

Cooperative Target Location Method Based on Master-slave Autonomous Underwater Vehicles Mobile Network
-
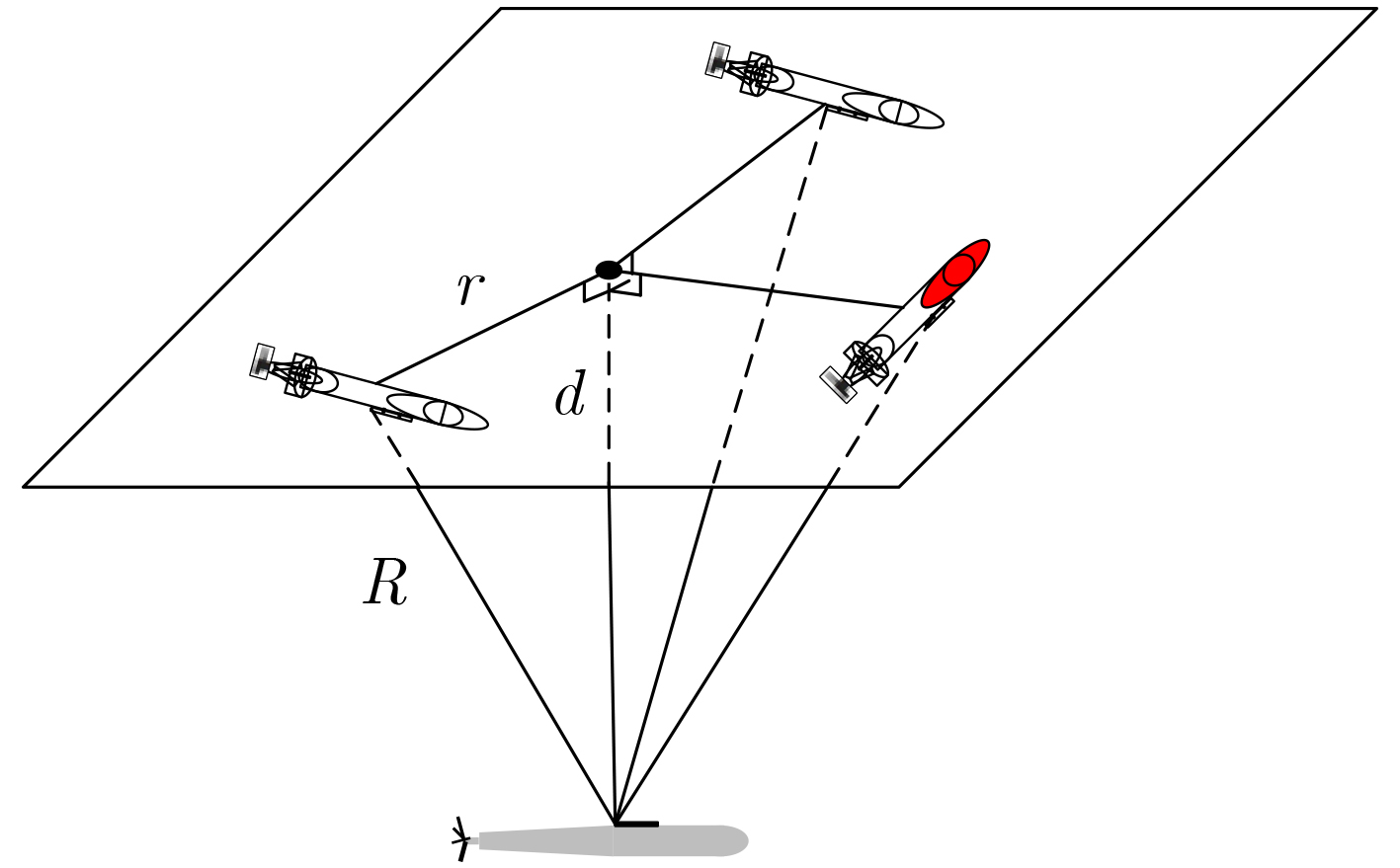
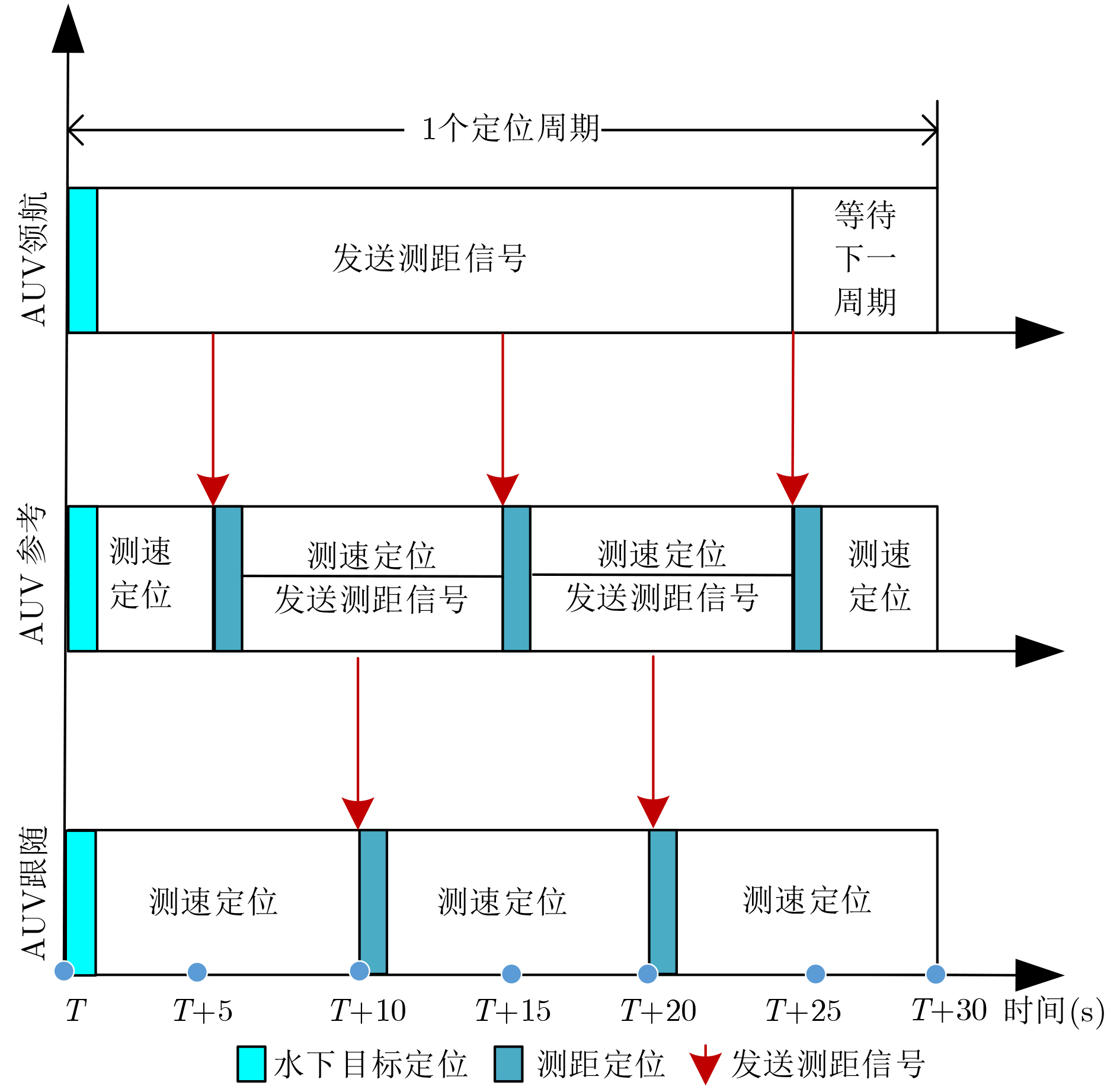
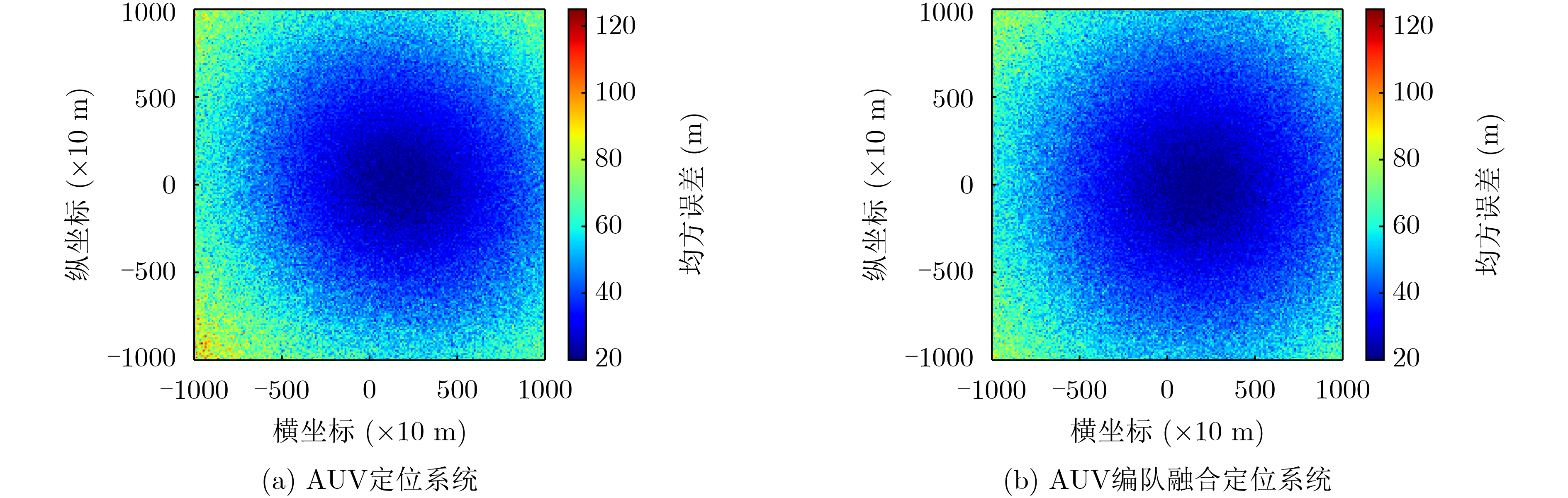
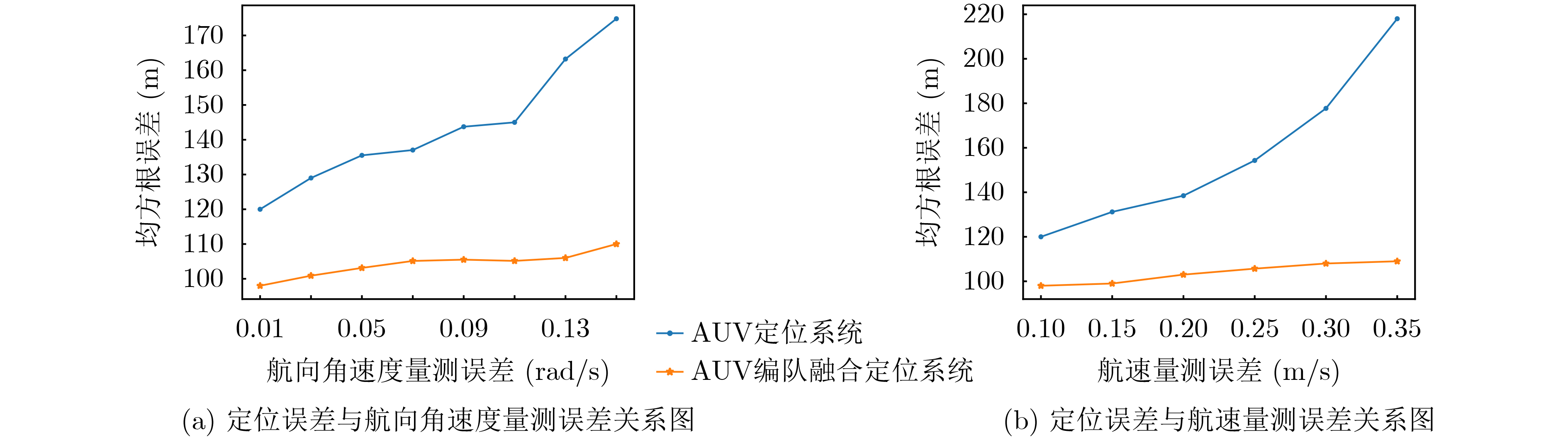
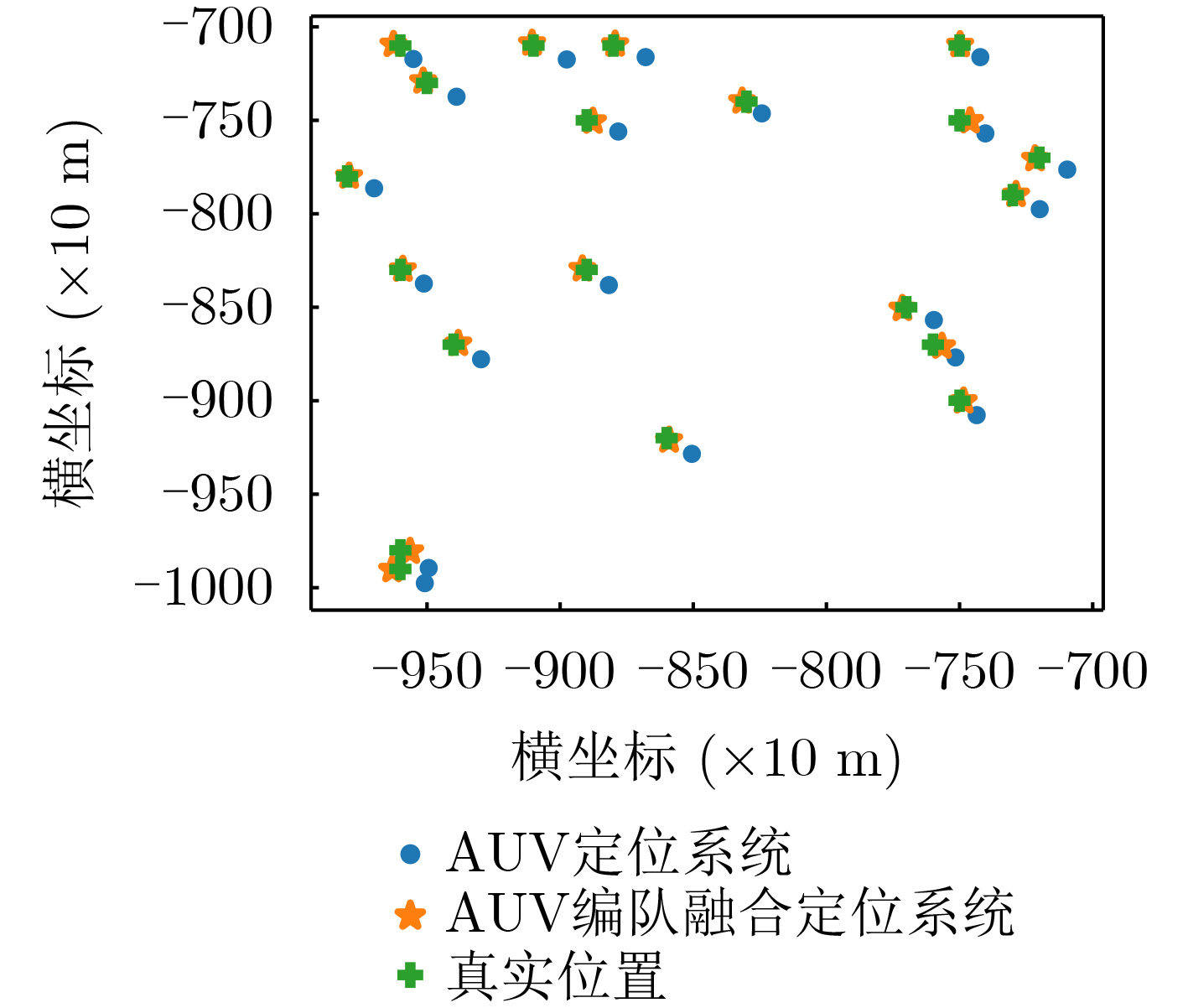
摘要: 利用水下自主航行器(AUVs)协同编队可以在未知水域中实现对目标的定位。针对AUV导航误差导致定位精度降低问题,该文提出一种基于扩展卡尔曼滤波器(EKF)的多AUV编队融合观测协同目标定位算法。AUV编队由一个装备有高精度惯性导航系统(INS)的领航AUV以及多个装配有低精度INS的跟随AUV组成。从跟随AUV中选取参考AUV和待测AUV,通过设置定位周期和观测间隔来分别对其进行不同的观测。参考AUV作为中转,接收来自高精度AUV位置参数后,向待测AUV传递自身位置参数,利用扩展卡尔曼滤波器完成对AUV集群的协同位置修正。仿真结果表明,该方法AUV集群自身定位精度高且误差随时间积累小,对领航AUV数量需求少,能够实现水下目标低功耗、远距离定位。
-
关键词:
- 水下自主航行器导航定位 /
- 水下自主航行器编队 /
- 扩展卡尔曼滤波
Abstract: The cooperative formation of Autonomous Underwater Vehicles (AUVs) can be used to locate targets in unknown waters. In order to reduce the positioning error caused by AUV navigation errors, a multi-AUV formation fusion observation cooperative target positioning algorithm based on Extended Kalman Filter (EKF) is proposed in this paper. The AUV formation consists of a pilot AUV equipped with a high precision Inertial Navigation System (INS) and several following AUVs equipped with low precision INS. The reference AUV and the AUV to be measured are selected from the following AUV, and different observations are made respectively by setting the positioning period and observation interval. After receiving position parameters from high-precision AUV with reference to AUV as relay, its own position parameters are transmitted to the AUV to be tested, and cooperative position correction of AUV cluster is completed with extended Kalman filter. Simulation results show that the AUV cluster has high positioning accuracy and small error accumulation over time, which requires less piloting AUV quantity and can achieve low power consumption and long-distance positioning of underwater targets. -
[1] ZHANG Jucheng, HAN Yunfeng, ZHENG Cuie, et al. Underwater target localization using long baseline positioning system[J]. Applied Acoustics, 2016, 111: 129–134. doi: 10.1016/j.apacoust.2016.04.009 [2] ZHANG Tao, CHEN Liping, and LI Yao. AUV underwater positioning algorithm based on interactive assistance of SINS and LBL[J]. Sensors, 2016, 16(1): 42. doi: 10.3390/s16010042 [3] LI Zhi, WANG Yilin, YANG W, et al. Development status and key navigation technology analysis of autonomous underwater vehicles[C]. The 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 2020: 1130–1133. [4] ZHOU Ziye, JIANG Yanqing, LI Ye, et al. A single acoustic beacon-based positioning method for underwater mobile recovery of an AUV[J]. International Journal of Advanced Robotic Systems, 2018, 15(5): 1–10. doi: 10.1177/1729881418801739 [5] ZHANG Meiyan and CAI Wenyu. Multi-AUV aided cooperative 3D-localization for underwater sensor networks[J]. Recent Advances in Electrical & Electronic Engineering, 2020, 13(1): 80–90. doi: 10.2174/2352096512666181219122909 [6] ZHANG Jucheng, FENG Yu, HAN Yunfeng, et al. Research on cooperative localization algorithm for multi-AUV system based on distance measurement[C]. 2019 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Dalian, China, 2019. [7] QI Yuantao, WANG Bo, WANG Shunting, et al. Cooperative navigation for multiple autonomous underwater vehicles with time delayed measurements[C]. 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 2016: 295–299. [8] YANG Yue, XIAO Yang, and LI Tieshan. A survey of autonomous underwater vehicle formation: Performance, formation control, and communication capability[J]. IEEE Communications Surveys & Tutorials, 2021, 23(2): 815–841. doi: 10.1109/COMST.2021.3059998 [9] LU Jian, CHEN Xu, LUO Maoxin, et al. Cooperative localization for multiple AUVs based on the rough estimation of the measurements[J]. Applied Soft Computing, 2020, 91: 106197. doi: 10.1016/j.asoc.2020.106197 [10] 王宏健, 王晶, 刘振业. 基于迭代扩展Kalman滤波建议分布和线性优化重采样的快速同步定位与构图[J]. 电子与信息学报, 2014, 36(2): 318–324. doi: 10.3724/SP.J.1146.2012.01373WANG Hongjian, WANG Jing, and LIU Zhenye. Fast simultaneous localization and mapping based on iterative extended Kalman filter proposal distribution and linear optimization resampling[J]. Journal of Electronics &Information Technology, 2014, 36(2): 318–324. doi: 10.3724/SP.J.1146.2012.01373 [11] 杨少凡, 余华兵, 陈新华, 等. 基于扩展Kalman滤波的单领航者自主水下航行器协同导航判别式训练方法研究[J]. 电子与信息学报, 2015, 37(11): 2756–2761. doi: 10.11999/JEIT150036YANG Shaofan, YU Huabing, CHEN Xinhua, et al. Discriminative training of Kalman filters based cooperative navigation for multiple autonomous underwater vehicles with a single leader[J]. Journal of Electronics &Information Technology, 2015, 37(11): 2756–2761. doi: 10.11999/JEIT150036 [12] 冯鹏, 熊凌. 基于分层式结构的多AUV协同导航方法及仿真[J]. 自动化与仪表, 2019, 34(2): 27–31. doi: 10.19557/j.cnki.1001-9944.2019.02.007FENG Peng and XIONG Ling. Multiple AUV cooperative navigation method and simulation based on hierarchical structure[J]. Automation &Instrumentation, 2019, 34(2): 27–31. doi: 10.19557/j.cnki.1001-9944.2019.02.007 [13] MU Xiaokai, GUO Jia, SONG Yan, et al. Application of modified EKF algorithm in AUV navigation system[C]. The OCEANS 2017 – Aberdeen, Aberdeen, UK, 2017. [14] WANG Lingxiao and PANG Shuo. AUV navigation based on inertial navigation and acoustic positioning systems[C]. The OCEANS 2018 MTS/IEEE Charleston, Charleston, USA, 2018. [15] 赵晨, 乔钢, 周锋. 基于正交移动双水下自主潜航器的水下合作目标定位方法[J]. 电子与信息学报, 2021, 43(3): 834–841. doi: 10.11999/JEIT200570ZHAO Chen, QIAO Gang, and ZHOU Feng. Underwater cooperative target localization method based on double orthogonal moving autonomous underwater vehicles[J]. Journal of Electronics &Information Technology, 2021, 43(3): 834–841. doi: 10.11999/JEIT200570 [16] SIEGERT G, BANYŚ P, MARTÍNEZ C S, et al. EKF based trajectory tracking and integrity monitoring of AIS data[C]. 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, USA, 2016: 887–897. [17] STOLL H, ZIMMER P, HARTMANN F, et al. GPS-independent localization for off-road vehicles using ultra-wideband (UWB)[C]. The 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 2017. [18] 梁国龙, 赵天白, 邹男, 等. 基于Chan算法的水下测控设备组网数据融合技术研究[J]. 电子与信息学报, 2018, 40(5): 1181–1186. doi: 10.11999/JEIT170727LIANG Guolong, ZHAO Tianbai, ZOU Nan, et al. An underwater measurement and control network centralized data fusion localization algorithm based on Chan-algorithm[J]. Journal of Electronics &Information Technology, 2018, 40(5): 1181–1186. doi: 10.11999/JEIT170727 -


 下载:
下载:






图(10)
计量
- 文章访问数: 1459
- HTML全文浏览量: 845
- PDF下载量: 187
- 被引次数: 0
