

Detection of Small Targets on Sea Surface Based on 3-D Concave Hull Learning Algorithm
-
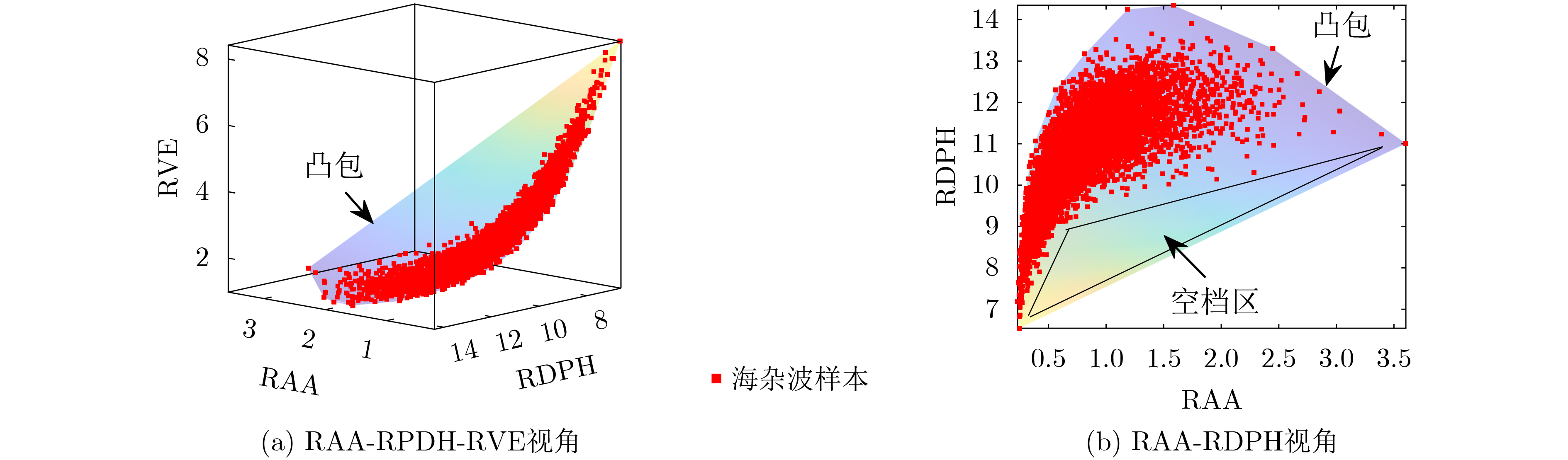
摘要: 对于特征类的海面小目标检测方法,现有3特征检测器通常采用凸包分类算法完成检测。在实际应用时发现,该分类算法生成的判决区域在某些情况下不能很好地反映海杂波样本集合在特征空间中的分布情况,进而对检测器性能造成一定程度的损失。相比之下,使用凹包算法生成的判决区域是由凸包内剖得到的,它能更加贴合海杂波样本的分布,因此该文将判决区域的形式由凸包转化为凹包,并在此基础之上提出一种基于3维凹包学习算法的海面小目标检测方法。同时,针对现有3维凹包算法存在的内剖效率低、无法实现恒虚警检测的缺点,该文通过优化内剖点选择方法、增加“外补”环节的方式对算法进行改进。最后,经实测CSIR数据及X波段试验雷达数据共同验证,在其他参数均相同时,该文方法的检测性能要优于已有的多特征检测方法,并且通过对凹包算法的复杂度分析证明了所提方法的应用潜力。Abstract: For radar maritime target detection method of feature class, the convex hull classification algorithm is usually used in existing three feature detectors to complete detection. It is found that the decision region generated by convex hull learning algorithm may not well reflect the distribution of sea clutter samples in feature space in actual application, which may cause a certain degree of performance loss. By contrast, the decision region generated by concave hull algorithm is dug from convex hull, which can fit the distribution of sea clutter samples better. Therefore, in this paper, the form of the decision region is transformed from convex hull to concave hull. On this basis, a small target detection method based on 3-D concave hull learning algorithm is proposed. However, the existing 3-D concave hull algorithm has the disadvantages of low efficiency and unable to realize constant false alarm detection. To solve this problem, this paper improves the algorithm by optimizing the selection method of digging point and adding a process named "external complement". Finally, the measured CSIR datasets and X-band experimental radar data verify that the performance of proposed detection methods is superior to existing detection methods when other parameters are the same. At the same time, the analysis of algorithm complexity proves the application potential of proposed method.
-
Key words:
- Target detection /
- Sea clutter /
- Anomaly detection /
- Feature-based detection /
- Concave hull
-
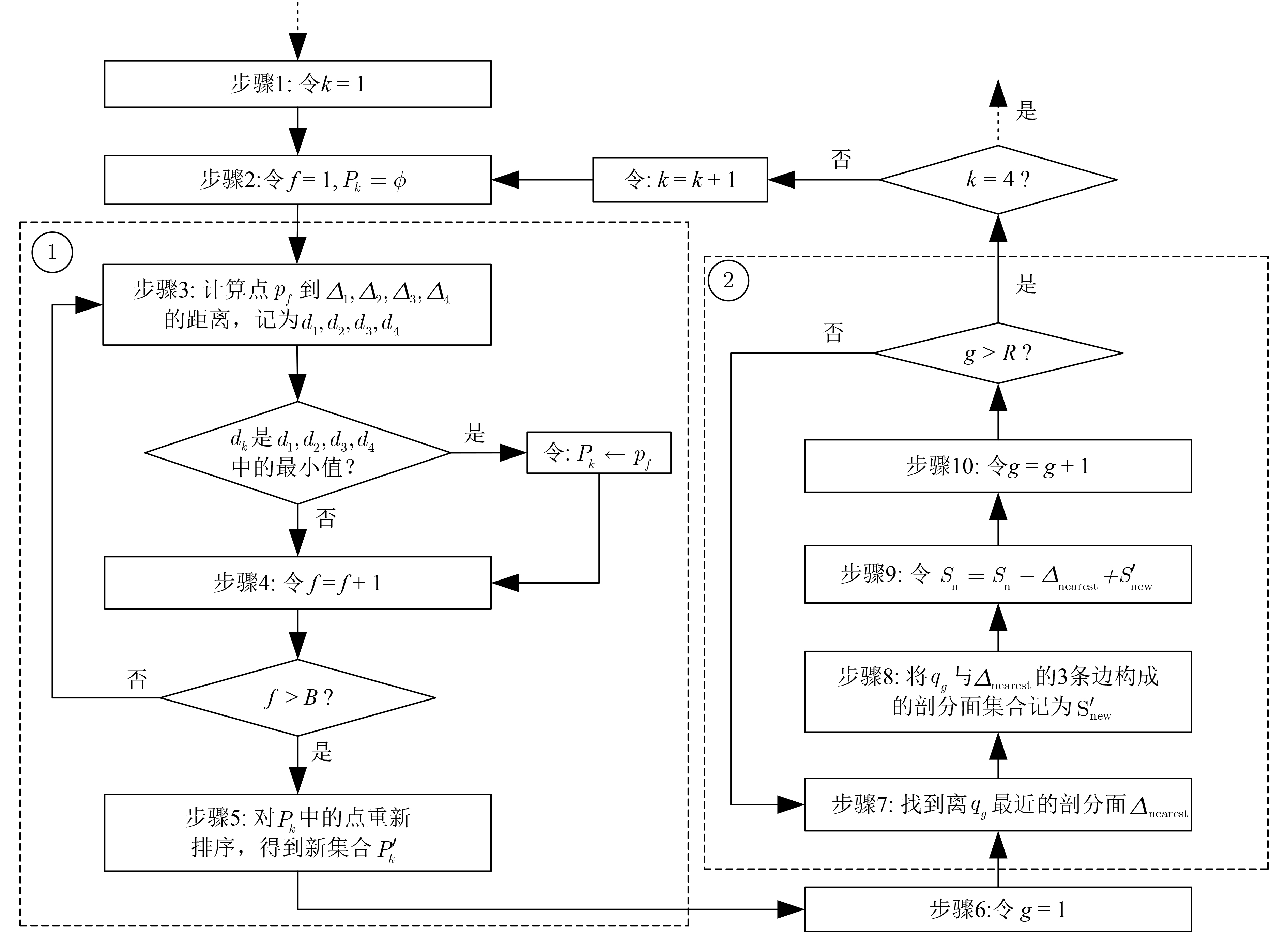
算法1 文献[11]的凹包生成算法 输入: 海杂波样本集${{S} }$,最大迭代次数$ {\text{max\_iteration}} $ 输出: 凹包$ {S_{{\text{concave}}}} $ (1) 初始化:令$ V = 0 $($ V $代表迭代次数) (2) 利用现有的凸包算法生成$ S $的原始凸包${S_{\rm{n}}}$ (3) 计算${S_{\rm{n}}}$表面所有剖分面的周长(周长值构成的集合用符号$ {L_V} $表示),得到门限值$ {\text{threshold = mean}}({L_0}) $,$\text{mean}(\cdot)$为平均算子 (4) 若周长最大值小于$ {\text{threshold}} $,跳出循环,否则执行: (5) 令:$ V = V + 1 $ (6) 若$ V > {\text{max\_iteration}} $,跳出循环,否则继续执行: (7) 对${S_{\rm{n}}}$执行内剖,并更新${S_{\rm{n}}}$ (8) 计算$ {S_n} $表面所有剖分面的周长($ {L_V} $实现迭代更新) (9) 转至步骤6 (10) 返回: ${ {{S} }_{ {\text{concave} } } } = { {{S} }_{\text{n} } }$  下载: 导出CSV
下载: 导出CSV
表 1 CSIR数据集介绍
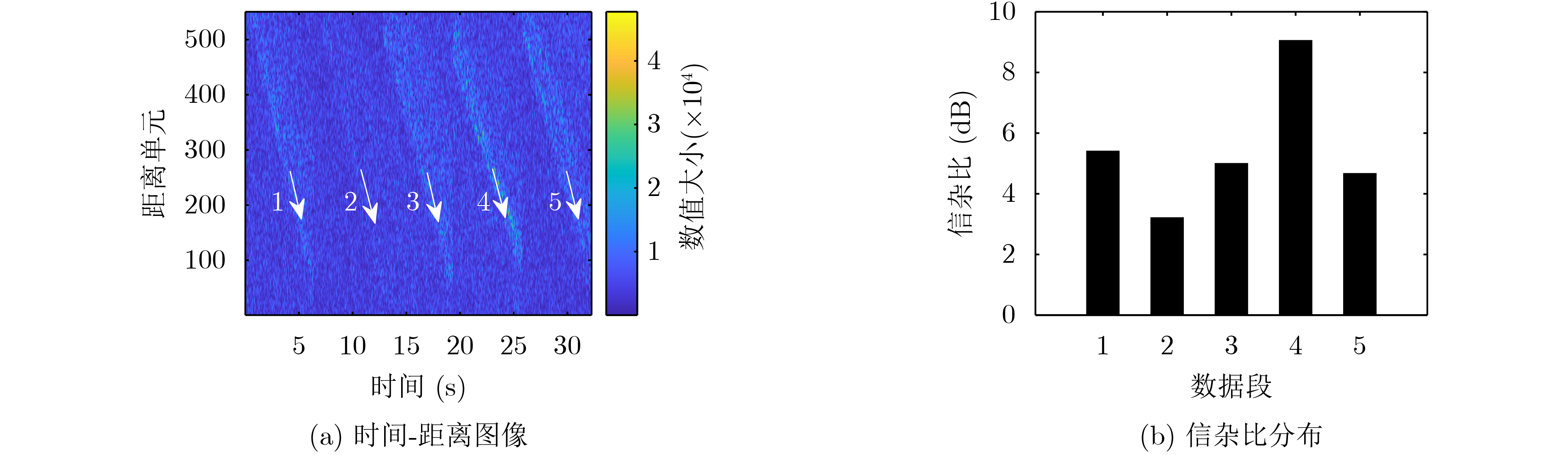
编号 数据集名称 平均风速(m/s) 有效波高(m) 目标所在距离单元 原始信杂比(dB) 脉冲重复频率 (kHz) 1 'TFA17_007' 5.44 2.26 24 11.56 5 2 'TFA17_010' 5.47 2.27 23-24 6.29 5 3 'TFA17_012' 6.12 2.30 14-18 7.31 5 4 'TFA17_013' 6.13 2.30 18-21 7.80 5 5 'TFA17_014' 6.26 2.35 17-22 1.35 5 6 'TFC17_004' 6.10 2.28 11-12 13.47 5 7 'TFC17_006' 6.28 2.35 22-25 8.04 5 8 'TFA10_008' 1.49 1.84 16-17 13.78 2.5 9 'TFC15_039' 7.43 3.20 21-26 –1.79 5
下载: 导出CSV
表 2 训练时间对比(使用的特征是RAA-RDPH-RVE)(s)
编号 相干脉冲数为512时 相干脉冲数为1024时 现有方法 本文方法 本文方法(改进后) 现有方法 本文方法 本文方法(改进后) 1 0.031 0.727 0.470 0.031 0.629 0.669 2 0.090 1.337 1.208 0.094 1.380 1.268 3 0.074 1.027 0.882 0.076 1.095 0.970 4 0.074 1.020 0.936 0.074 1.032 1.074 5 0.141 1.621 1.726 0.143 1.690 2.399 6 0.089 1.188 0.974 0.094 1.218 1.018 7 0.172 1.934 2.028 0.182 1.929 2.060 8 0.049 0.875 1.927 0.050 0.794 1.505 9 0.014 0.392 0.579 0.015 0.380 0.579
下载: 导出CSV
表 3 检测时间对比(使用的特征是RAA-RDPH-RVE)(ms)
编号 相干脉冲数为512时 相干脉冲数为1024时 现有方法 本文方法 本文方法(改进后) 现有方法 本文方法 本文方法(改进后) 1 2.022 3.273 3.606 0.892 1.868 1.932 2 5.993 6.680 7.484 3.003 3.333 3.523 3 4.492 5.102 5.214 2.151 2.460 2.329 4 4.444 5.103 5.182 2.066 2.574 2.362 5 8.231 8.772 8.597 3.671 4.277 4.171 6 5.622 6.183 5.898 2.585 3.370 3.386 7 10.328 10.723 10.564 4.646 5.188 5.343 8 2.851 3.602 3.044 1.335 2.413 2.348 9 0.931 2.427 2.540 0.421 1.850 1.904
下载: 导出CSV
-
[1] 关键. 雷达海上目标特性综述[J]. 雷达学报, 2020, 9(4): 674–683. doi: 10.12000/JR20114GUAN Jian. Summary of marine radar target characteristics[J]. Journal of Radars, 2020, 9(4): 674–683. doi: 10.12000/JR20114 [2] 关键, 伍僖杰, 丁昊, 等. 基于对角积分双谱的海面慢速小目标检测方法[J]. 电子与信息学报, 2022, 44(7): 2449–2460. doi: 10.11999/JEIT210408GUAN Jian, WU Xijie, DING Hao, et al. A method for detecting small slow targets in sea surface based on diagonal integrated bispectrum[J]. Journal of Electronics &Information Technology, 2022, 44(7): 2449–2460. doi: 10.11999/JEIT210408 [3] 时艳玲, 姚婷婷, 郭亚星. 基于图连通密度的海面漂浮小目标检测[J]. 电子与信息学报, 2021, 43(11): 3185–3192.SHI Yanling, YAO Tingting, and GUO Yaxing. Floating small target detection based on graph connected density in sea surface[J] Journal of Electronics & Information Technology, 2021, 43(11): 3185–3192. [4] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/TAES.2014.120657 [5] SHI Sainan and SHUI Penglang. Sea-surface floating small target detection by one-class classifier in time-frequency feature space[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(11): 6395–6411. doi: 10.1109/TGRS.2018.2838260 [6] BAI Xiaohui, XU Shuwen, GUO Zixun, et al. Sea surface floating target detection based on local-distance measurement[C]. The 2021 IEEE 6th International Conference on Signal and Image Processing, Nanjing, China, 2021: 118–122. [7] 许述文, 茹宏涛. 基于标签传播算法的海面漂浮小目标检测方法[J]. 电子与信息学报, 2022, 44(6): 2119–2126. doi: 10.11999/JEIT210382XU Shuwen and RU Hongtao. Small target detection on sea surface based on label propagation algorithm[J]. Journal of Electronics &Information Technology, 2022, 44(6): 2119–2126. doi: 10.11999/JEIT210382 [8] 郭子薰, 水鹏朗, 白晓惠, 等. 海杂波中基于可控虚警K近邻的海面小目标检测[J]. 雷达学报, 2020, 9(4): 654–663. doi: 10.12000/JR20055GUO Zixun, SHUI Penglang, BAI Xiaohui, et al. Sea-surface small target detection based on K-NN with controlled false alarm rate in sea clutter[J]. Journal of Radars, 2020, 9(4): 654–663. doi: 10.12000/JR20055 [9] GUO Zixun and SHUI Penglang. Anomaly based sea-surface small target detection using K-nearest neighbor classification[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(6): 4947–4964. doi: 10.1109/TAES.2020.3011868 [10] ASAEEDI S, DIDEHVAR F, and MOHADES A. α-Concave hull, a generalization of convex hull[J]. Theoretical Computer Science, 2017, 702: 48–59. doi: 10.1016/j.tcs.2017.08.014 [11] LI Peng and NIGGEMANN O. Improving clustering based anomaly detection with concave hull: An application in fault diagnosis of wind turbines[C]. The 2016 IEEE 14th International Conference on Industrial Informatics, Poitiers, France, 2016: 463–466. [12] HARTIGAN J A. Estimation of a convex density contour in two dimensions[J]. Journal of the American Statistical Association, 1987, 82(397): 267–270. doi: 10.2307/2289162 [13] HERSELMAN P L, BAKER C J, and DE WIND H J. An analysis of X-Band calibrated sea clutter and small boat reflectivity at medium-to-low grazing angles[J]. International Journal of Navigation and Observation, 2008, 2008: 347518. doi: 10.1155/2008/347518 [14] HERSELMAN P L and BAKER C J. Analysis of calibrated sea clutter and boat reflectivity data at C- and X-band in South African coastal waters[C]. 2007 IET International Conference on Radar Systems, Edinburgh, UK, 2007: 1–5. [15] 刘宁波, 丁昊, 黄勇, 等. X波段雷达对海探测试验与数据获取年度进展[J]. 雷达学报, 2021, 10(1): 173–182. doi: 10.12000/JR21011LIU Ningbo, DING Hao, HUANG Yong, et al. Annual progress of the sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2021, 10(1): 173–182. doi: 10.12000/JR21011 [16] 刘宁波, 董云龙, 王国庆, 等. X波段雷达对海探测试验与数据获取[J]. 雷达学报, 2019, 8(5): 656–667. doi: 10.12000/JR19089LIU Ningbo, DONG Yunlong, WANG Guoqing, et al. Sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2019, 8(5): 656–667. doi: 10.12000/JR19089 -

 下载:
下载:







图(9) / 表(4)
计量
- 文章访问数: 1442
- HTML全文浏览量: 823
- PDF下载量: 167
- 被引次数: 0
