

A Particle Filter Method Based on Harris Hawks Optimization Improved by Encircling Strategy
-
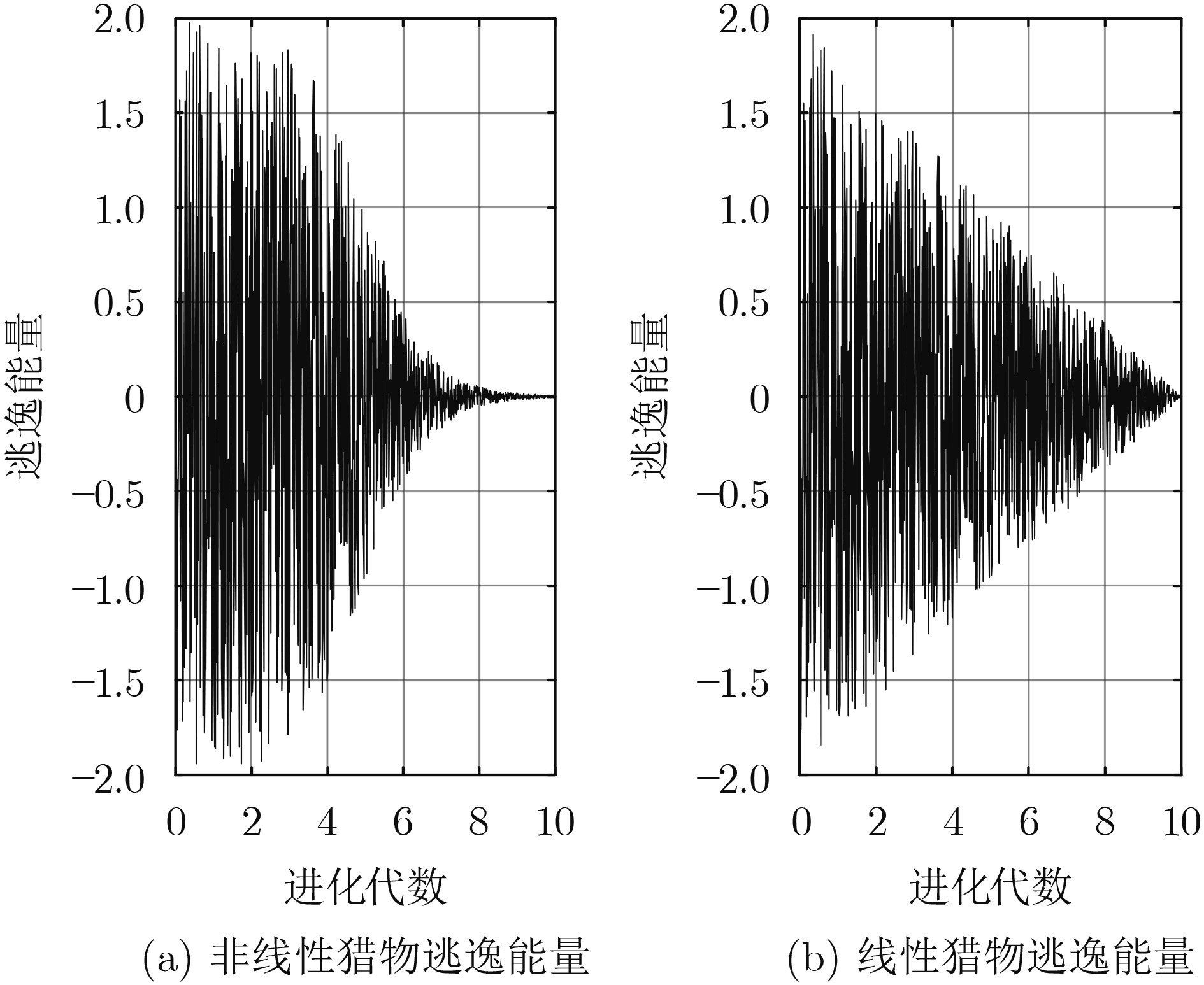
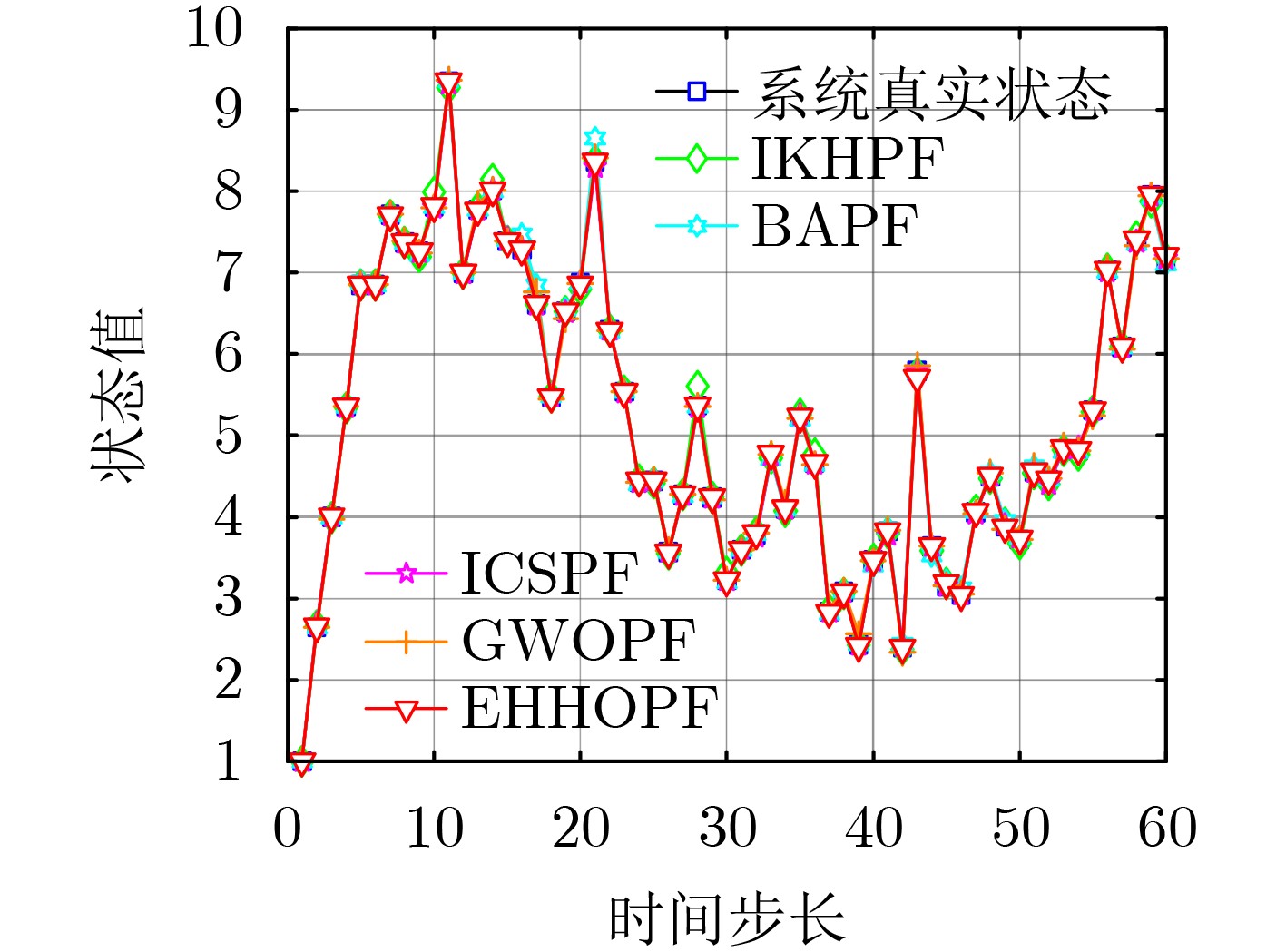
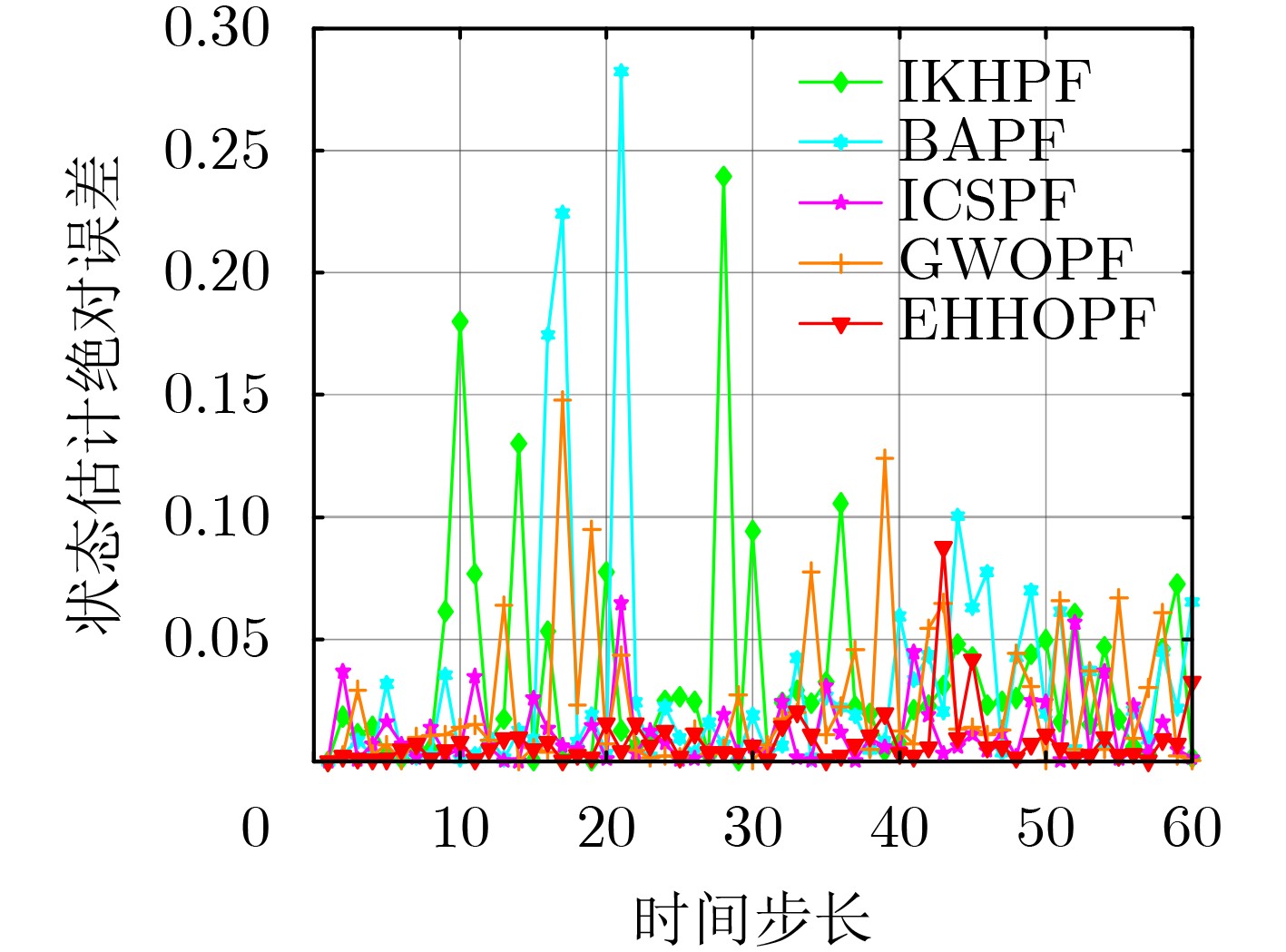
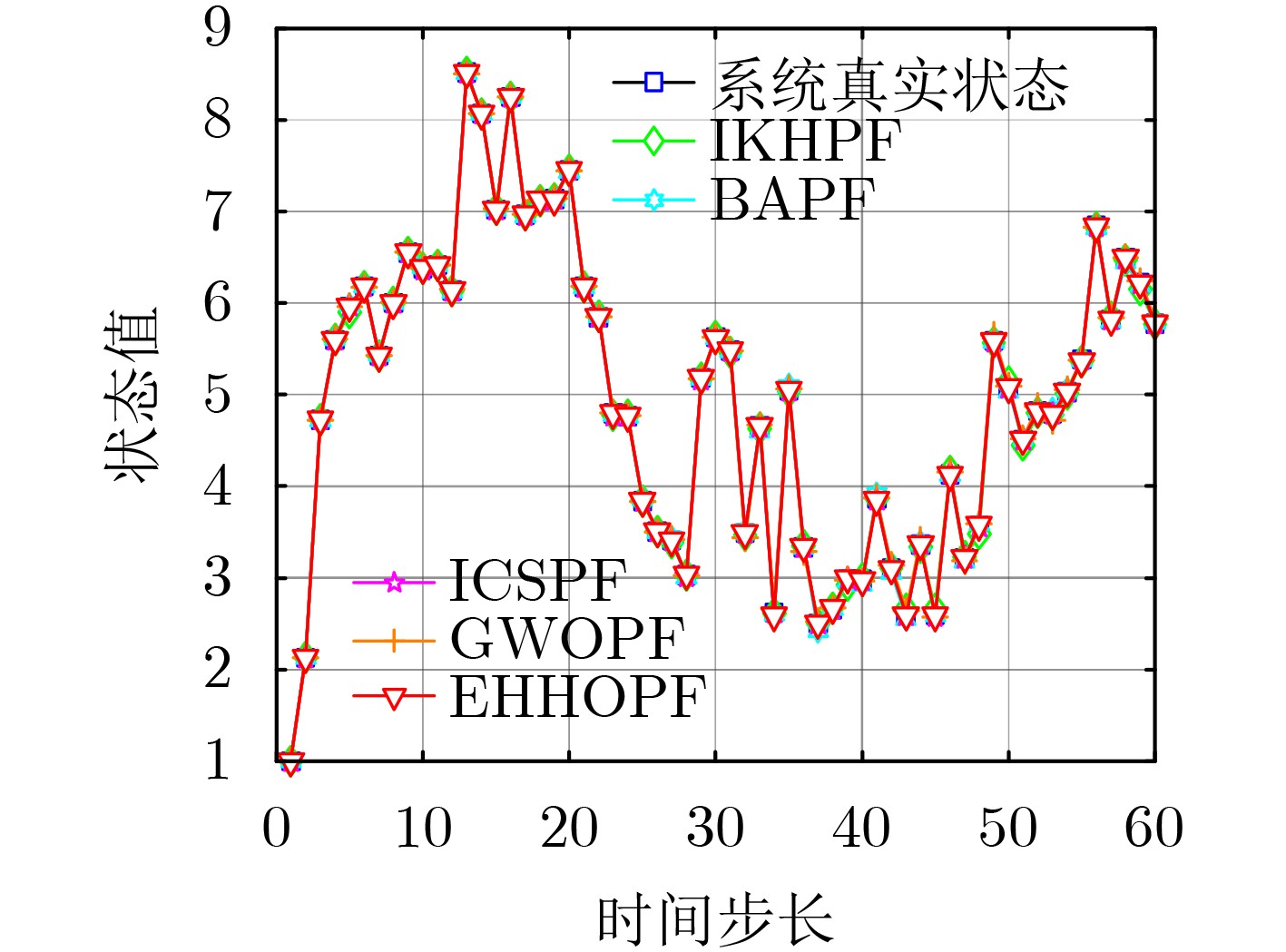
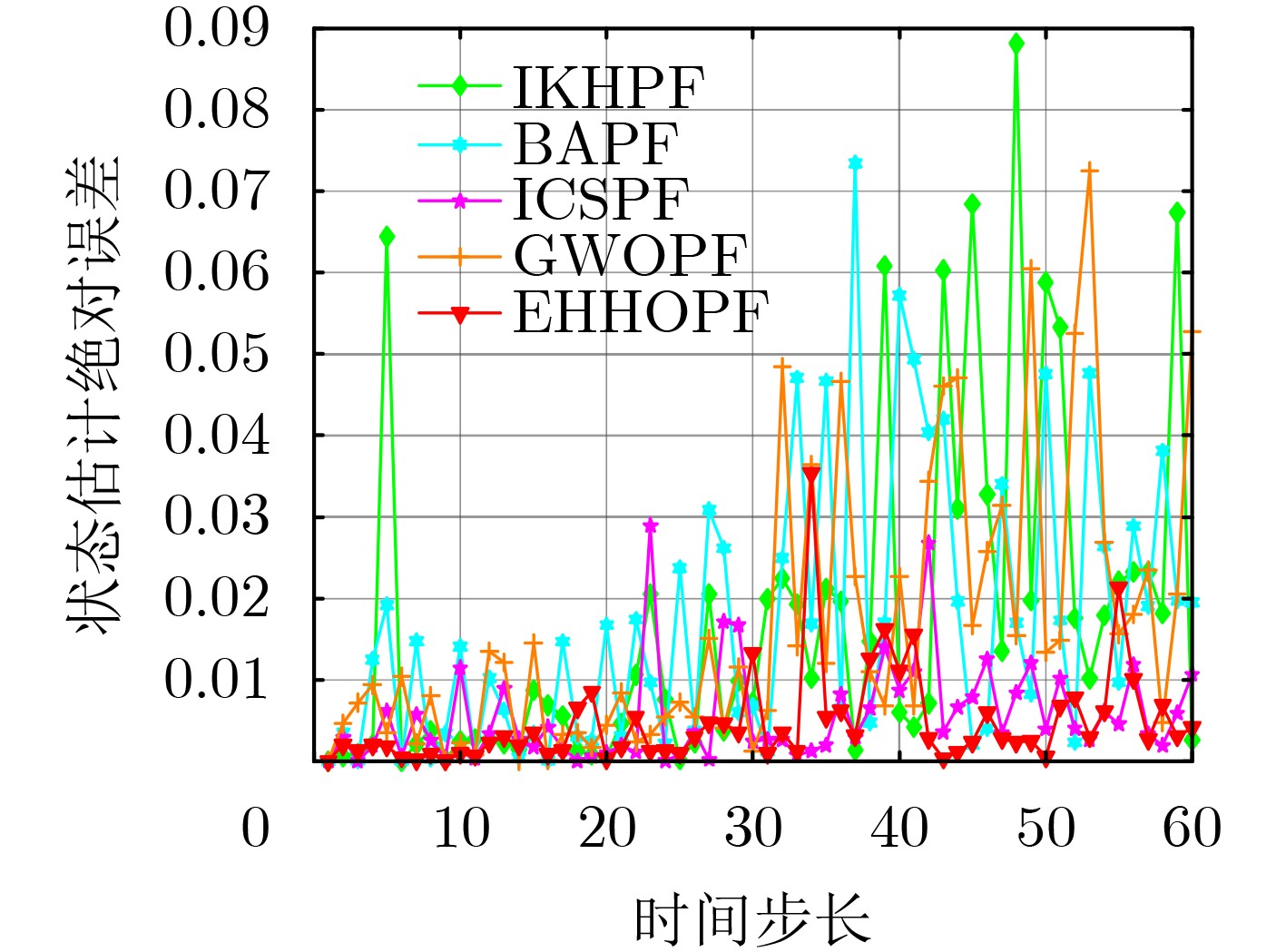
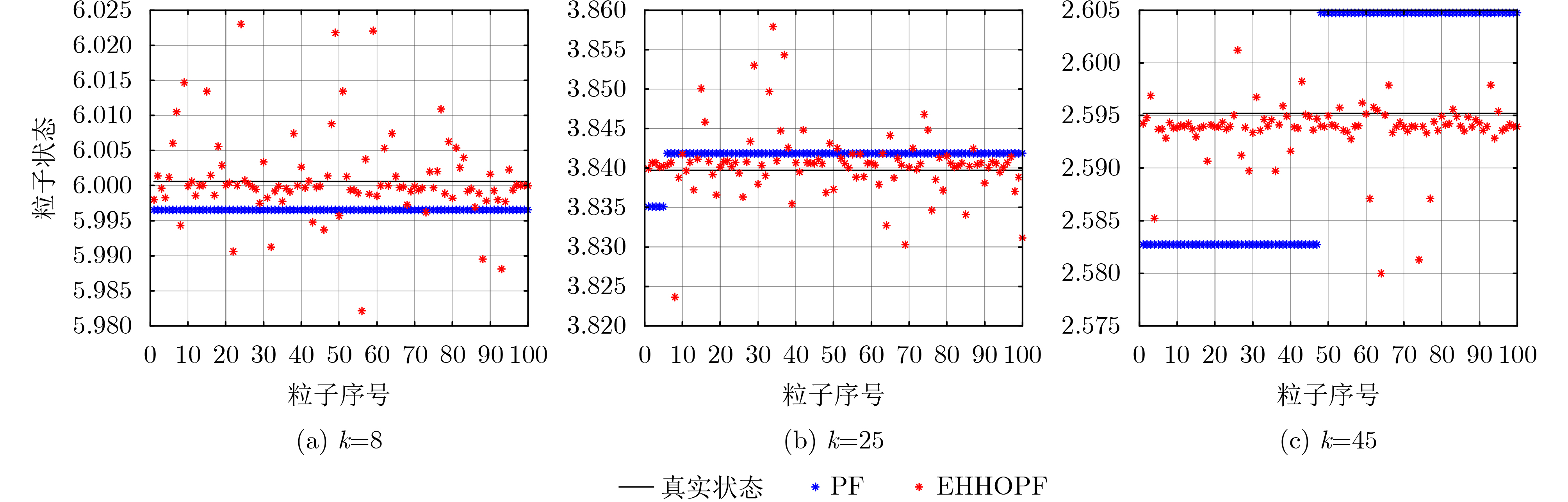
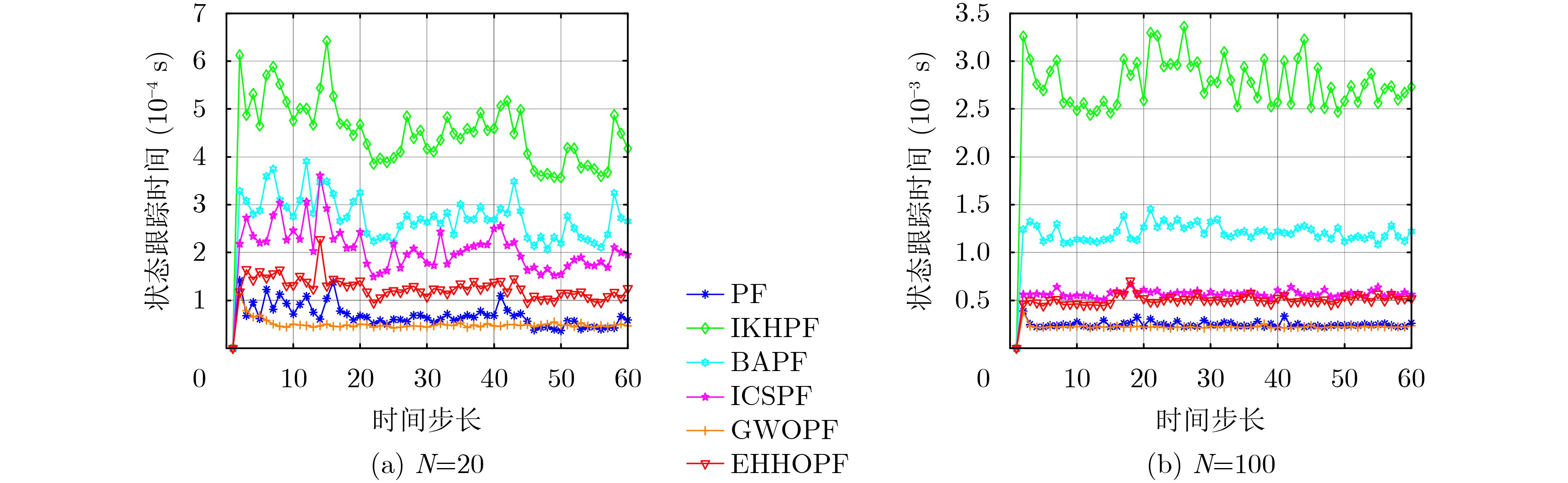
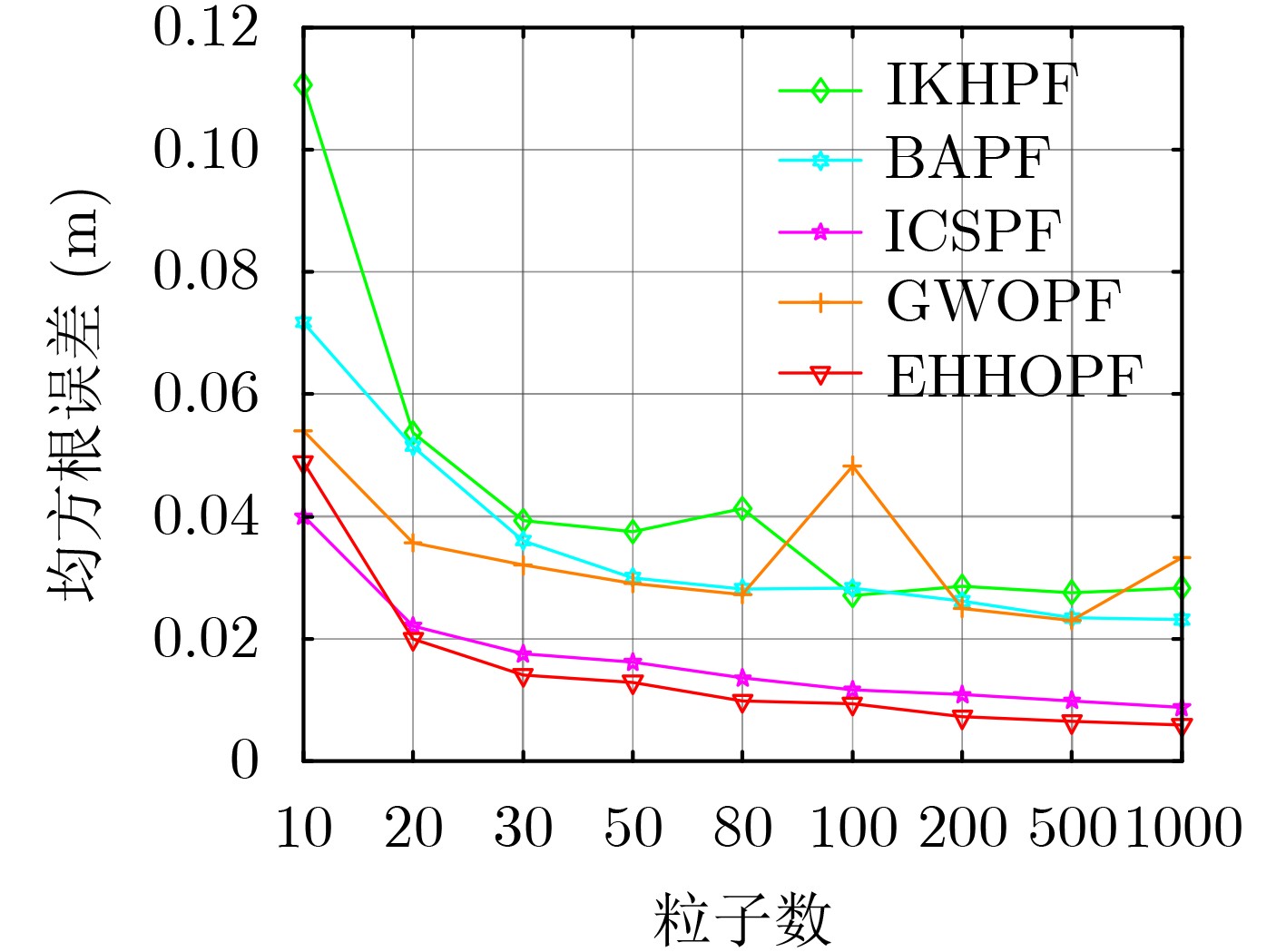
摘要: 针对标准粒子滤波过程的权值退化和样本贫化问题,该文结合融入围猎策略的哈里斯鹰优化算法设计一种群智能优化粒子滤波方法(EHHOPF)。首先,引入围猎策略替代哈里斯鹰优化算法全局搜索策略以适配粒子滤波环境;其次,采用Sigmoid函数构建非线性猎物逃逸能量平衡算法的探索阶段和开发阶段;最后构建选择比例因子融合开发阶段捕猎策略并采用非线性猎物跳跃强度保证算法收敛效率。仿真结果表明,与标准粒子滤波以及磷虾算法、蝙蝠算法、布谷鸟算法、灰狼算法优化的粒子滤波方法相比,基于围猎改进哈里斯鹰优化的粒子滤波方法有效提升了系统状态估计精度、滤波稳定性和滤波实时性。Abstract: To deal with the weight degradation and sample impoverishment problems of particle filter, a Particle Filter based on Harris Hawks Optimization improved by Encircling strategy (EHHOPF) is designed. Firstly, the global search strategy in Harris Hawks Optimization is replaced by an encircling prey strategy to fit the filtering environment. Additionally, Sigmoid function is introduced to construct the nonlinear prey escaping energy to achieve the balance between exploration and exploitation. Lastly, the selection scale factor is proposed to simplify the selection mechanism of searching strategies and nonlinear dynamic prey jump strength is constructed to guarantee the convergence efficiency as well. The simulation results exhibited that the proposed particle filter can effectively improve the state estimation accuracy, filtering stability and real-time performance than the standard particle filter and particle filters optimized by krill herd algorithm, bat algorithm, cuckoo search algorithm and grey wolf optimizer.
-
Key words:
- Particle filter /
- Harris hawks optimization /
- Weight degradation /
- Sample impoverishment
-
表 1 群智能优化滤波方法参数设置
滤波方法 ${w_1}$ ${w_2}$ $ {N^{\max }} $ $ {V_f} $ $ {D^{\max }} $ $\alpha $ $\gamma $ ${f_{\min }}$ ${f_{\max }}$ ${p_a}$ IKHPF 0.2 0.6 0.08 1.2 0.01 – – – – – BAPF – – – – – 0.5 0.5 0 2 – ICSPF – – – – – – – – – 0.75  下载: 导出CSV
下载: 导出CSV
表 2 不同粒子滤波算法仿真结果比较
滤波方法 RMSEmean RMSEvar Tmean(s) 20 50 100 20 50 100 20 50 100 PF 0.7863 0.6188 0.5231 0.0373 0.0419 0.0261 2.71E-03 6.23E-03 0.0113 IKHPF 0.0691 0.0371 0.0357 2.36E-03 1.17E-03 9.54E-04 0.0214 0.0582 0.1319 BAPF 0.0430 0.0313 0.0286 1.24E-04 3.19E-05 8.38E-06 0.0134 0.0329 0.0633 ICSPF 0.0225 0.0138 0.0112 1.82E-04 3.04E-05 9.86E-06 9.79E-03 0.0181 0.0310 GWOPF 0.0508 0.0295 0.0264 5.57E-03 1.22E-05 7.05E-06 3.06E-03 7.33E-03 0.0141 EHHOPF 0.0193 0.0116 9.02E-03 7.11E-05 6.91E-06 3.45E-06 6.04E-03 0.0148 0.0271
下载: 导出CSV
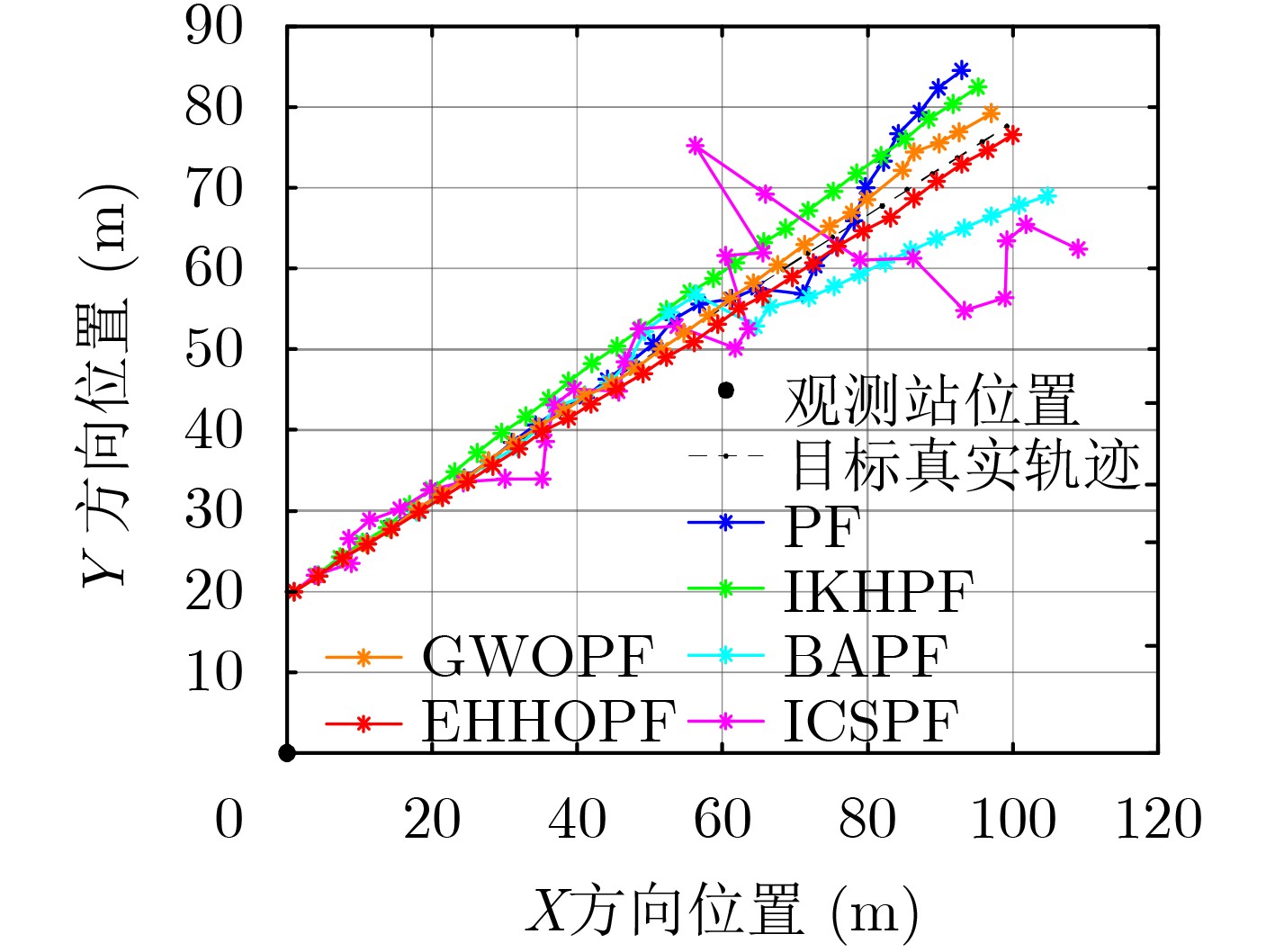
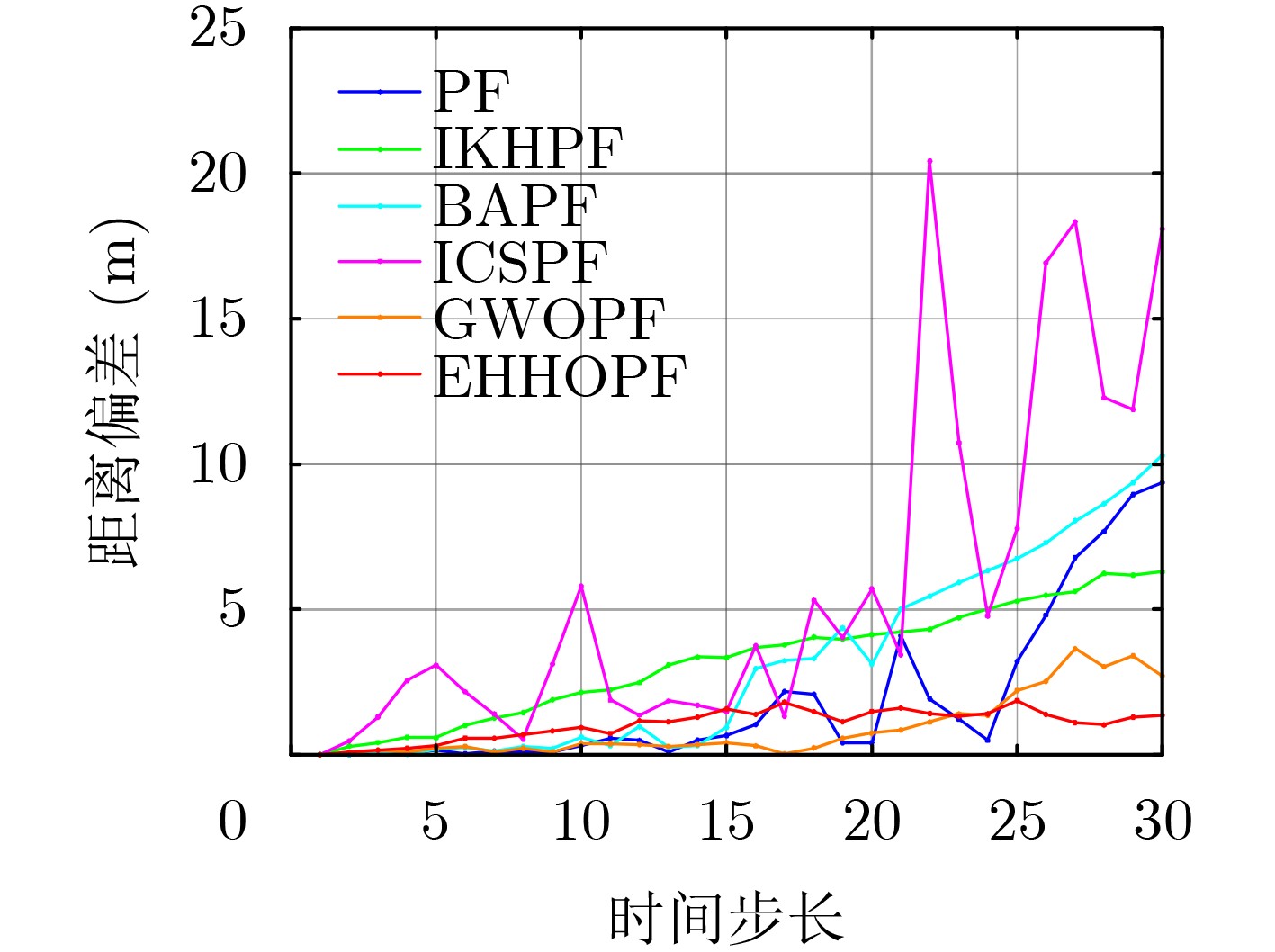
表 3 不同滤波算法目标跟踪结果(m)
滤波方法 RMSEmean RMSEvar SGAD MAD Px Vx Py Vy Px Vx Py Vy 均值 方差 均值 方差 PF 10.0260 0.6644 11.8082 0.8561 17.0158 0.0621 24.5250 0.1248 58.4830 1036.36 1.9494 1.1515 IKHPF 4.9863 0.6188 5.2403 0.5968 11.4143 0.1528 12.4253 0.0804 35.6843 600.255 1.1895 0.6669 BAPF 14.8241 1.2136 17.3307 1.4562 39.7658 0.1654 51.4222 0.3707 72.6756 1718.71 2.4225 1.9097 ICSPF 40.4398 0.1106 63.5023 0.2041 277.389 4.36E-04 1301.48 5.41E-04 261.777 13191.3 8.7259 14.657 GWOPF 4.5594 0.1912 5.0885 0.2513 4.4170 0.0119 6.0523 0.0238 28.4354 196.586 0.9478 0.2184 EHHOPF 4.4762 0.2249 4.9962 0.2871 3.0997 8.00E-03 4.2422 0.0148 27.9863 144.975 0.9329 0.1611
下载: 导出CSV
-
[1] BAO Zhichao, JIANG Qiuxi, and LIU Fangzheng. Multiple model efficient particle filter based track-before-detect for maneuvering weak targets[J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 647–656. doi: 10.23919/JSEE.2020.000040 [2] 杨峰, 张婉莹. 一种多模型贝努利粒子滤波机动目标跟踪算法[J]. 电子与信息学报, 2017, 39(3): 634–639. doi: 10.11999/JEIT160467YANG Feng and ZHANG Wanying. Multiple model Bernoulli particle filter for maneuvering target tracking[J]. Journal of Electronics &Information Technology, 2017, 39(3): 634–639. doi: 10.11999/JEIT160467 [3] ROWE D, RIUS I, GONZÀLEZ J, et al. Robust particle filtering for object tracking[C]. 13th International Conference on Image Analysis and Processing, Cagliari, Italy, 2005: 1158–1165. [4] YIN Shen and ZHU Xiangping. Intelligent particle filter and its application to fault detection of nonlinear system[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3852–3861. doi: 10.1109/TIE.2015.2399396 [5] 焦自权, 范兴明, 张鑫, 等. 基于改进粒子滤波算法的锂离子电池状态跟踪与剩余使用寿命预测方法[J]. 电工技术学报, 2020, 35(18): 3979–3993. doi: 10.19595/j.cnki.1000-6753.tces.190750JIAO Ziquan, FAN Xingming, ZHANG Xin, et al. State tracking and remaining useful life predictive method of Li-ion battery based on improved particle filter algorithm[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3979–3993. doi: 10.19595/j.cnki.1000-6753.tces.190750 [6] 黄卫华, 何佳乐, 陈阳, 等. 基于灰色模型和改进粒子滤波的无人机视觉/INS导航算法[J]. 中国惯性技术学报, 2021, 29(4): 459–466. doi: 10.13695/j.cnki.12-1222/o3.2021.04.006HUANG Weihua, HE Jiale, CHEN Yang, et al. UAV vision/INS navigation algorithm based on grey model and improved particle filter[J]. Journal of Chinese Inertial Technology, 2021, 29(4): 459–466. doi: 10.13695/j.cnki.12-1222/o3.2021.04.006 [7] GORDON N J, SALMOND D J, and SMITH A F M. Novel approach to nonlinear/non-Gaussian Bayesian state estimation[J]. IEEE Proceedings F (Radar and Signal Processing), 1993, 140(2): 107–113. doi: 10.1049/ip-f-2.1993.0015 [8] LI Tiancheng, SUN Shudong, SATTAR T P, et al. Fight sample degeneracy and impoverishment in particle filters: A review of intelligent approaches[J]. Expert Systems with Applications, 2014, 41(8): 3944–3954. doi: 10.1016/j.eswa.2013.12.031 [9] AHWIADI M and WANG W. An adaptive particle filter technique for system state estimation and prognosis[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(9): 6756–6765. doi: 10.1109/TIM.2020.2973850 [10] 刘海涛, 林艳明, 陈永华, 等. 基于遗传算法的智能粒子滤波重采样策略研究[J]. 电子与信息学报, 2021, 43(12): 3459–3466. doi: 10.11999/JEIT200561LIU Haitao, LIN Yanming, CHEN Yonghua, et al. A study on resampling strategy of intelligent particle filter based on genetic algorithm[J]. Journal of Electronics &Information Technology, 2021, 43(12): 3459–3466. doi: 10.11999/JEIT200561 [11] 刘润邦, 朱志宇. 万有引力优化的粒子滤波算法[J]. 西安电子科技大学学报:自然科学版, 2018, 45(2): 141–147. doi: 10.3969/j.issn.1001-2400.2018.02.024LIU Runbang and ZHU Zhiyu. Gravity optimized particle filter algorithm[J]. Journal of Xidian University, 2018, 45(2): 141–147. doi: 10.3969/j.issn.1001-2400.2018.02.024 [12] 王尔申, 庞涛, 曲萍萍, 等. 基于混沌的改进粒子群优化粒子滤波算法[J]. 北京航空航天大学学报, 2016, 42(5): 885–890. doi: 10.13700/j.bh.1001-5965.2015.0670WANG Ershen, PANG Tao, QU Pingping, et al. Improved particle filter algorithm based on chaos particle swarm optimization[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(5): 885–890. doi: 10.13700/j.bh.1001-5965.2015.0670 [13] 田梦楚, 薄煜明, 陈志敏, 等. 萤火虫算法智能优化粒子滤波[J]. 自动化学报, 2016, 42(1): 89–97. doi: 10.16383/j.aas.2016.c150221TIAN Mengchu, BO Yuming, CHEN Zhimin, et al. Firefly algorithm intelligence optimized particle filter[J]. Acta Automatica Sinica, 2016, 42(1): 89–97. doi: 10.16383/j.aas.2016.c150221 [14] HEIDARI A A, MIRJALILI S, FARIS H, et al. Harris hawks optimization: Algorithm and applications[J]. Future Generation Computer Systems, 2019, 97: 849–872. doi: 10.1016/j.future.2019.02.028 [15] ZHANG Yang, ZHOU Xizhao, and SHIH P C. Modified Harris hawks optimization algorithm for global optimization problems[J]. Arabian Journal for Science and Engineering, 2020, 45(12): 10949–10974. doi: 10.1007/s13369-020-04896-7 [16] ZHANG Xiaoqing, ZHANG Yuye, and MING Zhengfeng. Improved dynamic grey wolf optimizer[J]. Frontiers of Information Technology & Electronic Engineering, 2021, 22(6): 877–890. doi: 10.1631/FITEE.2000191 [17] MAO W L, SUPRAPTO, and HUNG C W. Type-2 fuzzy neural network using grey wolf optimizer learning algorithm for nonlinear system identification[J]. Microsystem Technologies, 2018, 24(10): 4075–4088. doi: 10.1007/s00542-017-3636-x [18] 朱震曙, 蒋长辉, 薄煜明, 等. 磷虾群优化的改进粒子滤波算法[J]. 哈尔滨工业大学学报, 2020, 52(2): 186–192. doi: 10.11918/201903219ZHU Zhenshu, JIANG Changhui, BO Yuming, et al. Improved particle filter algorithm optimized by krill herd[J]. Journal of Harbin Institute of Technology, 2020, 52(2): 186–192. doi: 10.11918/201903219 [19] 陈志敏, 田梦楚, 吴盘龙, 等. 基于蝙蝠算法的粒子滤波法研究[J]. 物理学报, 2017, 66(5): 050502. doi: 10.7498/aps.66.050502CHEN Zhimin, TIAN Mengchu, WU Panlong, et al. Intelligent particle filter based on bat algorithm[J]. Acta Physica Sinica, 2017, 66(5): 050502. doi: 10.7498/aps.66.050502 [20] 黄辰, 费继友, 王丽颖, 等. 基于多策略差分布谷鸟算法的粒子滤波方法[J]. 农业机械学报, 2018, 49(4): 265–272. doi: 10.6041/j.issn.1000-1298.2018.04.030HUANG Chen, FEI Jiyou, WANG Liying, et al. Particle filter method based on multi-strategy difference cuckoo search algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(4): 265–272. doi: 10.6041/j.issn.1000-1298.2018.04.030 -



图(10) / 表(3)
计量
- 文章访问数: 1047
- HTML全文浏览量: 533
- PDF下载量: 117
- 被引次数: 0
 下载:
下载:
