

Improved Particle Swarm Optimization Unmanned Aerial Vehicle-assisted Network Deployment Optimization Algorithm Based on Beetle Antennae Search
-
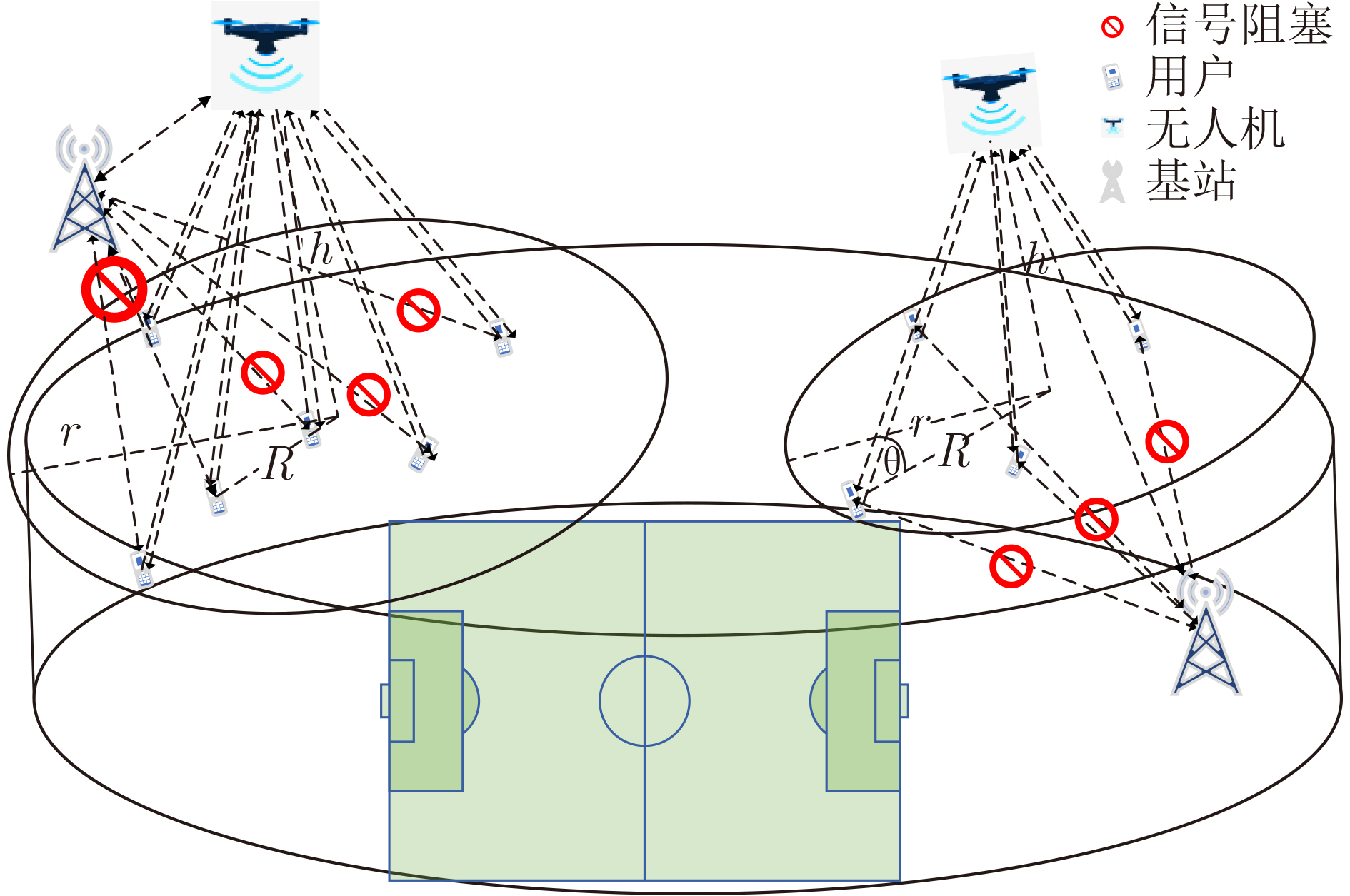
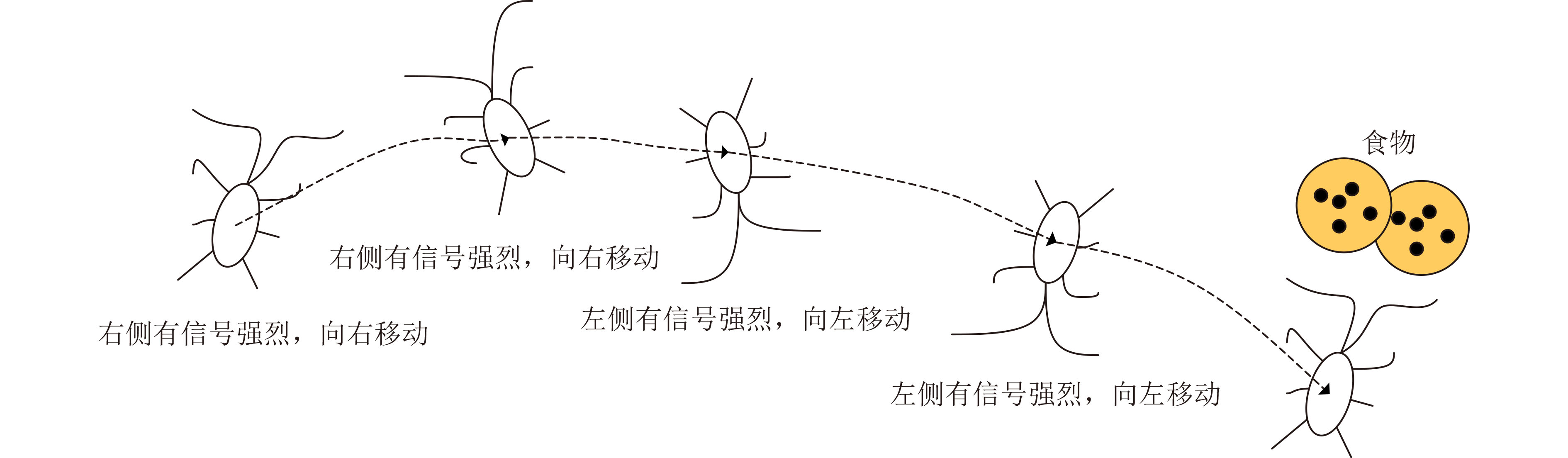
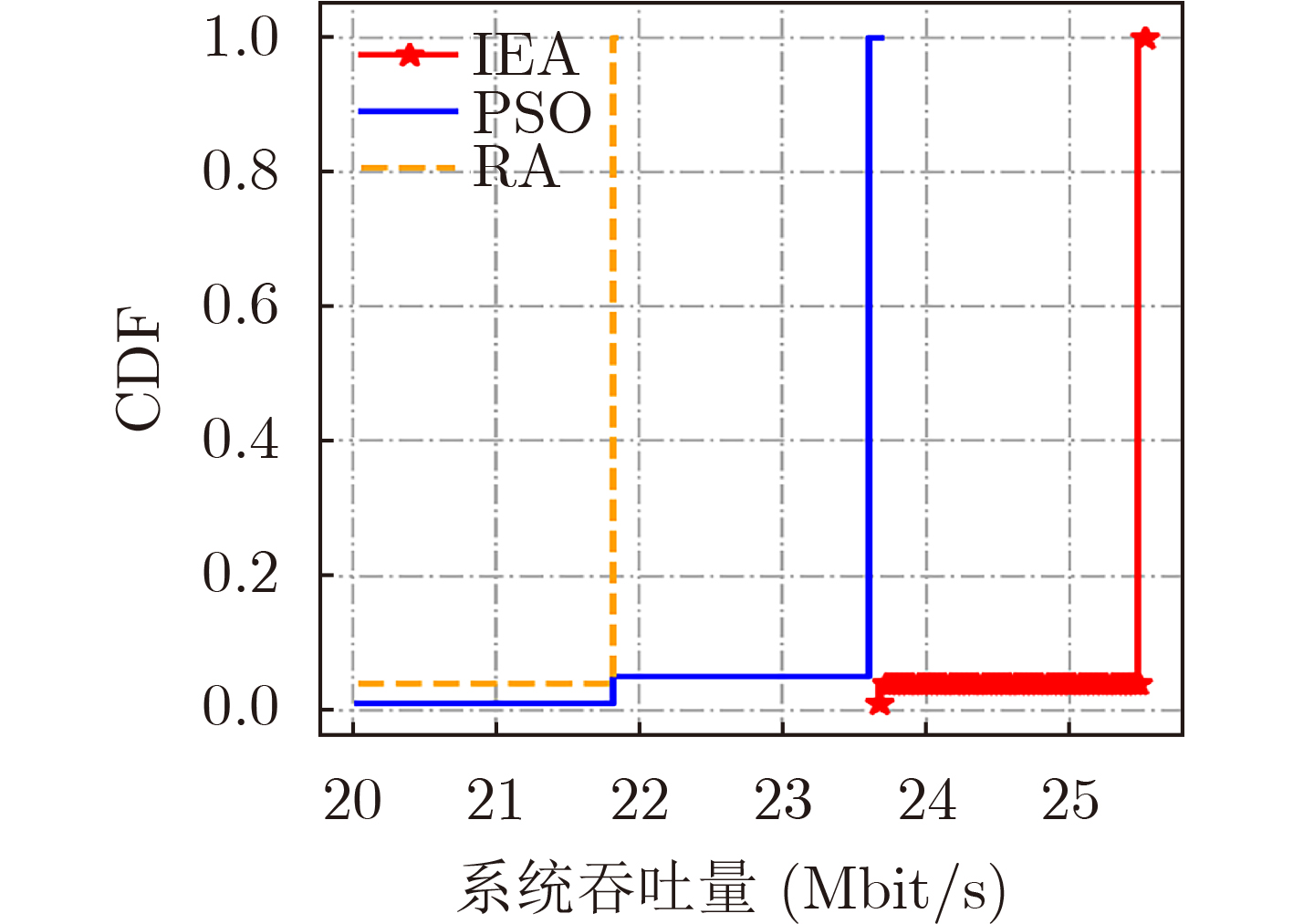
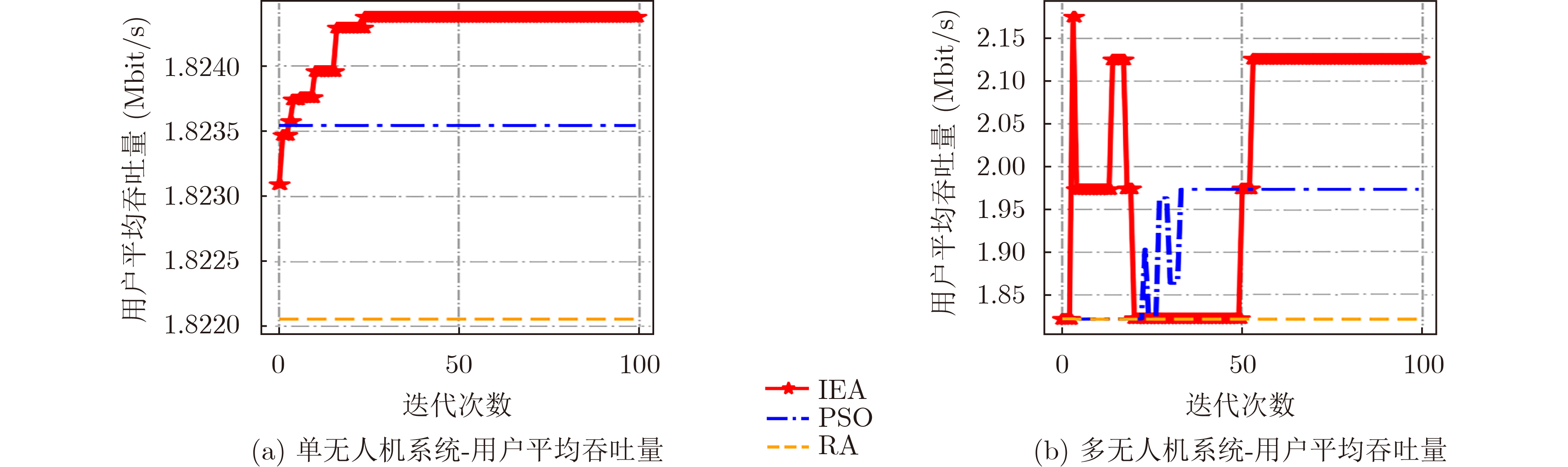
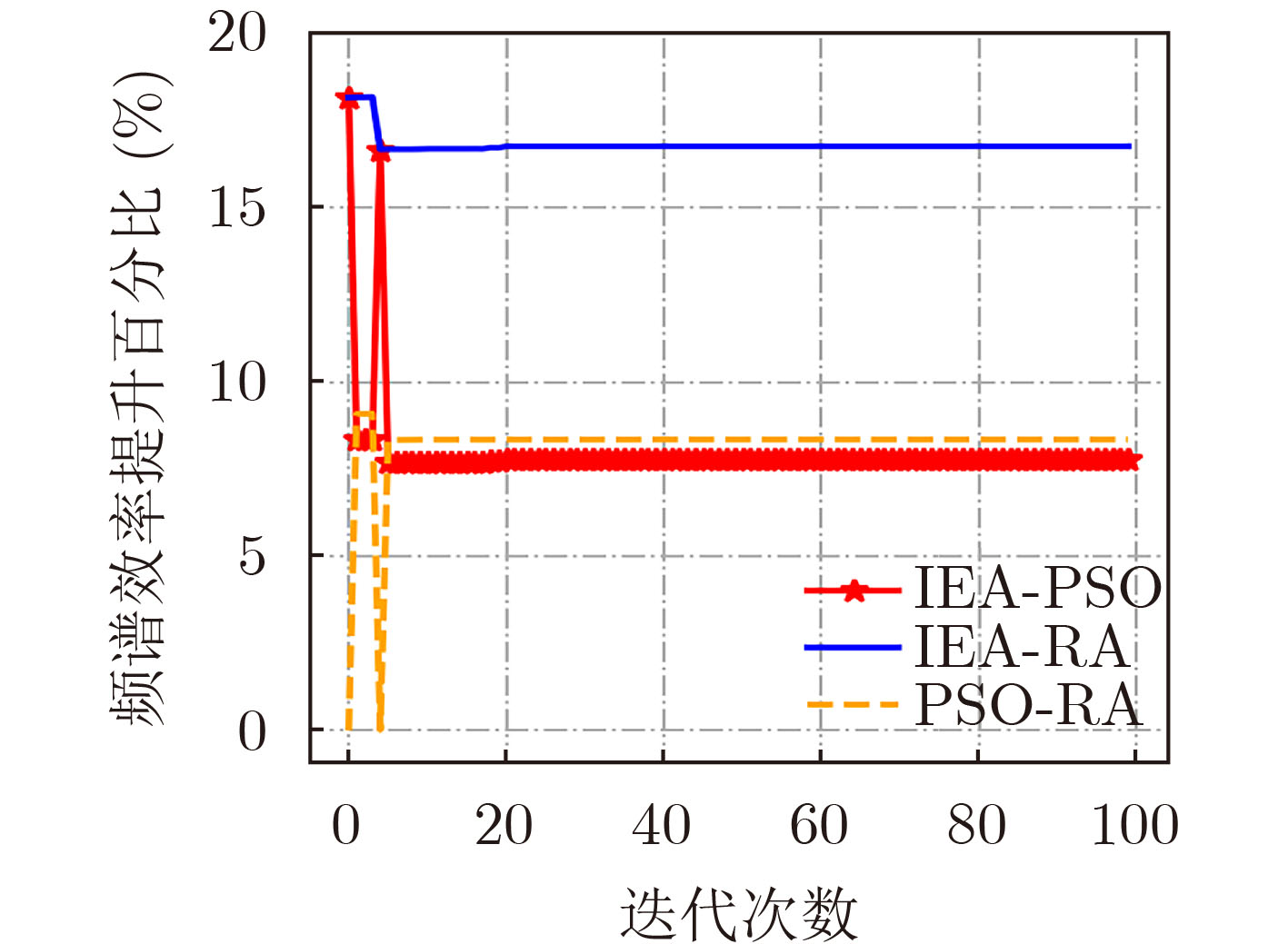
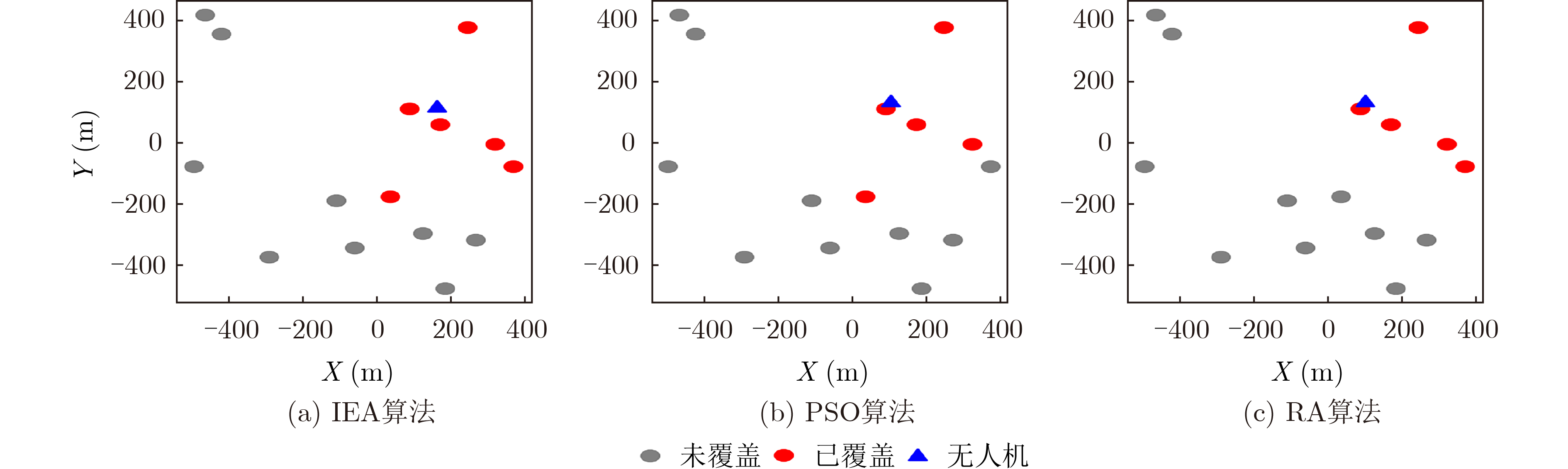
摘要: 在体育赛场等用户大规模聚集或者突发灾难的情况下,地面基站经常面临过载甚至瘫痪的问题。此时,多无人机(UAV)辅助网络系统可以很好地为地面基站提供信号补偿,有效地增强局部地区的通信质量。然而,无人机的机动性和网络流动引起的拓扑结构变化,会导致频繁的间歇性连接甚至出现传输故障。因此,UAV基站的有效部署以及网络性能的优化成为亟待解决的问题。该文提出一种基于甲虫搜索的改进粒子群UAV辅助网络部署优化算法—智能高效算法(IEA),利用甲虫搜索算法(BAS)的个体寻优优势,对粒子群算法(PSO)进行改进,并首次采用双门限约束保证用户通信质量,使得多UAV系统下的网络性能得到了改善。仿真结果表明,相对于传统算法,该文提出的IEA算法在系统吞吐量、用户平均吞吐量以及频谱效率等方面都获得了较大提升。Abstract: In the case of large gathering of users such as sports venues or sudden disasters, the ground base stations often face the problem of overloading or even paralysing. In this case, the multi-Unmanned Aerial Vehicle (UAV) auxiliary network system can provide the signal compensation for ground base stations and enhance effectively the communication quality in local areas. However, the topology changes induced by the mobility of UAV and the network flows, will lead to frequent intermittent connections or even transmission failures. Therefore, the efficient deployment of UAV base stations, as well as the optimization of network performance, become urgent issues. In this paper, an improved Particle Swarm Optimization (PSO) UAV assisted network deployment optimization algorithm based on the Beetle Antennae Search (BAS), the Intelligent and Efficient Algorithm (IEA), is proposed to improve PSO algorithm by using the individual seeking advantages of BAS algorithm. And for the first time, the double threshold constraint is applied to ensure the communication quality of users, which makes the network performance under the multi-UAV system improved. The simulation results show that, compared with the traditional algorithms, the IEA algorithm proposed in this paper achieves an obvious improvement in terms of the system throughput, the user’s average throughput as well as the spectral efficiency.
-
算法1 IEA算法 (1) 在允许范围内随机初始化${{\rm{UAV}}_j}$的位置$t_j^u$和速度 $v_j^u$ (2) 令迭代$u = 1$ (3) DO (4) For ${{\rm{UAV}}_j}$ (5) 计算适应度函数值 (6) If适应度函数值比$p_{{\rm{sbest}}}^u$大 (7) 设置当前的适应度函数值为$p_{{\rm{sbest}}}^u$ (8) 结束如果 (9) 结束循环 (10) 选择UAV的最优适应度函数值$p_{{\rm{gbest}}}^u$ (11) For ${{\rm{UAV}}_j}$ (12) For每个维度$k$ (13) 根据如下公式计算速度 (14) $v_j^{u + 1} = \omega v_j^u + {c_1}{r_1}\left( {p_{{\rm{sbest}}}^u - t_j^i} \right)$
$+ {c_2}{r_2}\left( {p_{{\rm{gbest}}}^u - t_j^u} \right)$(15) 根据公式更新的${{\rm{UAV}}_j}$位置 (16) ${t_{ {\rm{right} } } } = t_j^u + v_j^u \times {\bf{dir} } \times l$ (17) ${t_{ {\rm{left} } } } = x_j^u - v_j^u \times {\bf{dir} } \times l$ (18) $t_j^{u + 1} = t_j^u + \left( {1 - \lambda } \right) \times {\rm{step} } \times {\bf{dir} } \times {\rm{sign} }$
$\left( {f\left( {t_{\rm{r}}^u} \right) - f\left( {t_{\rm{l}}^u} \right)} \right) \times v_j^u+ \lambda \times v_j^u$(19) 结束循环 (20) 结束循环 (21) $u = u + 1$ (22) 迭代完毕,结束循环  下载: 导出CSV
下载: 导出CSV
表 1 仿真参数
参数 符号 设定值 环境参数1 $a$ 9.61 环境参数2 $b$ 0.16 波长(m/s) $c$ 300 000 000 载波频率(MHz) ${f_c}$ 2 000 GU的数量(个) $ N $ 5~15 UAV的数量(个) $ M $ 1~3 UAV的发射功率(dBm) $ {P_t} $ 10 噪声功率(dBm) $ {N_0} $ –102 信噪比阈值(dB) ${{\rm{SNR}}_{{\rm{th}}} }$ 10 UAV覆盖半径阈值(m) ${R_{{\rm{th}}} }$ 300 带宽(MHz) $ B $ 0.2 边界长度(m) $ {R_L} $ 1 000 UAV的最大飞行高度(m) ${h_{\min } }$ 20 UAV的最小飞行高度(m) $ {h_{\max }} $ 500 视距传播额外路径损耗 ${\eta _{{\rm{Los}}} }$ 1 非视距传播额外路径损耗 ${\eta _{{\rm{nLos}}} }$ 20
下载: 导出CSV
-
[1] DONG Lei, ZHAO Hongyi, CHEN Yan, et al. Introduction on IMT-2020 5G trials in China[J]. IEEE Journal on Selected Areas in Communications, 2017, 35(8): 1849–1866. doi: 10.1109/JSAC.2017.2710678 [2] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics &Information Technology, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789 [3] YEOM J, HAN Y, CHANG Anjin, et al. Hurricane building damage assessment using post-disaster UAV data[C]. IGARSS 2019 - 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 2019: 9867–9870. [4] CHEN Kanghua, WANG Ying, ZHAO Junwei, et al. URLLC-oriented joint power control and resource allocation in UAV-assisted networks[J]. IEEE Internet of Things Journal, 2021, 8(12): 10103–10116. doi: 10.1109/JIOT.2021.3051322 [5] ZHAO Nan, LU Weidang, SHENG Min, et al. UAV-assisted emergency networks in disasters[J]. IEEE Wireless Communications, 2019, 26(1): 45–51. doi: 10.1109/MWC.2018.1800160 [6] ZHAN Pengcheng, YU Kai, and SWINDLEHURST A. Wireless relay communications with unmanned aerial vehicles: Performance and optimization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(3): 2068–2085. doi: 10.1109/TAES.2011.5937283 [7] ZHANG Shuhang, ZHANG Hongliang, DI Bichen, et al. Joint trajectory and power optimization for UAV relay networks[J]. IEEE Communications Letters, 2018, 22(1): 161–164. doi: 10.1109/LCOMM.2017.2763135 [8] PEARRE B and BROWN T X. Model-free trajectory optimization for wireless data ferries among multiple sources[C]. IEEE Globecom Workshops, Miami, USA, 2010: 1793–1798. [9] PARK J H, CHOI S C, AHN I Y, et al. Multiple UAVs-based surveillance and reconnaissance system utilizing IoT platform[C]. 2019 International Conference on Electronics, Information, and Communication (ICEIC), Auckland, New Zealand, 2019: 1–3. [10] AL-HOURANI A, KANDEEPAN S, and JAMALIPOUR A. Modeling air-to-ground path loss for low altitude platforms in urban environments[C]. 2014 IEEE Global Communications Conference, Austin, USA, 2014: 2898–2904. [11] 张广驰, 严雨琳, 崔苗, 等. 无人机基站的飞行路线在线优化设计[J]. 电子与信息学报, 2021, 43(12): 3605–3611. doi: 10.11999/JEIT200525ZHANG Guangchi, YAN Yulin, CUI Miao, et al. Online trajectory optimization for the UAV-mounted base stations[J]. Journal of Electronics &Information Technology, 2021, 43(12): 3605–3611. doi: 10.11999/JEIT200525 [12] GUO Hongzhi and LIU Jiajia. UAV-enhanced intelligent offloading for internet of things at the edge[J]. IEEE Transactions on Industrial Informatics, 2020, 16(4): 2737–2746. doi: 10.1109/TII.2019.2954944 [13] ZENG Yong and ZHANG Rui. Energy-efficient UAV communication with trajectory optimization[J]. IEEE Transactions on Wireless Communications, 2017, 16(6): 3747–3760. doi: 10.1109/TWC.2017.2688328 [14] CUI Jian, SHAKHATREH H, HU Bo, et al. Power-efficient deployment of a UAV for emergency indoor wireless coverage[J]. IEEE Access, 2018, 6: 73200–73209. doi: 10.1109/ACCESS.2018.2882896 [15] HAN Bing, LI Qingmei, and CHENG Chengqi. Research on UAV indoor path planning algorithm based on global subdivision grids[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 2021: 8503–8506. [16] WANG Lei, HU Bo, and CHEN Shanzhi. Energy efficient placement of a drone base station for minimum required transmit power[J]. IEEE Wireless Communications Letters, 2020, 9(12): 2010–2014. doi: 10.1109/LWC.2018.2808957 [17] MA Xiaoyong, HU Shuting, ZHOU Danyang, et al. Adaptive deployment of UAV-aided networks based on hybrid deep reinforcement learning[C]. 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, Canada, 2020: 1–6. -

 下载:
下载:



图(7) / 表(2)
计量
- 文章访问数: 924
- HTML全文浏览量: 652
- PDF下载量: 112
- 被引次数: 0
