

UAV Trajectory Planning and Resource Joint Optimization Method Based on Content-aware
-
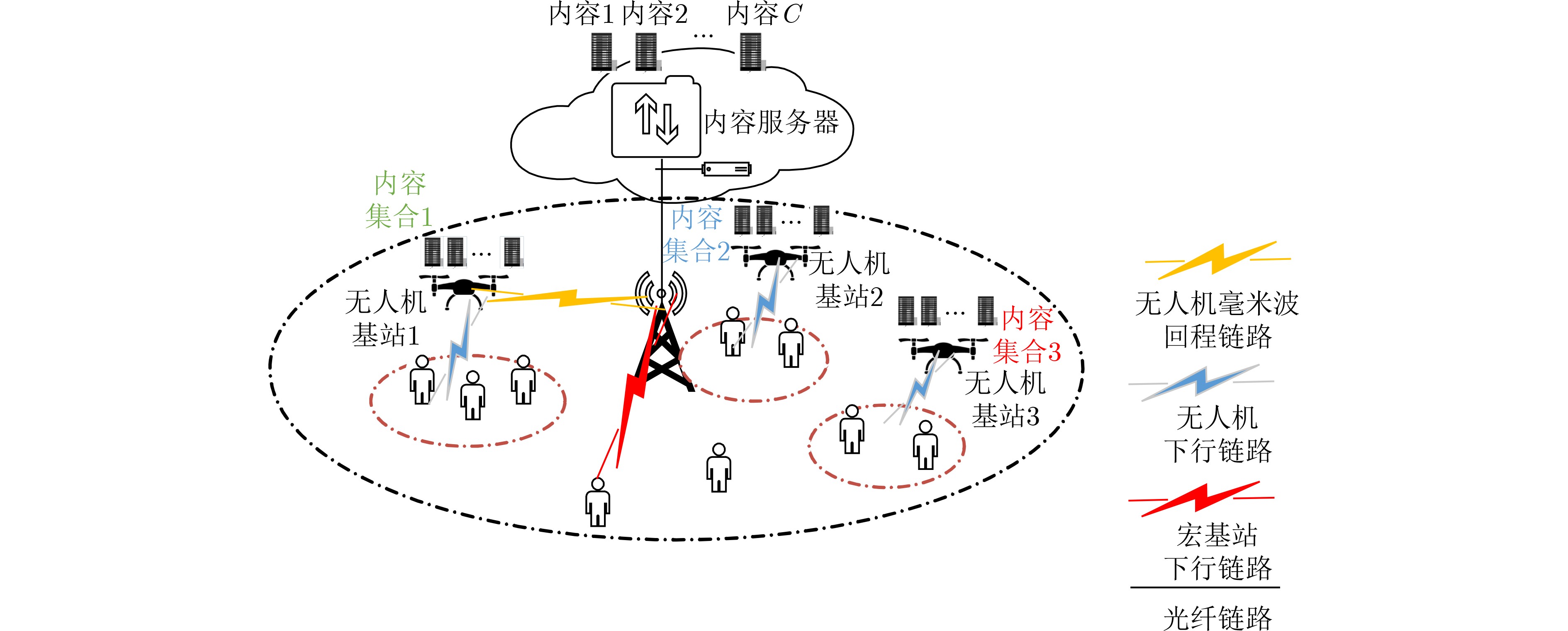
摘要: 针对未来网络中激增的数据流量以及用户多样化的业务需求,利用无人机来辅助蜂窝网络为用户提供更好的服务。该文提出了基于内容感知的无人机轨迹规划和资源分配联合优化方法,在无人机上缓存热点内容,在满足用户内容需求的条件下,联合优化用户接入以及无人机飞行轨迹来最大化最小用户平均服务速率。由于所建立的优化问题具有非凸性,该文提出了一种块坐标下降的方法将原问题分解为两个子问题,并利用连续凸优化方法对问题进行求解。仿真结果表明,所提方法能够有效提升最小用户平均服务速率,提升网络深度覆盖水平。Abstract: In view of the surge in data traffic and the diversified needs of users in the future 6G network, using UAV to assist the cellular network can provide users with better services. This paper proposes a UAV trajectory planning and resource allocation joint optimization method based on content-aware. Hot content is cached on UAV. Under the condition of satisfying the user’s content demand, user association and UAV trajectory are jointly optimized to maximize the minimum average service rate of users. Since the established optimization problem is non-convex, a block coordinate descent method is proposed to decompose the original problem into two sub-problems and the trajectory planning problem is solved by continuous convex optimization method. The simulation results show that the proposed method can effectively improve the minimum user average service rate and the network depth coverage level.
-
Key words:
- UAV communication /
- Trajectory planning /
- Content cache /
- Continuous convex optimization
-
算法1 算法整体流程 1.初始化无人机缓存状态,包括流行度内容以及部分其他内容 2.对$ {{\boldsymbol{A}}^0} $和$ {{\boldsymbol{L}}^0} $进行初始化,并设置算法阈值 3.重复 4.对于一组给定的$\{ {{\boldsymbol{A}}^t},{{\boldsymbol{L}}^t}\}$,对优化问题P2进行求解,得到最
优用户接入方案${{\boldsymbol{A}}^{t + 1} }$5.对于给定的$\{ {{\boldsymbol{A}}^{t + 1} },{{\boldsymbol{L}}^t}\}$,对优化问题P5进行求解,得到无人
机轨迹${{\boldsymbol{L}}^{t + 1} }$6.更新t = t+1 7.直到$\left| {\eta \left( { {{\boldsymbol{A}}^{t + 1} },{{\boldsymbol{L}}^{t + 1} } } \right) - \eta \left( { {{\boldsymbol{A}}^t},{{\boldsymbol{L}}^t} } \right)} \right| \le \theta$($ \theta $为步骤1预设值)  下载: 导出CSV
下载: 导出CSV
表 1 仿真相关参数
参数名 参数值 用户数K 5~40个 无人机高度H 30 m 加性高斯白噪声$ {\sigma }^{2} $ –110 dBm 距离1m处的参考信号增益$ {\rho }_{0} $ –60 dB 无人机发射功率P 0.2 W 无人机最大飞行速度 50 m/s 最小时隙长度 5 s
下载: 导出CSV
-
[1] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics &Information Technology, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789 [2] KHUWAJA A A, CHEN Yunfei, ZHAO Nan, et al. A survey of channel modeling for UAV communications[J]. IEEE Communications Surveys & Tutorials, 2018, 20(4): 2804–2821. doi: 10.1109/COMST.2018.2856587 [3] DUO Bin, WU Qingqing, YUAN Xiaojun, et al. Anti-jamming 3D trajectory design for UAV-enabled wireless sensor networks under probabilistic LoS channel[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 16288–16293. doi: 10.1109/TVT.2020.3040334 [4] ZHANG Liang, CELIK A, DANG Shuping, et al. Energy-efficient trajectory optimization for UAV-assisted IoT networks[J]. IEEE Transactions on Mobile Computing, 2021, 21(12): 4323–4337. doi: 10.1109/TMC.2021.3075083 [5] CHENG Nan, XU Wenchao, SHI Weisen, et al. Air-ground integrated mobile edge networks: Architecture, challenges and opportunities[J]. IEEE Communications Magazine, 2018, 56(8): 26–32. doi: 10.1109/MCOM.2018.1701092 [6] HU Qiyu, CAI Yunlong, YU Guanding, et al. Joint offloading and trajectory design for UAV-enabled mobile edge computing systems[J]. IEEE Internet of Things Journal, 2018, 6(2): 1879–1892. doi: 10.1109/JIOT.2018.2878876 [7] WU Qingqing, ZENG Yong, and ZHANG Rui. Joint trajectory and communication design for multi-UAV enabled wireless networks[J]. IEEE Transactions on Wireless Communications, 2018, 17(3): 2109–2121. doi: 10.1109/TWC.2017.2789293 [8] AL-HOURANI A, KANDEEPAN S, and LARDNER S. Optimal LAP altitude for maximum coverage[J]. IEEE Wireless Communications Letters, 2014, 3(6): 569–572. doi: 10.1109/LWC.2014.2342736 [9] 芦方旭, 米志超, 李艾静, 等. 基于灰狼算法的无人机基站三维空间优化部署[J]. 兵器装备工程学报, 2021, 42(7): 185–189. doi: 10.11809/bqzbgcxb2021.07.032LU Fangxu, MI Zhichao, LI Aijing, et al. Research on three-dimensional deployment algorithm of UAV-BS based on gray wolf optimizer[J]. Journal of Sichuan Ordnance, 2021, 42(7): 185–189. doi: 10.11809/bqzbgcxb2021.07.032 [10] 冯建新, 栾帅帅, 刘俊梅, 等. 一种高吞吐量的无人机轨迹规划方法[J]. 计算机工程, 2021, 47(1): 172–181. doi: 10.19678/j.issn.1000-3428.0056235FENG Jianxin, LUAN Shuaishuai, LIU Junmei, et al. An unmanned aerial vehicle trajectory planning method with high throughput[J]. Computer Engineering, 2021, 47(1): 172–181. doi: 10.19678/j.issn.1000-3428.0056235 [11] 张广驰, 严雨琳, 崔苗, 等. 基于强化学习的无人机基站多播通信系统的飞行路线在线优化[J]. 电子与信息学报, 2022, 44(3): 969–975. doi: 10.11999/JEIT210429ZHANG Guangchi, YAN Yulin, CUI Miao, et al. Online trajectory optimization for the UAV-enabled base station multicasting system based on reinforcement learning[J]. Journal of Electronics &Information Technology, 2022, 44(3): 969–975. doi: 10.11999/JEIT210429 [12] TANG Jie, SONG Jingru, OU Junhui, et al. Minimum throughput maximization for multi-UAV enabled WPCN: A deep reinforcement learning method[J]. IEEE Access, 2020, 8: 9124–9132. doi: 10.1109/ACCESS.2020.2964042 [13] ZENG Yong and ZHANG Rui. Energy-efficient UAV communication with trajectory optimization[J]. IEEE Transactions on Wireless Communications, 2017, 16(6): 3747–3760. doi: 10.1109/TWC.2017.2688328 -

 下载:
下载:




图(6) / 表(2)
计量
- 文章访问数: 1250
- HTML全文浏览量: 1300
- PDF下载量: 180
- 被引次数: 0
