

Sensor Control Based on Multiple Feature Optimization in Multiple Extended Targets Tracking
-
摘要: 针对多扩展目标的优化跟踪问题,该文在有限集统计(FISST)理论框架下,提出一种能够综合优化多扩展目标跟踪性能的传感器控制方法。首先,该文给出加权广义最优子模式分配(WGOSPA)距离构造多扩展目标跟踪多特征估计在其统计平均周围的广义离差,进而研究提出多特征融合下的传感器控制最优决策方法,并利用序贯蒙特卡罗(SMC)技术研究传感器控制最优决策过程的数值求解方法,然后利用伽马高斯逆威沙特多伯努利(GGIW-MBer)滤波器实现所提出的传感器控制策略。最后通过仿真实验验证了所提算法的有效性。
-
关键词:
- 传感器控制 /
- 多扩展目标跟踪 /
- 评价函数 /
- 有限集统计 /
- 伽马高斯逆威沙特混合
Abstract: Focusing on the optimal tracking problem of multiple extended targets, a sensor control method is proposed, which can comprehensively optimize the tracking performance of multiple extended targets in the framework of FInite Set STatistics (FISST). First, a Weighted Generalized Optimal Sub-Pattern Assignment (WGOSPA) distance is proposed to construct multiple extended targets tracking multiple feature estimation of generalized dispersion around its statistical average. In addition, an optimal decision-making method of sensor control through the multi-characteristic fusion is studied and proposed. Furthermore, the numerical solution method of the optimal decision-making process of sensor control is studied by using Sequential Monte Carlo (SMC) technology. Then, the proposed sensor control strategy is realized by using Gamma Gaussian Inverse Wishart Multi-Bernoulli (GGIW-MBer) filter. Finally, the effectiveness of the proposed algorithm is verified by simulation experiments. -
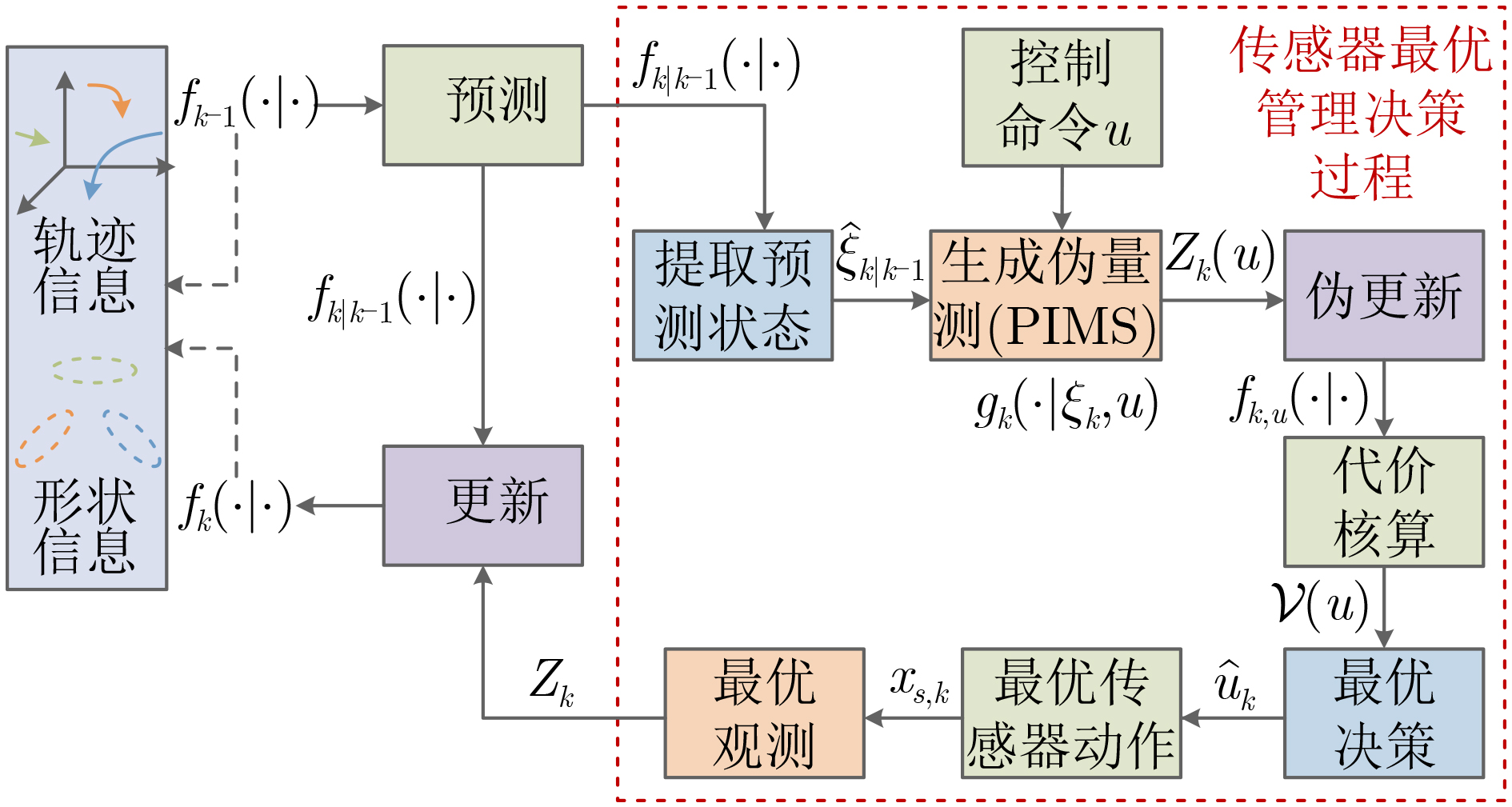
算法1 多扩展目标跟踪基于多特征优化的传感器控制算法 输入:$ k - 1 $时刻多扩展目标多特征信息$ {\zeta _{k - 1}} $与传感器坐标
${x_{{\rm{s}},k - 1} }$,其中,${\zeta _{k - 1} } = \left\{ { {\alpha _{k - 1} },{\beta _{k - 1} },{{\boldsymbol{m}}_{k - 1} },{{\boldsymbol{P}}_{k - 1} },{{\boldsymbol{v}}_{k - 1} },{{\boldsymbol{V}}_{k - 1} } } \right\}$。 (1) 多扩展目标跟踪的预测过程,得到$ {f_{k|k - 1}}\left( { \cdot | \cdot } \right) $。 (2) 传感器控制 $ {\hat \xi _{k|k - 1}} = {\text{Sef}}\left\{ {{f_{k|k - 1}}\left( { \cdot | \cdot } \right)} \right\} $, 确定所有可能的控制方案${{\boldsymbol{U}}_k}$。 ${\text{for all } }u \in {{\boldsymbol{U}}_k}{\text{ do} }$ 生成PIMS:${{\boldsymbol{Z}}_k}\left( u \right)$, 量测集划分:${\boldsymbol{\rho}} \angle {{\boldsymbol{Z}}_k}\left( u \right)$, 计算伪更新后验密度$ {f_{k,u}}\left( { \cdot | \cdot } \right) $, 提取状态的统计平均:$ {\bar \xi _{k,u}} \leftarrow {\text{Sef}}\left\{ {{f_{k,u}}\left( { \cdot | \cdot } \right)} \right\} $, 蒙特卡罗采样:$ \left\{ {{\xi _{k,l}}} \right\}_{l = 1}^L \leftarrow {\text{MC}}\left( {{f_{k,u}}\left( { \cdot | \cdot } \right),L} \right) $, $ \mathcal{V}\left( u \right) \leftarrow 0 $, $ {\text{for }}l = 1:L $ $\mathcal{V}\left( u \right) \leftarrow \mathcal{V}\left( u \right) + \dfrac{1}{L}d_p^{\left( { {c_w},\alpha } \right)}\left( { {\xi _{k,l} },{ {\bar \xi }_{k,u} } } \right)$。 $ {\text{end for}} $ $ {\text{end for}} $
$ {\hat u_k} \leftarrow \mathop {\arg \min }\limits_{u \in {U_k}} \mathcal{V}\left( u \right) $。(3) 多扩展目标跟踪的更新过程,得到$ {f_{k|k}}\left( { \cdot | \cdot } \right) $。 (4) 提取状态信息$ {\xi _k} $,并计算目标势$ {N_k} = \left| {{\xi _k}} \right| $。 输出:目标势$ {N_k} $,多扩展目标状态集$ {\xi _k} $,$ k $时刻传感器坐标
${x_{{\rm{s}},k} }$。 下载: 导出CSV
下载: 导出CSV
算法2 GGIW-MBer预测过程 输入:$ \zeta _{k - 1}^{\left( {i,j} \right)} $。 预测第$ j $个GGIW分量的参数: ${\boldsymbol{m}}_{k|k - 1}^{\left( {i,j} \right)} = {{\boldsymbol{F}}_{k|k - 1} }{\boldsymbol{m}}_{k - 1}^{\left( {i,j} \right)}$ ${\boldsymbol{P}}_{k|k - 1}^{\left( {i,j} \right)} = {{\boldsymbol{F}}_{k|k - 1} }{\boldsymbol{P}}_{k - 1}^{\left( {i,j} \right)}{\boldsymbol{F}}_{k|k - 1}^{\text{T} } + {{\boldsymbol{Q}}_k}$ $v_{k|k - 1}^{\left( {i,j} \right)} = {{\rm{e}}^{ - \frac{ { {T_{\rm{s}}} } }{\tau } } }v_{k - 1}^{\left( {i,j} \right)}$ $V_{k|k - 1}^{\left( {i,j} \right)} = \dfrac{ {v_{k|k - 1}^{\left( {i,j} \right)} - d - 1} }{ {v_{k - 1}^{\left( {i,j} \right)} - d - 1} }V_{k - 1}^{\left( {i,j} \right)}$ $X_{k|k - 1}^{\left( {i,j} \right)} = \dfrac{ {V_{k|k - 1}^{\left( {i,j} \right)} } }{ {v_{k|k - 1}^{\left( {i,j} \right)} - 2d - 2} }$ $\alpha _{k|k - 1}^{\left( {i,j} \right)} = \dfrac{ {\alpha _{k - 1}^{\left( {i,j} \right)} } }{ { {\eta _{k - 1} } } }$ $\beta _{k|k - 1}^{\left( {i,j} \right)} = \dfrac{ {\beta _{k - 1}^{\left( {i,j} \right)} } }{ { {\eta _{k - 1} } } }$ 输出:$ \zeta _{k|k - 1}^{\left( {i,j} \right)} $。
下载: 导出CSV
算法3 GGIW-MBer更新过程 输入:$ \zeta _{k|k - 1}^{\left( {i,j} \right)} $,量测集划分${\boldsymbol{W}}$。 更新第$ j $个GGIW分量的参数:
$\bar z_k^W = \dfrac{1}{ {\left| {\boldsymbol{W} } \right|} }\displaystyle\sum\limits_{z_k^{\left( i \right)} \in W} { {\boldsymbol{z} }_k^{\left( i \right)} }$${\boldsymbol{X}}_{k|k - 1}^{\left( {i,j} \right)} = \dfrac{ {{\boldsymbol{V}}_{k|k - 1}^{\left( {i,j} \right)} } }{ {v_{k|k - 1}^{\left( {i,j} \right)} - 2d - 2} }$ ${\boldsymbol{S} }_{k|k - 1}^{\left( {i,j,W} \right)} = { {\boldsymbol{H} }_k}{\boldsymbol{P} }_{k|k - 1}^{\left( {i,j} \right)}{\boldsymbol{H} }_k^{\text{T} } + \dfrac{ { {\boldsymbol{X} }_{k|k - 1}^{\left( {i,j} \right)} } }{ {\left| {\boldsymbol{W} } \right|} }$ ${\boldsymbol{K}}_{k|k - 1}^{\left( {i,j,W} \right)} = {\boldsymbol{P}}_{k|k - 1}^{\left( {i,j} \right)}{\boldsymbol{H}}_k^{\text{T} }{\left( {{\boldsymbol{S}}_{k|k - 1}^{\left( {i,j,W} \right)} } \right)^{ - 1} }$ ${\boldsymbol{\varepsilon}} _{k|k - 1}^{\left( {i,j,W} \right)} = \bar {\boldsymbol{z}}_k^W - {{\boldsymbol{H}}_k}{\boldsymbol{m}}_{k|k - 1}^{\left( {i,j} \right)}$ ${\boldsymbol{m}}_k^{\left( {i,j} \right)} = {\boldsymbol{m}}_{k|k - 1}^{\left( {i,j} \right)} + {\boldsymbol{K}}_{k|k - 1}^{\left( {i,j,W} \right)}{\boldsymbol{\varepsilon}} _{k|k - 1}^{\left( {i,j,W} \right)}$ ${\boldsymbol{P}}_k^{\left( {i,j} \right)} = {\boldsymbol{P}}_{k|k - 1}^{\left( {i,j} \right)} - {\boldsymbol{K}}_{k|k - 1}^{\left( {i,j,W} \right)}{\boldsymbol{S}}_{k|k - 1}^{\left( {i,j,W} \right)}{\left( {{\boldsymbol{K}}_{k|k - 1}^{\left( {i,j,W} \right)} } \right)^{\text{T} } }$ ${\boldsymbol{Z}}_k^W = \displaystyle\sum\limits_{z_k^{\left( i \right)} \in W} {\left( {{\boldsymbol{z}}_k^{\left( i \right)} - \bar {\boldsymbol{z}}_k^W} \right){ {\left( {{\boldsymbol{z}}_k^{\left( i \right)} - \bar {\boldsymbol{z}}_k^W} \right)}^{\text{T} } } }$ $\begin{aligned} {\boldsymbol{N} }_{k|k - 1}^{\left( {i,j,W} \right)} =& {\left( { {\boldsymbol{X} }_{k|k - 1}^{\left( {i,j} \right)} } \right)^{\frac{1}{2} } }{\left( { {\boldsymbol{S} }_{k|k - 1}^{\left( {i,j,W} \right)} } \right)^{ - \frac{1}{2} } }{\boldsymbol{\varepsilon} } _{k|k - 1}^{\left( {i,j,W} \right)}{\text{ } } \times {\left( { {\boldsymbol{\varepsilon} } _{k|k - 1}^{\left( {i,j,W} \right)} } \right)^{\text{T} } }\\ & \cdot{\left(\left( { {\boldsymbol{S} }_{k|k - 1}^{\left( {i,j,W} \right)} } \right)^{ -\frac {1} {2} } \right)^{ {\rm{T} } } }\left({\left( { {\boldsymbol{X} }_{k|k - 1}^{\left( {i,j} \right)} } \right)^{\frac{ 1}{2} } }\right)^{\rm{T} }\end{aligned}$ $v_k^{\left( {i,j,W} \right)} = v_{k|k - 1}^{\left( {i,j,W} \right)} + \left| {\boldsymbol{W}} \right|$ ${\boldsymbol{V}}_k^{\left( {i,j,W} \right)} = {\boldsymbol{V}}_{k|k - 1}^{\left( {i,j,W} \right)} + {\boldsymbol{N}}_{k|k - 1}^{\left( {i,j,W} \right)} + {\boldsymbol{Z}}_k^W$
${\boldsymbol{X} }_k^{\left( {i,j,W} \right)} = \dfrac{ { {\boldsymbol{V} }_k^{\left( {i,j,W} \right)} } }{ {v_k^{\left( {i,j,W} \right)} - 2d - 2} }$$\alpha _k^{\left( {i,j,W} \right)} = \alpha _{k|k - 1}^{\left( {i,j,W} \right)} + \left| {\boldsymbol{W}} \right|$ $ \beta _k^{\left( {i,j,W} \right)} = \beta _{k|k - 1}^{\left( {i,j,W} \right)} + 1 $ 输出:$ \zeta _k^{\left( {i,j} \right)} $。
下载: 导出CSV
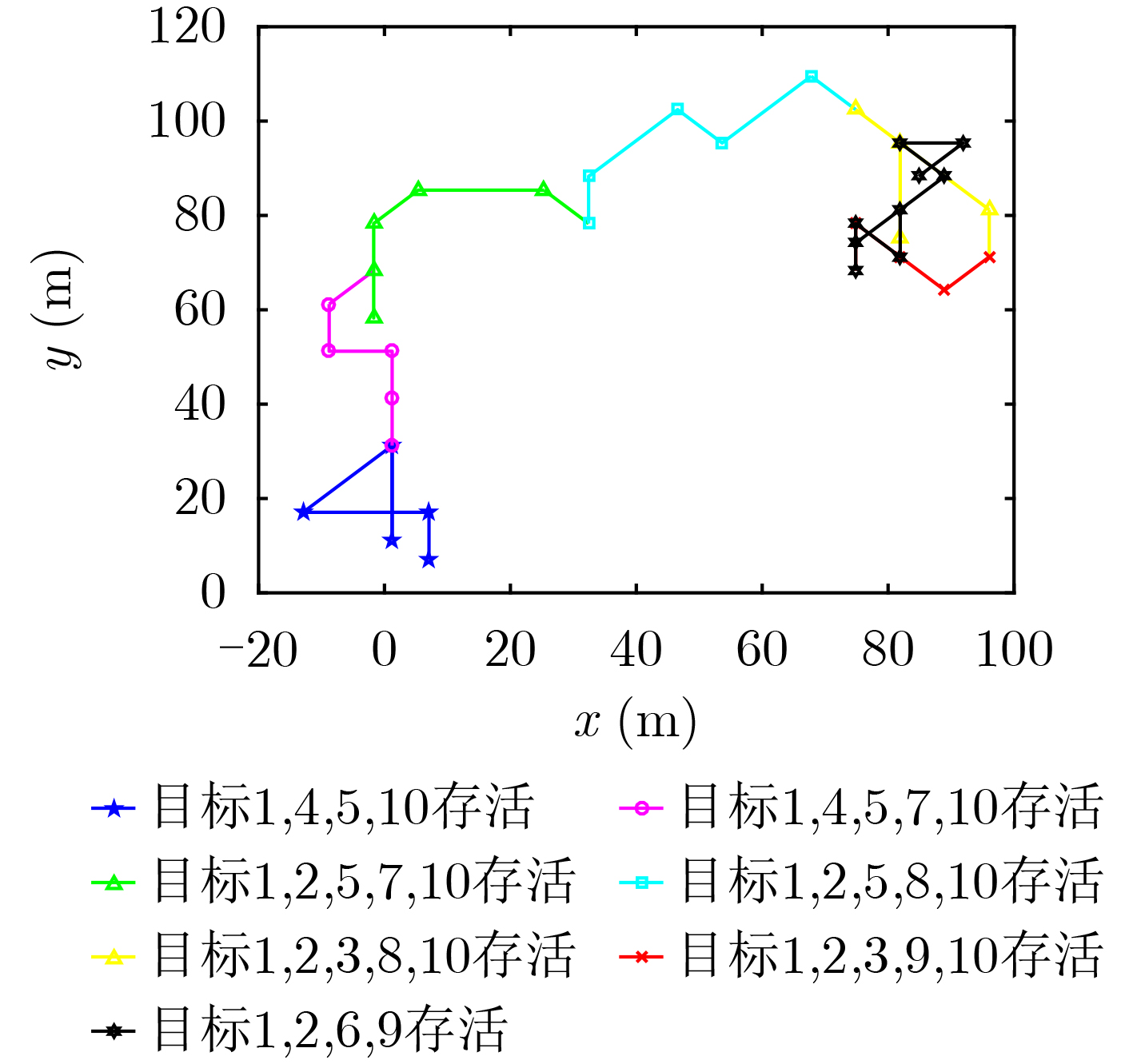
表 1 多扩展目标初始参数
目标 出生时刻
(s)消亡时刻
(s)初始状态
(m; m; m/s; m/s)1 1 40 [–800; 600; 40; –15] 2 11 40 [–700; 0; 40; –10] 3 21 30 [–100; 500; –35; –20] 4 1 10 [200; 100; 10; 20] 5 1 20 [–500; 100; –15; –15] 6 31 40 [–100; 100; 20; –15] 7 6 15 [500; 300; 10; 10] 8 16 25 [–200; 300; –20; –60] 9 26 35 [–200; –300; 40; –15] 10 1 30 [300; –100; –20; –20]
下载: 导出CSV
-
[1] SHIN D, SONG Y, OH J, et al. Nonlinear disturbance observer-based standoff target tracking for small fixed-wing UAVs[J]. International Journal of Aeronautical and Space Sciences, 2021, 22(1): 108–119. doi: 10.1007/s42405-020-00275-6 [2] KIM D Y, VO B N, VO B T, et al. A labeled random finite set online multi-object tracker for video data[J]. Pattern Recognition, 2019, 90: 377–389. doi: 10.1016/j.patcog.2019.02.004 [3] 陈辉, 邓东明, 韩崇昭. 基于区间箱粒子多伯努利滤波器的传感器控制策略[J]. 自动化学报, 2021, 47(6): 1428–1443. doi: 10.16383/j.aas.c180541CHEN Hui, DENG Dongming, and HAN Chongzhao. Sensor control based on interval box-particle multi-Bernoulli filter[J]. Acta Automatica Sinica, 2021, 47(6): 1428–1443. doi: 10.16383/j.aas.c180541 [4] 陈辉, 李国财, 韩崇昭, 等. 高斯过程回归模型多扩展目标多伯努利滤波器[J]. 控制理论与应用, 2020, 37(9): 1931–1943. doi: 10.7641/CTA.2020.90978CHEN Hui, LI Guocai, HAN Chongzhao, et al. A multiple extended target multi-Bernouli filter based on Gaussian process regression model[J]. Control Theory &Applications, 2020, 37(9): 1931–1943. doi: 10.7641/CTA.2020.90978 [5] CORALUPPI S, CARTHEL C, KREAMER W, et al. New graph-based and MCMC approaches to multi-INT surveillance[C]. The 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 2016: 394–401. [6] BOSTRÖM-ROST P, AXEHILL D, and HENDEBY G. PMBM filter with partially grid-based birth model with applications in sensor management[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(1): 530–540. doi: 10.1109/TAES.2021.3103255 [7] HERO A O and COCHRAN D. Sensor management: Past, present, and future[J]. IEEE Sensors Journal, 2011, 11(12): 3064–3075. doi: 10.1109/JSEN.2011.2167964 [8] 陈辉, 韩崇昭. 机动多目标跟踪中的传感器控制策略的研究[J]. 自动化学报, 2016, 42(4): 512–523. doi: 10.16383/j.aas.2016.c150529CHEN Hui and HAN Chongzhao. Sensor control strategy for maneuvering multi-target tracking[J]. Acta Automatica Sinica, 2016, 42(4): 512–523. doi: 10.16383/j.aas.2016.c150529 [9] 罗开平, 姜维, 李一军. 传感器管理述评[J]. 电子学报, 2010, 38(8): 1900–1907.LUO Kaiping, JIANG Wei, and LI Yijun. Review of sensor management[J]. Acta Electronica Sinica, 2010, 38(8): 1900–1907. [10] MAHLER R P S. Advances in Statistical Multisource-Multitarget Information Fusion[M]. Boston: Artech House, 2014: 825–860. [11] MAHLER R P S. Statistical Multisource-Multitarget Information Fusion[M]. Boston: Artech House, 2007: 655–667. [12] 杨威, 付耀文, 龙建乾, 等. 基于有限集统计学理论的目标跟踪技术研究综述[J]. 电子学报, 2012, 40(7): 1440–1448. doi: 10.3969/j.issn.0372-2112.2012.07.025YANG Wei, FU Yaowen, LONG Jianqian, et al. The FISST-based target tracking techniques: A survey[J]. Acta Electronica Sinica, 2012, 40(7): 1440–1448. doi: 10.3969/j.issn.0372-2112.2012.07.025 [13] AUGHENBAUGH J M and LA COUR B R. Metric selection for information theoretic sensor management[C]. The 11th International Conference on Information Fusion, Cologne, Germany, 2008: 1–8. [14] HOANG H G, VO B N, VO B T, et al. The Cauchy–Schwarz divergence for Poisson point processes[J]. IEEE Transactions on Information Theory, 2015, 61(8): 4475–4485. doi: 10.1109/TIT.2015.2441709 [15] 陈辉, 贺忠良, 邓东明, 等. 高斯混合多伯努利滤波器基于柯西施瓦兹散度的传感器控制方法[J]. 电子学报, 2020, 48(4): 706–716. doi: 10.3969/j.issn.0372-2112.2020.04.012CHEN Hui, HE Zhongliang, DENG Dongming, et al. Sensor control using Cauchy-Schwarz divergence via Gaussian mixture multi-Bernoulli filter[J]. Acta Electronica Sinica, 2020, 48(4): 706–716. doi: 10.3969/j.issn.0372-2112.2020.04.012 [16] RISTIC B, VO B N, and CLARK D. A note on the reward function for PHD filters with sensor control[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1521–1529. doi: 10.1109/TAES.2011.5751278 [17] 陈辉, 贺忠良, 连峰, 等. 多目标跟踪中基于目标威胁度评估的传感器控制方法[J]. 电子与信息学报, 2018, 40(12): 2861–2867. doi: 10.11999/JEIT180212CHEN Hui, HE Zhongliang, LIAN Feng, et al. Threat assessment based sensor control for multi-target tracking[J]. Journal of Electronics &Information Technology, 2018, 40(12): 2861–2867. doi: 10.11999/JEIT180212 [18] KATSILIERIS F, DRIESSEN H, and YAROVOY A. Threat-based sensor management for target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 2772–2785. doi: 10.1109/TAES.2015.140052 [19] HOANG H G and VO B T. Sensor management for multi-target tracking via multi-Bernoulli filtering[J]. Automatica, 2014, 50(4): 1135–1142. doi: 10.1016/j.automatica.2014.02.007 [20] GOSTAR A K, HOSEINNEZHAD R, and BAB-HADIASHAR A. Multi-Bernoulli sensor control via minimization of expected estimation errors[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 1762–1773. doi: 10.1109/TAES.2015.140211 [21] MAHLER R P S and ZAJIC T R. Probabilistic objective functions for sensor management[J]. SPIE, 2004, 233–244. [22] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042–1059. doi: 10.1109/TAES.2008.4655362 [23] FELDMANN M, FRÄNKEN D, and KOCH W. Tracking of extended objects and group targets using random matrices[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1409–1420. doi: 10.1109/TSP.2010.2101064 [24] TUNCER B and ÖZKAN E. Random matrix based extended target tracking with orientation: A new model and inference[J]. IEEE Transactions on Signal Processing, 2021, 69: 1910–1923. doi: 10.1109/TSP.2021.3065136 [25] BAUM M and HANEBECK U D. Random hypersurface models for extended object tracking[C]. 2009 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Ajaman, United Arab Emirates, 2009: 178–183. [26] WAHLSTRÖM N and ÖZKAN E. Extended target tracking using Gaussian processes[J]. IEEE Transactions on Signal Processing, 2015, 63(16): 4165–4178. doi: 10.1109/TSP.2015.2424194 [27] 陈辉, 杜金瑞, 韩崇昭. 基于星凸形随机超曲面模型多扩展目标多伯努利滤波器[J]. 自动化学报, 2020, 46(5): 909–922. doi: 10.16383/j.aas.c180130CHEN Hui, DU Jinrui, and HAN Chongzhao. A multiple extended target multi-bernouli filter based on star-convex random hypersurface model[J]. Acta Automatica Sinica, 2020, 46(5): 909–922. doi: 10.16383/j.aas.c180130 [28] MAHLER R. PHD filters for nonstandard targets, I: Extended targets[C]. The 12th International Conference on Information Fusion, Seattle, USA, 2009: 915–921. [29] GOSTAR A K, HOSEINNEZHAD R, BAB-HADIASHAR A, et al. Sensor-management for multitarget filters via minimization of posterior dispersion[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(6): 2877–2884. doi: 10.1109/TAES.2017.2718280 [30] RAHMATHULLAH A S, GARCÍA-FERNÁNDEZ Á F, and SVENSSON L. Generalized optimal sub-pattern assignment metric[C]. The 20th International Conference on Information Fusion (Fusion), Xi’an, China, 2017: 1–8. -

 下载:
下载:







图(9) / 表(6)
计量
- 文章访问数: 1082
- HTML全文浏览量: 447
- PDF下载量: 72
- 被引次数: 0
