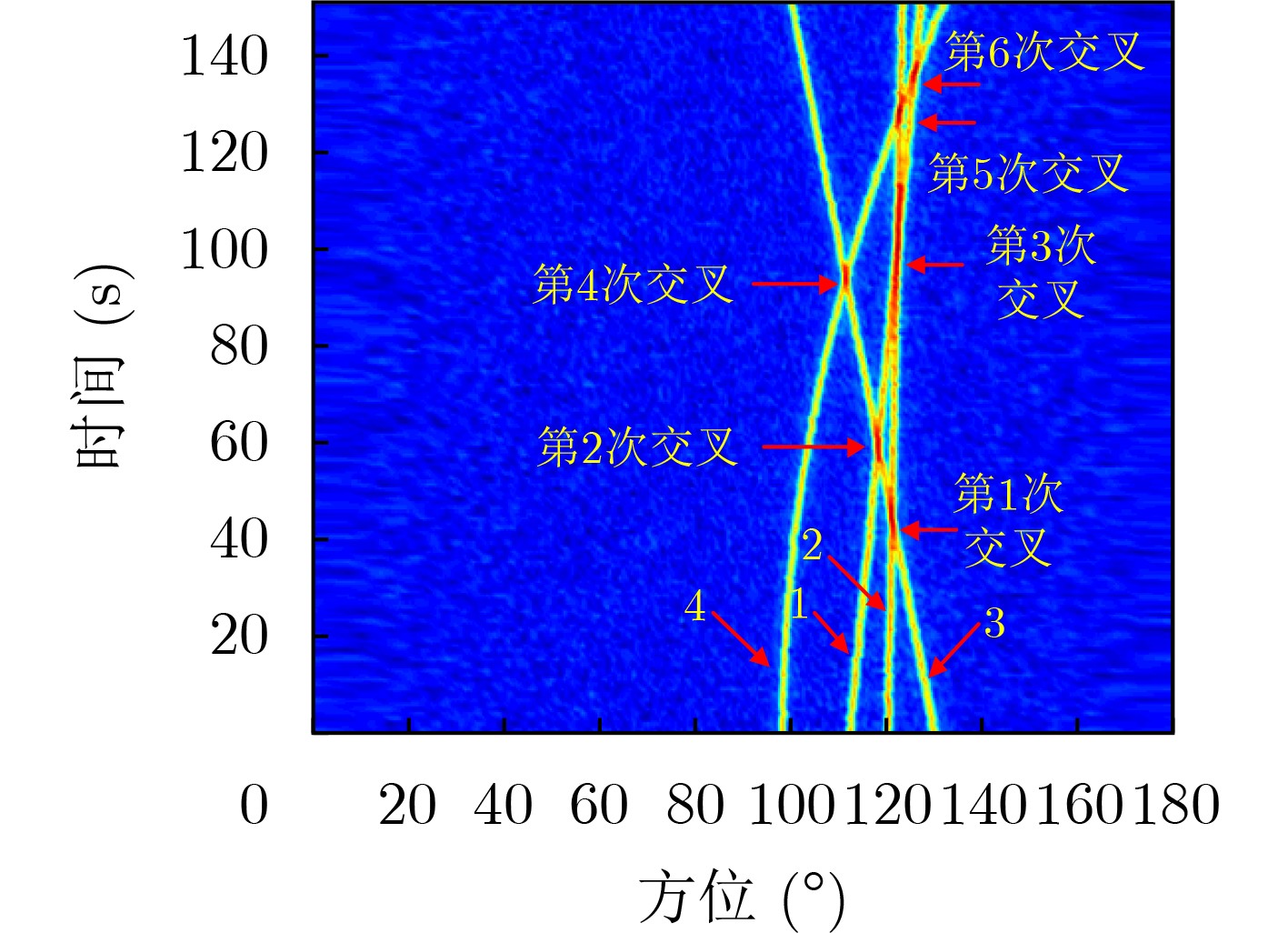
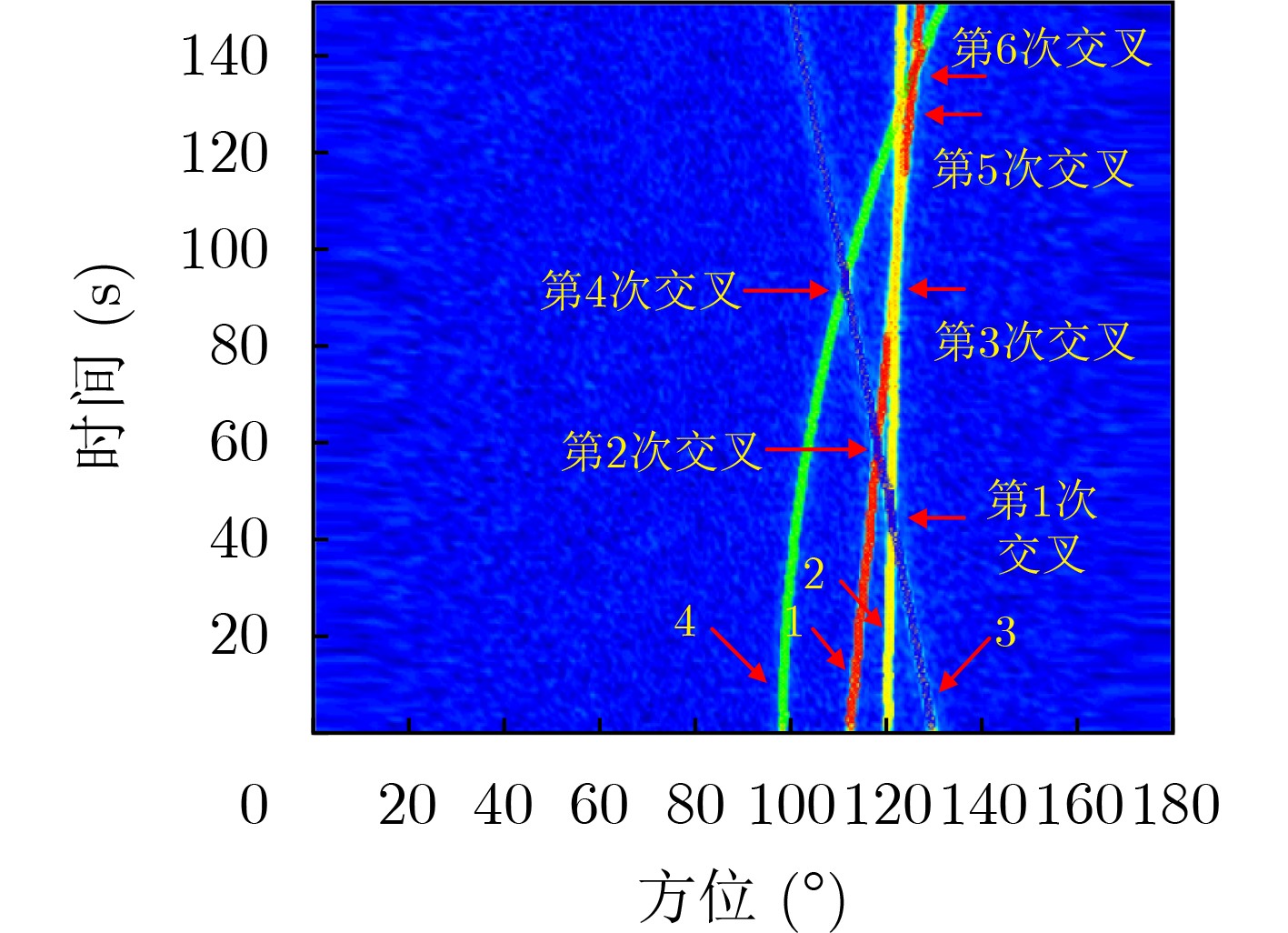
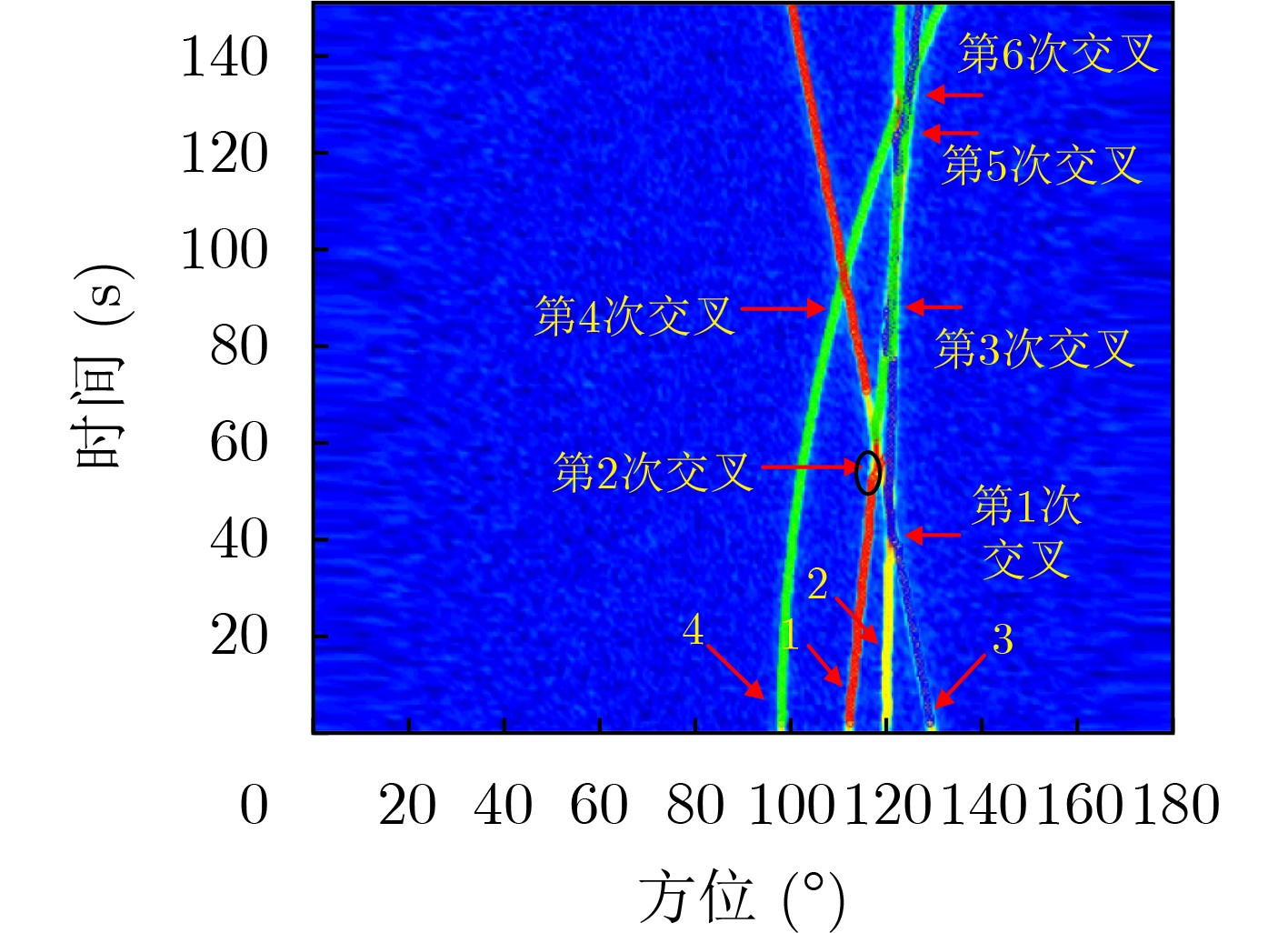
摘要: 针对航迹交叉条件下被动声呐目标跟踪困难的问题,该文将现有运动特征关联方法和信号特征辅助关联方法进行改进融合,提出一种基于历史运动特征约束和支持向量机(His-SVM)频谱分类的被动声呐目标关联跟踪方法。首先,利用目标的历史航迹点提取历史方位变化率,作为重合条件下点航迹关联的主要特征;其次,将方位靠近目标的点迹关联问题转化为点迹频谱的分类问题,利用目标航迹点频谱训练的SVM模型完成待关联点迹频谱的分类,根据分类结果实现方位靠近目标的点航迹关联;最后,将两种方法有机融合,构建了被动声呐交叉重合目标关联跟踪的算法框架。仿真实验结果表明,该算法能够有效完成靠近目标的点迹分类和交叉重合目标的关联跟踪,其跟踪性能优于传统运动特征关联跟踪算法。Abstract: In order to solve the crossing target tracking problem for passive sonar, a target association and tracking approach based on Historical kinematic characteristics and SVM (His-SVM) spectrum classification is presented, which combines the improved kinematic feature association method with the revised signal feature association method. The historical bearing changing rate is firstly extracted from historical track points to be used as a main feature for the overlapping target association and tracking. Furthermore, the SVM model, which is trained by the spectrum of track points, is utilized to classify the close trace points and each trace points can be assigned to different targets according to the classification results. Finally, the framework of the crossing target tracking algorithm is constructed by integrating historical kinematic characteristics with the SVM spectrum classification. The results of simulation studies verify the effectiveness of the proposed approach for close target association and crossing target tracking, and indicate that the tracking performance of the proposed approach is better than the traditional kinematic feature association method.
-
表 1 SVM与相关系数方法分类正确率(%)比较
目标1、2分类 目标2、3分类 目标3、4分类 目标1、2分类
(线谱漂移)目标2、3分类
(线谱漂移)目标1 目标2 目标2 目标3 目标3 目标4 目标1 目标2 目标2 目标3 SVM(60 s训练) 100 100 100 100 99.58 100 100 100 100 100 SVM(30 s训练) 100 100 100 100 98.89 100 97.41 97.41 100 100 相关系数 100 100 100 89.58 98.75 47.50 75 77.92 74.58 90.83  下载: 导出CSV
下载: 导出CSV
表 2 5种算法处理性能比较
His-SVM Tra His Tra-SVM MHT 跟踪误差(°) 0.18 2.93 0.32 2.48 0.33 处理时间(s) 0.015 0.009 0.009 0.011 0.019
下载: 导出CSV
-
[1] SUN Lili, CAO Yunhe, WU Wenhua, et al. A multi-target tracking algorithm based on Gaussian mixture model[J]. Journal of Systems Engineering and Electronics, 2020, 31(3): 482–487. doi: 10.23919/JSEE.2020.000020 [2] ZHANG Hongwei and XIE Weixin. Constrained unscented Kalman filtering for bearings-only maneuvering target tracking[J]. Chinese Journal of Electronics, 2020, 29(3): 501–507. doi: 10.1049/cje.2020.02.006 [3] KUMAR D V A N R. Hybrid unscented Kalman filter with rare features for underwater target tracking using passive sonar measurements[J]. Optik, 2021, 226: 165813. doi: 10.1016/j.ijleo.2020.165813 [4] 王宇杰, 李宇, 鞠东豪, 等. 一种基于水下无人航行器的多目标被动跟踪算法[J]. 电子与信息学报, 2020, 42(8): 2013–2020. doi: 10.11999/JEIT190675WANG Yujie, LI Yu, JU Donghao, et al. A multi-target passive tracking algorithm based on unmanned underwater vehicle[J]. Journal of Electronics &Information Technology, 2020, 42(8): 2013–2020. doi: 10.11999/JEIT190675 [5] VARGHESE S, SINCHU P, and BHAI D S. Tracking crossing targets in passive sonars using NNJPDA[J]. Procedia Computer Science, 2016, 93: 690–696. doi: 10.1016/j.procs.2016.07.266 [6] 郭龙祥, 虞涵钧, 生雪莉, 等. 基于协同探测数据融合的水下多目标跟踪[J]. 水下无人系统学报, 2018, 26(5): 387–394. doi: 10.11993/j.issn.2096-3920.2018.05.002GUO Longxiang, YU Hanjun, SHENG Xueli, et al. Underwater multi-target tracking based on collaborative detection data fusion[J]. Journal of Unmanned Undersea Systems, 2018, 26(5): 387–394. doi: 10.11993/j.issn.2096-3920.2018.05.002 [7] 李晓花, 李亚安, 鲁晓锋, 等. 强干扰环境下水下纯方位PMHT多目标跟踪[J]. 西北工业大学学报, 2020, 38(2): 359–365. doi: 10.3969/j.issn.1000-2758.2020.02.017LI Xiaohua, LI Ya’an, LU Xiaofeng, et al. Underwater bearing-only multitarget tracking in dense clutter environment based on PMHT[J]. Journal of Northwestern Polytechnical University, 2020, 38(2): 359–365. doi: 10.3969/j.issn.1000-2758.2020.02.017 [8] 谢志华, 蒋丞, 吴俊超, 等. 水下目标多平台协同定位和跟踪方法[J]. 声学学报, 2021, 46(6): 1028–1038. doi: 10.15949/j.cnki.0371-0025.2021.06.022XIE Zhihua, JIANG Cheng, WU Junchao, et al. Method of multi-platform cooperative localization and tracking for underwater targets[J]. ACTA Acustica, 2021, 46(6): 1028–1038. doi: 10.15949/j.cnki.0371-0025.2021.06.022 [9] 王森, 王余, 王易川, 等. 水下高速目标声谱图特征提取及分类设计[J]. 电子与信息学报, 2017, 39(11): 2684–2689. doi: 10.11999/JEIT170283WANG Sen, WANG Yu, WANG Yichuan, et al. Feature extraction and classification of spectrum of radiated noise of underwater high speed vehicle[J]. Journal of Electronics &Information Technology, 2017, 39(11): 2684–2689. doi: 10.11999/JEIT170283 [10] MELLEMA G R. Improved active sonar tracking in clutter using integrated feature data[J]. IEEE Journal of Oceanic Engineering, 2020, 45(1): 304–318. doi: 10.1109/JOE.2018.2870234 [11] 何友, 修建娟, 张晶炜, 等. 雷达数据处理及应用[M]. 北京: 电子工业出版社, 2006: 119–127.HE You, XIU Jianjuan, ZHANG Jingwei, et al. Radar Data Processing with Applications[M]. Beijing: Publishing House of Electronics Industry, 2006: 119–127. [12] 王永良, 丁前军, 李荣锋. 自适应阵列处理[M]. 北京: 清华大学出版社, 2015: 1–8.WANG Yongliang, DING Qianjun, and LI Rongfeng. Adaptive Array Processing[M]. Beijing: Tsinghua University Press, 2015: 1–8. [13] 卢彪. 复杂条件下时间方位历程图中目标轨迹提取与检测[D]. [硕士论文], 华中科技大学, 2017.LU Biao. Extraction and detection of target trajectory in bearing-time records under complex condition[D]. [Master dissertation], Huazhong University of Science and Technology, 2017. [14] QIAN Yuning, YAN Ruqiang, and HU Shijie. Bearing degradation evaluation using recurrence quantification analysis and Kalman filter[J]. IEEE Transactions on Instrumentation and Measurement, 2014, 63(11): 2599–2610. doi: 10.1109/TIM.2014.2313034 [15] 李理, 李向欣, 殷敬伟. 基于生成对抗网络的舰船辐射噪声分类方法研究[J]. 电子与信息学报, 2022, 44(6): 1974–1983. doi: 10.11999/JEIT211077LI Li, LI Xiangxin, and YIN Jingwei. Research on classification algorithm of ship radiated noise data based on generative adversarial network[J]. Journal of Electronics &Information Technology, 2022, 44(6): 1974–1983. doi: 10.11999/JEIT211077 [16] 任超. 基于支持向量机的水下目标识别技术[D]. [硕士论文], 西北工业大学, 2016.REN Chao. A underwater target recognition technique based on support vector machine[D]. [Master dissertation], Northwestern Polytechnical University, 2016. [17] 孟庆昕, 杨士莪, 于盛齐. 基于波形结构特征和支持向量机的水面目标识别[J]. 电子与信息学报, 2015, 37(9): 2117–2123. doi: 10.11999/JEIT150139MENG Qingxin, YANG Shi’e, and YU Shengqi. Recognition of marine acoustic target signals based on wave structure and support vector machine[J]. Journal of Electronics &Information Technology, 2015, 37(9): 2117–2123. doi: 10.11999/JEIT150139 [18] 关鑫, 李然威, 胡鹏, 等. 基于改进支持向量机的水声目标-杂波不平衡分类研究[J]. 应用声学, 2021, 40(5): 715–722. doi: 10.11684/j.issn.1000-310X.2021.05.009GUAN Xin, LI Ranwei, HU Peng, et al. The imbalanced classification of underwater acoustic target-clutter based on improved support vector machine[J]. Journal of Applied Acoustics, 2021, 40(5): 715–722. doi: 10.11684/j.issn.1000-310X.2021.05.009 -

 下载:
下载:




图(13) / 表(2)
计量
- 文章访问数: 1082
- HTML全文浏览量: 782
- PDF下载量: 84
- 被引次数: 0
