

Low-orbit Bistatic Frequency Modulated Continuous Wave SAR Imaging Method Based on Singular Value Decomposition
-
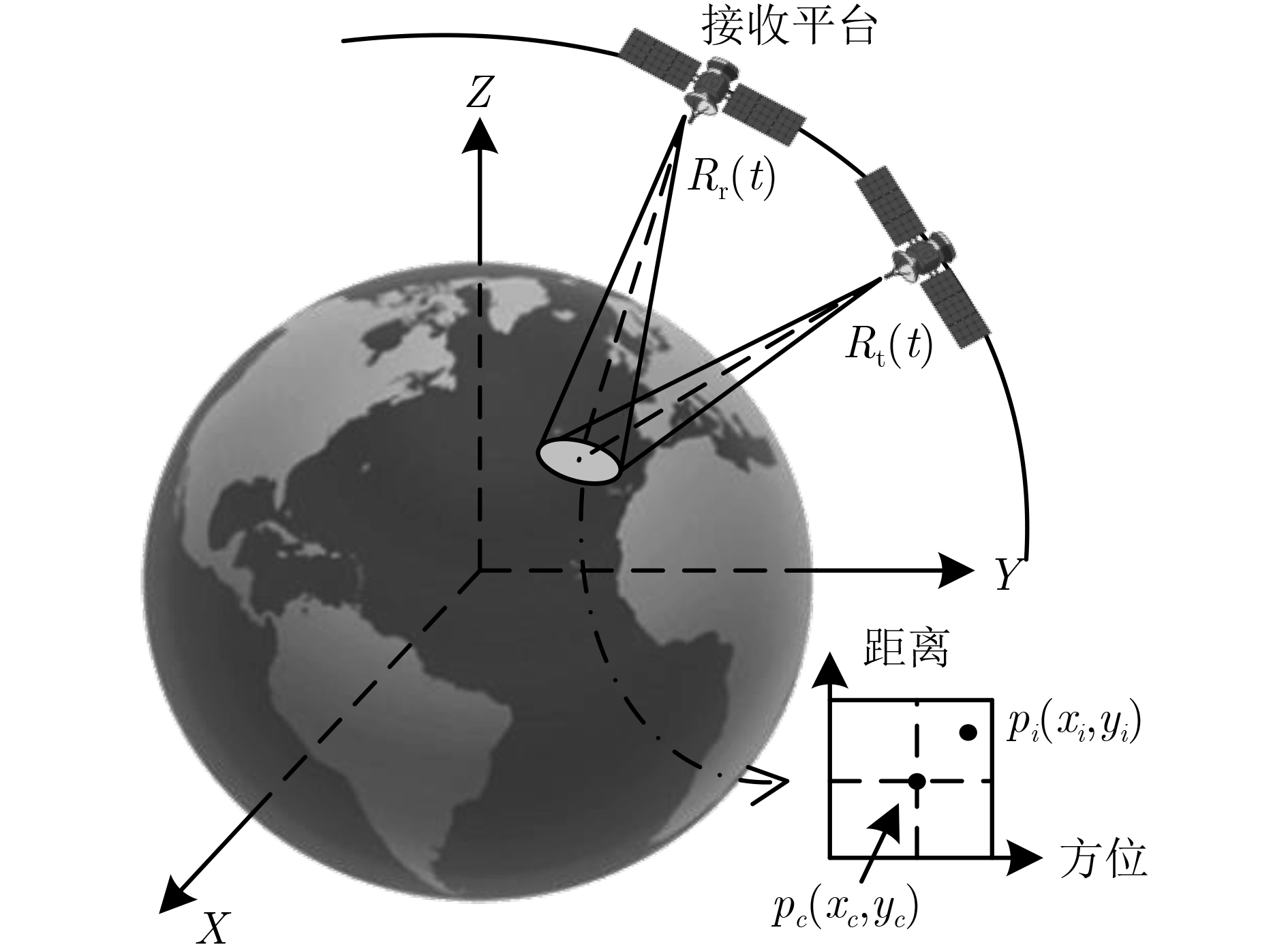
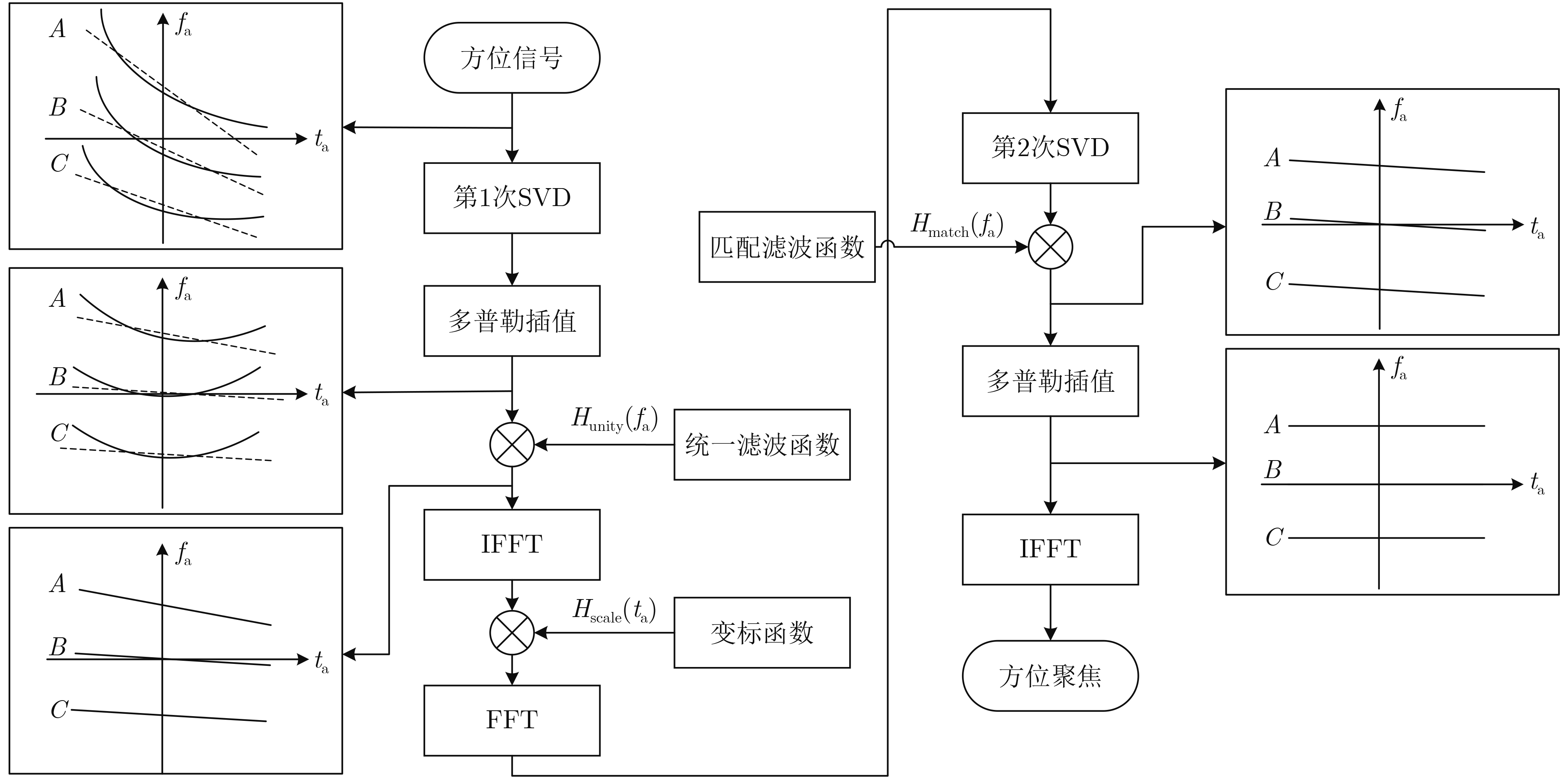
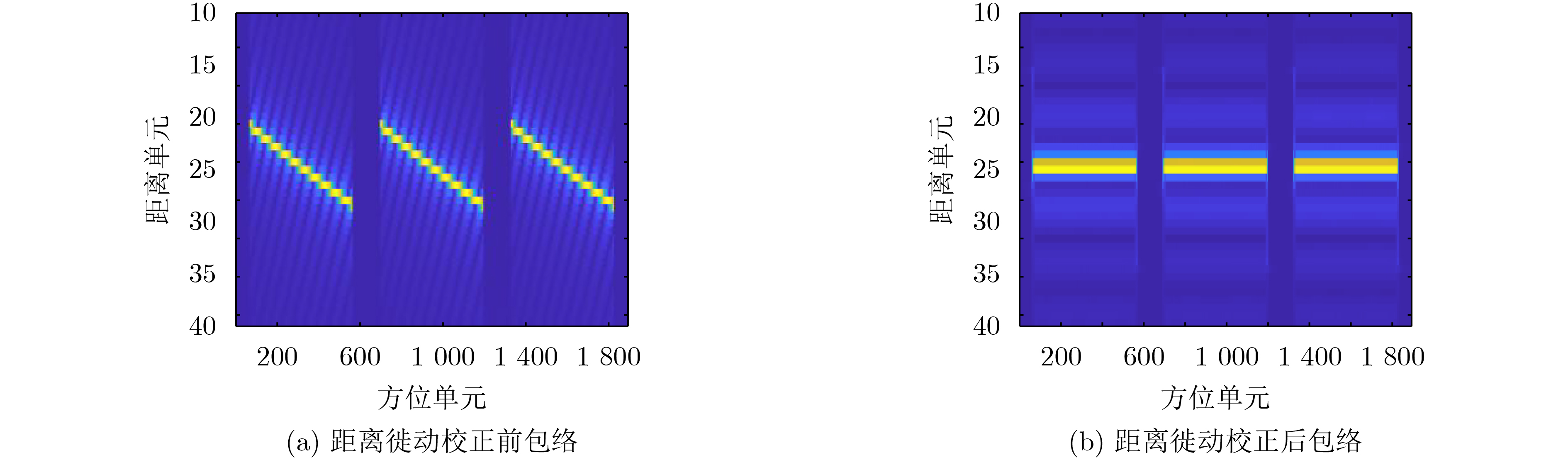
摘要: 该文基于调频连续波(FMCW)信号对低轨星载双基合成孔径雷达(SAR)的成像方法进行研究。星载双基模型具有收发异置、结构灵活的特点,其非线性运动轨迹和双斜距不利于信号频谱的推导和分析。通过引入一个4阶多项式斜距模型对回波信号进行建模,接着用级数反演法得到信号两维频谱的表达式。详细分析高阶多项式系数的空变影响。对距离徙动项进行频域处理,对方位相位采用奇异值分解(SVD)的方法,将方位空变项与多普勒分离开,并引入非线性方位变标函数,通过两次连续的插值和重采样完成方位聚焦。仿真结果证明了该算法的有效性。Abstract: The imaging method of low-orbit bistatic SAR based on Frequency Modulated Continuous Wave (FMCW) signal is studied in this paper. The spaceborne bistatic model has the feature of transceiver separation and flexible structure. The nonlinear motion trajectory and bistatic slant range history are not conducive to the derivation and analysis of signal spectrum. The signal is constructed by a fourth-order polynomial slant range model. The expression of the two-dimensional spectrum of the signal is obtained by the method of series reversion. The spatial variation effect of the high-order polynomial coefficients is analyzed in detail. The range migration term is compensated in frequency domain. The azimuth phase is processed by the Singular Value Decomposition (SVD) method. Then the azimuth spectrum is divided into Doppler focusing terms and azimuth variation terms. A nonlinear azimuth scaling function is introduced. The azimuth variation can be completely corrected by two consecutive interpolations and resampling. The validity of the proposed method is verified by the simulation experiments.
-
表 1 星载轨道及雷达仿真参数
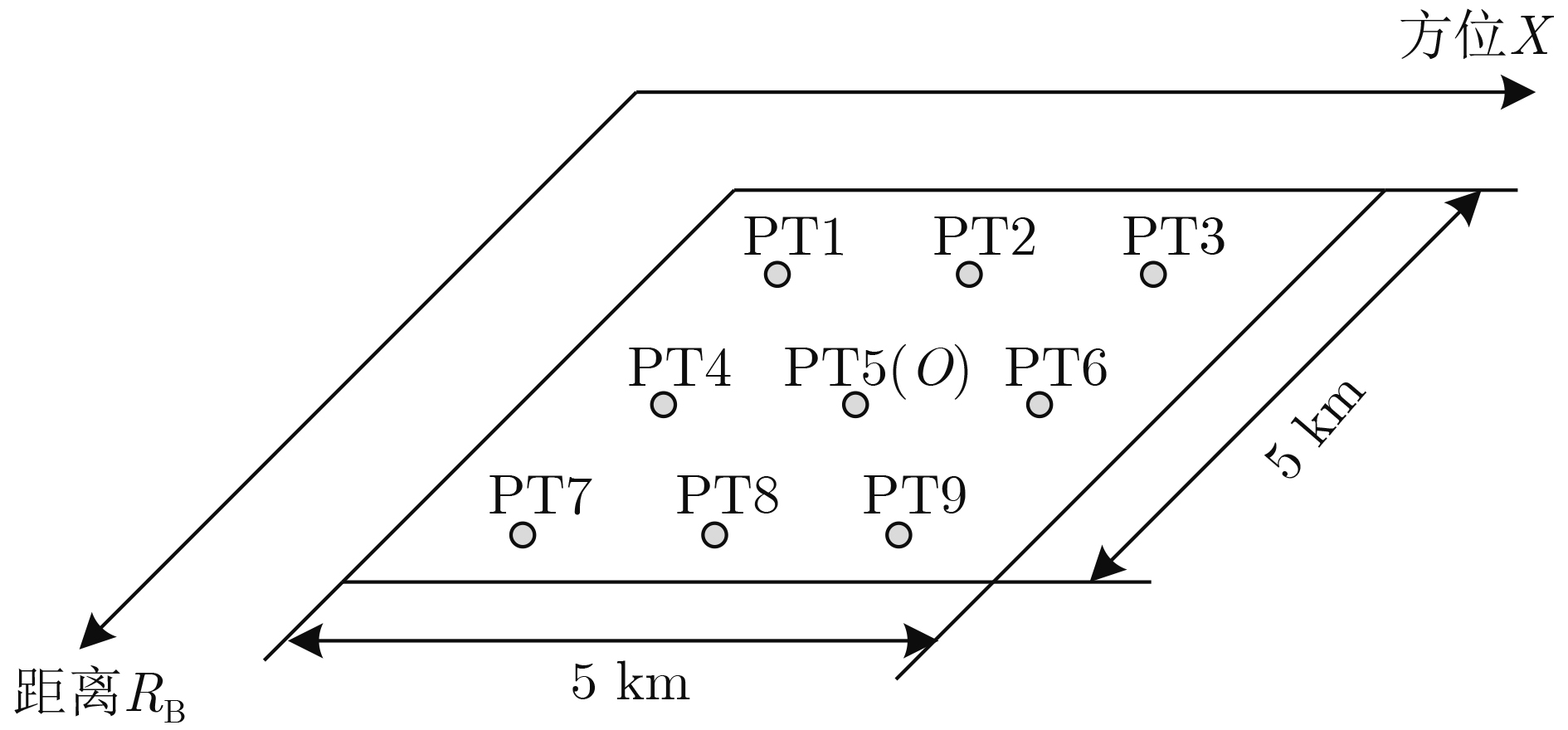
参数名称 参数值 参数名称 参数值 轨道高度 500 km 载频 35.75 GHz 离心率 0.05 信号带宽 150 MHz 下视角 31.5° 脉冲重复频率 4000 Hz 占空比 85 % 采样率 25 MHz 双星间距 10~12 km 合成孔径时间 0.5 s 场景宽度 5 km×5 km 地距分辨率 1.7 m×2.5 m  下载: 导出CSV
下载: 导出CSV
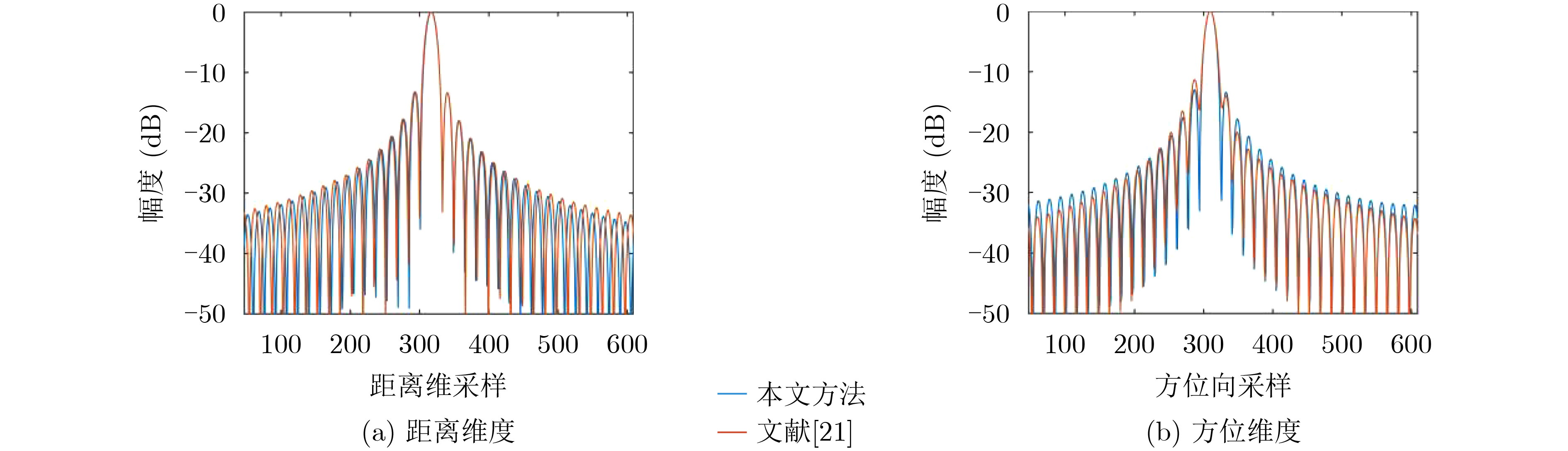
表 2 点目标聚焦性能评估(dB)
目标点 PSLR ISLR 距离 方位 距离 方位 PT1 –13.0384 –13.3730 –9.5939 –10.2401 PT4 –13.1874 –13.3809 –9.5523 –10.4050 PT5 –13.1452 –12.8488 –9.5117 –9.9738 PT6 –13.1879 –13.3270 –9.5602 –10.4058
下载: 导出CSV
-
[1] 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005: 123–182.BAO Zheng, XING Mengdao, and WANG Tong. Radar Image Technology[M]. Beijing: Publishing House of Electronics Industry, 2005: 123–182. [2] LOFFELD O, NIES H, PETERS V, et al. Models and useful relations for bistatic SAR processing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2004, 42(10): 2031–2038. doi: 10.1109/TGRS.2004.835295 [3] NEO Y L, WONG F H, and CUMMING I G. Processing of azimuth-invariant bistatic SAR data using the range Doppler algorithm[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(1): 14–21. doi: 10.1109/TGRS.2007.909090 [4] LIU Wenkang, SUN Guangcai, XING Mengdao, et al. Focusing of MEO SAR data based on principle of optimal imaging coordinate system[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(8): 5477–5489. doi: 10.1109/TGRS.2020.2966581 [5] LIU Wenkang, SUN Guangcai, XING Mengdao, et al. 2-D beam steering method for squinted high-orbit SAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(6): 4827–4840. doi: 10.1109/TGRS.2020.3015904 [6] ZHANG Yixin and FANG Lili. Imaging for bistatic airborne frequency modulated continuous wave SAR[C]. 2019 International Conference on Electronic Engineering and Informatics, Nanjing, China, 2019: 155–158. [7] BIE Bowen, QUAN Yinghui, LIU Wenkang, et al. A modified range model and doppler resampling based imaging algorithm for high squint SAR on maneuvering platforms[J]. IEEE Geoscience and Remote Sensing Letters, 2020, 17(11): 1923–1927. doi: 10.1109/LGRS.2019.2959660 [8] 李根, 马彦恒, 侯建强, 等. 基于Keystone变换和扰动重采样的机动平台大斜视SAR成像方法[J]. 电子与信息学报, 2020, 42(10): 2485–2492. doi: 10.11999/JEIT190831LI Gen, MA Yanheng, HOU Jianqiang, et al. Maneuvering platform high-squint SAR imaging method based on keystone transform and perturbation resampling[J]. Journal of Electronics &Information Technology, 2020, 42(10): 2485–2492. doi: 10.11999/JEIT190831 [9] CHEN Jianlai, SUN Guangcai, WANG Yong, et al. A TSVD-NCS algorithm in range-doppler domain for geosynchronous synthetic aperture radar[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(11): 1631–1635. doi: 10.1109/LGRS.2016.2599224 [10] LIU Yue, DENG Yunkai, WANG R, et al. Bistatic FMCW SAR signal model and imaging approach[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(3): 2017–2028. doi: 10.1109/TAES.2013.6558035 [11] 梁毅, 王虹现, 邢孟道, 等. 基于FMCW的大斜视SAR成像研究[J]. 电子与信息学报, 2009, 31(4): 776–780. doi: 10.3724/SP.J.1146.2007.01851LIANG Yi, WANG Hongxian, XING Mengdao, et al. Imaging study of high squint SAR based on FMCW[J]. Journal of Electronics &Information Technology, 2009, 31(4): 776–780. doi: 10.3724/SP.J.1146.2007.01851 [12] NEO Y L, WONG F, and CUMMING I G. A two-dimensional spectrum for bistatic SAR processing using series reversion[J]. IEEE Geoscience and Remote Sensing Letters, 2007, 4(1): 93–96. doi: 10.1109/LGRS.2006.885862 [13] 王开民. 调频连续波无人机SAR动目标成像研究[D]. [硕士论文], 电子科技大学, 2020.WANG Kaimin. Research on moving target imaging of FMCW SAR mounted on unmanned aerial vehicle[D]. [Master dissertation], University of Electronic Science and Technology, 2020. [14] BIE Bowen, QUAN Yinghui, XU Kaijie, et al. High-speed maneuvering platform SAR imaging with optimal beam steering control[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5216012. doi: 10.1109/TGRS.2021.3121427 [15] 游冬, 孙光才, 李亚超, 等. 地球同步轨道SAR两维奇异值分解成像方法[J]. 系统工程与电子技术, 2018, 40(10): 2200–2206. doi: 10.3969/j.issn.1001-506X.2018.10.07YOU Dong, SUN Guangcai, LI Yachao, et al. Two-dimension SVD imaging method for GEO SAR[J]. Systems Engineering and Electronics, 2018, 40(10): 2200–2206. doi: 10.3969/j.issn.1001-506X.2018.10.07 [16] TANG Wanru, HUANG Bang, ZHANG Shunsheng, et al. Focusing of spaceborne SAR data using the improved nonlinear chirp scaling algorithm[C]. 2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, USA, 2020: 6555–6558. [17] SUN Guangcai, CHEN Jianlai, YANG Jun, et al. A 2-D space-variant chirp scaling algorithm for GEO SAR[C]. The 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 2014: 1–4. [18] XIONG Yi, LIANG Buge, YU Hanwen, et al. Processing of bistatic SAR data with nonlinear trajectory using a controlled-SVD algorithm[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 5750–5759. doi: 10.1109/JSTARS.2021.3084619 [19] SUN Guangcai, XING Mengdao, WANG Yong, et al. A 2-D space-variant chirp scaling algorithm based on the RCM equalization and subband synthesis to process geosynchronous SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 4868–4880. doi: 10.1109/TGRS.2013.2285721 [20] FENG Lipeng, WANG Hui, ZHENG Shichao, et al. Spaceborne bistatic FMCW SAR imaging method based on FS algorithm[C]. The 2021 2nd China International SAR Symposium, Shanghai, China, 2021: 1–5. [21] MEI Haiwen, LI Yachao, XING Mengdao, et al. A frequency-domain imaging algorithm for translational variant bistatic forward-looking SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(3): 1502–1515. doi: 10.1109/TGRS.2019.2943743 -

 下载:
下载:






图(10) / 表(2)
计量
- 文章访问数: 766
- HTML全文浏览量: 501
- PDF下载量: 82
- 被引次数: 0
