

Research on Optimal Beamforming Design of Ultra-low Frequency Antenna
-
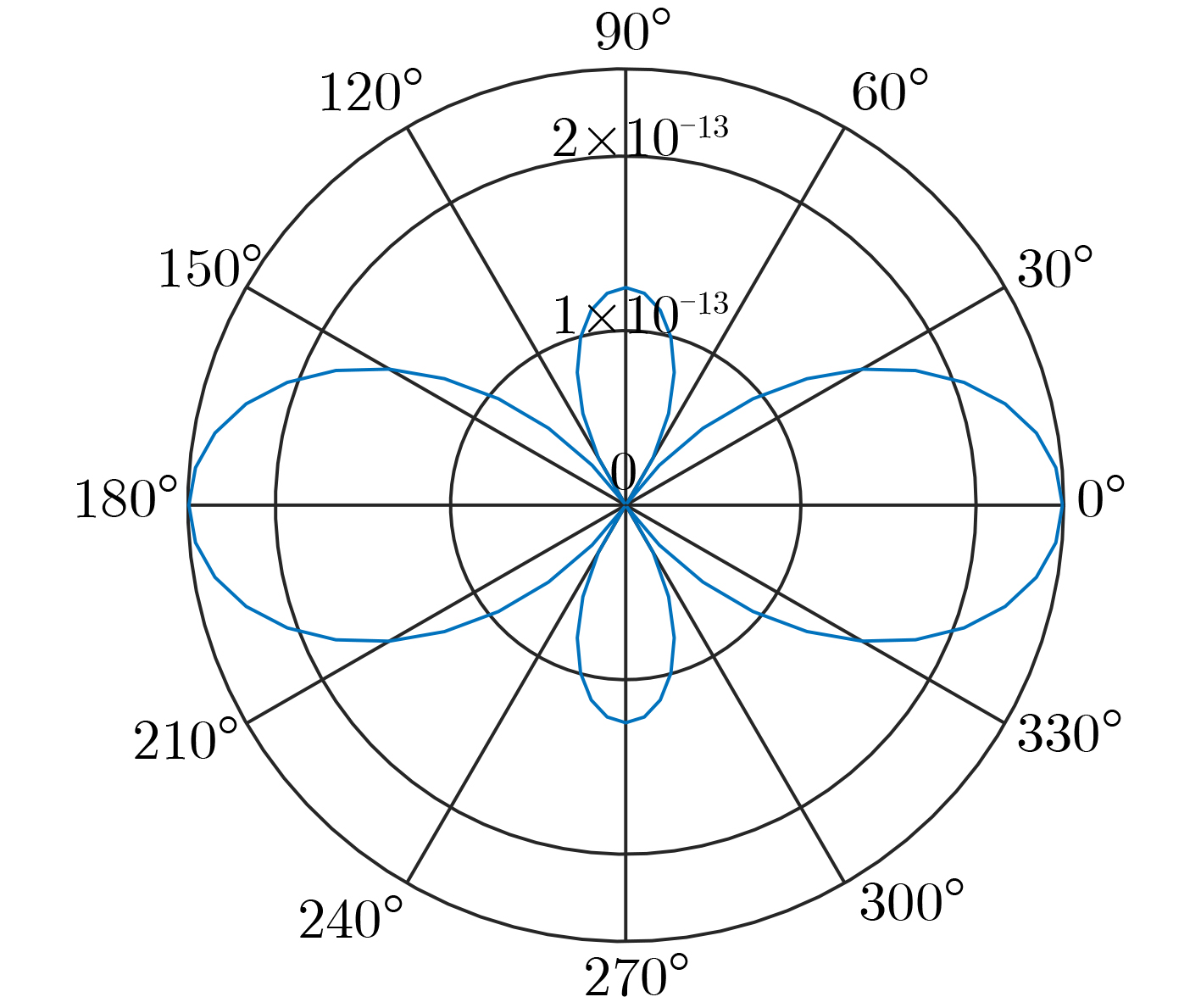
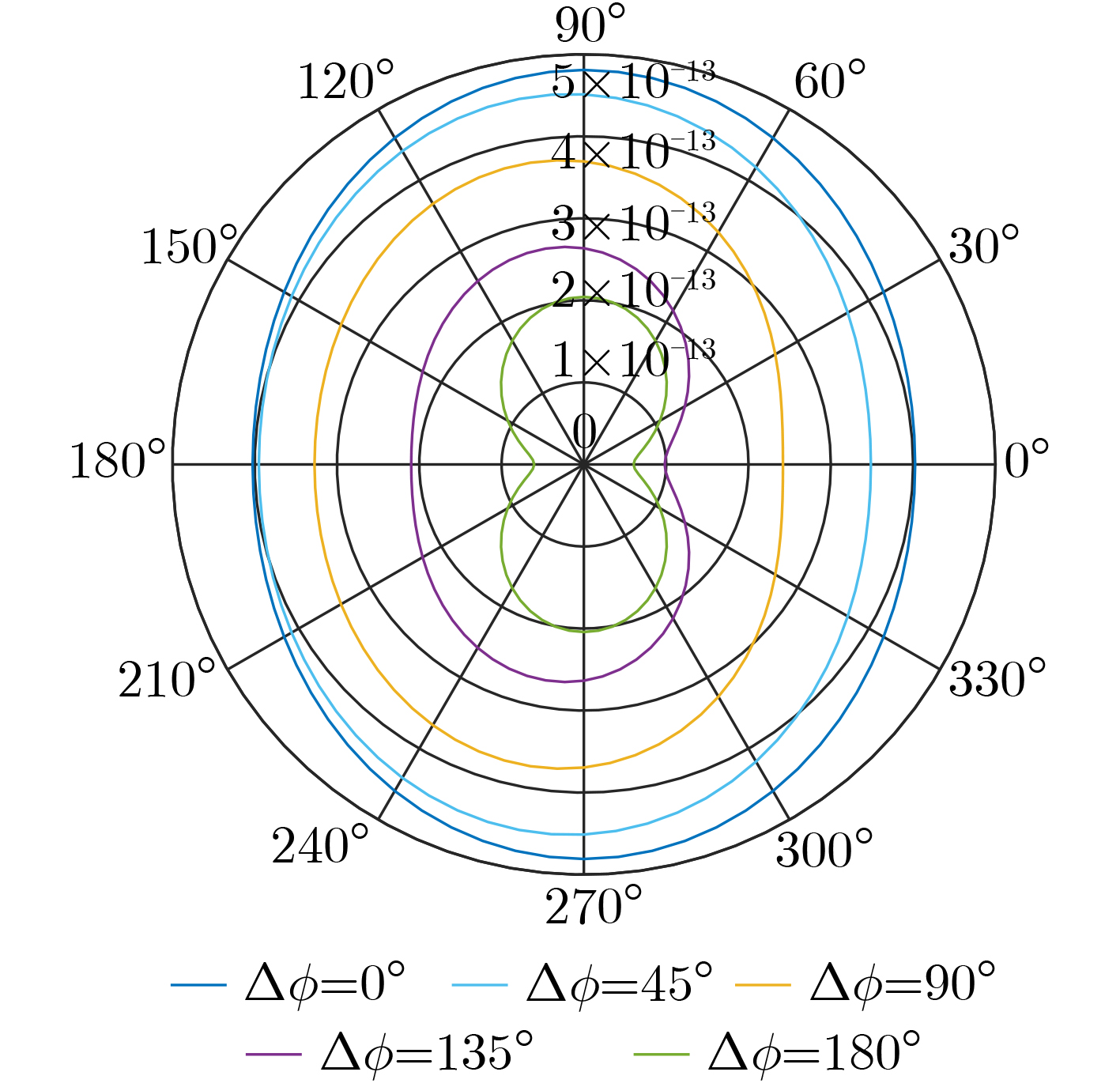
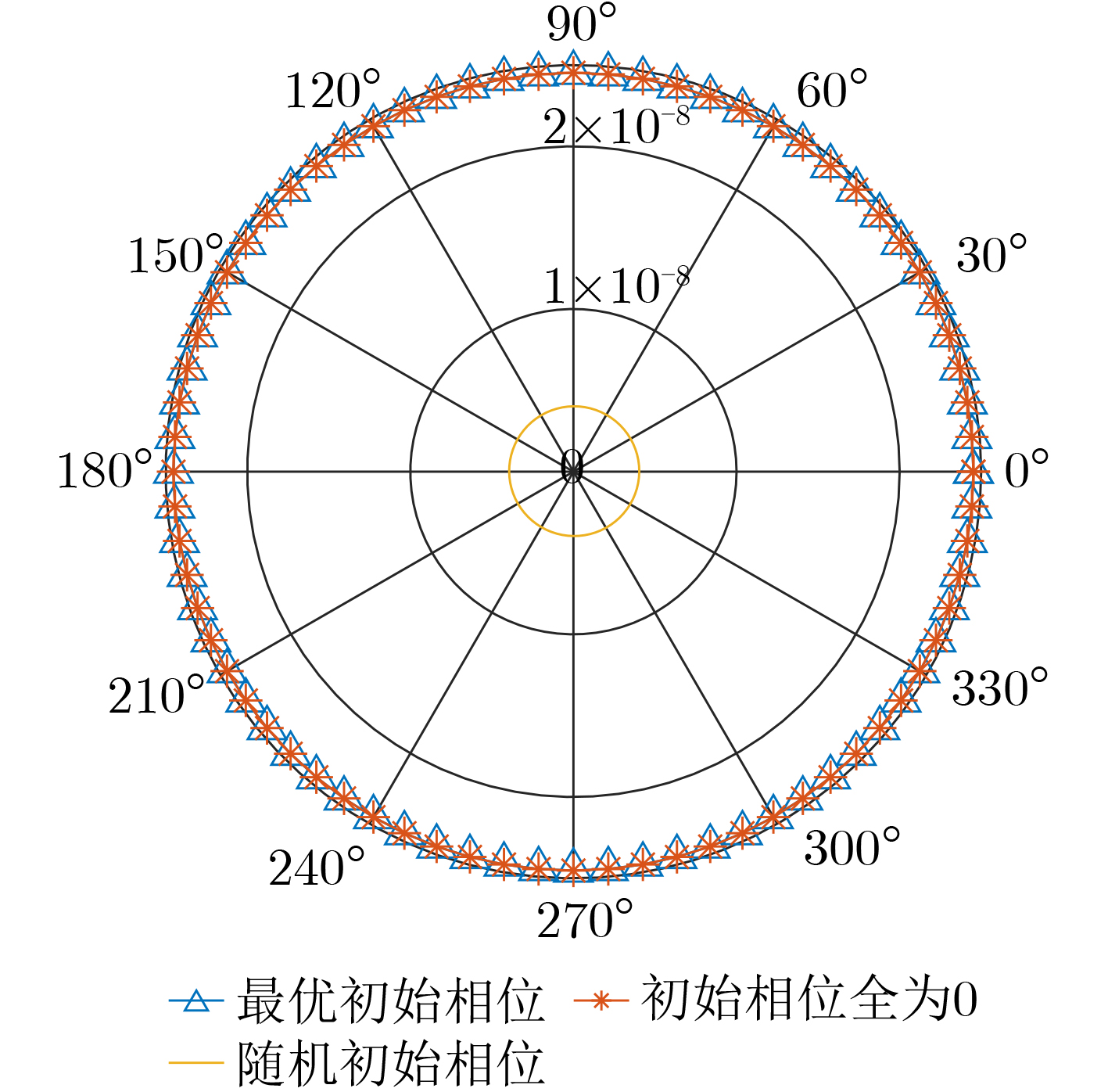
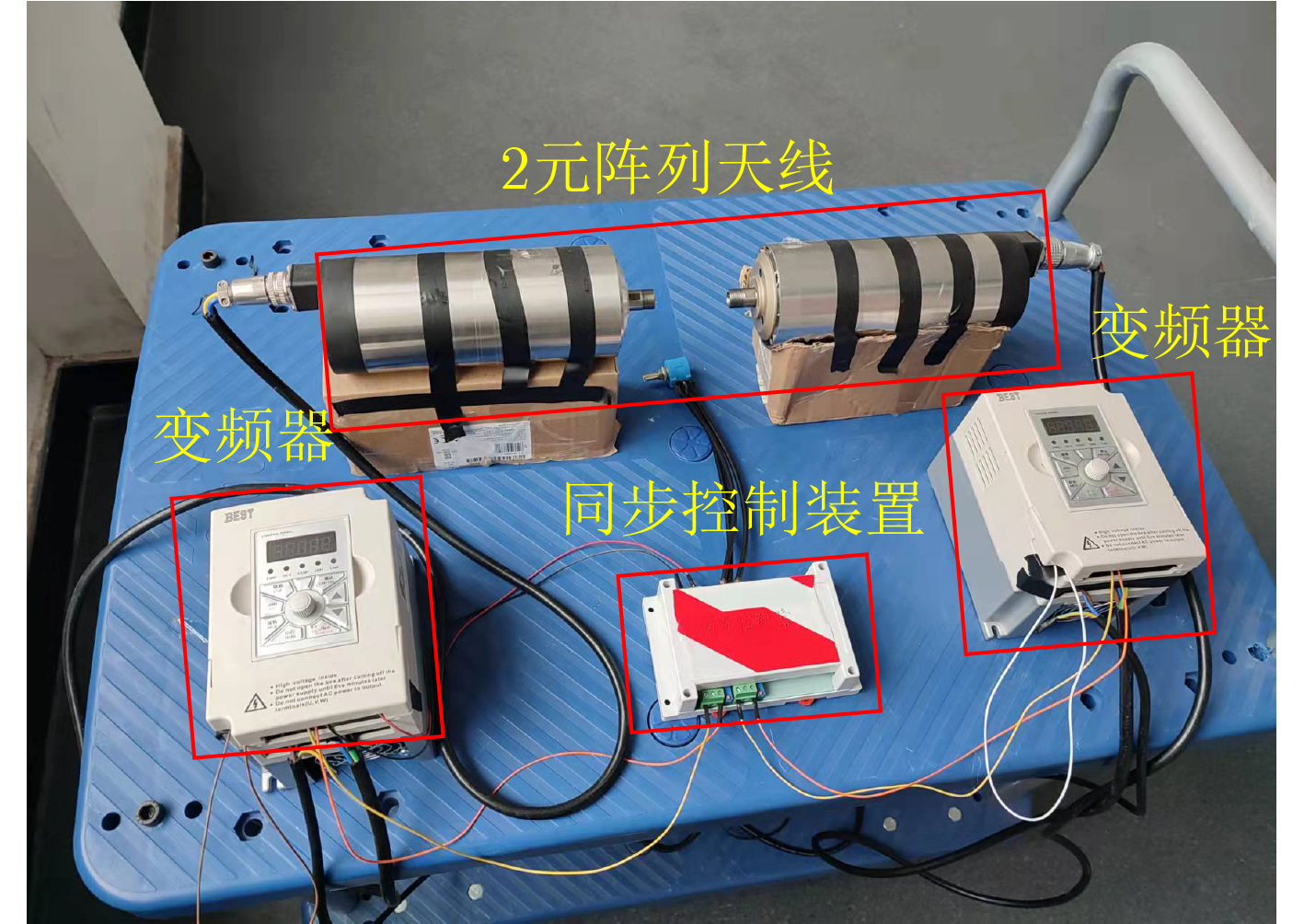
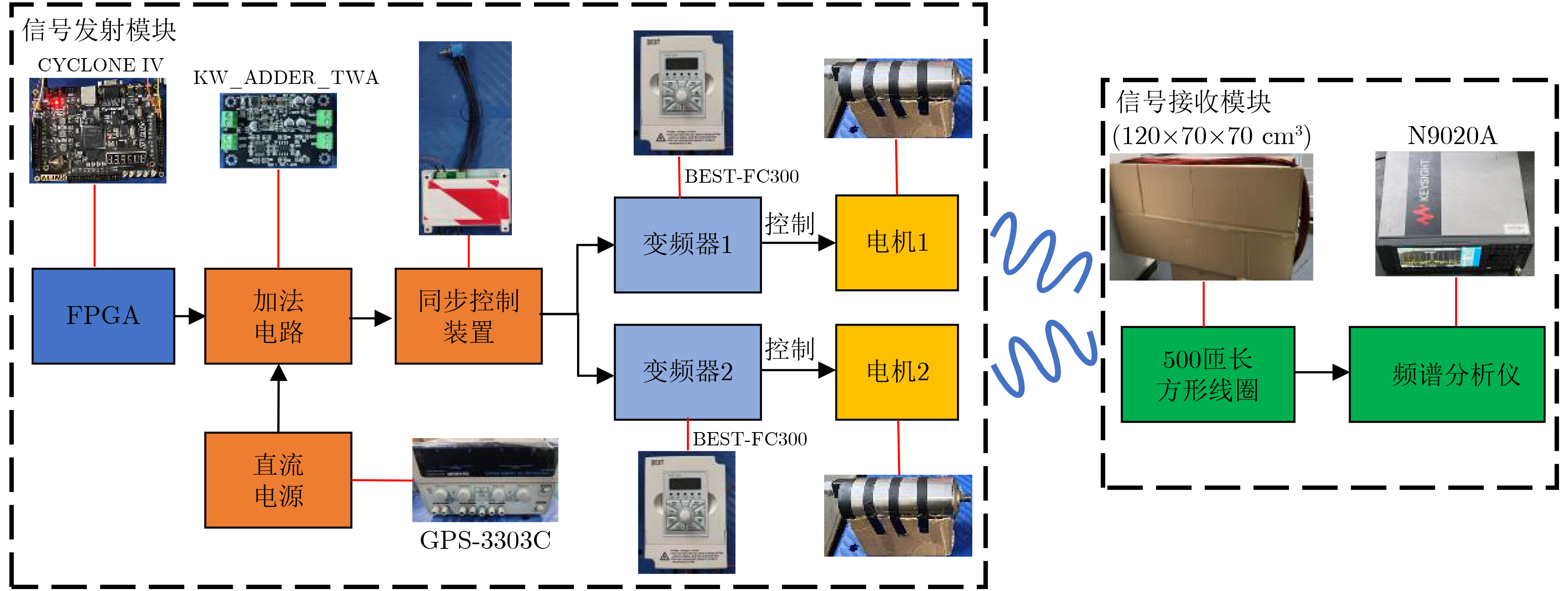
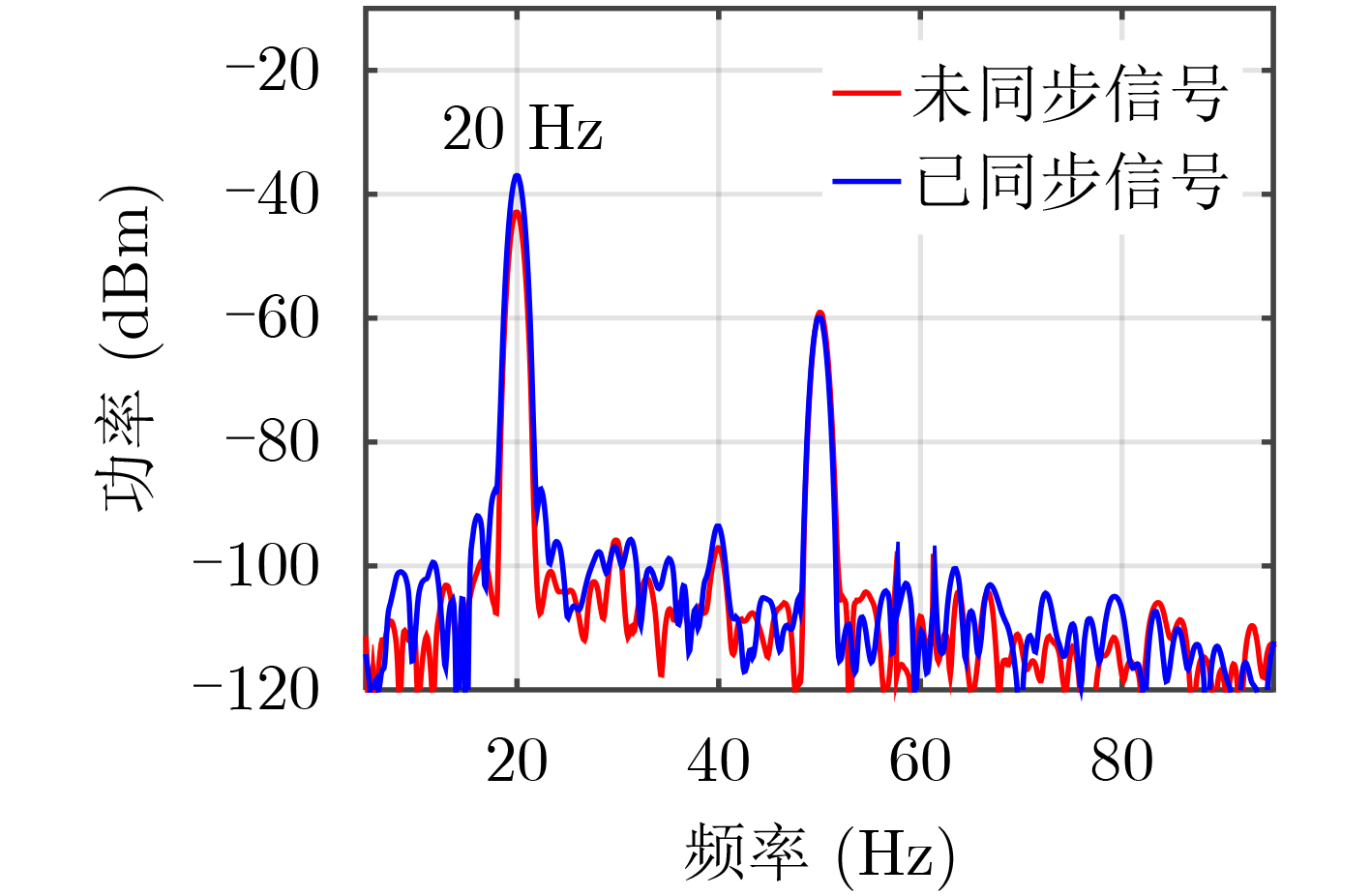
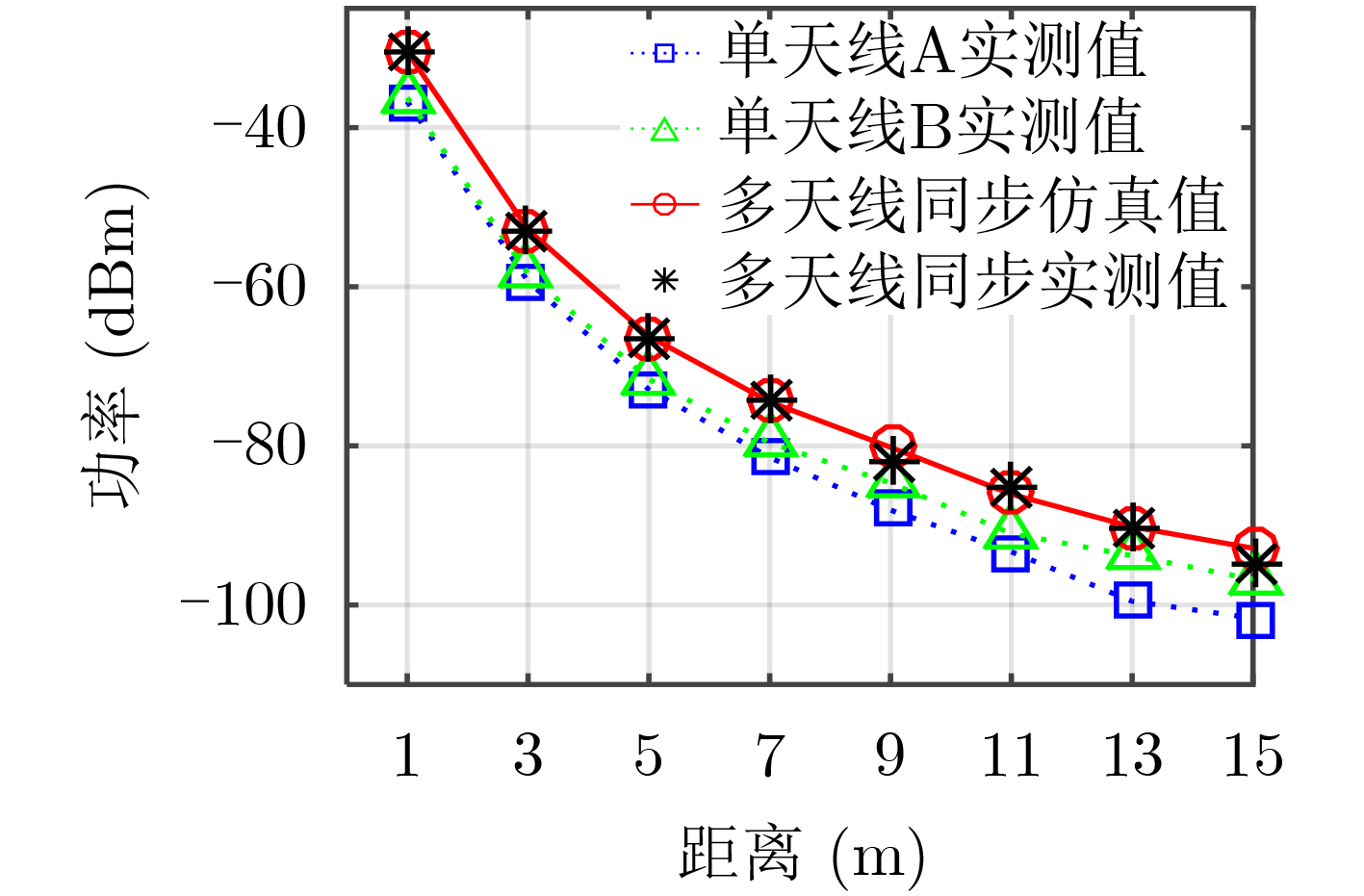
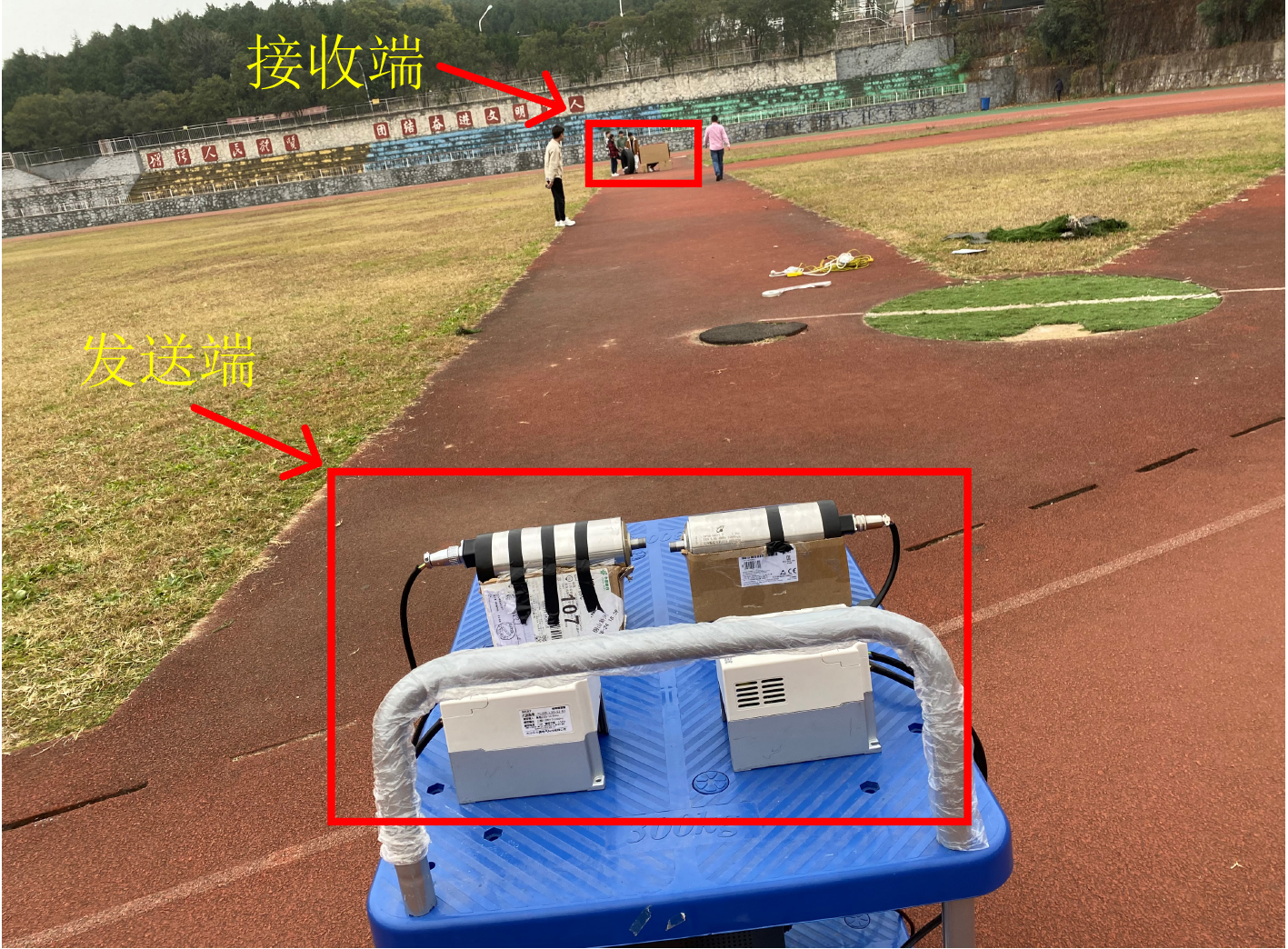
摘要: 针对现有超低频天线发射端单一化缺陷和通信距离受限瓶颈,为实现超低频电磁发信系统的小型化和远距离传输,该文对旋转式永磁体机械天线的超低频电磁发信技术进行了理论创新和工程实践。探究多输入单输出 (MISO)场景下超低频多机械天线电磁辐射理论,建立了基于三相感应电机的多机械天线阵列的空间磁场分布模型。仿真结果表明:利用三相感应电机组成的2元机械天线阵列可使磁感应强度在近场提高3 dB。该文还提出了多天线超低频近场最优波束成型技术。仿真结果表明:当天线之间的初始相位相等时径向接收磁场分量场强最大。设计高精度同步技术并搭建原理样机进行测试,实验结果表明:发送端采用2元天线组阵,信号功率提高6 dBm,传输距离可达50 m。Abstract: Considering the single defect of the transmitter of the existing mechanical ultra-low frequency antenna and the bottleneck of limited communication distance, In order to realize the miniaturization and long-distance transmission of ultra-low frequency electromagnetic signaling system, the theoretical innovation and engineering practice of low-frequency electromagnetic signaling technology of rotating permanent magnet mechanical antenna are carried out. The electromagnetic radiation theory of ultra-low frequency multi mechanical antenna in Multiple Input Single Output (MISO) scenario is explored, and the spatial magnetic field distribution model of multi mechanical antenna array based on three-phase induction motor is established. The simulation results show that the magnetic induction intensity can be increased by 3 dB in the near field by using the mechanical antenna array composed of three-phase induction motor. The ultra-low frequency near-field optimal beamforming technology with multiple mechanical antennas is proposed, The simulation results show that when the initial phases between the antennas are equal, the field strength of the radial received magnetic field component is the largest. High precision synchronization is designed and principle prototype is setted up for testing, The experimental results show that the signal power increased by 6 dBm and transmission distance can reach 50 m by using binary antenna array.
-
Key words:
- Rotating magnet antenna /
- Beamforming /
- Phase synchronization
-
表 1 设备相关规格参数
设备名称 尺寸(cm) 额定电压(V) 额定电流(A) 额定功率(W) 额定转速(r/min) 材质 三相感应电机 $\varPhi$10×80 AC 220/380 5 1 500 24 000 铝合金 同步控制装置 9×12 AC/DC 24 0.043 1 / 塑料 变频器 10×15 单相 220 7 1 500 / 阻燃ABS塑料  下载: 导出CSV
下载: 导出CSV
-
[1] 罗卓颖, 刘翠海, 黄玉成, 等. 超低频传播特性分析[J]. 舰船电子工程, 2009, 29(2): 148–150. doi: 10.3969/j.issn.1627-9730.2009.02.044LUO Zhuoying, LIU Cuihai, HUANG Yucheng, et al. Analysis of the characteristic of super low frequency propagation[J]. Ship Electronic Engineering, 2009, 29(2): 148–150. doi: 10.3969/j.issn.1627-9730.2009.02.044 [2] CHU L J. Physical limitations of omni-directional antennas[J]. Journal of Applied Physics, 1948, 19(12): 1163–1175. doi: 10.1063/1.1715038 [3] HARRINGTON R F. Effect of natenna size on gain, bandwidth, and efficiency[J]. Journal of Research of the National Bureau of Standards, 1960, 64D(1): 1–12. doi: 10.6028/jres.064d.003 [4] 王洪民, 阚锎. 大功率低频、超低频放大器实现途径及特点[J]. 电子测量技术, 2011, 34(9): 18–22. doi: 10.19651/j.cnki.emt.2011.09.006WANG Hongmin and KAN Kai. Realization approach and characteristics of high power low-frequency ultra-low frequency amplifier[J]. Electronic Measurement Technology, 2011, 34(9): 18–22. doi: 10.19651/j.cnki.emt.2011.09.006 [5] DARPA. A MEchanically based antenna (AMEBA)[P]. US, HR001117S0007, 2016. [6] 丁宏. DARPA机械天线项目或掀起军事通信革命[J]. 现代军事, 2017(4): 71–73.DING Hong. DARPA’s mechanical antenna program could revolutionize military communication[J]. Conmilit, 2017(4): 71–73. [7] SELVIN S, PRASAD M N S, HUANG Yikun, et al. Spinning magnet antenna for VLF transmitting[C]. 2017 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, San Diego, USA, 2017: 1477–1478. [8] PRASAD M N S, SELVIN S, TOK R U, et al. Directly modulated spinning magnet arrays for ULF communications[C]. 2018 IEEE Radio and Wireless Symposium, Anaheim, USA, 2018: 171–173. [9] BARANI N and SARABANDI K. Mechanical antennas: Emerging solution for Very-Low Frequency (VLF) communication[C]. 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, USA, 2018: 95–96. [10] FAWOLE O C and TABIB-AZAR M. An electromechanically modulated permanent magnet antenna for wireless communication in harsh electromagnetic environments[J]. IEEE Transactions on Antennas and Propagation, 2017, 65(12): 6927–6936. doi: 10.1109/TAP.2017.2761555 [11] GOŁKOWSKI M, PARK J, BITTLE J, et al. Novel mechanical magnetic shutter antenna for ELF/VLF radiation[C]. 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, USA, 2018: 65–66. [12] SRINIVAS P M N, TOK R U, and WANG Y E. Magnetic pendulum arrays for ULF transmission[C]. 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, USA, 2018: 71–72. [13] 曹峻. ELF-ULF机械通信天线的研究[D]. [硕士论文], 西安电子科技大学, 2020.CAO Jun. Research on ELF-ULF mechanical communication antenna[D]. [Master dissertation], Xidian University, 2020. [14] 周强, 施伟, 刘斌, 等. 旋转永磁式机械天线的研究与实现[J]. 国防科技大学学报, 2020, 42(3): 128–136. doi: 10.11887/j.cn.202003017ZHOU Qiang, SHI Wei, LIU Bin, et al. Research and practice of the mechanical antennas based on rotating permanent magnet[J]. Journal of National University of Defense Technology, 2020, 42(3): 128–136. doi: 10.11887/j.cn.202003017 [15] 施伟, 周强, 刘斌. 基于旋转永磁体的超低频机械天线电磁特性分析[J]. 物理学报, 2019, 68(18): 188401. doi: 10.7498/aps.68.20190339SHI Wei, ZHOU Qiang, and LIU Bin. Performance analysis of spinning magnet as mechanical antenna[J]. Acta Physica Sinica, 2019, 68(18): 188401. doi: 10.7498/aps.68.20190339 -


 下载:
下载:




图(12) / 表(1)
计量
- 文章访问数: 1283
- HTML全文浏览量: 1125
- PDF下载量: 157
- 被引次数: 0
