

UAV Assisted Communication Network Uplink Transmission Technology Based on Joint Beamforming
-
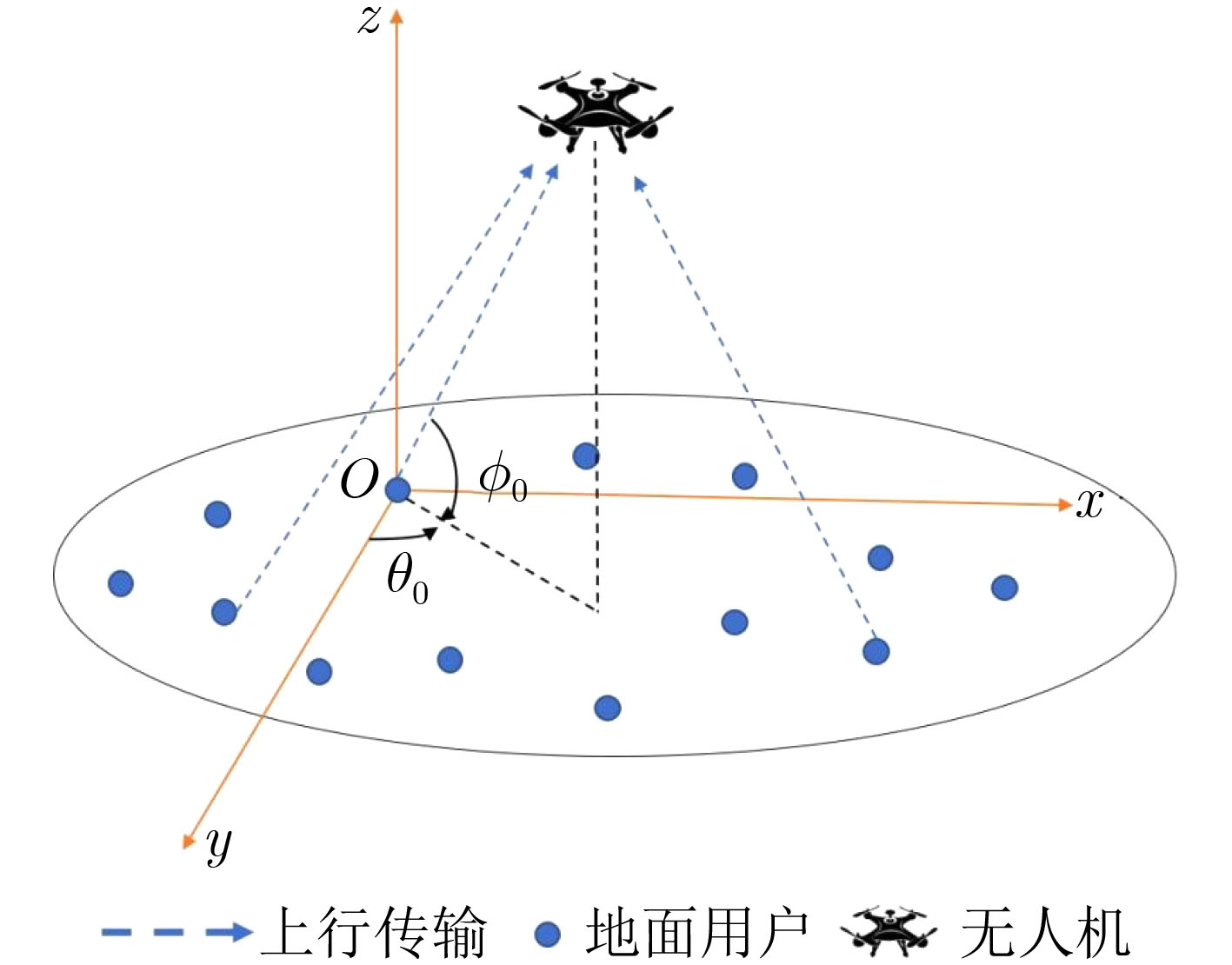
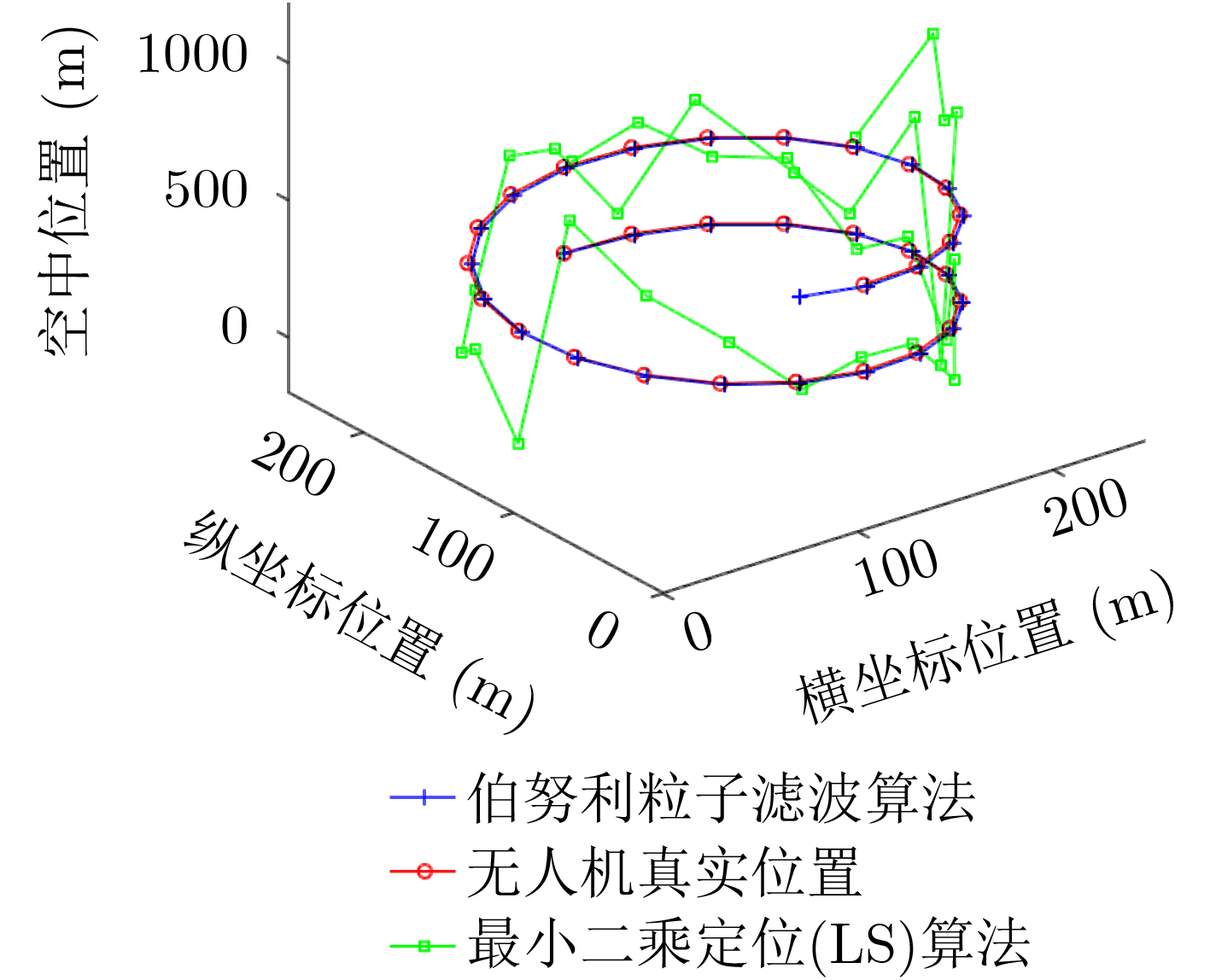
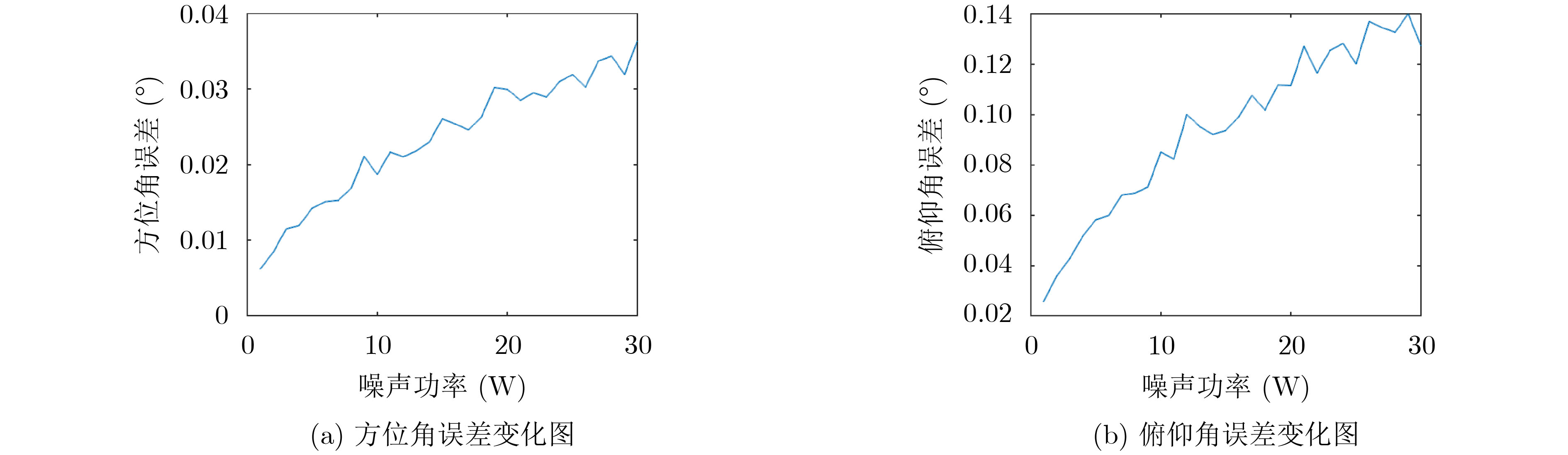
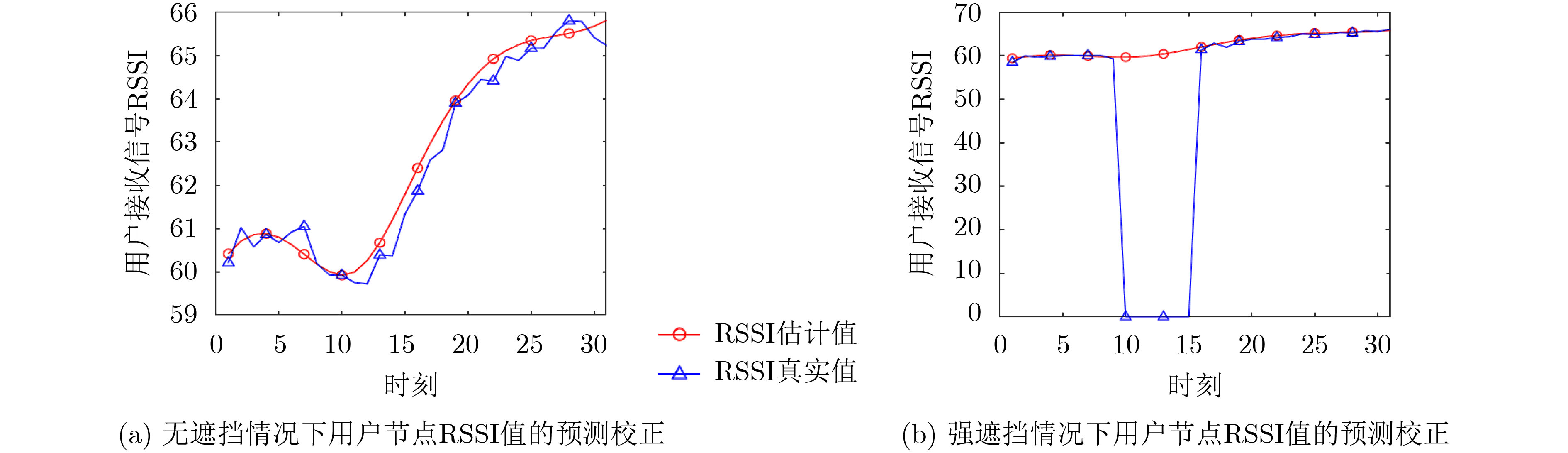
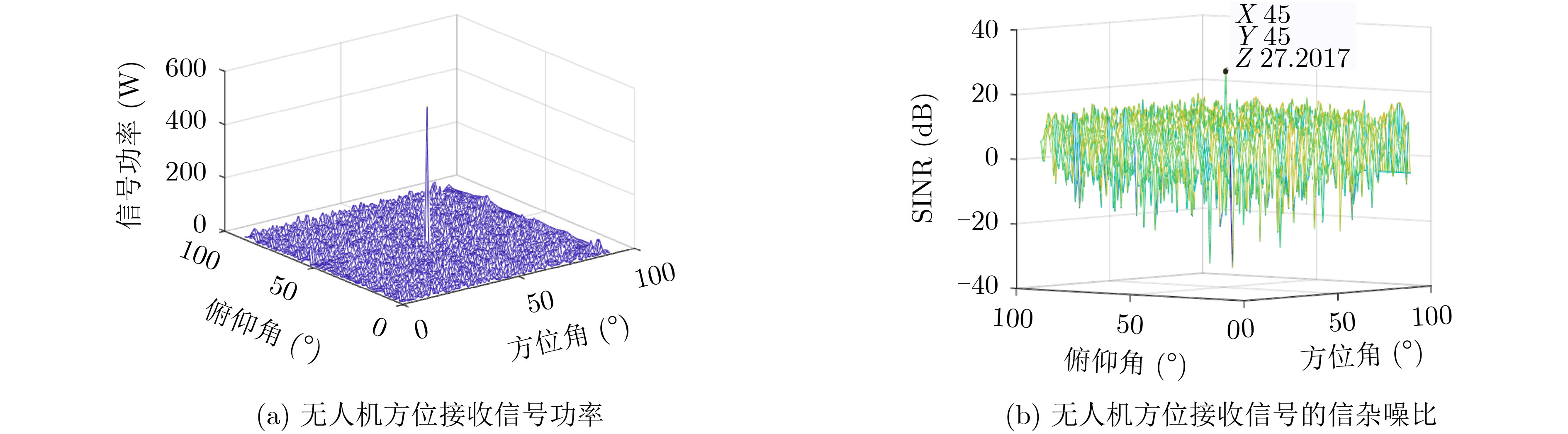
摘要: 无人机辅助通信网络可以对现有无线通信网络进行补充,改善通信系统性能以及覆盖服务范围,但无人机辅助通信过程中上行传输通信速率的提高仍面临着巨大的挑战。针对如何提高无人机辅助通信网络的上行传输通信速率问题,该文提出了一种基于联合波束赋形的无人机辅助通信网络上行传输技术。首先,对用户节点接收信号强度值进行伯努利粒子滤波,结合无人机运动模型完成无人机定位,进一步用户节点联合运用分布式波束赋形算法向无人机方向发送信号,完成上行传输通信。并与非正交多址接入算法以及传统全向发射算法进行了对比,实验结果表明,所提方法显著提高了无人机接收信号的信噪比、通信速率,保障了无人机上行通信的通信质量,为未来无人机辅助通信网络的上行传输提供了一种极具潜力的保障通信性能解决方案。Abstract: The UAV-assisted communication network can supplement the existing wireless communication network and improve the performance of the communication system and the coverage service range, but the improvement of the uplink transmission communication rate in the process of UAV-assisted communication still faces huge challenges. Aiming at how to improve the uplink transmission communication rate of UAV-assisted communication network, this paper proposes a UAV-assisted communication network uplink transmission technology based on joint beamforming. First, Bernoulli particle filtering is performed on the received signal strength value of the user node, combined with the UAV motion model to complete the UAV positioning, and further, the user node uses jointly the distributed beamforming algorithm to send signals to the UAV direction to complete the uplink transmission communication. Compared with the non-orthogonal multiple access algorithm and the traditional omnidirectional transmission algorithm, the experimental results show that the proposed method improves significantly the signal-to-noise ratio and communication rate of the UAV received signal, and ensures the uplink communication of the UAV. It provides a potential solution to guarantee the communication performance for the uplink transmission of the UAV-assisted communication network in the future.
-
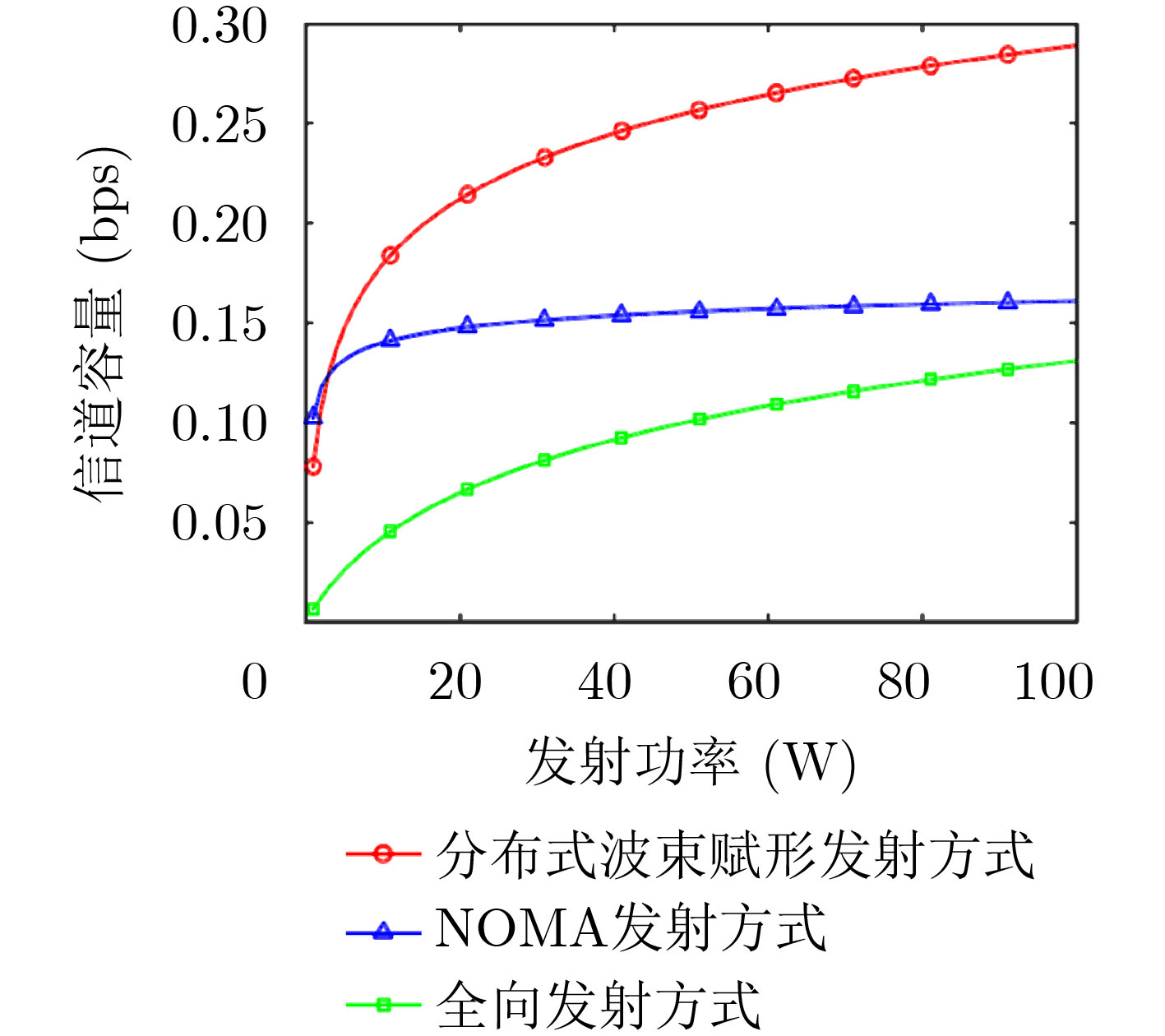
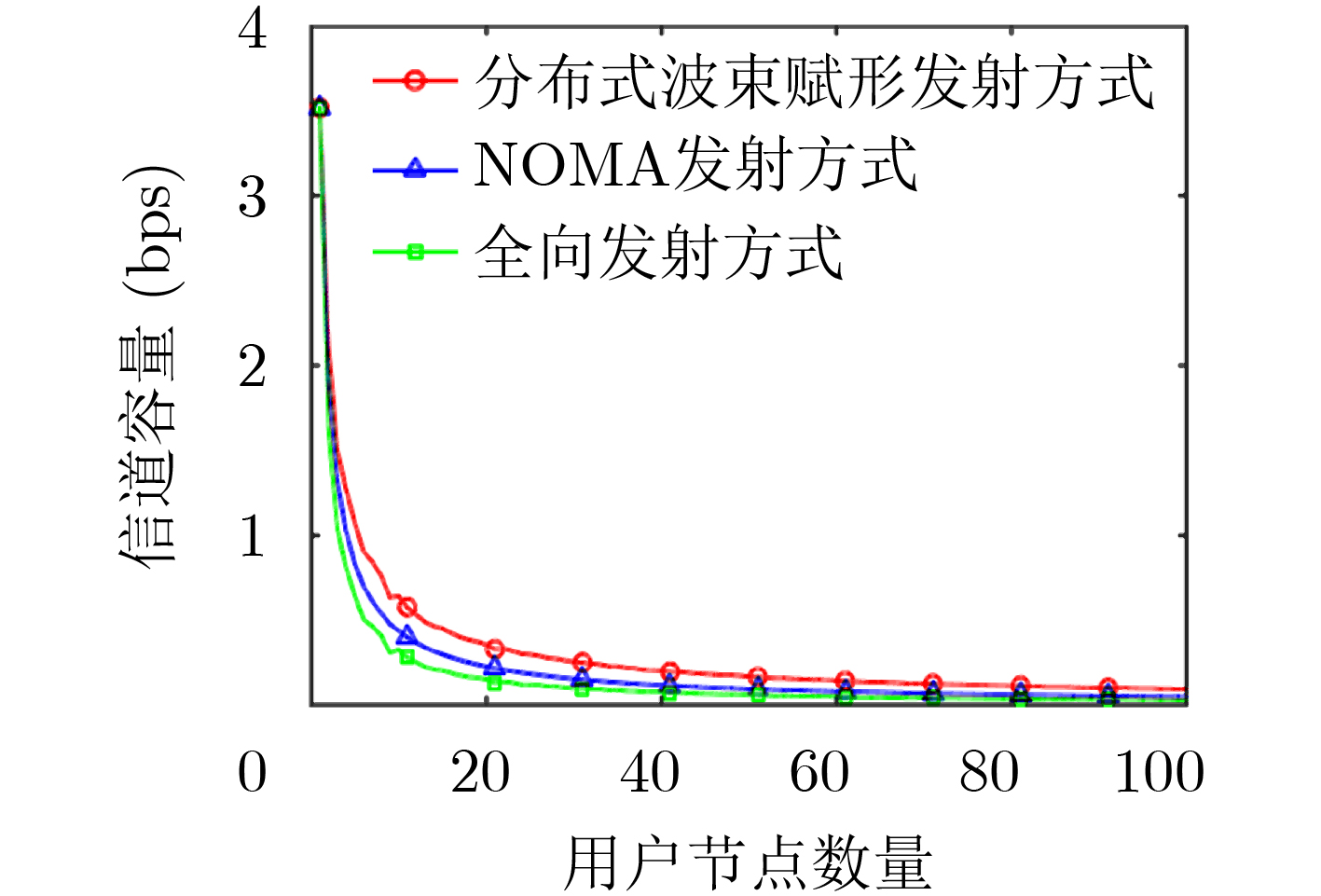
表 1 不同发射方式的信道容量(bps)随用户数量增加(倍)对比表
用户数量 1~20 21~40 41~60 61~80 81~100 与NOMA发射方式对比 1.36 1.65 1.76 1.84 1.89 与全向发射方式对比 1.95 2.54 2.78 2.93 3.05  下载: 导出CSV
下载: 导出CSV
-
[1] JIANG Feng and SWINDLEHURST A L. Optimization of UAV heading for the ground-to-air uplink[J]. IEEE Journal on Selected Areas in Communications, 2012, 30(5): 993–1005. doi: 10.1109/JSAC.2012.120614 [2] HUA Meng, YANG Luxi, WU Qingqing, et al. 3D UAV trajectory and communication design for simultaneous uplink and downlink transmission[J]. IEEE Transactions on Communications, 2020, 68(9): 5908–5923. doi: 10.1109/TCOMM.2020.3003662 [3] MEI Weidong, WU Qingqing, and ZHANG Rui. Cellular-connected UAV: Uplink association, power control and interference coordination[C]. 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 2018: 206–212. [4] LIU Liang, ZHANG Shuowen, and ZHANG Rui. Cooperative interference cancellation for multi-beam UAV uplink communication: A DoF analysis[C]. 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 2018: 1–6. [5] LIU Liang, ZHANG Shuowen, and ZHANG Rui. Exploiting NOMA for multi-beam UAV communication in cellular uplink[C]. ICC 2019 - 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 2019: 1–6. [6] DUAN Ruiyang, WANG Jingjing, JIANG Chunxiao, et al. Resource allocation for multi-UAV aided IoT NOMA uplink transmission systems[J]. IEEE Internet of Things Journal, 2019, 6(4): 7025–7037. doi: 10.1109/JIOT.2019.2913473 [7] 郝勇. 无人机辅助的非正交多址系统的联合上下行优化研究[D]. [硕士论文], 哈尔滨工业大学, 2020.HAO Yong. Joint uplink and downlink optimization of UAV-assisted non-orthogonal multiple access system[D]. [Master dissertation], Harbin Institute of Technology, 2020. [8] REZVANI S M and KESHAVARZ H. Distributed beamforming design for SINR balancing approach in cooperative two-way networks based on second-order statistics[C]. 2015 23rd Iranian Conference on Electrical Engineering, Tehran, Iran, 2015: 358–362. [9] HAVARY-NASSAB V, SHAHBAZPANAHI S, GRAMI A, et al. Distributed beamforming for relay networks based on second-order statistics of the channel state information[J]. IEEE Transactions on Signal Processing, 2008, 56(9): 4306–4316. doi: 10.1109/TSP.2008.925945 [10] HAVARY-NASSAB V, SHAHBAZPANAHI S, GRAMI A, et al. Network beamforming based on second order statistics of the channel state information[C]. 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, USA, 2008: 2605–2608. [11] 纪密. 基于单载波频域均衡技术的无人机上行通信链路设计实现[D]. [硕士论文], 电子科技大学, 2018.JI Mi. The design and implementation of UAV uplink communication based on single-carrier frequency domain equalization[D]. [Master dissertation], University of Electronic Science and Technology of China, 2018. [12] 熊海良, 孙德春, 田红心, 等. 无人机上行链路数据传输方案[J]. 吉林大学学报:工学版, 2010, 40(1): 276–280. doi: 10.13229/j.cnki.jdxbgxb2010.01.026XIONG Hailiang, SUN Dechun, TIAN Hongxin, et al. Uplink data transmission scheme for unmanned aerial vehicle[J]. Journal of Jilin University:Engineering and Technology Edition, 2010, 40(1): 276–280. doi: 10.13229/j.cnki.jdxbgxb2010.01.026 [13] 吴佳丽. 稳健波束形成及分布式阵列相干发射研究[D]. [硕士论文], 西安电子科技大学, 2020.WU Jiali. Research on robust beamforming and distributed array coherent transmission[D]. [Master dissertation], Xidian University, 2020. [14] 邱怡飞. 基于卡尔曼滤波的目标定位与跟踪算法研究[D]. [硕士论文], 北京邮电大学, 2021.QIU Yifei. Research on the target location and tracking algorithm based on Kalman filter[D]. [Master dissertation], Beijing University of Posts and Telecommunications, 2021. [15] CANDY J V. Bootstrap particle filtering[J]. IEEE Signal Processing Magazine, 2007, 24(4): 73–85. doi: 10.1109/MSP.2007.4286566 [16] RISTIC B, VO B T, VO B N, et al. A tutorial on Bernoulli filters: Theory, implementation and applications[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3406–3430. doi: 10.1109/TSP.2013.2257765 [17] 高骏. 基于粒子滤波的无人机无源定位跟踪研究[D]. [硕士论文], 北京邮电大学, 2021.GAO Jun. Research on an improved particle filter for UAV passive tracking based on RSS[D]. [Master dissertation], Beijing University of Posts and Telecommunications, 2021. [18] ROHAL P and OCHODNICKY J. Radar target tracking by Kalman and particle filter[C]. 2017 Communication and Information Technologies (KIT), Vysoke Tatry, Slovakia, 2017: 1–4. [19] SAUCAN A A, COATES M J, and RABBAT M. A multisensor multi-Bernoulli filter[J]. IEEE Transactions on Signal Processing, 2017, 65(20): 5495–5509. doi: 10.1109/TSP.2017.2723348 [20] GNING A, RISTIC B, and MIHAYLOVA L. Bernoulli particle/box-particle filters for detection and tracking in the presence of triple measurement uncertainty[J]. IEEE Transactions on Signal Processing, 2012, 60(5): 2138–2151. doi: 10.1109/TSP.2012.2184538 [21] CHEN Kuoming, CHANG T H, and LEE T S. Lifetime maximization for uplink transmission in UAV-enabled wireless networks[C]. 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 2019: 1–6. [22] 何成文, 袁运斌, 潭冰峰. 一种基于UWB TDOA定位模式的迭代最小二乘算法[J]. 大地测量与地球动力学, 2021, 41(8): 806–809. doi: 10.14075/j.jgg.2021.08.007HE Chengwen, YUAN Yunbin, and TAN Bingfeng. An iterative least squares algorithm based on UWB TDOA positioning model[J]. Journal of Geodesy and Geodynamics, 2021, 41(8): 806–809. doi: 10.14075/j.jgg.2021.08.007 [23] 邱怡飞, 吕鹏, 刘晓凯, 等. 基于RSSI的预滤波定位算法研究[J]. 无线电工程, 2021, 51(5): 367–372. doi: 10.3969/j.issn.1003-3106.2021.05.005QIU Yifei, LV Peng, LIU Xiaokai, et al. Research on prefilter location algorithm based on RSSI[J]. Radio Engineering, 2021, 51(5): 367–372. doi: 10.3969/j.issn.1003-3106.2021.05.005 -

 下载:
下载:



图(8) / 表(1)
计量
- 文章访问数: 1598
- HTML全文浏览量: 767
- PDF下载量: 177
- 被引次数: 0
